
Abstract
Increased adoption of the electric vehicle (EV) needs the proper charging infrastructure integrated with suitable energy management schemes. However, the available literature on this topic lacks in providing a comparative survey on different aspects of this field to properly guide the people interested in this area. To mitigate this gap, this research survey is an effort to provide know-how about the important aspects of the overall EV charging setup with 239 relevant references. It reviews the achievements of energy management systems in terms of improving fuel consumption efficiency and reducing carbon dioxide emissions in EV charging systems. State-of-the-art and most up-to-date standards of EV technology and charging infrastructure are presented. EV charging schemes based on standard grid and renewable energy resources are introduced with a brief comparison of the standard grid and photovoltaic-grid charging systems. Moreover, this article describes centralized and decentralized control configurations of EV charging. A comparative survey of different energy management algorithms is presented while highlighting the benefits and drawbacks of each algorithm. The work presented in this review will help frame future research needs. It is anticipated that the material gathered in this article will become a valuable source of information for the researchers working on this area of study.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Electric vehicle (EV) technology is gaining more attention due to its superior efficiency, lower maintenance, and eco-friendly nature [1]. More than 60% of the major global energy demand is accounted for by the transportation sector and electricity generation [2]. Environmental issues have grown as a result of growing air pollution and greenhouse gas (GHG) emissions. Organizations in the transportation sector are working to integrate EVs into modern power grids to maintain a clean energy perspective [3]. The development and use of EVs on a large scale can result in a major reduction in oil use, GHG emissions, and fossil fuel consumption [4, 5]. Despite these benefits, lack of charging infrastructure, long charging periods, mileage anxiety, existing battery technology, and behavior of internal combustion engine vehicle (ICEV) users may limit the applicability of EVs [6]. So, EV charging stations must have reliable, efficient, and cost-effective infrastructure to compete with the existing oil filling stations [7]. Currently, a driving range of more than 321 km has been achieved using advanced technology, and EV chargers with a power rating of more than 350 kW can recharge EVs in less than 10 min [8].
Compared with ICEVs, EVs have less impact on the environment and health because these do not directly release any pollutants or emissions [9]. The largest contributors to tail-pipe emissions are nitrogen oxides (NOx) and particulate matter (PM) [10]. From the well-to-wheel perspective, the use of battery EVs (BEVs) reduces PM by four times and NOx by twenty times [11]. As a result, EVs help protect public health and prevent climate change [12] and can play a significant role in the development of smart cities [13].
With the growing adoption of EVs, it is imperative to establish charging stations with smart energy management schemes (EMSs) to meet the EV user’s requirements [14]. The main purpose of any scheme should be defining the power delivery sequences for each source of the system to achieve required EV charging objectives under the defined limitations [15].
Over the years, numerous schemes were proposed to control EV charging stations to achieve various objectives other than charging. In general, the main objectives considered in the existing scheme are: charging EVs with cheaper electricity prices, reducing grid burden during system operation, and earning maximum profit from charging stations. Based on different objectives, the charging scheme may be suitable for certain purposes but not for others. For instance, some of the schemes yield better performance in terms of reducing the grid burden but fail to resolve the need for interruption-less charging. The importance of energy storage facilities, which result from the broad use of electric vehicles, is becoming more significant. Nevertheless, the energy that is stored in electric vehicles is intrinsically distributed. Vehicle-to-everything (V2X) functionality enables to access this distributed energy storage, providing a range of utilities to the system [16]. Electrical connections and operational modes are both included in V2X technology, which is categorized as vehicle-to-grid (V2G), vehicle-to-vehicle (V2V), vehicle-to-home (V2H), vehicle-to-load (V2L), vehicle-to-building (V2B), and vehicle-4-grid (V4G) [17]. Similarly, some can provide cheaper charging but at the expense of EV participation in vehicle-to-grid (V2G) or vehicle-to-vehicle operations which causes fast degradation of batteries [18].
V2G is the utilization of energy and power derived from plug-in electric vehicles to offer services to organizations responsible for managing the electrical grid. These organizations include distribution utilities, electrical system operators, integrated load-serving entities, capacity planners, and other grid managers [19]. When comparing the V2B and V2H methods of operation, it is evident that V2G offers a more extensive range of services. The aggregator has an essential function in monitoring the load profile and maximizing the efficiency of charging and discharging of electric vehicles in V2G systems [20]. The aggregator performs two functions as an interface between the electric vehicles and electric grid. First and foremost, electric vehicle operators must establish a connection with the aggregator and furnish all the requisite data for each EV. The aggregator determines whether an electric vehicle should be completely charged prior to being unplugged by analysing this data [21]. During the second phase, the aggregator establishes a connection with the grid to identify the specific services offered by the EVs and the precise amount of power that has to be transmitted to or received from the grid [22]. Smart buildings have the ability to conserve energy and transfer it to nearby devices and low-voltage networks through the use of energy-efficient technologies [23]. The V2G mode of operation for EVs offers a range of services, such as providing backup power in case of failure of renewable energy sources, actively regulating power, reducing peak power demand, filling in low-demand periods, supporting reactive power, compensating for harmonics in grid current, and providing additional services such as frequency and voltage regulation [24].
Vehicle-to-Building (V2B) functions on a large-scale and has the capability to combine a whole fleet or utilize a small number of electric vehicles to enhance the energy efficiency of a building or site, such as a mini-grid. The benefits of V2B are particularly prominent as it focuses on industrial and commercial buildings, creating additional opportunities compared to V2H [25]. Industrial and Commercial consumers pay significantly higher capacity-charges, along with additional charges for line phase imbalances caused by inductive loads, which result in surge-power losses into line. V2B economics relies on the utilization of commercial as well as industrial rate tariffs, which encompass both the cost of overall energy consumption and the cost associated with the peak demand during the billing period [26]. The primary objective of V2B technology is to reduce peak load, thereby minimizing the substantial billing cost. The capacity costs, often referred to as demand charges, can account for over half of the monthly electricity bill for commercial or industrial buildings. These expenses are incurred due to occasional surges in the building's electrical load [27]. Hence, any V2B technology that has the potential to reduce those peaks by a marginal kW can result in substantial cost savings. Integration of V2B technology can provide supplementary benefits such as decreasing operating expenses, reducing carbon emissions and deferring development expenditures [17].
This paper presents a strategic review of EMSs for the standard grid and PV-grid EV charging systems. However, before presenting this review, the background of EVs and the approaches of their charging control are given. Followed by this, the comparison between the two above-mentioned charging systems is presented to select the suitable one for day-time charging in an office parking space. Considering the most favorable for the interests of EV users (office employees), the aggregator-based charging schemes are the focus of this research; especially employed in PV-grid systems. Moreover, the algorithms used for developing the schemes are explored and compared. Lastly, the various system sizing methods are reviewed. The sizing method is used to determine the least boundaries (that is minimum size) of the system at which it can be operated without facing economic losses while achieving certain objectives without failure.
Thus, this review would be useful for the reader who requires a comprehensive background of EMSs being used for EV charging, as well as to keep track of the latest development in this area. The ultimate and primary purpose of the literature review is to identify technical gaps in the existing EV charging schemes and to perform subsequent research so that this gap can be overhauled.
1.1 Background of electric vehicles
EVs can be defined as vehicles that get some or all of their propulsion energy from batteries [28]. A battery is combined with an ultracapacitor in the hybrid energy storage system (ESS) to increase the driving range of EVs [29]. EVs are growing in popularity as an alternative to conventional ICEVs [30, 31]. Naturally, this adoption is resulting in a huge reduction in the consumption of fossil fuels. Based on the share of propulsion energy drawn from the battery, EVs can be classified as (i) purely BEVs, (ii) hybrid EVs (HEVs), and (iii) plug-in hybrid EVs (PHEVs). Table 1 presents the characteristics of these EVs in brief [32].
BEVs are fully powered by a large onboard battery. The use of energy in this vehicle is much more efficient than ICEVs. The ICEVs typically have an efficiency of 15.0–18.0%, but the BEV can have a fuel efficiency of 60.0–70.0%. It has provision for the plug-in to the external socket. The HEV's powertrain is a combination of electric and gasoline fuel. It has a much smaller battery that provides energy to the engine, thus optimizing the operational efficiency and performance of the combustion engine. It has no electric socket outlet for charging, that is it cannot be charged through the external power source. Its battery is charged either by the engine or by kinetic braking energy captured (regenerative braking). PHEVs seem to be similar to HEVs in concept but with larger battery storage and provision of charging from the utility grid. This makes it feasible for the vehicle to go a considerable distance in all-electric mode and allows faster battery charging.
In this research, the scope is limited to BEVs and PHEVs, as both are capable of being charged from an external power source.
2 EV Battery and charging power levels
A battery can be classified either as primary (non-rechargeable) or secondary (rechargeable) [33]. The primary type is of no concern for EVs, whereas the evolution of secondary battery technology matters for EVs. It started with Lead Acid, then moves on to Nickel-based, and eventually to Lithium-based [34]. Lithium-ion batteries are used because of their high efficiency and power density, extended life, and environmental benefits [35, 36]. Driving range per charge is a crucial EV characteristic that is directly connected to the power density and weight ratio of the lithium-ion battery storage system to the entire vehicle. Many countries have set goals to design lithium-ion battery systems with high power density as energy density is most important factor for attaining a long driving range of EVs. For example, in China, the goal for energy density is 350.0 Wh/kg for cell and 250.0 Wh/kg for battery bank, while the mileage of EVs will be 400 km on a single charge [37]. Many efforts are going on to produce high-capacity anode and cathode materials for the lithium-ion battery system to meet the stated energy density requirements [38,39,40,41]. Digital twinning of battery systems is also foreseen by integrating communication and artificial intelligence (AI) techniques to enhance safety, working, and economy in transportation systems [42]. The characteristics of the widely used Lithium batteries for EVs are shown in Table 2 [32, 43]. The state of charge (SOC) for some models with level 3 DC fast charging (DCFC) is also given.
The vehicle charging can be carried out at the home garage on a standard household socket during the night-time using the standard grid connection [43]. For this purpose, level 1 charging is provided through a 120 Vac plug. Level 2 charging, which requires a 240 Vac plug, is commonly defined as the primary charging method for public and private facilities. For levels 1 and 2 charging, generally, single-phase solutions are utilized. The level 3 charging utilizes the three-phase or DC power supply for fast EV charging. The fast-charging platforms that work like filling stations are suitable for commercial and public applications. Table 3 summarizes these charging levels and charger types [43,44,45].
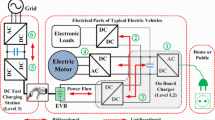
The electrical components utilized in three charging levels (1, 2, and 3) of EVs are shown in Fig. 1. All these charging levels take AC power from the utility power grid and convert it into the appropriate voltage levels required for the charging. In the application of EV charging, the level 1, and 2 charging systems are integrated within EVs. On the other hand, in the level 3 charging system, the charging operations are split between EV charging stations and on-board chargers for EVs. In these EVs, unidirectional and bidirectional isolated or non-isolated converter topologies are generally utilized. Level (1 and 2) charging systems are powered by a single or three-phase AC source, whereas level 3 charging systems are powered by a three-phase AC source, which has the same functions as level 1 and level 2 charging systems, but at a higher power level. The control algorithm that each of the three charging levels uses is represented by the power control unit. The power control unit includes PID controllers, PI controllers, fuzzy logic controllers, neural networks, and adaptive sliding mode controllers [43].

Electrical components utilized in three charging levels (1, 2, and 3) of electric vehicles
2.1 EV Battery chargers
EV chargers are divided into primarily two types: (i) on-board chargers, (ii) off-board chargers. Because of space, cost, and weight constraints, the rated power of traditional vehicle chargers is limited [46]. The two types of EV charging methods that have been studied so far are constant voltage (CV) and constant current (CC). The most optimal and best way for rapid EV charging is the combination of CC and CV modes that combine the favorable results of both methods. But, the anticipated rise in the number of EVs [8] may lead to a significant load increase on the national power grid, because of charging of EV batteries. On the other hand, during peak load demand, EVs with battery storage can also help the utility system by injecting energy in to the power grid while working in the V2G mode [47].
The conventional on-board charger limits the high power because of cost, size and weight constraints and it is typically employed for level 1 and level 2 charging. On the other hand, the latter is less constrained by weight and size, so it can easily be used for level 3 charging to increase the autonomy of charging [48]. Thus, the DC fast charger (level 3) is considered to be the most suitable charging platform; thus, many developed countries are in favor of using this charger [49]. In addition, a level 3 charger can be used for uni-directional power flow or bi-directional power flow. However, unidirectional charging is a logical and suitable first step that decreases battery degradation while limiting hardware needs and simplifying interconnection issues [43]. Bidirectional chargers support charging from the national utility grid and injecting battery storage energy back into grid which is a V2G arrangement [50].
The design of ad-hoc microgrids has been encouraged by the development of DC fast chargers for electric vehicle batteries (EVBs). In these microgrids, the electrical architecture of microgrid can be made lighter and more efficient by substituting a solid-state transformer (SST) for a low-frequency service transformer [51]. In the field of electric vehicle (EV) charging stations, advancements in power electronics technology are critical as they addresses important issues including environmental concerns, sustainability and charging efficiency. The importance of Solid State Transformer (SST) technology is emphasised in the research study [52]. SST considered the most advanced option for adjusting to changes in electrical network architectures because it incorporates advanced and sophisticated power electronics and allows two independent electrical grids to be connected through isolation. Its broad application in offshore wind farms, railways, data centres and smart grids demonstrates its bright future. In addition to providing V2G functionality, a solution based on SSTs could be designed to provide either unidirectional or bidirectional power flow, which better manages the active and reactive power. Furthermore, it has protection characteristics like fault current limiting and isolation in addition to performing power factor correction function. In order to ensure fewer conversion stages and higher efficiency, the EV charging station based on solid state transformer features a common DC bus to create an interface among renewable energy sources, battery energy storage systems, and EVs using DC/DC converters [53].
