
Abstract
Study design
Experimental in vivo study of the pressure exerted on the spine of a pig by a new cyclic anterior vertebral body tethering (AVBT) prototype.
Objectives
To evaluate the relationship between the tether tension and the pressures transmitted onto the vertebral end plates by a cyclic AVBT prototype.
Summary of background data
AVBT is a recent surgical technique for the treatment of pediatric scoliosis that compresses the convex side of the spine with a sustained tension, to modulate the growth to progressively correct the deformity over time. Previous studies demonstrated that cyclic compression has similar growth modulation capacity but with less detrimental effects on the integrity of the discs and growth plates.
Methods
A 3-month-old healthy Duroc pig was anesthetized and a lateral thoracotomy was performed. The T7–T10 segment was instrumented and compressed during 50 s with the load oscillating (0.2 Hz) from + 30 to − 30% of the following mean tensions: 29, 35, 40, 44, and 49 N. The pressure exerted on T9 superior vertebral end plate was monitored during the cyclic loading. Three repetitions of each test were performed.
Results
The resulting mean pressure exerted on the vertebral end plate was linearly correlated with the mean tether tension (r2 = 0.86). Each cycle translated in a hysteresis profile of the measured pressure and tension, with amplitudes varying between ± 11.5 and ± 29.9%.
Conclusions
This experimental study documented the relationship between the tether tension and the pressure. This study confirmed the feasibility of cyclic AVBT principle to transfer varying pressures on the vertebral end plates, which is intended to control vertebral growth, while keeping the spine flexibility and preserving the health of soft tissues such as the intervertebral discs and the growth plate but remained to be further verified.
Level of evidence
Level IV.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
In an effort to preserve patient’s spine mobility, a new surgical technique using growth modulation through a compression-based technique was recently introduced for patients with severe pediatric scoliosis with significant growth potential remaining. It consists of a tether tensioned laterally on the convexity of the scoliotic curvature between each pair of vertebrae within the instrumented segment [1,2,3]. The applied compression is intended to reduce the spine curvature both during surgery and over time [3,4,5,6] based on the Hueter–Volkmann principle, which states that an increased pressure of the growth plates inhibits the growth rate, whereas a tension stimulates it [7, 8].
During surgery, screws are inserted in each vertebral body of the instrumented segment. The tether is fixed in one of the screw heads, pulled to create a compression between each pair of vertebra and fixed in the following screw head. This action is repeated for each pair of vertebrae in the instrumented segment. The tether tension set during surgery leads to a sustained compression of the spine and soft tissues. Static loads and overloads were shown to lead to premature degeneration of the intervertebral discs [9, 10], as well as to a degradation of the growth plates [11, 12]. To prevent such problems, the use of cyclically varying compression at 0.1 Hz, instead of sustained compression, was investigated by Valteau et al. [13]. In vivo experiments performed on rat and mouse tail vertebrae showed that an axial cyclic compression enables similar growth modulation as compared with sustained compression [13, 14], but with a better preservation of disc health and caudal vertebral soft tissues [13,14,15,16,17].
We aim at bridging the gap between (1) the experimental research that focused on an axial and cyclic compression on small animal models and (2) the anterior vertebral body tethering (AVBT) surgery that applies a sustained unilateral compression in humans. Hence, we developed a novel AVBT system where the tether tension is cyclically modified. In this article, we tested the feasibility of this cyclic AVBT prototype on a pig model, with the specific objective to better understand the mechanics of the tether compression of the spine and further investigate the varying pressures exerted on the vertebral end plates during the cyclic compression.
Materials and methods
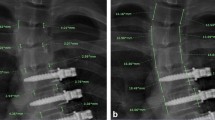
A 3-month-old asymptomatic Duroc Landrace pig (female, 50 kg) was anesthetized and had a left unilateral intubation. The pig was placed in lateral decubitus and a right posterolateral thoracotomy was performed to expose the T7–T10 spinal segment. The custom-made novel cyclic AVBT prototype developed for this study was composed of custom screws (length: 19 mm; diameter: 3.5 mm), a Bowden-type cable assembly (inner tether and outer sheath), and a motor box. The screws were inserted laterally in each vertebral body and their insertion was verified with fluoroscopy (Fig. 1a).

