
Abstract
This manuscript introduces new synchronization methods, viz., modified fractional and inverse matrices hybrid function projective difference synchronization based on active control method. The main advantage of this method lies in its comprising of different synchronization schemes applicable componentwise, thereby strengthening the anti-attack capability in secure communications. Numerical simulations have been performed on complex fractional Rikitake system, El-Nino system, and generalized Lotka Volterra systems which verify the efficacy of the designed scheme by achieving quicker synchronization. Comparison of results with some previous published results have been made and application of synchronized methods in secure communication is made.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
Introduction
Ever since the first chaotic attractor was discovered (1963) and the significant work of synchronization was established by Pecora and Carroll [23] (1990), chaos theory and synchronization has invoked huge interest among researchers. The careful modeling of chaotic systems and designing of various control techniques [18] have been done [33] such as active control, sliding mode control, feedback control, adaptive control, tracking control, etc., developing various synchronization schemes such as complete synchronization, anti-synchronization [6, 17], projective synchronization, function projective synchronization, compound synchronization [12], dislocated synchronization [15], and so on [9,10,11, 13, 32, 34].
By synchronization [16], we mean that the trajectories of two different chaotic systems take a common path. Where, on one hand, synchronizing two chaotic systems [7] is in itself a big challenge, to synchronize the different co-ordinates of the systems by different synchronization techniques adds to the complexity of the goal to be attained. Undoubtedly, achieving this modified synchronization [20] would bring nightmares to the hackers as it would be very difficult to predict the order in which different co-ordinates have been synchronized. In other words, anti-attack resistance of systems would increase which would be fruitful in fields of secure communication, data encryption, cryptography, etc. [8, 10, 14, 27,28,29]. Also, with the introduction of fractional-ordered systems [1, 5, 24], more accurate modeling of chaotic systems is possible. One of the reasons of the gaining popularity of fractional-ordered systems is their ability to model memory properties in life models. It is worth noting that most of the published literary work includes the projective matrix as a scalar matrix or a diagonal matrix with constant elements [4]. However, in our work, we have considered the projective matrix as non-diagonal matrix with non-constant, time-variant entries too. Certainly, not much work has been done using difference synchronization [3] which happens to be an alternative to combination synchronization.
The rest of manuscript is laid out as follows: Sect. 2 consists of some preliminaries and stability criterion. Section 3 includes problem formulation of modified fractional and inverse matrices hybrid function projective difference synchronization scheme. In Sect. 4, we have described the systems on which numerical simulations have been performed. Section 5 consists of the discussions on numerical simulations and displays the results performed in MATLAB. Section 6 compares the attained results with some previous published results. Section 7 illustrates the synchronization results in secure communication and Sect. 8 concludes the article.
Preliminaries
Definition
Caputo Definition: [26]
where n is integer, \(\alpha\) is real number, \((n-1)\le \alpha < n\), and \(\Gamma (.)\) is the Gamma function.
Throughout our studies, Caputo’s version of fractional derivative has been used.
Stability Criterion
-
(i)
Consider the system:
$$\begin{aligned} _{a}D_t^{q}z_i=h_i(z_1,z_2, \ldots , z_n), 0<q<1,i=1,2, \ldots , \end{aligned}$$where \(z_i\) are the variables describing the system, then the system is asymptotically stable at its equilibrium point if all the eigenvalues of the Jacobi matrix \(J=\frac{\partial h_i}{\partial z_i}\) fulfill the criterion \(|\mathrm{{arg}}(\mathrm{{eigen values}})|>\frac{q \pi }{2}\).
-
(ii)
Lyapunov Boundedness Theorem: Let V be a function satisfying the following properties:
-
(a)
all sublevel sets of V are bounded.
-
(b)
\(\dot{V(z)} \le 0 \forall z\). Then, all the trajectories are bounded, i.e., for each trajectory x there is an R, such that:
$$\begin{aligned} ||x(t)||\le R \forall t \ge 0. \end{aligned}$$Here, the function V is the Lyapunov function proving that the trajectories are bounded.
Problem Formulation
We consider two master systems.
Master system I:
where X is the state vector, \(A_1\) is the coefficient matrix corresponding to the linear part of the first master system, and \(F_1(X)\) is the remaining nonlinear part of the first master system.