The most famous chargers used for DCFC are the Tesla-S supercharger, SAE J1772 Combo and IEC CHAdeMO [43, 54]. Tesla has a total of 1431 supercharging stations around the world, including 294 in the Asia–Pacific region, 442 in Europe and 694 in North America [55]. Canadian Automobile Association announced that 7906 charging stations had been developed/constructed in major Canadian cities with the help of another charging infrastructure provider, Charge Hub [56]. The Japanese protocol famous as CHAdeMO has gained international recognition. This DC fast charger is conductive and capable of charging up to 200.0 A at 50 kilowatt. The CHAdeMO connector is used by several currently available EVs that are capable of accepting DCFC, such as the Mitsubishi i-MiEV and Nissan Leaf. A controller area network protocol is used to establish secure communication between the charger control units and EV management system. Society of Automotive Engineers (SAE) has developed a “hybrid connector” that is standard for fast-charging which attaches DC power contact pins of high-voltage to J1772 connector, allowing the same receptacle to be used for all charging levels. Therefore, SAE J1772 Combo 1 and 2 defines the electrical, physical, and functional standards to supports AC levels (1, 2, and 3) and DCFC. Combo 1 (IEC Type 1) is widely used in United States, while Combo 2 (IEC Type 2) is more often used in the Europe. The Tesla supercharger (135 kilowatt) is a specialized DC fast charging station for the Tesla-S Series (Tesla-X vehicle and All Wheel Drive (AWD)). Tesla is the only organization that has installed it after standardization.
2.2 EV Charging and grid integration standards
The development of EVs has created new aspects for the transportation and power industries. All facets of this new technology need to be standardised in order to operate consistently on a global basis. Table 4 includes the global regulatory agencies and established standards that are responsible for overseeing various aspects of EVs. Electric vehicle charging standardization is divided into three categories: EV grid integration standards, EV safety standards as well as EV charging component standards. In the standardization organization for EV, International Organization for Standardization (ISO) is committed to the overall standardization of EVs, and other organizations are committed to component-level specifications.
Electric vehicle charging and discharging with the utility grid is covered under the grid integration standard. EVs operate like distributed energy resources (DERs) during charging and discharging from the utility grid. Therefore, the grid connection standard of DERs is also applicable to EV grid integration. Underwriters Laboratories and Institute of Electrical and Electronics Engineers (IEEE) are the two key stakeholders in grid interconnection standards. On the other hand, organizations like the National Electric Code and the National Fire Protection Association focus primarily on safety measures.
3 Electric vehicle charging infrastructure and control
3.1 Power infrastructure in EV charging station
Power infrastructure in the EV charging station is classified in accordance with type of power used, physical contacts, and the direction of power flow. The classification of Power infrastructure in the EV charging station is shown in Fig. 2.

Classification of power infrastructure in the electric vehicle charging station
3.1.1 Types of power used
EV charging can be done with either AC or DC power. According to the power system of the country, AC charging stations have different frequencies and voltage levels. According to the voltage level, AC charging stations are divided into three voltage levels (level 1, level 2 & level 3). In all three levels, level 3 has maximum charging voltage. Charging stations (level 1 and 2) may be installed on private places. However, the installation of charging stations (level 3) requires separate electrical transformers and wiring; and also require permission from national power supply companies. Level 3 stations are generally installed as public charging stations. At the same voltage level, the DC charging method has a higher charging power capacity and a faster charging speed [63]. EVs are fully charged in 20 min by using modern DCFC technology [55, 64].
3.1.2 Physical contact
The charging infrastructure is classified into two types based on physical contact: (i) conductive charging and (ii) contactless charging. Conductive charging systems keep physical contact between vehicle battery and source of power, while contactless charging systems transmit the power without requiring any physical contact [43]. Contactless charging systems usually use wireless power transfer (WPT) systems to charge EV batteries. WPT systems can operate on each voltage level (1, 2 & 3) with a rated power up to 20.0 kilowatt. Up to 90% efficiency has been achieved [65]. A detailed review of WPT is presented in [66].
3.1.3 Direction of power flow
The uni-directional charger is easy to control due to its low simplicity. When compared with the bidirectional charger, the unidirectional charger minimizes battery degradation and reduces interconnection problems [67]. The bidirectional EV charger has DC-DC converters and grid-connected AC-DC converters [68]. Figure 3 shows the concept of power flow for bi-directional and uni-directional EV charging schemes [61, 69, 70].

Uni-directional and bi-directional EV charging schemes
3.2 Centralized and decentralized EV charging control
Centralized control also called direct control relies on an aggregator (charging station owner) which is directly responsible for all EV charging within the assigned zone. The aggregator can also manage other units, like the charging post manager, which manages a group of EVs within a parking lot. Under this kind of control structure, the autonomy of EV users is sacrificed. The primary concept underlying centralised charging is the central processing and collection of data from EVs through a centralised framework. Due to central data processing, centralized control provides the global optimum solution that accounts for all grid and user constraints [71,72,73,74,75]. Rates and scheduling of EV charging are decided by the main control engine. The limitation of centralized charging of EVs is that the scale of the optimization problem increases with number of the EVs in a specific area increases. This issue is resolved by developing a hierarchical based control architecture that divides EV loads into multiple groups based on their locations. The central controller mainly manages the load demands of each group, while each group manages power distribution to individual EVs using a local controller [76,77,78,79,80,81,82]. The centralized EV charging control is shown in Fig. 4.

Centralized control architecture for electric vehicle charging systems
On the other hand, in decentralized control (also called local or indirect control), the decision-making power is in each EV user rather than in external entities such as aggregators. In this approach, each user autonomously considers the desired charging preferences without providing any private or sensitive information to external entities. Therefore, EV charging can be realized by centralized or decentralized control [83, 84]. The key elements influencing the charge decision in this sort of control are the price of electricity and the convenience of the user [85]. Table 5 summarizes the characteristics of both approaches [48, 86]. The decentralized EV charging control is shown in Fig. 5.

Decentralized control architecture for electric vehicle charging systems
Due to the simplicity of the communication network, the authors in [87] suggested that decentralized charging is a more promising approach than centralized external control. The decentralized approach, not only preserves the privacy of sensitive information but also maintains the EV user autonomy by ensuring any-time charging. Due to these benefits, it is more likely to be acceptable to users than a centralized approach. But on the other hand, decentralized control can increase the maximum aggregate demand from the grid, especially with fast charging [88].
4 Electric vehicles charging systems
The EV charging system is an infrastructure that provides electrical energy for recharging. The capacity and location of such systems depend on various factors such as EV users, distribution network, and availability of generation resources [89,90,91,92]. In recent literature, the most discussed charging systems are standard grid and grid-connected renewable energy (RE) systems [15]. In the standard grid, EV charging is solely accomplished by the national utility grid [32]. On the other hand, in the case of RE-grid systems, charging can be done through the utility grid as well as RE sources. The grid-connected RE sources used for EV charging mainly include solar PV, wind, and biomass [15, 54]. However, the literature on PV systems for EV charging is far more sophisticated and varied, as it has additional technical advantages compared to windmills and biomass plants such as low maintenance and long unattended periods of operation [18, 54, 93].
4.1 Standard grid charging system
Direct charging using the standard grid is widely used because of its simplicity and availability of an unlimited energy supply. EV users may easily access charging points because the charger only needs a standard power outlet [43]. The impact of grid-connected EVs can be divided into negative and positive impacts. Excessive integration of EVs into distribution systems will affect load distribution profile, voltage and frequency imbalance, power losses, distribution system component capacity, excessive harmonic injection, and distribution grid stability [94,95,96,97,98]. Although excessive penetration of EVs in the power grid can cause issues like higher peak load demand, deterioration of power quality, and the power regulation problem. All of these problems are solved and managed by using advanced power management technologies. The positive effects of EV integration on the utility grid include power management, improvement in power quality, regulation supervision, and RE support [98,99,100,101,102,103].
The standard grid system needs a simple EMS for EV charging compared to the schemes designed for complex grid-connected RE systems. In grid charging, the battery of the EVs can be recharged with the help of various approaches namely: simple, delayed, and night-time [104,105,106]. In a simple approach, EVs immediately start recharging once connected to the standard grid. The delayed charging approach shifts the process of charging by a fixed duration of time, such as five hours. Night-time approaches delay the charging process over the course of the night when the prices of grid electricity are at their lowest.
The delayed and night-time charging approaches are not suitable for day-time charging in office parking because EV users may lose the autonomy of charging during working hours. On the other hand, the simple charging approach can cause grid overloading; this results in distribution losses, voltage variation, and degradation in power quality [104]. The overloading problem becomes more crucial during the day-time when power demand is highest. Thus, also the simple approach is not suitable for day-time charging in office parking. However, the grid burden can be released during the charging process, if the RE source is integrated with the standard grid system [107]. The grid-connected RE sources used for EV charging mainly include solar PV, wind, and biomass [28, 54]. Nevertheless, the PV system has some additional technical advantages compared to windmills and biomass plants such as requirements for low maintenance and long unattended periods of operation [18, 54].
4.2 Grid-connected RE-based EV charging systems
The utility grid will undoubtedly be overloaded since the number of EVs is expected to expand quickly. Integrating RE systems into the utility grid is one alternative strategy to alleviate this issue[108] [109,110,111,112,113,114]. Solar PV, wind, biomass, and hybrid energy generation systems are all viable options that could be considered for this aim [115,116,117,118,119]. The long-term impacts of using large-scale wind energy to meet the increasing energy demand caused by EV charging have been examined in many studies [120]. Wind energy-based EV charging stations can operate in off-grid mode [121] and on-grid mode [122]. But, it should be noted that the wind energy generation system needs a suitable optimal location and a wide space to install the windmill [123]. The issue is significant in urban regions, where high buildings are major obstacles in wind paths. Furthermore, the wide variations in wind speed make it less suitable for EV charging as compared to other RE systems [124].
Biomass energy differs from wind energy in that it can be easily stored and used when necessary [125] [126]. However liquid biofuels are considered to be an alternative option for EV fuel [127]. For EV charging stations, bioelectricity offers a number of benefits [128]. Bioenergy could be produced with numerous materials of biomass feedstock such as agricultural and forestry residues, animal waste, whole tree harvesting, and woody energy crops [129,130,131,132]. Bioelectricity has higher energy returns than biofuel processes from a financial perspective. Many recent research articles have been published to investigate the potential application of biomass energy in electric transportation [133]. A 20 kW EV charging station has been designed and installed using biogas [128]. Despite these benefits, the polluted environment originated due to the production of bioelectricity makes it unsuitable for areas with high population density.
The research on the use of solar photovoltaic (PV) energy for EV charging is more developed and wide-ranging. Solar (PV) system is more flexible in terms of integrating with existing utility grids [93]. Several researchers have worked on PV-based EV charging stations [134,135,136,137,138]. Photovoltaic-based electric vehicle charging stations are divided into two primary categories: photovoltaic grid-connected charging and photovoltaic standalone charging [139,140,141]. Additionally, electric vehicle charging stations can be divided into two groups based on how long it takes to charge an electric vehicle: charging while vehicle parked and charging while driving [142, 143]. In photovoltaic grid-connected charging, if photovoltaic power generation is insufficient or inaccessible, the electric vehicle is charged from the utility grid. The photovoltaic grid-connected charging system is appropriate for work area parking lots [144, 145]. Another method to harness photovoltaic power is photovoltaic standalone charging system, which can be deployed in three ways: vehicle-integrated photovoltaic (VIPV), solar roofs and solar carports [146,147,148]. For electric vehicles to be charged from photovoltaic, the total energy needed to operate or drive the electric vehicle must not exceed the total energy produced by the photovoltaic modules installed in charging station [149]. In vehicle-integrated photovoltaic charging systems [150,151,152], photovoltaic modules are mounted on the body frame of electric vehicles. Electric vehicles can be charged while in motion by utilising the VIPV charging technology. In recent times, the Ford C-Max Solar Energy Concept Car 2014 employed the vehicle-integrated photovoltaic design. The C-Max Solar Energy Hybrid, a Ford concept automobile with roof-mounted PV modules, can generate between 300 and 350 Wp of power from an array that occupies around 1.6 square metres of the roof. Workplace plug-in charges the vehicle battery early in the day, causing significant daily solar radiation loss under standard commuting transit patterns. This effect is worst for drivers who charge at work and home, as well as utilize Level 2 charging in the workplace instead of Level 1. In this scenario, almost 80% of the total solar energy is not captured by the system [153].
Reference [154] proposed a high power electric vehicle charging station using solar (PV) powered bi-directional chargers. However, the proposed system cannot allow AC charging. For the EV charging station, reference [155] recommended using integrated PV modules with multi-port converters. However, the grid current is severely distorted. A photovoltaic powered grid-connected EV charger through a Z-source converter is described in Reference [156]. Although the performance of the charger is better, this is not suitable for standalone operation. Reference [157] discusses the hybrid optimal management of the storage system of the photovoltaic powered EV station. Reference [158] optimizes the physical scheduling of EV charging stations.
One of the most fundamental concepts is to promptly charge electric vehicles (EVs) using the principle of "charging-while-parking," in contrast to the more prevalent "charging-by-stopping" [159, 160]. This provides opportunity to exploit solar (PV) system by installing them on the roof of parking lot [161] [162,163,164]. The use of standalone charging stations is an effective way to help the power grid [165]. Therefore, EVs can be efficiently and quickly charged through an integrated PV grid system, while EVs owners are participating in other kinds of activities [143]. The PV powered charging stations have various advantages [91, 166]. Considering that the charging is done during the day, when load demand and energy prices are at their highest, the cost reductions are substantial [167]. Furthermore, rooftop parking areas provide free rain and sun shelter which is advantageous in nations having warm climates. Due to these benefits, PV grid-connected systems are more efficient and popular than other RE generation systems (wind and biomass etc.). A PV-powered grid connected EV charging system is shown in Fig. 6.

Photovoltaic-powered grid-connected EV charging system
A. R. Bhatti et. al. [168] presented a case-study on EV charging utilising the conventional utility power grid, grid-connected PV system, and a stand-alone PV system in the presence of the ESS. The research study concluded that PV grid systems are more profitable and economical than standard grid charging systems and PV standalone systems. Furthermore, M. Honarmand et. al. [169] analyzes the large-scale deployment of EV chargers, where PV-powered carports are installed in large car parks in a mid-sized Swiss city. The authors found that 14.0–50.0% of city's mass transit energy needs can be supplied by PV energy. However, some suggestions for PV-powered EV charging facilities are discussed in [170,171,172].