a View of the screw and tether placement on the spine of the pig before any tension is applied. b View of the sensor placed through the thoracic cage and slid in between the T8–T9 disc and the T9 vertebral end plate to document the effect of the cyclic tension. The tether sheath is passing through a small hole from the distal vertebra to the motor box (out of frame)
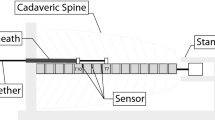
A small hole was perforated through the torso skin further down the spine to allow the cable assembly to enter the pig’s body parallel to the spine (Fig. 1b). The inner tether (1.6-mm-diameter stainless steel braided cable) was then slid up to T7, where it was securely locked with a set screw (Fig. 2). The inner tether was also placed in the remaining screw heads and the set screws were added but not tightened so that the inner tether could slide from T7 to the outside, where it was pulled by a motor located in a motor box. The axially rigid outer sheath (stainless steel with an inner coating of polytetrafluoroethylene [PTFE], 5 mm inner diameter) was fixed caudally at T10 screw. From T10 to the motor box outside, the axially rigid outer sheath, inside which the inner tether could slide, acted as a fulcrum (Fig. 1b). Pulling on this Bowden-type cable assembly with the motor, thus, resulted in a cyclic compression of the whole instrumented segment T7–T10.

Schematic of the cyclic anterior vertebral body tethering (AVBT) prototype installed on the anesthetized pig. The dashed area represents the area inside the pig. Red arrows indicate forces
The cyclic tensioning was applied with an automated system enclosed in a motor box. It included the motor pulling the tether, the controller driving the motor according to sensor data, the connection to power, and a computer for data transfer and monitoring. Once installed, the cyclic compression was applied until the experimenter pressed a stop button. The tether tensioning was applied by a DC motor (A-max 26 ∅26 mm, Precious Metal Brushes CLL, 4.5 watts) with a planetary gearhead (GP 32 A Ø32 mm, 4.5 Nm) and an encoder (HEDS 5540, 500-pulse, 3-channel from Maxon Motor, Switzerland) controlled by a microcontroller (Teensy 3.2; PJRC, OR, USA). Two sensors (single tact, 8-mm-diameter; Pressure Profile system, LA, USA, force range 0–100 N, resolution < 0.2 N) were placed on the motor box to acquire the tether tension. The instrumented segment was cyclically compressed at 0.2 Hz by controlling the tether tension with a proportional–integral–derivative controller (PID). The motor box was on the surgical table, in line with the tether. Because the specimen would not be awakened or moving, the motor box did not need to be fixed onto the body of the specimen. Five different test studies were conducted, each with a different mean target nominal tether tension: 29, 35, 40, 44, and 49 N, with a cyclic amplitude (difference between minimum and maximum tether tension) of ± 30% around this mean targeted tension (Fig. 3).

Cycles of tether tension applied (mean tether tension of the three repetitions)
Each test study was repeated three times during at least ten cycles (and for a maximum of 15 cycles). The pressure exerted on the vertebral end plate located in the middle of the tested segment was recorded for monitoring and postanalysis purposes, using a thin sensor inserted between the T9 superior end plate and the adjacent disc after a small incision was made with a thin scalpel (Fig. 4). The bone and disc junction was located visually and by touch owing to differences in texture, size, shape, and hardness.

Sensor placement in between the disc and vertebral end plate at T9. The external part of the sensor is held in a casing for easier handling
Before the beginning of each test, the presenting pressure applied on the monitored vertebral end plate and the tether tension were measured to represent the baseline values without load, and all subsequent data were further computed relative to them.
Results
The relationship between the average measured pressure exerted on the end plate and the average measured tension was linear (linear regression, r2 = 0.86), as shown in Fig. 5, where each data point represents the average measured pressure and tether tension of the full tested cycle, for each repetition (three) of each test study (five).

Averaged measured pressure and tension for each repetition (three) of each test study (five) are represented by an asterisk
Each cycle within a test study showed a hysteresis behavior of the measured pressure and tension, with amplitudes varying between ± 11.5 and ± 29.9% (Fig. 6).

Measured pressure vs. measured tension for the five test studies (average targeted nominal tension of 29, 35, 40, 44, and 49 N). The wide hollow arrows indicate the direction of the loading/unloading cycles. Each graph includes the raw data of the loading cycles for the three repetitions
Discussion
The mean tether tension was linearly correlated with the mean pressure transmitted to the end plate located in the middle of the instrumented spine, which is consistent with documented in vivo results with sustained compression on healthy pigs [18] and ex vivo on cadaveric pigs [19]. Pressure and tension data were obtained with the pig anesthetized and in a lateral decubitus position, thus representing only the loads applied to the spine by the cyclically pulled tether. It is expected that the pressure in a living, moving animal and in an upright stance would be different because of the body position, motion, or functional loads that will be added to (or removed from) the pressure coming from the tether.
Each loading cycle resulted in a hysteresis profile, which is characteristic of viscoelastic materials such as intervertebral discs in the spine [20]. This short-term experiment could not evaluate long-term disc health or instrumentation fatigue, but similar studies on rodents with cyclic and static compression during 15 days [13, 14] did not report any sign of tissue or instrumentation fatigue and showed better disc health for the cyclic compression compared with the equivalent sustained compression. Pressures applied on the vertebrae may also evolve over time as depicted by Bylski-Austrow’s work [21], where a fixed staple led to an increased pressure in the disc’s annulus over the course of 5 days.