Master system II:
where Y is the state vector, \(A_2\) is the coefficient matrix corresponding to the linear part of the second master system, and \(F_2(Y)\) is the remaining nonlinear part of the second master system. Next, we consider two slave systems.
Slave system I:
where Z is the state vector, \(B_1\) is the coefficient matrix corresponding to the linear part of the first slave system, \(G_1(Z)\) is the remaining nonlinear part of the first slave system, and U is the controller which is to be constructed.
Slave System II:
where W is the state vector, \(B_2\) is the coefficient matrix corresponding to the linear part of the second-slave system, \(G_2(W)\) is the remaining nonlinear part of the second-slave system, and V is the controller which is to be constructed.
Modified Fractional Matrix Hybrid Function Projective Difference Synchronization Scheme
We define the modified fractional matrix hybrid function projective difference synchronization error as:
where P is a non-constant, non-diagonal matrix.
Here, we choose the matrix P, such that the first co-ordinates get completely synchronized, the second co-ordinates get anti-synchronized, the third co-ordinates gets projectively synchronized, the fourth co-ordinates gets function projective anti-synchronized, the fifth and sixth co-ordinates are dislocated (disorderly)synchronized:
We design the controllers U and V as follows:
Substituting (8) into (7),the error dynamics simplifies to:
Modified Inverse Matrix Hybrid Function Projective Difference Synchronization Scheme
We define the modified inverse matrix hybrid function projective difference synchronization error as:
where P is a non-constant, non-diagonal matrix.
Here, we choose the matrix P, such that the first co-ordinates get completely synchronized, the second co-ordinates get anti-synchronized, the third co-ordinates get projectively synchronized, the fourth co-ordinates get function projective anti-synchronized [21, 22, 31], and the fifth and sixth co-ordinates are dislocated synchronized:
We design the controllers U and V as follows:
Substituting (12) into (11), the error dynamics simplifies to:
System Description
Complex Fractional Rikitake System
The first master system is taken as the complex Rikitake system of fractional order [19] given by:
Substituting:
Segregating the real and imaginary parts, we get:
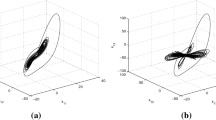
The system (13) exhibits chaotic attractor for parameter values a = 5, b = 2, initial conditions (\(-4,-0.7,2.5,0.7,2,0.77\)), and fractional order q = 0.987 (Fig. 1).
Complex Fractional El-Nino System
The second master system is chosen as the complex fractional-order El-Nino system [2] given by:
Substituting:
Segregating the real and imaginary parts, we get:
The system (14) displays chaotic attractor for parameter values \(\mu '=83.6, b'=10, c'=12\), initial conditions (5, 1, 3, 0.4, 4, 0.1), and fractional order q = 0.987.
Complex Fractional Generalized Lotka Volterra System-I
The first slave system is chosen as the complex fractional-order Generalized Lotka Volterra system [25, 30] given by:
Substituting:
Segregating the real and imaginary parts, we get:

Phase portraits of the complex fractional-order a Rikitake chaotic system, b El-Nino chaotic system, c G.L.V. system-I, and d G.L.V. system-II
The system (15) illustrates chaotic attractor for parameter values \(\bar{a}=5.1, \bar{b}=7.4, \bar{c}=20.8\), initial conditions (1.2, 0.112, 1.2, 0, 1.2, 0), and fractional order q = 0.987.
Complex Fractional Generalized Lotka Volterra System-II
The second-slave system is chosen as the complex fractional-order Generalized Lotka Volterra system given by:
Substituting:
Separating into real and imaginary parts, we obtain the system as:
The plots (16) show chaotic attractor for parameter vales \(A=2.9851, B=3, C=2\), initial conditions (1.2, 0, 1.2, 0, 1.2, 0.112), and fractional order q = 0.987.
Numerical Simulations and Discussion
We consider here the complex fractional Rikitake (13) (the Earth’s magnetic field system) and El-Nino system (14) (the weather system) as the drive system and the complex fractional Generalize Lotka Volterra systems (15) and (16) (the predator–prey system) as the slave systems. The numerical simulations are performed on the above models.