4.3 Comparison between standard grid and PV-grid charging systems
To quickly evaluate the features of the standard grid and PV-grid charging systems, a comparison between these two systems is provided in Table 6.
From the above discussion, it is concluded that a PV grid system can provide a more feasible solution for the day-time charging of EVs in office parking spaces than a standard utility grid system [173]. However, in order to use hybrid power sources effectively, an intelligent as well as effective EMS is required.
5 Energy management scheme
5.1 EMS for electric vehicle charging systems
The deployment of an EMS is very crucial for the optimization of available energy from various sources linked to the charging system [174, 175]. In the context of EV charging, optimization is defined as a method or process that supplies charging power demand consistently over time without violating the constraints under consideration [176]. Without proper energy management (EM), the grid can be overloaded and EV users may have to bear a high cost for day-time charging. On the other hand, proper EM not only reduces the grid burden but also facilitates EV users with a low charging price. Additionally, other requirements of the users (for example quicker charging, uninterrupted charging) can also be realized, without incurring the system's economic losses, by properly defining the rules of energy utilization.
Based on the requirements of users and from the perspective of the distribution networks [177], an EV can be considered as a simple load, flexible load, or distributed and mobile storage element [48, 178]. The simple load can be handled by the uncoordinated scheme. However, the flexible and mobile storage element can be controlled via valley-filling and peak-shaving smart schemes respectively [48]. In valley-filling, charging takes place during utility grid off-peak hours, whereas, in peak-shaving, the V2G operation supports the grid during peak conditions [24]. Thus, in a broader sense, the charging can be realized by uncoordinated or smart EMSs.
5.1.1 Uncoordinated charging scheme
The uncoordinated/simple scheme describes the uncontrolled behavior of charging without considering proper EM where it is expected of all customers to charge their electric vehicles as soon as they reach charging station [48, 179, 180]. Among all EV charging schemes, this one is considered to become the most expensive and may have the highest impact on the electric grid [181, 182]. Moreover, the literature indicates that uncoordinated charging of a large number of EVs will cause some distribution network issues. The issues are related to network congestion, peak power problems, grid overloading, voltage drops, and power losses [183]. During peak hours, uncoordinated EV charging can increase the power demand by up to 5% [184]. Thus, the uncoordinated scheme is not recommended to apply for the day-time charging operation. Nevertheless, the uncoordinated scheme is used as a base case to benchmark the performance of newly proposed smart EMSs [32, 115, 185].
5.1.2 Smart energy management schemes for EV charging
Smart EMSs for standard grid [82, 85, 176, 185,186,187,188,189,190] and PV-grid [32, 115, 169, 191,192,193,194,195,196,197] EV charging systems have been proposed by various researchers. These schemes allow the stakeholders e.g. EV users, aggregators, and distribution system operators (DSOs) to achieve technical and economic benefits [169]. The charging profiles should be scheduled by the DSO to avoid grid congestion issues [48, 198]. Based on the interests of stakeholders, smart EMSs can be categorized into three main groups, namely— aggregator based schemes (ABSs), distribution system operator based schemes (DBSs), and system based schemes (SBSs) [199,200,201].
5.1.2.1 Aggregator based schemes
The ABSs can be derived depending on the interest of the charging station owner or EV user or both. The ABS optimize the charging schedules to achieve charging price minimization, uninterrupted charging, or increased system profit, regardless of the electric network constraints [200, 202, 203]. The group of publications [32, 169, 191,192,193] proposes charging using ABS. In these publications, the interests of EV users and/or station owners are handled based on top priority.
Considering management control strategies, a system integrating electric vehicles and aggregators as operators of EV charging management can utilize both centralized and decentralized schemes. A multi-level hierarchical optimizing model is introduced in the research [204]. This model focuses on the worst case state of charge (SOC) and involves decision-making by a central aggregator. The research [205] introduces a centralized energy management method for charging stations (CS) in the presence of an aggregator responsible for coordinating electric vehicle scheduling. The research in [206] presents a concept for an electric vehicle customer incentives pricing approach, which aims to enhance user comfort while simultaneously reducing their charging expenses. A centralized coordinated electric vehicle scheduling system is proposed in [207], where the objective function takes into account a combination of charging expenses and peak shaving/ valley filling. For this investigation, both methods of fast and slow charging are selected based on the level of urgency for each electric vehicle (EV) at a public CS. The authors of [208] proposed an algorithm for scheduling electric vehicles in both commercial and residential sectors, where every sector is managed by a single aggregator. The primary objective of this research is for the aggregator to maximize its profits while also meeting the demand response requirements of distributed systems and fulfilling the needs of electric vehicle owners.
Electric vehicle owners can reduce their expenses by earning revenue from exporting electricity back to the power grid through a network of one or several aggregators. A case study of this can be examined in [209], where a network of EVs is simulated. These EVs participate in the energy and the regulation market by utilizing V2G technology, all under the management of a central aggregator. This investigation focuses on optimizing the maximum income by considering the EVs battery degradation. The researchers of [210] simulated the most unfavourable scenario for the minimal electricity trading with the electric market using V2G service as one of the lower-level objectives in the multilevel optimization situation. The optimization model in [211] incorporates both V2V and V2G capabilities, taking into account real-time electricity prices.
5.1.2.2 Distribution system operator based schemes
Such schemes emphasize the interests of the DSOs in maintaining the operation of the electric network with high efficiency [212, 213]. Therefore, the DBS is expected to be the most beneficial to the electric power network, as its primary goal is to shift peaks of EV charging load and fill the load valleys. The work in [115, 195, 214] is based on DBS. These schemes mainly provide charging through centralized control. Therefore, EV charging can be interrupted at any time to handle the electric network’s constraints.
DSOs based schemes encounter a difficult situation due to the incorporation of distributed renewable energy sources, innovative strategies for assisting prosumers, and the adoption of other DER technologies like EVs, batteries, and demand response programs [215]. EVs may have an impact on the functioning and strategic development of local distribution networks. Their impacts can be classified as voltage and load disturbances. The presence of EVs in the distribution system can lead to an increase in active power losses, which could potentially cause congestion [216]. In order to address these concerns, DSO could be required to make investments in infrastructure enhancements, such as updating power lines or transformers, to mitigate congestion and maintain voltage within the specified limits [217]. The increasing popularity of the EVs and their integrations into electric systems have boosted the significance of DSOs [218].
Recent research has focused on smart grids with electric vehicle integration. These research studies have proposed various energy management systems that take into account various forms of electric vehicle charging as well as the duration of time it takes to charge according to the DSO perspective. Smart charging and V2G charging are essential for reducing electrical network expenses during EV parking. Smart charging is a dynamic charging method that regulates the charging of EVs based on demand, intending to prevent network failures, particularly during periods of high demand such as rush and peak hours [219]. The authors [220] designed a model that indicates the random characteristics of the initial State-of-Charge (SoC) and starting time when charging an individual EV battery. Four residential charging scenarios were formulated: smart, late-hour, controlled and uncontrolled charging. The four scenarios consider energy market rates, indicating that smart charging is valuable for both DSO and the electric vehicle owner. The research [221] aims to establish a negotiation process between the distribution system operator (DSO) and electric vehicle (EV) aggregator. The objective is to achieve a harmonious equilibrium between the stability of the distribution system operation and the financial benefits of EV charging. The DSO uses the best power flow technique to sustain network performance, while the EV aggregator keeps charging prices to a minimum.
5.1.2.3 System based schemes
SBSs offer a combination of the ABS and DBS by compromising the interests of stakeholders. The authors in [196, 197] proposed the SBS for EV charging. The SBS utilizes the objective function of ABS and incorporates limitations analogous to those used by DSOs. The primary goal of this scheme is to minimize the costs associated with charging while also meeting the needs of the DSO. This scheme can yield outcomes that meet the criteria for different entities and consumers [222]. System Based Scheme for EV charging energy management aim to optimize the coordination between electric vehicles, the charging infrastructure, and utility grid in order to achieve optimal efficiency and cost reduction. Generally, these solutions combine an automated control system, a predictive analytics model, and real-time data to effectively manage energy storage, charging time, and power distribution [223]. SBS for electric vehicle charging frequently use V2G technology. This allows EVs to supply electricity back to the utility grid during the periods of high demand, improving stability of the electric grid and lessening the requirement for extra power generation [224].
The primary obstacle in deploying system based scheme for V2G technology is how the general public perceives electric vehicles and their suitability. A significant number of electric vehicles owners have concerns regarding the potential consequences of regular charging and discharging on life-span of their batteries. EV owners also concerned about the financial and time-related risks of being involved in V2G operations [225]. Furthermore, currently EV owners have adequate information about how V2G can help both the individual EV owners and the utility grid. This could result in a reluctance to adopt these kinds of technologies, thus generating challenges to their broad utilization [226].
The SBS aims to minimize charging expenses while satisfying the DSO’s requirements. Therefore, SBS is expected to produce worse results when compared with the ABS and DBS according to their respective objectives. The SBS also interrupts EV charging anytime when it is needed. Table 7 presents the comparative summary of ABS, DBS, and SBS [213].
It is clear from the above discussion that to keep users’ interests on top priority. In this regard, ABS provides the most important insight. Therefore, more literature is reviewed from ABS. The adopted ideas, as well as the algorithms implemented for EM in these publications, are subsequently presented.
5.2 Energy management schemes for EV charging
The purpose of any EMS for the electrical system is to provide a sequence of the power delivery for each power source to achieve the required objectives while optimizing the available energy. An appropriate EMS allows the system to effectively share the power among powertrain components, increase components’ service life, improve system performance, reduce operating costs, increase fuel economy, and reduce carbon dioxide emissions [227]. An open-source framework termed “datafev” based on Python is presented in [228] to develop and test EMS for EV charging. Highly supervisory control is another term for EMS. These control technology like SCADA and PLC are used to control the entire system [229, 230]. Highly supervisory control is further divided into two types (i) optimization-based and (ii) rule-based control strategies [231,232,233].
5.2.1 Optimization-based algorithms
The optimization-based algorithms aim to provide a formal approach to design EMSs. In most cases, an objective function that represents some degree of optimum energy flow is minimized [234, 235]. Two types of optimization-based control are global optimization and real-time optimization. The former is called online strategy using the intelligent transportation system (ITS) and global positioning system (GPS), indicating that it is a casual method that would not require previous information [236]. To acquire optimal and global minima for lowering fuel consumption, real-time algorithm employs different control algorithms like Pontragin’s Minimum Principle (PMP) [237], decoupling control [238], and robust control technique [239, 240].
On the other hand, global optimization is an is an offline technique that is dependent on previous information of the driving cycle and is a non-causal approach to minimizing fuel usage [241]. It can be divided into several algorithms, including stochastic dynamic programming [242], adaptive fuzzy rule-based [243], control theory approach [61], AI [227], simulated annealing (SA) [244], optimal control [245] while others are particle swarm optimization (PSO) [246], linear programming (LP) [247] and genetic algorithm (GA) [43]. The classification and characteristics of optimization-based control strategies are shown in Table 8.
Nowadays, metaheuristic optimization algorithms have gained much attention. To indicate that these algorithms are "higher level" heuristics, the Greek word "Meta" is employed, as contrasted to problem-specific heuristics (that is rule-based). Metaheuristics are widely acknowledged as successful and efficient strategies for complex optimization problems that are difficult to solve within specified constraints and with appropriate fixed methods [264]. In other words, metaheuristics are not specific to a particular issue but provide solutions (usually optimizations) to various problems. To handle complex problems, these algorithms give complementary reasoning and search strategies. These search methods involve iteration processes to find the optimized solution to problems. To have the idea of iterative behavior, the working principle of the PSO algorithm is presented as an example.
PSO is a population-based search strategy based on how flocks of birds behave [265]. It keeps a population of individuals in which every particle is a possible solution. Particles exhibit simple behaviours in which they emulate the successes of nearby particles. Particle position, xi, is adjusted using the following expression:
where velocity component (vi), represents the step size. vi is calculated by:
where \({G}_{best}\) is the position of the particles called global best, \({c}_{1}\) and \({c}_{2}\) are acceleration coefficients, w is inertia weight, r1, \({r}_{2}\) ∈ \(U(0, 1)\), \({P}_{best{}_{i}}\) is personal best position of the particle I called personal best. Note that r1 and r2 are the random numbers. Inertia weight (\(w\)) is crucial for maintaining balance between local and global search. Small values of the inertia weight improve local search while high values facilitate global search. It can have the positive decreasing linear function of the iteration index k or the positive constant value which can be found as [266];
where \(ite{r}_{max} i\) s maximum times of iteration and \({w}_{max}\) is the start of the inertia weight, set as 0.9, \({w}_{min}\) is end of the inertia weight which can be set as 0.4. Figure 7 shows the typical movement of the particles in the PSO process.

Movement of the particles in the PSO process
Figure 8 shows the execution process of a simple PSO, which can be described and explained using the phases below [266]:
-
(i)
The population is randomly created in search space.
-
(ii)
The initial velocities of all particles are randomly generated.
-
(iii)
The objective function values of all particles are calculated.
-
(iv)
\({G}_{best}\) represents the selection of the best particle in the population and the initial position of each particle is chosen as \({P}_{best}\).
-
(v)
Using the Eqs. (1) and (2), the particles are moved to their new positions
-
(vi)
A particle is replaced with its previous position if it goes outside of its permitted range.
-
(vii)
The objective function values of all particles are calculated.
-
(viii)
\({G}_{best}\) and \({P}_{best}\) are updated.
-
(ix)
Criteria for stopping are evaluated. The algorithm is terminated if it is satisfied. Otherwise, repeat steps (v)–(viii). The maximum numbers of the iterations (\(ite{r}_{max}\)) is used as the stopping criterion for terminating the iterative process.

Flowchart of PSO as a sample metaheuristic optimization algorithm
It is clear from the operation of PSO that the optimization-based algorithms reach the solutions through the iteration process— increasing the decision-making time compared to the time taken by the rule-based algorithms which have no such iterations.