The observed difference of pressure amplitude between tests is attributable to the viscoelasticity of the disc and the fact that the loading rate of the five tested tether tensions was different (± 30% of the targeted tensions, but at the same frequency).
In this study, the pressure was recorded only at one level based on a recent study showing that the pressure exerted on vertebral end plates is similar within the instrumented segment [19]. Over time, this pressure similarity within the instrumented segment will lead to a similar growth modulation of each vertebra as previously demonstrated by fundamental work on the growth plate under cyclic pressure [8].
Porcine vertebrae, contrary to human, have a second center of ossification above the growth plate. As pig and human spines exhibit similar bone microstructures [22], it is believed that the conclusions of this study are transferable and applicable to the pressure that would be applied on the growth plate of human pediatric spines.
The required tether tension in a human scoliotic spine would be patient specific because of the patient’s flexibility and curve severity. Additional pressure from gravitational loads and the pressure buildup due to the scoliotic spine will be present on human scoliotic cases. However, it is expected that these loads are independent of the tether compression. The pressure due to the tether will add up to the physiological loads. Calibrations will, however, be required to evaluate the proper tether tension and quantify the physiological pressure from a moving animal.
Our data were acquired on one pig, and more specimens should be included in the future. This study was a necessary first step. The ability of the device to apply a cyclic compression of the instrumented segment within the growth modulation range of pressure (0.1–0.6 MPa [8]) was previously unknown. Our study provides the first data necessary for further investigation.
Improvement of the prototype, such as the miniaturization of the motor box is required to be worn as an external bag or under the skin. The wearability of the device is expected to be a crucial factor regarding the patient acceptability.
An evaluation of any future version of the cyclic AVBT prototype would be necessary, in particular, regarding its ability to promote the growth modulation to correct scoliotic curvatures while preserving the intervertebral discs and a fatigue analysis of the system.
Conclusion
This study showed the feasibility of a cyclic and compression-based AVBT prototype to apply varying pressures on vertebral end plates, while documenting its action. The pressure–tension relationship was linear and the repeated loading cycles resulted in a hysteresis behavior.
References
Pahys JM, et al (2015) The first 100 consecutive anterior vertebral body tethering procedures for immature adolescent idiopathic scoliosis at a single institution: outcomes and complications in the early postoperative period. Paper presented at: IMAST 2015: International Meeting on Advanced Spine Techniques; July 8-–11, 2015, Kuala Lumpur; 200–1
Newton PO, Saito W, Burt Y, et al (2016) Successes and failures following spinal growth tethering for scoliosis—a retrospective look 2–4 years later. Paper presented at: 51st Annual Meeting and Course of the Scoliosis Research Society, September 21–24, 2016; Prague, Czech Republic
Cobetto N, Parent S, Aubin CE (2018) 3D correction over 2 years with anterior vertebral body growth modulation: a finite element analysis of screw positioning, cable tensioning and postoperative functional activities. Clin Biomech 51:26–33
Cobetto N, Aubin CE, Parent S (2018) Surgical planning and follow-up of anterior vertebral body growth modulation in pediatric idiopathic scoliosis using a patient-specific finite element model integrating growth modulation. Spine Deform 6:344–350
Driscoll M, Aubin CE, Moreau A, Parent S (2011) Biomechanical comparison of fusionless growth modulation corrective techniques in pediatric scoliosis. Med Biol Eng Comput 49:1437–1445
Cobetto N, Aubin CE, Parent S (2018) Contribution of lateral decubitus positioning and cable tensioning on immediate correction in anterior vertebral body growth modulation. Spine Deform 6:507–513
Schlager B, Ismael Aguirre MF, Wilke HJ, Galbusera F (2018) Scoliosis. Elsevier, New York
Villemure I, Stokes IAF (2009) Growth plate mechanics and mechanobiology. A survey of present understanding. J Biomech 42:1793–1803
Stokes IAF, Iatridis JC (2004) Mechanical conditions that accelerate intervertebral disc degeneration: overload versus immobilization. Spine (Phila Pa 1976) 29:2724–2732
Lotz JC, Hsieh AH, Walsh AL et al (2002) Mechanobiology of the intervertebral disc. Biochem Soc Trans 30:853–858