Modified Fractional Matrix Hybrid Function Projective Difference Synchronization Scheme
Taking the projective matrix:
The error from (5) can be described as:

Modified fractional matrix hybrid function projective difference synchronized trajectories and error plot
Then, the error dynamics is:
Note:
Now, choosing suitable controller gain matrix elements:
and designing controllers as in (8), we have the following:
Thus, the error dynamics simplifies to:
The eigenvalues of the error system (17) are \(-4,-4,-2,-2,-5,-5\) which satisfy the above stability condition (i), i.e., the argument of the obtained eigenvalues satisfies the condition \(|\mathrm{{arg}}(\mathrm{{eigen values}})|>\frac{q \pi }{2}\). Hence, the system is asymptotically stable about its equilibrium point. Also, the error converges to zero, implying that the modified fractional matrix hybrid function projective difference synchronization is achieved.
Simulation Results
The initial conditions of the complex fractional Rikitake system and complex fractional El-Nino system have been taken as (\(-4,-0.7,2.5,0.7,2,0.77\)) and (5, 1, 3, 0.4, 4, 0.1), respectively. Also, the initial conditions for the complex fractional G.L.V.-I and G.L.V.-II have been taken as (1.2, 0.112, 1.2, 0, 1, 2, 0) and (1.2, 0, 1.2, 0, 1.2, 0.112). Thereby, the initial conditions of the Modified Fractional Matrix Hybrid Function Projective Difference Synchronization Error are (\(9,-1.588,1,0,-0.67,1.888\)) for fractional order 0.987. Numerical simulations have been performed in MATLAB. The synchronized trajectories and the simultaneous error plot are displayed in Fig. 2.
Modified Inverse Matrix Hybrid Function Projective Difference Synchronization Scheme
Taking the projective matrix:
Here, P is an invertible matrix with its inverse as:
The error from (9) can be described as:

Modified inverse matrix hybrid function projective difference synchronized trajectories and error plot
Therefore, the error dynamics so obtained is:
Note:
Now, choosing suitable controller gain matrix elements:
and designing controllers as in (12), we have the following:
Thus, the error dynamics simplifies to:
We now consider the Lyapunov function:
Using the error dynamics as in (18), we obtain:
Therefore, by Lyapunov Boundedness Theorem, the error becomes bounded.
Simulation Results
The initial conditions for the complex fractional G.L.V.-I and G.L.V.-II have been taken as (1.2, 0.112, 1.2, 0, 1, 2, 0) and (1.2, 0, 1.2, 0, 1.2, 0.112). Also, the initial conditions of the complex fractional Rikitake system and complex fractional El-Nino system have been taken as (\(-4,-0.7,2.5,0.7,2,0.77\)) and (5, 1, 3, 0.4, 4, 0.1), respectively. Therefore, the initial conditions of the modified inverse matrix hybrid function projective difference synchronization error are (\(-9,-1.588,-0.5,0,-1.888,0.67\)) for fractional order 0.987. Numerical simulations have been performed in MATLAB. The synchronized trajectories and the simultaneous error plot are displayed in Fig. 3.
The main disadvantage of the obtained results is the complex nature of the controllers designed. Also in case of Inverse Matrix Hybrid Function Projective Difference Synchronization, the error could only be bounded. Therefore, in future, better controllers can be designed to make the error converge to zero.
Comparison with Previously Published Literature
In [4], Jinman He et al. have studied fractional matrix and inverse matrix projective synchronization between two systems of dimension four. For the case of fractional matrix projective synchronization, they have achieved the errors tending to zero, one at 1 unit and other at 5 units. In our study, while performing the modified fractional matrix hybrid function projective difference synchronization among four chaotic systems of dimension six, we have 4 errors tending to zero at 1 unit and two errors tending to zero at 2 units, respectively. This clearly indicates the efficacy of our designed controllers as on increasing the number of systems, and hence, the complexity the synchronization time is reduced.
The modified fractional inverse matrix hybrid function projective synchronization in our paper has been achieved using Lyapunov Boundedness Theorem, where the constant bounded behavior is achieved after 2 units, whereas in [4], the errors reach zero at 0.1, 1, 1.5, and 5 units, respectively.