5.2.2 Rule-based algorithms
The industry is dominated by rule-based EM algorithms because of their rapid computation potential [231]. Due to several advantages such as the lack of complex mathematical equations, short-time solutions, and future decision-making data, these have been deemed the best available tool for making decisions in real time. [238, 267]. To create a set of rules, these algorithms dependent on human expertise and understanding of the system [268].
Deterministic and fuzzy logic are the two types of high-level control. The deterministic control strategies are divided into the following four subcategories: state machine-based strategy [61], power follower (base-line) control strategy [244], modified power follower (based on line strategy) [245], and thermostat (on/off) control strategy [269]. On the other hand, fuzzy logic techniques are divided into three subcategories: fuzzy adaptive strategy [270], convectional fuzzy strategy [227], and fuzzy predictive strategy [271]. The classification and characteristics of rule-based control strategies (high-level control) are shown in Table 9.
Deterministic algorithms function according to a set of rules those have been specified before the actual operation of the system. The fuzzy algorithms still utilize predetermined rules, but, these based on "degrees of truth" in contrast to the more common "true or false" [279]. Fuzzy rules are not suitable for controlling systems that need for the highest level of precision because they are based on approximations. The imprecision in decision-making and the complexity of rules formation further increases for a large number of system components [18, 279]. Therefore, practically, deterministic rule-based algorithm is commonly used to solve EM problems as it is computationally more efficient and generates accurate results [231, 280].
Deterministic rule-based (simply called rule-based in this research) algorithms explain exactly what would have happened in different scenarios [281, 282]. As a result, EM issues are addressed by scheduling resources only in accordance with a set of rules, where real time decisions are made without the use of optimization techniques [191]. In contrast to the optimization-based algorithms, the rule-based are problem-specific and need to be redefined for different challenges. However, data predictions are not required for the implementation of rule-based algorithms, making them suitable for real-time decision-making. Recent literature shows that many researchers have adopted the rule-based approach for EM of electrical power systems [32, 187, 193, 195, 268, 281]. Not only in power systems, the rule-based approaches have been widely applied in various other fields; for example, banking system [283], livestock farms [284], medical sciences [285], business management [286], computer tools [287], agricultural applications [288] and the manufacturing process [289].
To establish these algorithms, ‘if–then’ rule sets are defined according to numerous scenarios [173, 195, 268, 280, 290, 291]. The ‘if’ statement is linked to specific scenarios (cases/conditions) and ‘then’ performs a specific action of the system under the given scenario [290]. To have a conceptual understanding of this approach, a simple example of a self-explanatory rule-based algorithm is given in Fig. 9. The flowchart in this figure presents the decisions taken to balance the energy between the battery and the capacitor installed within EV [281]. Here, the diamond shapes represent various scenarios and the boxes show the operating modes.

An example of a simple rule-based algorithm
Although the above algorithm is very general and the result is not optimal, the performance of rule-based schemes can be improved significantly by considering additional scenarios [281]. It is clear from the above example that rule-based algorithms do not have an iterative process that makes them efficient in decision-making.
5.2.3 Comparison of optimization and rule-based algorithms
The EM algorithms mentioned above have their own pros and cons. A careful examination can lead to the selection of a proper algorithm to be used in the real-time application. Thus, Table 10 shows a comprehensive comparison between these algorithms [191, 280].
It is concluded from the above discussion that the rule-based algorithms are computationally efficient as compared to the optimization algorithms. More so, in contrast to optimization-based algorithms, rule-based algorithms have no such requirements that the future journey profile is known for decision-making which makes them suitable for real-time applications. Owing to the above-mentioned advantages, the rule-based approaches in the development of EMSs for EV charging systems are more promising.
5.3 Analysis of installed pilot EV sites
Numerous studies provide insightful data for analyzing the findings of pilot sites for electric vehicle (EV) charging stations with sophisticated capabilities and power electronics. Initial results of an EV ownership in the United States with a significant number of public and private charging stations are provided by Schäuble et al. [292]. This study sheds light on the deployment scale and the number of plug-in hybrid electric vehicles (PHEVs) involved, which can be crucial for understanding the impact of such infrastructure. Power architectures and circuit topologies for future megawatt ultrafast electric vehicle charging stations with improved grid support functions have been investigated by Wang et al. [293]. Pinto et al. [294] discuss power electronics converters for fast charging stations with storage capacity, emphasizing efficient energy management. The novel solid-state transformer-based EV charging station concept proposed proposed by Eshkevari et al. [295] ensures high power supply without impacting grid quality. Safayatullah et al. [296] emphasize the significance of high-power, low-cost solutions in their thorough evaluation of power converter topologies and control techniques for fast EV charging applications. Additionally, Vasiladiotis & Rufer [297] present a modular multiport power electronic transformer with integrated split battery energy storage for ultrafast electric vehicle charging stations, demonstrating flexible and efficient charging solutions. Table 11 provides comprehensive descriptions of V2G technology projects that have been completed or are currently ongoing around the world.
Analysing these research studies indicates that advancements in power architectures, power electronics converters, solid-state transformers (SST), and innovative transformer designs are crucial for improving the functionality and efficiency of electric vehicle charging stations. These technologies are crucial for meeting the growing demand for reliable and fast charging infrastructure to facilitate the broad acceptance of electric vehicles.
6 Conclusion
It is anticipated that the use of electric vehicles will increase significantly in the coming decade as a result of advancements in EV technology. Increased adoption of the EV needs the proper charging arrangement in the form of charging along with suitable EMSs for coordination among available energy and the charging demand. However, the available literature on this topic lacks in providing a comparative survey on different aspects of this field to properly guide the people interested in this area. To mitigate this gap, this research work is an effort to provide the know-how about the important aspects of the overall EV charging setup. This article reviews the achievements of EMS in terms of improving fuel consumption efficiency and reducing carbon dioxide emissions in EV systems. This article focuses on the state-of-the-art and most up-to-date standards of EV technology, EV batteries, chargers and charging power levels (levels 1, 2 & 3), and charging infrastructure. Power infrastructure in the EV charging station is discussed in accordance with type of power used, physical contacts, and the direction of power flow. In addition, charging schemes through the standard grid and RE resources have been explored. In the standard grid, EV charging is solely accomplished by the utility grid. On the other hand, in the case of RE grid systems, charging can be done through the grid as well as RE sources (such as solar (PV), wind, and biomass). This article introduces a comparative survey of the standard grid and PV-grid charging systems. It also discussed different EV charging control configurations, namely centralized and decentralized. It also introduces the comparative survey between different EMS algorithms and highlights the benefits and drawbacks of each algorithm. The PV grid system can provide a more feasible solution for the day-time charging of EVs in office parking spaces than a standard utility grid system. However, to effectively utilize hybrid power sources, an efficient and intelligent EMS is required. Rule-based EM algorithms are computationally efficient compared to optimization algorithms. The work presented in this review paper will provide a thorough understanding and in-depth knowledge of EV charging infrastructure, standards, and EV charging control configurations namely centralized and decentralized, EV charging through standard grid and RE resources. It also introduces the comparative survey between different EMS algorithms to the engineers and researchers in order to shape future research needs.
Data availability
Data generated or analysed during this study is provided within this manuscript.
References
Tahir Y, Khan I, Rahman S, Nadeem MF, Iqbal A, Xu Y, Rafi M. A state-of-the-art review on topologies and control techniques of solid-state transformers for electric vehicle extreme fast charging. IET power electronics. 2021;14(9):1560–76.
Fernández G, Torres J, Cervero D, García E, Alonso MÁ, Almajano J, Sanz JF. EV charging infrastructure in a petrol station, lessons learned. In: 2018 International Symposium on Industrial Electronics (INDEL), 2018;pp 1–6. IEEE.
Ghavami M, Singh, C. Reliability evaluation of electric vehicle charging systems including the impact of repair. In: 2017 IEEE Industry Applications Society Annual Meeting. 2017;pp. 1–9, IEEE.
Zhang J, Jia R, Yang H, Dong K. Does electric vehicle promotion in the public sector contribute to urban transport carbon emissions reduction? Transp Policy. 2022;125:151–63.
Yin W, Ji J, Wen T, Zhang C. Study on orderly charging strategy of EV with load forecasting. Energy. 2023;278: 127818.
Choi H, Lee J, Koo Y. Value of different electric vehicle charging facility types under different availability situations: a South Korean case study of electric vehicle and internal combustion engine vehicle owners. Energy Policy. 2023;174: 113436.
Ronanki D, Kelkar A, Williamson SS. Extreme fast charging technology—prospects to enhance sustainable electric transportation. Energies. 2019;12(19):3721.
Srdic S, Lukic S. Toward extreme fast charging: challenges and opportunities in directly connecting to medium-voltage line. IEEE Electrification Magazine. 2019;7(1):22–31.
Tran MK, Fowler M. A review of lithium-ion battery fault diagnostic algorithms: current progress and future challenges. Algorithms. 2020;13(3):62.
Tamoor M, Hussain MI, Bhatti AR, Miran S, Arif W, Kiren T, Lee GH. Investigation of dust pollutants and the impact of suspended particulate matter on the performance of photovoltaic systems. Front Energy Res. 2022;10:1017293.
Van Mierlo J. The world electric vehicle journal, the open access journal for the e-mobility scene. World Electric Veh J. 2018;9(1):1.
Tran MK, Akinsanya M, Panchal S, Fraser R, Fowler M. Design of a hybrid electric vehicle powertrain for performance optimization considering various powertrain components and configurations. Vehicles. 2020;3(1):20–32.
Lai CS, Jia Y, Dong Z, Wang D, Tao Y, Lai QH, Lai LL. A review of technical standards for smart cities. Clean Technol. 2020;2(3):290–310.
Bisoyi SK, Terang PP, Pathak L, Singh AK, Singh S, Khare R. Design of an EV Charging System with Improved Performance. In: Sustainable Energy and Technological Advancements: Proceedings of ISSETA 2021. 2022;pp. 541–558. Singapore: Springer Singapore.
Kelouwani S, Henao N, Agbossou K, Dube Y, Boulon L. Two-layer energy-management architecture for a fuel cell HEV using road trip information. IEEE Trans Veh Technol. 2012;61(9):3851–64.
Chen HC, Huang BW. Integrated G2V/V2G switched reluctance motor drive with sensing only switch-bus current. IEEE Trans Power Electron. 2021;36(8):9372–81.
Thompson AW, Perez Y. Vehicle-to-Everything (V2X) energy services, value streams, and regulatory policy implications. Energy Policy. 2020;137: 111136.
Bhatti AR, Salam Z, Aziz MJBA, Yee KP, Ashique RH. Electric vehicles charging using photovoltaic: status and technological review. Renew Sustain Energy Rev. 2016;54:34–47.
Fu Y, Li Y, Huang Y, Bai H, Zou K, Lu X, Chen C. Design methodology of a three-phase four-wire EV charger operated at the autonomous mode. IEEE Trans Transportation Electrif. 2019;5(4):1169–81.
Monteiro V, Pinto JG, Afonso JL. Operation modes for the electric vehicle in smart grids and smart homes: present and proposed modes. IEEE Trans Veh Technol. 2015;65(3):1007–20.
Buja G, Bertoluzzo M, Fontana C. Reactive power compensation capabilities of V2G-enabled electric vehicles. IEEE Trans Power Electron. 2017;32(12):9447–59.
Chelladurai B, Sundarabalan CK, Santhanam SN, Guerrero JM. Interval type-2 fuzzy logic controlled shunt converter coupled novel high-quality charging scheme for electric vehicles. IEEE Trans Industr Inf. 2020;17(9):6084–93.
Mets K, Verschueren T, Haerick W, Develder C, De Turck F. Optimizing smart energy control strategies for plug-in hybrid electric vehicle charging. In: 2010 IEEE/IFIP network operations and management symposium workshops. 2010;pp. 293–299. IEEE.
Wang Z, Wang S. Grid power peak shaving and valley filling using vehicle-to-grid systems. IEEE Trans Power Delivery. 2013;28(3):1822–9.
Pang C, Dutta P, Kezunovic M. BEVs/PHEVs as dispersed energy storage for V2B uses in the smart grid. IEEE Trans smart grid. 2011;3(1):473–82.
Hinkle C, Millner A, Ross W. Bi-directional power architectures for electric vehicles. In: 2011 8th International Conference & Expo on Emerging Technologies for a Smarter World. 2011;pp. 1–6. IEEE.
Gagne C, Tanguy K, Lopez KL, Dubois MR. Vehicle-to-Building is economically viable in regulated electricity markets. In: 2015 IEEE Vehicle Power and Propulsion Conference (VPPC). 2015;pp. 1–6. IEEE.
Richardson DB. Electric vehicles and the electric grid: a review of modeling approaches, impacts, and renewable energy integration. Renew Sustain Energy Rev. 2013;19:247–54.
Silva LC, Eckert JJ, Lourenco MA, Silva FL, Correa FC, Dedini FG. Electric vehicle battery-ultracapacitor hybrid energy storage system and drivetrain optimization for a real-world urban driving scenario. J Braz Soc Mech Sci Eng. 2021;43(5):259.
Chakraborty P, Parker R, Hoque T, Cruz J, Du L, Wang S, Bhunia S. Addressing the range anxiety of battery electric vehicles with charging en route. Sci Rep. 2022;12(1):5588.
Panchal S, Gudlanarva K, Tran MK, Fraser R, Fowler M. High reynold’s number turbulent model for micro-channel cold plate using reverse engineering approach for water-cooled battery in electric vehicles. Energies. 2020;13(7):1638.
Bhatti AR, Salam Z, Aziz MJBA, Yee KP. A critical review of electric vehicle charging using solar photovoltaic. Int J Energy Res. 2016;40(4):439–61.
Yu X, Manthiram A. Sustainable battery materials for next-generation electrical energy storage. Adv Energy Sustain Res. 2021;2(5):2000102.
Chian TY, Wei W, Ze E, Ren L, Ping Y, Bakar NA, Sivakumar S. A review on recent progress of batteries for electric vehicles. Int J Appl Eng Res. 2019;14(24):4441–61.