Cancel M, Grimard G, Thuillard-Crisinel D et al (2009) Effects of in vivo static compressive loading on aggrecan and type II and X collagens in the rat growth plate extracellular matrix. Bone 44:306–315
Stokes IA, Mente PL, Iatridis JC et al (2002) Enlargement of growth plate chondrocytes modulated by sustained mechanical loading. J Bone Jt Surg Am 84:1842–1848
Valteau B, Grimard G, Londono I et al (2011) In vivo dynamic bone growth modulation is less detrimental but as effective as static growth modulation. Bone 49:996–1004
Ménard AL, Grimard G, Valteau B et al (2014) In vivo dynamic loading reduces bone growth without histomorphometric changes of the growth plate. J Orthop Res 32:1129–1136
Benoit A, Mustafy T, Londono I et al (2016) In vivo dynamic compression has less detrimental effect than static compression on newly formed bone of a rat caudal vertebra. J Musculoskelet Neuronal Interact 16:211–220
Akyuz E, Braun JT, Brown NAT, Bachus KN (2006) Static versus dynamic loading in the mechanical modulation of vertebral growth. Spine (Phila Pa 1976) 31:952–958
Walsh AJL, Lotz JC (2004) Biological response of the intervertebral disc to dynamic loading. J Biomech 37:329–337
Ekström L, Holm S, Holm AK, Hansson T (2004) In vivo porcine intradiscal pressure as a function of external loading. J Spinal Disord Tech 17:312–316
Lalande V, Villemure I, Parent S, Aubin CÉ (2018) Induced pressures on the epiphyseal growth plate with anterior vertebral body tethering. Spine Deform (Accepted)
Malandrino A (2018) Intervertebral disc. Biomech Spine 2018:89–103
Bylski-Austrow DI, Glos DL, Sauser FE et al (2012) In vivo dynamic compressive stresses in the disc annulus. Spine (Phila Pa 1976) 37:949–956
Smit TH (2002) The use of a quadruped as an in vivo model for the study of the spine—biomechanical considerations. Eur Spine J 11:137–144
Acknowledgements
The authors acknowledge the help of Caroline Bouchard’s team from Sacré-Coeur Hospital, as well as Laure Boyer and Roxanne Dube-Cyr, for their help before and during the experimental testing. This project was funded by the Natural Sciences and Engineering Research Council of Canada (Industrial Research Chair program with Medtronic of Canada) (Grant number PCIPJ-346145).
Funding
Pr Aubin Grant: Natural Sciences and Engineering Research Council of Canada (Industrial Research Chair program with Medtronic of Canada) (Grant number PCIPJ-346145).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
VL (Grants from Natural Sciences and Engineering Research Council of Canada [NSERC], during the conduct of the study), IV (Grants from NSERC, during the conduct of the study; in addition, IV has a patent “CE Aubin, S Parent, I Villemure, S Amini, M Driscoll, F Moldovan, Dynamic Fusionless Device for the Correction of Adolescent Idiopathic Scoliosis [WO2014127464 A1, Aug 28, 2014]” issued), MV (none), SP (Grants from NSERC, during the conduct of the study; personal fees from EOS-imaging, Spinologics, K2M, Medtronic, and DePuy Synthes Spine; other from Academic Research Chair in Spine Deformities of the CHU Sainte-Justine (DePuy); Grants from DePuy Synthes Spine, Canadian Institutes of Health Research, Pediatric Orthopaedic Society of North America, and Scoliosis Research Society; grants from Medtronic, EOS imaging, Canadian Foundation for Innovation, Setting Scoliosis Straight Foundation, NSERC, Fonds de recherche Québec–Santé, and Orthopaedic Research and Education Foundation; other from DePuy Synthes and Medtronic, outside the submitted work; in addition, SP has a patent “CE Aubin, S Parent, I Villemure, S Amini, M Driscoll, F Moldovan, Dynamic Fusionless Device for the Correction of Adolescent Idiopathic Scoliosis [WO2014127464 A1, Aug 28, 2014]” issued), CÉA (Grants from Natural Sciences and Engineering Research Counsil of Canada (NSERC), during the conduct of the study; grants from Medtronic, outside the submitted work; in addition, CÉA has a patent “CE Aubin, S Parent, I Villemure, S Amini, M Driscoll, F Moldovan, Dynamic Fusionless Device for the Correction of Adolescent Idiopathic Scoliosis [WO2014127464 A1, Aug 28, 2014]” issued).
Ethical approval
Approved by the “comité d’éthique de l’expérimentation animale” (CÉEA) from the Centre de recherche de l’hôpital du Sacré-Cœur de Montréal (no. PARS01).
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Lalande, V., Villemure, I., Vonthron, M. et al. Cyclically controlled vertebral body tethering for scoliosis: an in vivo verification in a pig model of the pressure exerted on vertebral end plates. Spine Deform 8, 39–44 (2020). https://doi.org/10.1007/s43390-019-00021-3
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s43390-019-00021-3