Application in Secure Communication

a Original signal. b Transmitted signal. c Recovered signal. d Comparison of the signals
Chaos synchronization finds application in various science and engineering fields such as secure communication, control systems, etc. Many synchronization techniques have been developed to increase the diverseness in the possible synchronization schemes applicable. With the increasing cashless economy trend in the countries, the number of online purchases/transactions is increasing without bounds. Therefore, it is the demand of the hour to keep the communicated information safe, i.e., security of transmission of information is must to grow in this direction. The introduced techniques in this paper would strengthen secure communication manifolds as now all the components of the system are differently synchronized, and it is difficult for the hackers to predict the order and type of synchronization applicable to each component of the system.
It is based on the idea of hiding the information signal among the chaotic signals. Then, the original signals are recovered only after performed synchronization.
Illustration Let the information signal be \(r(t)=sin(4t)\). We mix it with the chaotic signals \(x_1(t)-y_1(t)\) and transmit. The recovered signal \(r_1(t)\) is obtained after performing the required synchronization. A comparison of the information signal and recovered signal is also displayed in Fig. 4.
Conclusions
In this paper, modified fractional and inverse matrices hybrid function projective difference synchronization theory has been developed and implemented on a study of bio-diversity. Here, synchronization has been achieved between complex fractional Rikitake system (model for earth’s magnetic field), El-Nino system (weather model), and Generalized Lotka Volterra system (biological predator-prey models). Particularly, the co-ordinates have undergone complete synchronization, anti-synchronization, projective synchronization, function projective anti-synchronization, and dislocated synchronization. These synchronizations methods increases the anti-attack capability in case of secure communications because of random existence of synchronization methods between the components of the system.
This study can also be extended to on systems interrupted by model uncertainties and external disturbances.
References
Butzer PL, Westphal U. An introduction to fractional calculus. In: Applications of fractional calculus in physics. World Scientific; 2000. p. 1–85.
Das S, Yadav VK. Stability analysis, chaos control of fractional order vallis and el-nino systems and their synchronization. IEEE/CAA J Autom Sin. 2017;4(1):114–24.
Dongmo ED, Ojo KS, Woafo P, Njah AN. Difference synchronization of identical and nonidentical chaotic and hyperchaotic systems of different orders using active backstepping design. J Comput Nonlinear Dyn. 2018;13(5):051005.
He J, Chen F, Lei T. Fractional matrix and inverse matrix projective synchronization methods for synchronizing the disturbed fractional-order hyperchaotic system. Math Methods Appl Sci. 2018;41(16):6907–20.
Hilfer R. Applications of fractional calculus in physics. In: Hilfer R, editor. Applications of fractional calculus in physics. World Scientific Publishing Co. Pte. Ltd.; 2000. ISBN# 9789812817747.
Jahanzaib LS, Trikha P, Baleanu D. Analysis and application using quad compound combination anti-synchronization on novel fractional-order chaotic system. Arab J Sci Eng. 2020;45:1–14
Khan A, Jahanzaib LS, Trikha P. Analysis of a novel 3-d fractional order chaotic system. In: international conference on power electronics, control and automation (ICPECA). IEEE 2019;1–6
Khan A, Jahanzaib LS, Trikha P. Changing dynamics of the first, second and third approximations of the exponential chaotic system and their application in secure communication using synchronization. Int J Appl Comput Math. 2020;7(1):1–26.
Khan A, Jahanzaib LS, Trikha P. Fractional inverse matrix projective combination synchronization with application in secure communication. In: Proceedings of international conference on artificial intelligence and applications. Springer; 2020. p. 93–101.
Khan A, Jahanzaib LS, Trikha P. Secure communication: using parallel synchronization technique on novel fractional order chaotic system. IFAC-Pap OnLine. 2020;53(1):307–12.
Khan A, Jahanzaib LS, Trikha P, Khan T. Changing dynamics of the first, second and third approximates of the exponential chaotic system and their synchronization. J Vib Test Syst Dyn. 2020;4(4):337–61.
Khan A, Trikha P. Compound difference anti-synchronization between chaotic systems of integer and fractional order. SN Appl Sci. 2019;1:1–13.
Khan A, Trikha P. Study of earth-changing polarity using compound difference synchronization. GEM Int J Geomath. 2020;11(1):7.