Mevawalla A, Panchal S, Tran MK, Fowler M, Fraser R. Mathematical heat transfer modeling and experimental validation of lithium-ion battery considering: tab and surface temperature, separator, electrolyte resistance, anode-cathode irreversible and reversible heat. Batteries. 2020;6(4):61.
Mevawalla A, Panchal S, Tran MK, Fowler M, Fraser R. One dimensional fast computational partial differential model for heat transfer in lithium-ion batteries. J Energy Storage. 2021;37: 102471.
Hao H, Cheng X, Liu Z, Zhao F. China’s traction battery technology roadmap: targets, impacts and concerns. Energy Policy. 2017;108:355–8.
Ding Y, Cano ZP, Yu A, Lu J, Chen Z. Automotive Li-ion batteries: current status and future perspectives. Electrochem Energy Rev. 2019;2:1–28.
Wu H, Zhang Y, Deng Y, Huang Z, Zhang C, He YB, Yang QH. A lightweight carbon nanofiber-based 3D structured matrix with high nitrogen-doping level for lithium metal anodes. Sci China Mater. 2019;62(1):87–94.
Li S, Jiang M, Xie Y, Xu H, Jia J, Li J. Developing high-performance lithium metal anode in liquid electrolytes: challenges and progress. Adv Mater. 2018;30(17):1706375.
Suryadi PN, Karunawan J, Floweri O, Iskandar F. Toward high-rate capability of intercalation cathodes Li-ion batteries, potency for fast-charging application: a materials perspective. J Energy Storage. 2023;68: 107634.
Naseri F, Gil S, Barbu C, Çetkin E, Yarimca G, Jensen AC, Gomes C. Digital twin of electric vehicle battery systems: comprehensive review of the use cases, requirements, and platforms. Renew Sustain Energy Rev. 2023;179: 113280.
Yilmaz M, Krein PT. Review of battery charger topologies, charging power levels, and infrastructure for plug-in electric and hybrid vehicles. IEEE Trans Power Electron. 2012;28(5):2151–69.
Porkodi M, Gopila M, Madumathi K, Prasad D, Purushotham S, Suresh G. Analysis of various configurations of hybrid electric vehicles and charging methodologies. Int J Electrical Eng Technol (IJEET). 2021;12(1):131–44.
Habib S, Khan MM, Hashmi K, Ali M, Tang H. A comparative study of electric vehicles concerning charging infrastructure and power levels. In: 2017 International Conference on Frontiers of Information Technology (FIT), 2017;pp. 327–332. IEEE.
Radimov N, Li G, Tang M, Wang X. Three-stage SiC-based bi-directional on-board battery charger with titanium level efficiency. IET Power Electron. 2020;13(7):1477–80.
Joseph PK, Devaraj E, Gopal A. Overview of wireless charging and vehicle-to-grid integration of electric vehicles using renewable energy for sustainable transportation. IET Power Electron. 2019;12(4):627–38.
García-Villalobos J, Zamora I, San Martín JI, Asensio FJ, Aperribay V. Plug-in electric vehicles in electric distribution networks: a review of smart charging approaches. Renew Sustain Energy Rev. 2014;38:717–31.
Karali N, Gopal AR, Steward D, Connelly E, Hodge C. Vehicle-grid integration. Lawrence Berkeley National Laboratory. 2017
Toosi HE, Merabet A, Al-Durra A, Swingler A. Optimal battery cycling strategies in workplaces with electric vehicle chargers, energy storage systems and renewable energy generation. IET Renew Power Gener. 2022;16(6):1121–33.
Valedsaravi S, El Aroudi A, Martínez-Salamero L. Review of solid-state transformer applications on electric vehicle DC ultra-fast charging station. Energies. 2022;15(15):5602.
Cervero D, Fotopoulou M, Muñoz-Cruzado J, Rakopoulos D, Stergiopoulos F, Nikolopoulos N, Sanz JF. Solid state transformers: a critical review of projects with relevant prototypes and demonstrators. Electronics. 2023;12(4):931.
Abu-Siada A, Budiri J, Abdou AF. Solid state transformers topologies, controllers, and applications: state-of-the-art literature review. Electronics. 2018;7(11):298.
Ashique RH, Salam Z, Aziz MJBA, Bhatti AR. Integrated photovoltaic-grid dc fast charging system for electric vehicle: a review of the architecture and control. Renew Sustain Energy Rev. 2017;69:1243–57.
Tesla supercharger station locator. Supercharger. 2021 [cited 2022; Available from: https://supercharge.info/charts.
CAA electric vehicle charging station locator. Serving Canadian Travellers. 2021 [cited 2022; Available from: http://www.caa.ca/evstations.
Ustun TS, Hussain SS, Syed MH, Dambrauskas P. IEC-61850-based communication for integrated EV management in power systems with renewable penetration. Energies. 2021;14(9):2493.
Campi T, Cruciani S, Maradei F, Feliziani M. Magnetic field during wireless charging in an electric vehicle according to standard SAE J2954. Energies. 2019;12(9):1795.
Photovoltaics DG, Storage E. IEEE standard for interconnection and interoperability of distributed energy resources with associated electric power systems interfaces. IEEE std. 2018;1547(1547):2018.
Zhu T, Zheng H, Ma Z. A chaotic particle swarm optimization algorithm for solving optimal power system problem of electric vehicle. Adv Mech Eng. 2019;11(3):1687814019833500.
Das HS, Rahman MM, Li S, Tan CW. Electric vehicles standards, charging infrastructure, and impact on grid integration: a technological review. Renew Sustain Energy Rev. 2020;120: 109618.
National Fire Protection Association. National Electrical Code Committee. NFPA 70: National electrical code. Vol. 70. 2021: National Fire Protection Association.
Gjelaj M, Træholt C, Hashemi S, Andersen PB. Cost-benefit analysis of a novel DC fast-charging station with a local battery storage for EVs. In: 2017 52nd International Universities Power Engineering Conference (UPEC), 2017;pp. 1–6. IEEE.
Elsayed AT, Mohamed AA, Mohammed OA. DC microgrids and distribution systems: an overview. Electric Power Syst Res. 2015;119:407–17.
Cao Y, Ahmad N, Kaiwartya O, Puturs G, Khalid M. Intelligent transportation systems enabled ICT framework for electric vehicle charging in smart city. Handb Smart Cities Softw Serv Cyber Infrastruct. 2018. https://doi.org/10.1007/978-3-319-97271-8_12.
Manivannan B, Kathirvelu P, Balasubramanian R. A review on wireless charging methods–the prospects for future charging of EV. Renew Energy Focus. 2023;46:68–87.
Ram SK, Devassy S, Verma BK, Mishra S, Akbar SA. Review on renewable energy based ev charging system with grid support functionality. In: 2021 7th International Conference on Advanced Computing and Communication Systems (ICACCS). 2021;Vol. 1, pp. 482–487. IEEE.
Mishra D, Singh B, Panigrahi BK. Adaptive current control for a bidirectional interleaved EV charger with disturbance rejection. IEEE Trans Ind Appl. 2021;57(4):4080–90.
Habib S, Khan MM, Huawei J, Hashmi K, Faiz MT, Tang H. A study of implemented international standards and infrastructural system for electric vehicles. In: 2018 IEEE International Conference on Industrial Technology (ICIT), 2018;pp. 1783–1788. IEEE.
Vadi S, Bayindir R, Colak AM, Hossain E. A review on communication standards and charging topologies of V2G and V2H operation strategies. Energies. 2019;12(19):3748.
Elkholy MH, Metwally H, Farahat MA, Nasser M, Senjyu T, Lotfy ME. Dynamic centralized control and intelligent load management system of a remote residential building with V2H technology. J Energy Storage. 2022;52: 104839.
Mao T, Zhang X, Zhou B. Intelligent energy management algorithms for EV-charging scheduling with consideration of multiple EV charging modes. Energies. 2019;12(2):265.
Houbbadi A, Trigui R, Pelissier S, Redondo-Iglesias E, Bouton T. Optimal scheduling to manage an electric bus fleet overnight charging. Energies. 2019;12(14):2727.
Wu Y, Wang Z, Huangfu Y, Ravey A, Chrenko D, Gao F. Hierarchical operation of electric vehicle charging station in smart grid integration applications—an overview. Int J Electr Power Energy Syst. 2022;139: 108005.
Wu Y, Ravey A, Chrenko D, Miraoui A. Demand side energy management of EV charging stations by approximate dynamic programming. Energy Convers Manage. 2019;196:878–90.
Cheng S, Feng Y, Wang X. Application of Lagrange relaxation to decentralized optimization of dispatching a charging station for electric vehicles. Electronics. 2019;8(3):288.
Tian A, Li W, Li Z, Sun Y. Network security-aware charging of electric vehicles. Int J Electr Power Energy Syst. 2018;100:42–9.
Rahman MM, Al-Ammar EA, Das HS, Ko W. Technical assessment of plug-in hybrid electric vehicle charging scheduling for peak reduction. In: 2019 10th International Renewable Energy Congress (IREC), 2019;pp. 1–5. IEEE.
Tang Y, Zhang Q, Li H, Li Y, Liu B. Economic analysis on repurposed EV batteries in a distributed PV system under sharing business models. Energy procedia. 2019;158:4304–10.
Abdullah-Al-Nahid S, Khan TA, Taseen MA, Jamal T, Aziz T. A novel consumer-friendly electric vehicle charging scheme with vehicle to grid provision supported by genetic algorithm based optimization. J Energy Storage. 2022;50: 104655.
Makeen P, Memon S, Elkasrawy MA, Abdullatif SO, Ghali HA. Smart green charging scheme of centralized electric vehicle stations. Int J Green Energy. 2022;19(5):490–8.
Wang R, Xiao G, Wang P. Hybrid centralized-decentralized (HCD) charging control of electric vehicles. IEEE Trans Veh Technol. 2017;66(8):6728–41.
Hajforoosh S, Masoum MA, Islam SM. Real-time charging coordination of plug-in electric vehicles based on hybrid fuzzy discrete particle swarm optimization. Electric Power Syst Res. 2015;128:19–29.
Boglou V, Karavas CS, Karlis A, Arvanitis K. An intelligent decentralized energy management strategy for the optimal electric vehicles’ charging in low-voltage islanded microgrids. Int J Energy Res. 2022;46(3):2988–3016.
Moschella M, Ferraro P, Crisostomi E, Shorten R. Decentralized assignment of electric vehicles at charging stations based on personalized cost functions and distributed ledger technologies. IEEE Internet Things J. 2021;8(14):11112–22.
Richardson P, Flynn D, Keane A. Local versus centralized charging strategies for electric vehicles in low voltage distribution systems. IEEE Trans Smart Grid. 2012;3(2):1020–8.
Atallah RF, Assi CM, Fawaz W, Tushar MHK, Khabbaz MJ. Optimal supercharge scheduling of electric vehicles: centralized versus decentralized methods. IEEE Trans Veh Technol. 2018;67(9):7896–909.
Domínguez C, Doña A, Navarro-Espinosa A. Is single-phase residential EV fast-charging a good idea? Evidence from optimal charging plans based on realistic data. Int J Electr Power Energy Syst. 2023;152: 109231.
Asna M, Shareef H, Prasanthi A. Planning of fast charging stations with consideration of EV user, distribution network and station operation. Energy Rep. 2023;9:455–62.
Hamed MM, Kabtawi DM, Al-Assaf A, Albatayneh O, Gharaibeh ES. Random parameters modeling of charging-power demand for the optimal location of electric vehicle charge facilities. J Clean Prod. 2023;388: 136022.
Amry Y, Elbouchikhi E, Le Gall F, Ghogho M, El Hani S. Optimal sizing and energy management strategy for EV workplace charging station considering PV and flywheel energy storage system. J Energy Storage. 2023;62: 106937.
Ghodusinejad MH, Noorollahi Y, Zahedi R. Optimal site selection and sizing of solar EV charge stations. J Energy Storage. 2022;56: 105904.
Nishanthy J, Raja SC, Nesamalar JJD. Feasibility analysis of solar PV system in presence of EV charging with transactive energy management for a community-based residential system. Energy Convers Manage. 2023;288: 117125.
Van Mierlo J, Berecibar M, El Baghdadi M, De Cauwer C, Messagie M, Coosemans T, Hegazy O. Beyond the state of the art of electric vehicles: a fact-based paper of the current and prospective electric vehicle technologies. World Electric Veh J. 2021;12(1):20.
Ahmed A, Iqbal A, Khan I, Al-Wahedi A, Mehrjerdi H, Rahman S. Impact of EV charging station penetration on harmonic distortion level in utility distribution network: A case study of Qatar. In: 2021 IEEE Texas power and energy conference (TPEC), 2021;pp 1–6. IEEE.
Rahman S, Khan IA, Khan AA, Mallik A, Nadeem MF. Comprehensive review & impact analysis of integrating projected electric vehicle charging load to the existing low voltage distribution system. Renew Sustain Energy Rev. 2022;153: 111756.
Ahmad F, Iqbal A, Ashraf I, Marzband M. Optimal location of electric vehicle charging station and its impact on distribution network: a review. Energy Rep. 2022;8:2314–33.
Sayed MA, Atallah R, Assi C, Debbabi M. Electric vehicle attack impact on power grid operation. Int J Electr Power Energy Syst. 2022;137: 107784.
Hannan MA, Mollik MS, Al-Shetwi AQ, Rahman SA, Mansor M, Begum RA, Dong ZY. Vehicle to grid connected technologies and charging strategies: operation, control, issues and recommendations. J Clean Prod. 2022;339: 130587.
Zhang W, Gandhi O, Quan H, Rodríguez-Gallegos CD, Srinivasan D. A multi-agent based integrated volt-var optimization engine for fast vehicle-to-grid reactive power dispatch and electric vehicle coordination. Appl Energy. 2018;229:96–110.
Arias NB, Hashemi S, Andersen PB, Træholt C, Romero R. V2G enabled EVs providing frequency containment reserves: Field results. In: 2018 IEEE international conference on industrial technology (ICIT), 2018;pp. 1814–1819. IEEE.