Khan A, Trikha P, Jahanzaib LS. Secure communication: Using synchronization on a novel fractional order chaotic system. In: 2019 international conference on power electronics, control and automation (ICPECA). IEEE; 2019. p. 1–5.
Khan A, Trikha P, Jahanzaib LS. Dislocated hybrid synchronization via. tracking control and parameter estimation methods with application. Int J Model Simul. 2020;40:1–11.
Luo AC. A theory for synchronization of dynamical systems. Commun Nonlinear Sci Numer Simul. 2009;14(5):1901–51.
Mahmoud EE, Jahanzaib LS, Trikha P, Alkinani MH. Anti-synchronized quad-compound combination among parallel systems of fractional chaotic system with application. Alex Eng J. 2020;59:4183-4200
Mahmoud EE, Trikha P, Jahanzaib LS, Almaghrabi OA. Dynamical analysis and chaos control of the fractional chaotic ecological model. Chaos Solitons Fractals. 2020;141:110348.
McMillen T. The shape and dynamics of the rikitake attractor. Nonlinear J. 1999;1:1–10.
Ojo KS, Ogunjo ST, Fuwape IA. Modified hybrid combination synchronization of chaotic fractional order systems. 2018. arXiv preprint arXiv:1809.09576.
Ouannas A, Grassi G, Wang X, Ziar T, Pham VT. Function-based hybrid synchronization types and their coexistence in non-identical fractional-order chaotic systems. Adv Differ Equ. 2018;2018(1):309.
Ouannas A, Wang X, Pham VT, Ziar T. Dynamic analysis of complex synchronization schemes between integer order and fractional order chaotic systems with different dimensions. Complexity. 2017;2017.
Pecora LM, Carroll TL. Synchronization in chaotic systems. Phys Rev Lett. 1990;64:821–4.
Podlubny I. Fractional differential equations: an introduction to fractional derivatives, fractional differential equations, to methods of their solution and some of their applications, vol. 198. Elsevier; 1998.
Previte JP, Paullet JE, English E, Walls Z. A Lotka–Volterra three species food chain. Math Mag. 2001;75:243–55.
Tavassoli MH, Tavassoli A, Rahimi MO. The geometric and physical interpretation of fractional order derivatives of polynomial functions. Differ Geom Dyn Syst. 2013;15:93–104.
Trikha P, Jahanzaib LS. Dynamical analysis of a novel 4-d hyper-chaotic system with one non-hyperbolic equilibrium point and application in secure communication. Int J Syst Dyn Appl (IJSDA). 2020;9(4):74–99.
Trikha P, Jahanzaib LS. Dynamical analysis of a novel 5-d hyper-chaotic system with no equilibrium point and its application in secure communication. Differ. Geom. Dyn. Syst. 2020;22.
Trikha P, Jahanzaib LS. Secure communication: using double compound-combination hybrid synchronization. In: Proceedings of international conference on artificial intelligence and applications. Springer; 2020. p. 81–91.
Vaidyanathan S. Anti-synchronization of the generalized Lotka–Volterra three-species biological systems via adaptive control. Int J PharmTech Res. 2015;8(8):141–56.
Wei Q, Wang X, Hu X. Hybrid function projective synchronization in complex dynamical networks. AIP Adv. 2014;4(2):027128.
Yadav VK, Srikanth N, Das S. Dual function projective synchronization of fractional order complex chaotic systems. Opt Int J Light Electron Opt. 2016;127(22):10527–38.
Zhang H, Liu D, Wang Z. Controlling chaos: suppression, synchronization and chaotification. Berlin: Springer Science & Business Media; 2009.
Zhang Q, Xiao J, Zhang XQ, Cao D. Dual projective synchronization between integer-order and fractional-order chaotic systems. Opt Int J Light Electron Opt. 2017;141:90–8.
Acknowledgements
The second author is funded by the Senior Research Fellowship of the Council of Scientific and Industrial Research,India HRDG (CSIR) sanction letter no. 09/466(0189)/2017-EMR-I.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
On behalf of all authors, the corresponding author states that there is no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Khan, A., Trikha, P. & Khan, T. Secure Communication Using Modified Fractional and Inverse Matrices Synchronization Methods. SN COMPUT. SCI. 2, 91 (2021). https://doi.org/10.1007/s42979-021-00481-3
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s42979-021-00481-3