Iqbal S, Xin A, Jan MU, ur Rehman H, Masood A, Rizvi SAA, Salman S. Aggregated electric vehicle-to-grid for primary frequency control in a microgrid-A Review. In: 2018 IEEE 2nd International Electrical and Energy Conference (CIEEC), 2018;pp. 563–568. IEEE.
Domínguez-Navarro JA, Dufo-López R, Yusta-Loyo JM, Artal-Sevil JS, Bernal-Agustín JL. Design of an electric vehicle fast-charging station with integration of renewable energy and storage systems. Int J Electr Power Energy Syst. 2019;105:46–58.
Deb S, Gao XZ, Tammi K, Kalita K, Mahanta P. A novel chicken swarm and teaching learning based algorithm for electric vehicle charging station placement problem. Energy. 2021;220: 119645.
Abbas F, Feng D, Habib S, Numan M, Rahman U. A heuristically optimized comprehensive charging scheme for large-scale EV integration. Int Trans Electrical Energy Syst. 2020;30(5): e12313.
Khalkhali H, Hosseinian SH. Multi-class EV charging and performance-based regulation service in a residential smart parking lot. Sustain Energy Grids Netw. 2020;22: 100354.
Li Y, Mohammed SQ, Nariman GS, Aljojo N, Rezvani A, Dadfar S. Energy management of microgrid considering renewable energy sources and electric vehicles using the backtracking search optimization algorithm. J Energy Res Technol. 2020;142(5): 052103.
Tamoor M, Abu Bakar Tahir M, Zaka MA, Iqtidar E. Photovoltaic distributed generation integrated electrical distribution system for development of sustainable energy using reliability assessment indices and levelized cost of electricity. Environ Progress Sustain Energy. 2022;41(4): e13815.
Alkawsi G, Baashar Y, Abbas UD, Alkahtani AA, Tiong SK. Review of renewable energy-based charging infrastructure for electric vehicles. Appl Sci. 2021;11(9):3847.
Sujitha N, Krithiga S. RES based EV battery charging system: a review. Renew Sustain Energy Rev. 2017;75:978–88.
Al Wahedi A, Bicer Y. Techno-economic optimization of novel stand-alone renewables-based electric vehicle charging stations in Qatar. Energy. 2022;243: 123008.
Aljehane NO, Mansour RF. Optimal allocation of renewable energy source and charging station for PHEVs. Sustain Energy Technol Assess. 2022;49: 101669.
Nishanthy J, Charles Raja S, Praveen T, Jeslin Drusila Nesamalar J, Venkatesh P. Techno-economic analysis of a hybrid solar wind electric vehicle charging station in highway roads. Int J Energy Res. 2022;46(6):7883–903.
Park SW, Cho KS, Hoefter G, Son SY. Electric vehicle charging management using location-based incentives for reducing renewable energy curtailment considering the distribution system. Appl Energy. 2022;305: 117680.
Arias NB, Franco JF, Lavorato M, Romero R. Metaheuristic optimization algorithms for the optimal coordination of plug-in electric vehicle charging in distribution systems with distributed generation. Electric Power Syst Res. 2017;142:351–61.
Tamoor M, Habib S, Bhatti AR, Butt AD, Awan AB, Ahmed EM. Designing and energy estimation of photovoltaic energy generation system and prediction of plant performance with the variation of tilt angle and interrow spacing. Sustainability. 2022;14(2):627.
Polimeni S, Nespoli A, Leva S, Valenti G, Manzolini G. Implementation of different PV forecast approaches in a multiGood microGrid: modeling and experimental results. Processes. 2021;9(2):323.
Tamoor M, Tahir MS, Sagir M, Tahir MB, Iqbal S, Nawaz T. Design of 3 kW integrated power generation system from solar and biogas. Int J Hydrogen Energy. 2020;45(23):12711–20.
Li C, Zhang L, Ou Z, Wang Q, Zhou D, Ma J. Robust model of electric vehicle charging station location considering renewable energy and storage equipment. Energy. 2022;238: 121713.
Noman F, Alkahtani AA, Agelidis V, Tiong KS, Alkawsi G, Ekanayake J. Wind-energy-powered electric vehicle charging stations: resource availability data analysis. Appl Sci. 2020;10(16):5654.
Ahadi A, Sarma S, Moon JS, Kang S, Lee JH. A robust optimization for designing a charging station based on solar and wind energy for electric vehicles of a smart home in small villages. Energies. 2018;11(7):1728.
Fathabadi H. Novel wind powered electric vehicle charging station with vehicle-to-grid (V2G) connection capability. Energy Convers Manage. 2017;136:229–39.
Nikkhah MH, Lotfi H, Samadi M, Hajiabadi ME. Optimal allocation of transmission fixed costs to electric vehicle charging stations and wind farms using an analytical method and structural decomposition. Sustain Energy Grids Netw. 2023;34: 101061.
Asgharzadeh F, Tabar VS, Ghassemzadeh S. Stochastic bi-level allocation of electric vehicle charging stations in the presence of wind turbines, crypto-currency loads and demand side management. Electric Power Syst Res. 2023;220: 109383.
Perea-Moreno MA, Samerón-Manzano E, Perea-Moreno AJ. Biomass as renewable energy: worldwide research trends. Sustainability. 2019;11(3):863.
Tamoor M, Bhatti AR, Hussain MI, Miran S, Kiren T, Ali A, Lee GH. Optimal sizing and technical assessment of a hybrid renewable energy solution for off-grid community center power. Front Energy Res. 2023;11:1283586.
Hakawati R, Smyth BM, McCullough G, De Rosa F, Rooney D. What is the most energy efficient route for biogas utilization: heat, electricity or transport? Appl Energy. 2017;206:1076–87.
Karmaker AK, Hossain MA, Manoj Kumar N, Jagadeesan V, Jayakumar A, Ray B. Analysis of using biogas resources for electric vehicle charging in Bangladesh: a techno-economic-environmental perspective. Sustainability. 2020;12(7):2579.
Akbay HEG, Dizge N, Kumbur H. Enhancing biogas production of anaerobic co-digestion of industrial waste and municipal sewage sludge with mechanical, chemical, thermal, and hybrid pretreatment. Biores Technol. 2021;340: 125688.
Tamoor M, Sagir M, Abbas G, Ans Zaka M, ZakaUllah P. Design, construction and production of small scale energy generation plant using indigenous resources. Iranica J Energy Environ. 2020;11(4):308–19.
Pocha CKR, Chia WY, Kurniawan TA, Khoo KS, Chew KW. Thermochemical conversion of different biomass feedstocks into hydrogen for power plant electricity generation. Fuel. 2023;340: 127472.
Kumar I, Feng K, Sun L, Bandaru V. Adoption of biomass for electricity generation in Thailand: implications for energy security, employment, environment, and land use change. Renew Energy. 2022;195:1454–67.
Habib S, Jia Y, Tamoor M, Zaka MA, Shi M, Dong Q. Modeling, simulation, and experimental analysis of a photovoltaic and biogas hybrid renewable energy system for electrification of rural community. Energ Technol. 2023;11(10):2300474.
Fachrizal R, Shepero M, Åberg M, Munkhammar J. Optimal PV-EV sizing at solar powered workplace charging stations with smart charging schemes considering self-consumption and self-sufficiency balance. Appl Energy. 2022;307: 118139.
Bhatti AR, Salam Z. Charging of electric vehicle with constant price using photovoltaic based grid-connected system. In: 2016 IEEE International Conference on Power and Energy (PECon), 2016;pp. 268–273. IEEE.
Kumar V, Teja VR, Singh M, Mishra S. PV based off-grid charging station for electric vehicle. IFAC-PapersOnLine. 2019;52(4):276–81.
Kumar N, Kumar T, Nema S, Thakur T. A multiobjective planning framework for EV charging stations assisted by solar photovoltaic and battery energy storage system in coupled power and transportation network. Int J Energy Res. 2022;46(4):4462–93.
Erdemir D, Dincer I. Development of solar-driven charging station integrated with hydrogen as an energy storage option. Energy Convers Manage. 2022;257: 115436.
Rahman I, Vasant PM, Singh BSM, Abdullah-Al-Wadud M, Adnan N. Review of recent trends in optimization techniques for plug-in hybrid, and electric vehicle charging infrastructures. Renew Sustain Energy Rev. 2016;58:1039–47.
Amir M, Zaheeruddin, Haque A, Bakhsh FI, Kurukuru VB, Sedighizadeh M. Intelligent energy management scheme-based coordinated control for reducing peak load in grid-connected photovoltaic-powered electric vehicle charging stations. IET Generation Trans Distrib. 2024;18(6):1205–22.
Alam MS. Conceptual framework of a solar PV based high voltage battery charging strategyfor PHEVs and EVs. Am J Electrical Power Energy Syst. 2013;2(6):137–43.
Li H, Son D, Jeong B. Electric vehicle charging scheduling with mobile charging stations. J Clean Prod. 2024;434: 140162.
Khan S, Ahmad A, Ahmad F, Shafaati Shemami M, Saad Alam M, Khateeb S. A comprehensive review on solar powered electric vehicle charging system. Smart Sci. 2018;6(1):54–79.
Nunes P, Figueiredo R, Brito MC. The use of parking lots to solar-charge electric vehicles. Renew Sustain Energy Rev. 2016;66:679–93.
Rehman S, Mohammed AB, Alhems LM, Alsulaiman FA. Smart car parks with EV charging for academic campus. Cleaner Energy Syst. 2024;8: 100121.
Hoth P, Heide L, Grahle A, Göhlich D. Vehicle-integrated photovoltaics—a case study for berlin. World Electric Veh J. 2024;15(3):113.
Min Y, Lee HW, Hurvitz PM. Clean energy justice: different adoption characteristics of underserved communities in rooftop solar and electric vehicle chargers in Seattle. Energy Res Soc Sci. 2023;96: 102931.
Alrubaie AJ, Salem M, Yahya K, Mohamed M, Kamarol M. A comprehensive review of electric vehicle charging stations with solar photovoltaic system considering market, technical requirements, network implications, and future challenges. Sustainability. 2023;15(10):8122.
Tushar W, Yuen C, Huang S, Smith DB, Poor HV. Cost minimization of charging stations with photovoltaics: an approach with EV classification. IEEE Trans Intell Transp Syst. 2015;17(1):156–69.
Yamaguchi M, Nakamura K, Ozaki R, Kojima N, Ohshita Y, Masuda T, Nishioka K. Analysis for the potential of high-efficiency and low-cost vehicle-integrated photovoltaics. Solar RRL. 2023;7(8):2200556.
Keshri R, Bertoluzzo M, Buja G. Integration of a photovoltaic panel with an electric city car. Electric Power Compon Syst. 2014;42(5):481–95.
Kanz O, Reinders A, May J, Ding K. Environmental impacts of integrated photovoltaic modules in light utility electric vehicles. Energies. 2020;13(19):5120.
Birnie DP III. Analysis of energy capture by vehicle solar roofs in conjunction with workplace plug-in charging. Sol Energy. 2016;125:219–26.
Mouli GRC, Schijffelen J, van den Heuvel M, Kardolus M, Bauer P. A 10 kW solar-powered bidirectional EV charger compatible with chademo and COMBO. IEEE Trans Power Electron. 2018;34(2):1082–98.
Monteiro V, Pinto JG, Afonso JL. Experimental validation of a three-port integrated topology to interface electric vehicles and renewables with the electrical grid. IEEE Trans Industr Inf. 2018;14(6):2364–74.
Singh SA, Carli G, Azeez NA, Williamson SS. Modeling, design, control, and implementation of a modified Z-source integrated PV/grid/EV DC charger/inverter. IEEE Trans Industr Electron. 2017;65(6):5213–20.
Chaudhari K, Ukil A, Kumar KN, Manandhar U, Kollimalla SK. Hybrid optimization for economic deployment of ESS in PV-integrated EV charging stations. IEEE Trans Industr Inf. 2017;14(1):106–16.
Zhang Y, You P, Cai L. Optimal charging scheduling by pricing for EV charging station with dual charging modes. IEEE Trans Intell Transp Syst. 2018;20(9):3386–96.
Sortomme E, Hindi MM, MacPherson SJ, Venkata SS. Coordinated charging of plug-in hybrid electric vehicles to minimize distribution system losses. IEEE Trans Smart Grid. 2010;2(1):198–205.
Clement-Nyns K, Haesen E, Driesen J. The impact of charging plug-in hybrid electric vehicles on a residential distribution grid. IEEE Trans Power Syst. 2009;25(1):371–80.
Habib S, Tamoor M, Zaka MA, Jia Y. Assessment and optimization of carport structures for photovoltaic systems: a path to sustainable energy development. Energy Convers Manage. 2023;295: 117617.
Direya R, Khatib T. Simplified python models for photovoltaic-based charging stations for electric vehicles considering technical, economic, and environmental aspects. World Electric Veh J. 2023;14(4):103.
Wallberg A, Flygare C, Waters R, Castellucci V. Peak shaving for electric vehicle charging infrastructure—a case study in a parking garage in uppsala, sweden. World Electric Veh J. 2022;13(8):152.
Zhu R, Kondor D, Cheng C, Zhang X, Santi P, Wong MS, Ratti C. Solar photovoltaic generation for charging shared electric scooters. Appl Energy. 2022;313: 118728.
Atawi IE, Hendawi E, Zaid SA. Analysis and design of a standalone electric vehicle charging station supplied by photovoltaic energy. Processes. 2021;9(7):1246.
Tulpule PJ, Marano V, Yurkovich S, Rizzoni G. Economic and environmental impacts of a PV powered workplace parking garage charging station. Appl Energy. 2013;108:323–32.
Zhu Z, Wang Y, Yuan M, Zhang R, Chen Y, Lou G, Sun Y. Energy saving and carbon reduction schemes for families with the household PV-BES-EV system. Energy Build. 2023;288: 113007.
Bhatti AR, Salam Z, Ashique RH. Electric vehicle charging using photovoltaic based microgrid for remote islands. Energy Procedia. 2016;103:213–8.
Honarmand M, Zakariazadeh A, Jadid S. Self-scheduling of electric vehicles in an intelligent parking lot using stochastic optimization. J Franklin Inst. 2015;352(2):449–67.
Cheikh-Mohamad S, Sechilariu M, Locment F. Real-time power management including an optimization problem for PV-powered electric vehicle charging stations. Appl Sci. 2022;12(9):4323.
Ehsan A, Yang Q. Active distribution system reinforcement planning with EV charging stations—Part I: uncertainty modeling and problem formulation. IEEE Trans Sustain Energy. 2019;11(2):970–8.
Bao Y, Luo Y, Zhang W, Huang M, Wang LY, Jiang J. A bi-level optimization approach to charging load regulation of electric vehicle fast charging stations based on a battery energy storage system. Energies. 2018;11(1):229.
Kádár P, Varga A. PhotoVoltaic EV charge station. In: 2013 IEEE 11th International Symposium on Applied Machine Intelligence and Informatics (SAMI), 2013;pp. 57–60. IEEE.
Huang Q, Yang L, Zhou C, Luo L, Wang P. Pricing and energy management of EV charging station with distributed renewable energy and storage. Energy Rep. 2023;9:289–95.
Muqeet HA, Liaqat R, Jamil M, Khan AA. A state-of-the-art review of smart energy systems and their management in a smart grid environment. Energies. 2023;16(1):472.
Zhang P, Qian K, Zhou C, Stewart BG, Hepburn DM. A methodology for optimization of power systems demand due to electric vehicle charging load. IEEE Trans Power Syst. 2012;27(3):1628–36.
Tamoor M, Tahir MAB, Zaka MA. Photovoltaic integrated distributed energy generation system for sustainable energy development considering reliability indices and levelized cost of energy. Int J Adv Trends Comput Sci Eng. 2021;10(3):2540–9.
Seal S, Boulet B, Dehkordi VR, Bouffard F, Joos G. Centralized MPC for home energy management with EV as mobile energy storage unit. IEEE Trans Sustain Energy. 2023;14(3):1425–35.
Lyu R, Gu Y, Chen Q. Electric vehicle charging right trading: Concept, mechanism, and methodology. IEEE Trans Smart Grid. 2022;13(4):3094–105.
Habib S, Kamran M, Rashid U. Impact analysis of vehicle-to-grid technology and charging strategies of electric vehicles on distribution networks–a review. J Power Sources. 2015;277:205–14.
Koundinya NS, Vignesh S, Narayanan K, Sharma G, Senjyu T. Voltage stability analysis of distribution systems in the presence of electric vehicle charging stations with uncoordinated charging scheme. In: 2020 International Conference on Smart Grids and Energy Systems (SGES), 2020;pp. 303–308. IEEE.
Afshar S, Disfani V, Siano P. A distributed electric vehicle charging scheduling platform considering aggregators coordination. IEEE Access. 2021;9:151294–305.
Hu J, Morais H, Sousa T, Lind M. Electric vehicle fleet management in smart grids: a review of services, optimization and control aspects. Renew Sustain Energy Rev. 2016;56:1207–26.
Bitencourt LDA, Borba BS, Maciel RS, Fortes MZ, Ferreira VH. Optimal EV charging and discharging control considering dynamic pricing. In: 2017 IEEE Manchester PowerTech, 2017;pp. 1–6). IEEE.
Yang Z, Yang F, Min H, Tian H, Hu W, Liu J, Eghbalian N. Energy management programming to reduce distribution network operating costs in the presence of electric vehicles and renewable energy sources. Energy. 2023;263: 125695.
Liu Y, Jian L, Jia Y. Energy management of green charging station integrated with photovoltaics and energy storage system based on electric vehicles classification. Energy Rep. 2023;9:1961–73.
Turker H, Bacha S, Hably A. Rule-based charging of plug-in electric vehicles (PEVs): impacts on the aging rate of low-voltage transformers. IEEE Trans Power Delivery. 2014;29(3):1012–9.
Jin C, Tang J, Ghosh P. Optimizing electric vehicle charging: a customer’s perspective. IEEE Trans Veh Technol. 2013;62(7):2919–27.
Tamoor M, Tahir MAB, Zaka MA. Energy management system for integration of different renewable energy system into microgrids. Int J Adv Trends Comput Sci Eng. 2021;10(2):1234–42.
Sachan S, Deb S, Singh PP, Alam MS, Shariff SM. A comprehensive review of standards and best practices for utility grid integration with electric vehicle charging stations. Wiley Interdiscipl Rev Energy Environ. 2022;11(3): e424.
Liu N, Zou F, Wang L, Wang C, Chen Z, Chen Q. Online energy management of PV-assisted charging station under time-of-use pricing. Electric Power Syst Res. 2016;137:76–85.
García-Triviño P, Torreglosa JP, Fernández-Ramírez LM, Jurado F. Control and operation of power sources in a medium-voltage direct-current microgrid for an electric vehicle fast charging station with a photovoltaic and a battery energy storage system. Energy. 2016;115:38–48.
Locment F, Sechilariu M. Modeling and simulation of DC microgrids for electric vehicle charging stations. Energies. 2015;8(5):4335–56.
Chen C, Duan S. Optimal integration of plug-in hybrid electric vehicles in microgrids. IEEE Trans Industr Inf. 2014;10(3):1917–26.
Goli P, Shireen W. PV powered smart charging station for PHEVs. Renew Energy. 2014;66:280–7.
Zareen N, Mustafa MW. Real-time energy imbalance management scheme for electric vehicles in the smart grid. Indian J Sci Technol. 2015;8(3):1–12.
Ma T, Mohammed OA. Optimal charging of plug-in electric vehicles for a car-park infrastructure. IEEE Trans Ind Appl. 2014;50(4):2323–30.
Yan Z, Gao Z, Navesi RB, Jadidoleslam M, Pirouzi A. Smart distribution network operation based on energy management system considering economic-technical goals of network operator. Energy Rep. 2023;9:4466–77.
Rathor SK, Saxena D. Energy management system for smart grid: an overview and key issues. Int J Energy Res. 2020;44(6):4067–109.
Harsh P, Das D. Optimal coordination strategy of demand response and electric vehicle aggregators for the energy management of reconfigured grid-connected microgrid. Renew Sustain Energy Rev. 2022;160: 112251.
Xiong L, Tang Y, Mao S, Liu H, Meng K, Dong Z, Qian F. A two-level energy management strategy for multi-microgrid systems with interval prediction and reinforcement learning. IEEE Trans Circuits Syst I Regul Pap. 2022;69(4):1788–99.
Kerscher S, Arboleya P. The key role of aggregators in the energy transition under the latest European regulatory framework. Int J Electr Power Energy Syst. 2022;134: 107361.
Zheng Y, Wang Y, Yang Q. Two-phase operation for coordinated charging of electric vehicles in a market environment: from electric vehicle aggregators’ perspective. Renew Sustain Energy Rev. 2023;171: 113006.
Barhagh SS, Mohammadi-Ivatloo B, Anvari-Moghaddam A, Asadi S. Risk-involved participation of electric vehicle aggregator in energy markets with robust decision-making approach. J Clean Prod. 2019;239: 118076.
Li D, Zouma A, Liao JT, Yang HT. An energy management strategy with renewable energy and energy storage system for a large electric vehicle charging station. Etransportation. 2020;6: 100076.
Tookanlou MB, Kani SAP, Marzband M. An optimal day-ahead scheduling framework for E-mobility ecosystem operation with drivers’ preferences. IEEE Trans Power Syst. 2021;36(6):5245–57.
Liu L, Zhou K. Electric vehicle charging scheduling considering urgent demand under different charging modes. Energy. 2022;249: 123714.
Gholami K, Karimi S, Anvari-Moghaddam A. Multi-objective stochastic planning of electric vehicle charging stations in unbalanced distribution networks supported by smart photovoltaic inverters. Sustain Cities Soc. 2022;84: 104029.
Zheng Y, Shao Z, Lei X, Shi Y, Jian L. The economic analysis of electric vehicle aggregators participating in energy and regulation markets considering battery degradation. J Energy Storage. 2022;45: 103770.
ur Rehman U, Riaz M, Wani MY. A robust optimization method for optimizing day-ahead operation of the electric vehicles aggregator. Int J Electr Power Energy Syst. 2021;132: 107179.
Ren H, Zhang A, Wang F, Yan X, Li Y, Duić N, Catalão JP. Optimal scheduling of an EV aggregator for demand response considering triple level benefits of three-parties. Int J Electric Power Energy Syst. 2021;125: 106447.
Liu S, Fang C, Jia S, Xiang Y, Yang J. Hierarchical and distributed optimization of distribution network considering spatial and temporal distribution of electric vehicle charging load. Energy Rep. 2023;9:308–22.
Rautiainen EJM. Optimization Strategies for Electric Vehicle Charging Schedules (Doctoral dissertation, University of Kassel). 2015
Hussain S, Ahmed MA, Lee KB, Kim YC. Fuzzy logic weight based charging scheme for optimal distribution of charging power among electric vehicles in a parking lot. Energies. 2020;13(12):3119.
Rivero E, Mallet P, Stromsather J, Six D, Sebastian-Viana M, Baron M. EVOLVDSO: Assessment of the future roles of DSOs future market architectures and regulatory frameworks for network integration of DRES. In: 23rd International Conference on Electricity Distribution, 2015;No. June, pp. 1–5.
Knezović K, Marinelli M, Zecchino A, Andersen PB, Traeholt C. Supporting involvement of electric vehicles in distribution grids: lowering the barriers for a proactive integration. Energy. 2017;134:458–68.
Gonzalez F, Petit M, Perez Y. Electric Vehicles as Flexibility Providers for Distribution Systems. A Techno-Economic Review. In: 25th International Conference and Exhibition on Electricity Distribution. 2019
Osório GJ, Shafie-khah M, Coimbra PD, Lotfi M, Catalão JP. Distribution system operation with electric vehicle charging schedules and renewable energy resources. Energies. 2018;11(11):3117.
Laureri F, Puliga L, Robba M, Delfino F, Bulto GO. An optimization model for the integration of electric vehicles and smart grids: Problem definition and experimental validation. In: 2016 IEEE International Smart Cities Conference (ISC2), 2016;pp. 1–6. IEEE.
Qian K, Zhou C, Allan M, Yuan Y. Modeling of load demand due to EV battery charging in distribution systems. IEEE Trans Power Syst. 2010;26(2):802–10.
Wu Z, Chen B. Distributed electric vehicle charging scheduling with transactive energy management. Energies. 2021;15(1):163.
Haque A, Kurukuru VSB, Khan MA. Stochastic methods for prediction of charging and discharging power of electric vehicles in vehicle-to-grid environment. IET Power Electronics. 2019;12(13):3510–20.
Asef P, Milan M, Lapthorn A, Padmanaban S. Future trends and aging analysis of battery energy storage systems for electric vehicles. Sustainability. 2021;13(24):13779.
Mansouri SA, Paredes Á, González JM, Aguado JA. A three-layer game theoretic-based strategy for optimal scheduling of microgrids by leveraging a dynamic demand response program designer to unlock the potential of smart buildings and electric vehicle fleets. Appl Energy. 2023;347: 121440.
Blume Y, Mueller M, Jooß N. Effects of variable grid fees on distribution grids with optimized bidirectional battery electric vehicles. In: Proceedings of the 6th Grid Service Markets Symposium (GSM), Luzern, Switzerland, 2022;pp. 4–5.
Kern T, Dossow P, Morlock E. Revenue opportunities by integrating combined vehicle-to-home and vehicle-to-grid applications in smart homes. Appl Energy. 2022;307: 118187.
Huang Y, Wang H, Khajepour A, He H, Ji J. Model predictive control power management strategies for HEVs: a review. J Power Sources. 2017;341:91–106.
Gümrükcü E, Ahmadifar A, Yavuzer A, Ponci F, Monti A. datafev—a Python framework for development and testing of management algorithms for electric vehicle charging infrastructures. Software Impacts. 2023;15: 100467.
Kermani M, Adelmanesh B, Shirdare E, Sima CA, Carnì DL, Martirano L. Intelligent energy management based on SCADA system in a real Microgrid for smart building applications. Renew Energy. 2021;171:1115–27.
Pal P, Parvathy AK, Devabalaji KR, Antony SJ, Ocheme S, Babu TS, Yuvaraj T. IoT-based real time energy management of virtual power plant using PLC for transactive energy framework. IEEE Access. 2021;9:97643–60.
Peng J, He H, Xiong R. Rule based energy management strategy for a series–parallel plug-in hybrid electric bus optimized by dynamic programming. Appl Energy. 2017;185:1633–43.
Xie S, Hu X, Xin Z, Brighton J. Pontryagin’s minimum principle based model predictive control of energy management for a plug-in hybrid electric bus. Appl Energy. 2019;236:893–905.
Mumtaz S, Ali S, Ahmad S, Khan L, Hassan SZ, Kamal T. Energy management and control of plug-in hybrid electric vehicle charging stations in a grid-connected hybrid power system. Energies. 2017;10(11):1923.
Zhang Y, Liu H, Guo Q. Varying-domain optimal management strategy for parallel hybrid electric vehicles. IEEE Trans Veh Technol. 2014;63(2):603–16.
Yang C, Liu K, Jiao X, Wang W, Chen R, You S. An adaptive firework algorithm optimization-based intelligent energy management strategy for plug-in hybrid electric vehicles. Energy. 2022;239: 122120.
Tran DD, Vafaeipour M, El Baghdadi M, Barrero R, Van Mierlo J, Hegazy O. Thorough state-of-the-art analysis of electric and hybrid vehicle powertrains: topologies and integrated energy management strategies. Renew Sustain Energy Rev. 2020;119: 109596.
Shariff SM, Iqbal D, Alam MS, Ahmad F. A state of the art review of electric vehicle to grid (V2G) technology. In: IOP Conference Series: Materials Science and Engineering, 2019;Vol. 561, No. 1;p. 012103. IOP Publishing.
Solanke TU, Ramachandaramurthy VK, Yong JY, Pasupuleti J, Kasinathan P, Rajagopalan A. A review of strategic charging–discharging control of grid-connected electric vehicles. J Energy Storage. 2020;28: 101193.
Yang Z, Li K, Foley A. Computational scheduling methods for integrating plug-in electric vehicles with power systems: a review. Renew Sustain Energy Rev. 2015;51:396–416.
Monica M, Sivakumar P, Isac SJ, Ranjitha K. PMSG based WECS: control techniques, MPPT methods and control strategies for standalone battery integrated system. In: AIP conference proceedings, 2022;Vol. 2405, No. 1. AIP Publishing.
Shaukat N, Khan B, Ali SM, Mehmood CA, Khan J, Farid U, Ullah Z. A survey on electric vehicle transportation within smart grid system. Renew Sustain Energy Rev. 2018;81:1329–49.
Fox GH. Electric vehicle charging stations: are we prepared? IEEE Ind Appl Mag. 2013;19(4):32–8.
Chan CC. The state of the art of electric, hybrid, and fuel cell vehicles. Proc IEEE. 2007;95(4):704–18.
Li S, Mi CC. Wireless power transfer for electric vehicle applications. IEEE J Emerg Select Topics Power Electron. 2014;3(1):4–17.
Ji Chen W. Research of North Pole amphibious vehicle's technologies and Powertrain simulation (Master's thesis, Universitat Politècnica de Catalunya). 2020.
Sulaiman N, Hannan MA, Mohamed A, Majlan EH, Daud WW. A review on energy management system for fuel cell hybrid electric vehicle: Issues and challenges. Renew Sustain Energy Rev. 2015;52:802–14.
Ghosh A. Possibilities and challenges for the inclusion of the electric vehicle (EV) to reduce the carbon footprint in the transport sector: a review. Energies. 2020;13(10):2602.
Yi F, Lu D, Wang X, Pan C, Tao Y, Zhou J, Zhao C. Energy management strategy for hybrid energy storage electric vehicles based on pontryagin’s minimum principle considering battery degradation. Sustainability. 2022;14(3):1214.
Shen Y, Cui P, Wang X, Han X, Wang YX. Variable structure battery-based fuel cell hybrid power system and its incremental fuzzy logic energy management strategy. Int J Hydrogen Energy. 2020;45(21):12130–42.
Mendes PR, Isorna LV, Bordons C, Normey-Rico JE. Energy management of an experimental microgrid coupled to a V2G system. J Power Sources. 2016;327:702–13.
Jiao F, Zou Y, Zhang X, Zhang B. Online optimal dispatch based on combined robust and stochastic model predictive control for a microgrid including EV charging station. Energy. 2022;247: 123220.
Zhang P, Yan F, Du C. A comprehensive analysis of energy management strategies for hybrid electric vehicles based on bibliometrics. Renew Sustain Energy Rev. 2015;48:88–104.
Liang C, Xu X, Wang F, Wang S, Zhou Z. CAN-induced asynchronous random delays-considered mode transition system for DM-PHEV based on constrained output feedback robust control strategy. IEEE Trans Veh Technol. 2022;71(6):5995–6006.
Xiong Q, Quan J, Quan S, Xie J. Research on Energy Management Strategy of Dual Power Electric Vehicle. In: 2017 International Conference on Industrial Informatics-Computing Technology, Intelligent Technology, Industrial Information Integration (ICIICII), 2017;pp. 305–308. IEEE.
Taherzadeh E, Radmanesh H, Mehrizi-Sani A. A comprehensive study of the parameters impacting the fuel economy of plug-in hybrid electric vehicles. IEEE Trans Intell Veh. 2020;5(4):596–615.
Li T, Li X, He T, Zhang Y. An EDA-based Genetic Algorithm for EV Charging Scheduling under Surge Demand. In: 2022 IEEE International Conference on Services Computing (SCC), 2022;pp. 231–238. IEEE.
Mozafar MR, Amini MH, Moradi MH. Innovative appraisement of smart grid operation considering large-scale integration of electric vehicles enabling V2G and G2V systems. Electric Power Syst Res. 2018;154:245–56.
Zhang X, Wang Z, Lu Z. Multi-objective load dispatch for microgrid with electric vehicles using modified gravitational search and particle swarm optimization algorithm. Appl Energy. 2022;306: 118018.
Noorollahi Y, Golshanfard A, Aligholian A, Mohammadi-ivatloo B, Nielsen S, Hajinezhad A. Sustainable energy system planning for an industrial zone by integrating electric vehicles as energy storage. J Energy Storage. 2020;30: 101553.
Sami I, Ullah Z, Salman K, Hussain I, Ali SM, Khan B, Farid U. A bidirectional interactive electric vehicles operation modes: Vehicle-to-grid (V2G) and grid-to-vehicle (G2V) variations within smart grid. In: 2019 international conference on engineering and emerging technologies (ICEET), 2019;pp. 1–6. IEEE.
Ma Y, Li J. Iterative dynamic programming strategy for electric vehicle battery thermal management optimization. Adv Theory Simulations. 2022;5(7):2100602.
Badawy MO, Sozer Y. Power flow management of a grid tied PV-battery system for electric vehicles charging. IEEE Trans Ind Appl. 2016;53(2):1347–57.
Khatib T, Muhsen DH. Optimal sizing of standalone photovoltaic system using improved performance model and optimization algorithm. Sustainability. 2020;12(6):2233.
Rahman I, Vasant PM, Singh BSM, Abdullah-Al-Wadud M. Novel metaheuristic optimization strategies for plug-in hybrid electric vehicles: a holistic review. Intell Decision Technol. 2016;10(2):149–63.
Eberhart R, Kennedy J. A new optimizer using particle swarm theory. In: MHS'95. Proceedings of the sixth international symposium on micro machine and human science, 1995;pp. 39–43. IEEE.
Maleki A, Ameri M, Keynia F. Scrutiny of multifarious particle swarm optimization for finding the optimal size of a PV/wind/battery hybrid system. Renew Energy. 2015;80:552–63.
Panda A, Mishra MK. Power management of hybrid storage using rule based adaptive filtering in electric vehicle. In: 2022 IEEE International Conference on Power Electronics, Smart Grid, and Renewable Energy (PESGRE), 2022;pp. 1–6. IEEE.
Salem ME, Mohamed A, Samad SA. Rule based system for power quality disturbance classification incorporating S-transform features. Expert Syst Appl. 2010;37(4):3229–35.
Hota AR, Juvvanapudi M, Bajpai P. Issues and solution approaches in PHEV integration to smart grid. Renew Sustain Energy Rev. 2014;30:217–29.
Mahmud K, Town GE, Morsalin S, Hossain MJ. Integration of electric vehicles and management in the internet of energy. Renew Sustain Energy Rev. 2018;82:4179–203.
Singh KV, Bansal HO, Singh D. Fuzzy logic and Elman neural network tuned energy management strategies for a power-split HEVs. Energy. 2021;225: 120152.
Sousa TJ, Monteiro V, Fernandes JA, Couto C, Meléndez AAN, Afonso JL. New perspectives for vehicle-to-vehicle (V2V) power transfer. In: IECON 2018–44th Annual Conference of the IEEE Industrial Electronics Society, 2018;pp. 5183–5188. IEEE.
Popović V, Dragan D, Jereb B. Electric Vehicles as an Electricity Storage in Electricity Supply Chain. In: 3rd Internation logistics Conferrence LOGIC 2017. 2017.
Giordani M, Zanella A, Higuchi T, Altintas O, Zorzi M. Performance study of LTE and mmWave in vehicle-to-network communications. In: 2018 17th Annual Mediterranean Ad Hoc Networking Workshop (Med-Hoc-Net), 2018;pp. 1–7. IEEE.
Mouli GRC, Venugopal P, Bauer P. Future of electric vehicle charging. In: 2017 International Symposium on Power Electronics (Ee), 2017;pp. 1–7. IEEE.
Thompson AW. Economic implications of lithium ion battery degradation for Vehicle-to-Grid (V2X) services. J Power Sources. 2018;396:691–709.
Pearre NS, Ribberink H. Review of research on V2X technologies, strategies, and operations. Renew Sustain Energy Rev. 2019;105:61–70.
Uddin K, Dubarry M, Glick MB. The viability of vehicle-to-grid operations from a battery technology and policy perspective. Energy Policy. 2018;113:342–7.
Wirasingha SG, Emadi A. Classification and review of control strategies for plug-in hybrid electric vehicles. IEEE Trans Veh Technol. 2010;60(1):111–22.
Liu N, Chen Q, Liu J, Lu X, Li P, Lei J, Zhang J. A heuristic operation strategy for commercial building microgrids containing EVs and PV system. IEEE Trans Industr Electron. 2014;62(4):2560–70.
Lesiuta EJ. Optimization of a hybrid energy storage system for electric vehicles using machine learning methods (Master's thesis, University of Windsor (Canada)). 2016.
Trovão JP, Pereirinha PG, Jorge HM, Antunes CH. A multi-level energy management system for multi-source electric vehicles–an integrated rule-based meta-heuristic approach. Appl Energy. 2013;105:304–18.
Shen KY, Tzeng GH. A decision rule-based soft computing model for supporting financial performance improvement of the banking industry. Soft Comput. 2015;19:859–74.
Chanak P, Banerjee I. Fuzzy rule-based faulty node classification and management scheme for large scale wireless sensor networks. Expert Syst Appl. 2016;45:307–21.
Mousavi SM, Abdullah S, Niaki STA, Banihashemi S. An intelligent hybrid classification algorithm integrating fuzzy rule-based extraction and harmony search optimization: medical diagnosis applications. Knowl-Based Syst. 2021;220: 106943.
Kalibatiene D, Vasilecas O, Savickas T, Vysockis T, Bobrovs V. A new approach on rule and context based dynamic business process simulation. Baltic J Modern Comput. 2016;4(3):408.
Kluegl P, Toepfer M, Beck PD, Fette G, Puppe F. UIMA Ruta: Rapid development of rule-based information extraction applications. Nat Lang Eng. 2016;22(1):1–40.
Chen Y, Zhang X, Wu C, Li G. Field-road trajectory segmentation for agricultural machinery based on direction distribution. Comput Electron Agric. 2021;186: 106180.
Iqbal A, Zhang HC, Kong LL, Hussain G. A rule-based system for trade-off among energy consumption, tool life, and productivity in machining process. J Intell Manuf. 2015;26:1217–32.
Huang T, Liu D. A self-learning scheme for residential energy system control and management. Neural Comput Appl. 2013;22(2):259–69.
Tie SF, Tan CW. A review of energy sources and energy management system in electric vehicles. Renew Sustain Energy Rev. 2013;20:82–102.
Schäuble J, Kaschub T, Ensslen A, Jochem P, Fichtner W. Generating electric vehicle load profiles from empirical data of three EV fleets in Southwest Germany. J Clean Prod. 2017;150:253–66.
Wang S, Crosier R, Chu Y. Investigating the power architectures and circuit topologies for megawatt superfast electric vehicle charging stations with enhanced grid support functionality. In: 2012 IEEE international electric vehicle conference, 2012;pp. 1–8. IEEE.
Pinto JG, Monteiro V, Exposto B, Barros LA, SousaTJ, Monteiro LF, Afonso JL. Power electronics converters for an electric vehicle fast charging station with storage capability. In: Green Energy and Networking: 5th EAI International Conference, GreeNets 2018, Guimarães, Portugal, November 21–23, 2018, Proceedings 5, 2019;pp. 119–130. Springer International Publishing.
Lahooti Eshkevari A, Mosallanejad A, Sepasian M. In-depth study of the application of solid-state transformer in design of high-power electric vehicle charging stations. IET Electrical Syst Trans. 2020;10(3):310–9.
Safayatullah M, Elrais MT, Ghosh S, Rezaii R, Batarseh I. A comprehensive review of power converter topologies and control methods for electric vehicle fast charging applications. IEEE Access. 2022;10:40753–93.
Vasiladiotis M, Rufer A. A modular multiport power electronic transformer with integrated split battery energy storage for versatile ultrafast EV charging stations. IEEE Trans Industr Electron. 2014;62(5):3213–22.
Li X, Tan Y, Liu X, Liao Q, Sun B, Cao G, Wang Z. A cost-benefit analysis of V2G electric vehicles supporting peak shaving in Shanghai. Electric Power Syst Res. 2020;179: 106058.
Deb S, Al Ammar EA, AlRajhi H, Alsaidan I, Shariff SM. V2G pilot projects: review and lessons learnt. Dev Charg Infrastruct Technol Electric Veh. 2022. https://doi.org/10.4018/978-1-7998-6858-3.ch014.
Dik A, Omer S, Boukhanouf R. Electric vehicles: V2G for rapid, safe, and green EV penetration. Energies. 2022;15(3):803.
Wang M, Craig MT. The value of vehicle-to-grid in a decarbonizing California grid. J Power Sources. 2021;513: 230472.
Guo J, Yang J, Ivry P. Development of an intelligent control platform for vehicle-to-grid systems. In: 2020 9th International Conference on Renewable Energy Research and Application (ICRERA), 2020;pp. 83–87. IEEE.
Vella H. Electric vehicles charging back [From electric school buses to Nissan Leafs, can vehicle-to-grid technology accelerate the clean-energy revolution?]. Eng Technol. 2020;15(7):32–7.
Kester J, Noel L, de Rubens GZ, Sovacool BK. Promoting Vehicle to Grid (V2G) in the Nordic region: expert advice on policy mechanisms for accelerated diffusion. Energy Policy. 2018;116:422–32.
Alves M, Segurado R, Costa M. On the road to 100% renewable energy systems in isolated islands. Energy. 2020;198: 117321.
Funding
The authors declare no funding available to support this research work.
Author information
Authors and Affiliations
Contributions
A.R.B., M.T. and R.L. identified the problem, investigated and did the preliminary analysis. A.R.B., A.R., Z.S. and A. A. did the comprehensive analysis and validated results. A.R.B. and M.T. wrote the main manuscript text. M.T., R.L. and A.S. prepared figures and tables. All authors have contributed and reviewed the manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Bhatti, A.R., Tamoor, M., Liaqat, R. et al. Electric vehicle charging stations and the employed energy management schemes: a classification based comparative survey. Discov Appl Sci 6, 503 (2024). https://doi.org/10.1007/s42452-024-06190-9
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s42452-024-06190-9