
Abstract
Purpose
This paper presents the sensitivity analysis (SA) of the random natural frequency responses of hybrid multi-functionally graded sandwich (HMGS) shells for establishing a unified measure in the case of multi-objective performances. The functionally graded materials, laminated composites, and sandwich cores are employed to develop such novel structures to tailor the benefits of each component in a single structure.
Methods
A novel MARS-based sensitivity analysis of these hybrid multi-functionally graded sandwich shells is developed to achieve computational efficiency without compromising with the outcome. Such surrogate-assisted FE approaches are crucial for computationally intensive multi-objective systems. The basic governing equations of random natural frequency are framed based on finite element formulation. The variabilities of major influencing random input parameters (here, geometric and material properties) are carried out by employing Monte Carlo simulation (MCS). The multivariate adaptive regression spline (MARS) is adopted as a surrogate model to increase computational efficiency.
Results and Conclusion
The results are portrayed to showcase the significant effects of variable input parameters (sensitivity) on random frequency responses of such novel HMGS shells. Hence, it provides the predominant random input parameters and their relative degree of importance while designing such multi-dimensional structural systems. Thus, the contribution of this article lies in both the development of a computationally efficient sensitivity analysis approach and the insightful numerical results for hybrid structures presented thereafter. The comprehensive and collective sensitivity quantification considering multi-functional objectives, as presented in this article, would lead to efficient computational modelling of complex structural systems for more optimized designs and better quality control during manufacturing.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
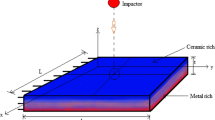
Sandwich structures are exhaustively employed in spacecraft, civil structures, high-speed transportations, and automotive industries [1, 2] due to their tailored multi-functional features. In general, the sandwich structure construction comprises three parts: upper facesheet, lower facesheet, and middle core. The facesheets consist of a laminated composite structure having excessive stiffness and strength, and the core is made of foam [3] structure with low density to impart low weight. These structures have high energy absorption and impact resistance [4,5,6]. The functionally graded materials (FGM) are composed of two main constitutes, namely ceramic and metal. In FGM, one free surface is metal-rich, providing high strength and stiffness to the structure. In contrast, the other free surface is ceramic-rich, providing sustainability to its strength at elevated temperature and resistance to corrosion. Due to limitations in sandwich structures such as low temperature-resistant and corrosion-resistant properties, its facesheet can be replaced by functionally graded materials (FGM) instead of laminated composites. Therefore, combining both sandwich and functionally graded structures, the hybrid multi-functionally graded sandwich (HMGS) shell is idealised in the present study, exhibiting the novelty of superiority and tailoring in properties.
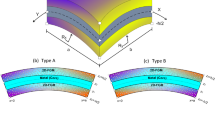
In the past, studies related to such structures were conducted by Tung [7] for the post-buckling, bending, and buckling behaviour of these FG-sandwich plates. The finite element method (FEM) is incorporated to design FG-sandwich plates by employing shear deformation theories [8]. Later on, some researchers [9,10,11,12,13,14] developed various computational models for dynamic characteristics of hybrid functionally graded (FG)-sandwich structure. On referring to these works of literature, generalised observations are obtained. First, advanced computational methods are primarily required for analysing these hybrid FG-sandwich structures. Second, these hybrid structures are employed in advanced applications, and third, it performs better than the conventional sandwich structures. Therefore, the present study focuses on a computational framework for mapping triggering parameter sensitivity (both geometric and material properties). Hence, a novel functional class of HMGS shells is considered for random free vibration. In the present study, six cases are categorised to analyse these hybrid structures as described in Table 1 and furnished in Fig. 1.

Geometric configurations of HMGS shells: a cylindrical (Scyl.), b spherical (Ssph.), c elliptical paraboloid (Sell.), and d hyperbolic paraboloid (Shyp.) and e, f shell model
In aerospace, civil construction, naval, and automobile sectors, hybrid FG shell-type structures play a vital role. But while using shell-type forms, it is challenging to maintain the standard, as they often lead to non-conformity from their deterministic design specification. In addition, the manufacturing processes of these HMGS structures are pretty complicated due to multiple sources of uncertainties. The overall responses have notable stochastic variations because of these uncontrollable fluctuations (material properties and geometric variation). Therefore, adopting such methods is essential to design safe and reliable hybrid structures. Therefore, it is critically needed to consider these uncertainties by promoting an exclusive method for analysing such structures. Hence, the present study is aimed to investigate the sensitivity of elliptical paraboloid, cylindrical, hyperbolic paraboloid, and spherical-shaped HMGS shells (Fig. 2) towards their stochastic dynamic responses.

Six cases of hybrid multi-functionally graded sandwich (HMGS) structures
Many researchers worked on a deterministic approach for dynamic analyses of plate and shell structures [15,16,17,18]. An analytical study is performed for the dynamic response of sandwich structures under blast loading [19]. Cui et al. [20] and Zhu et al. [21] worked on sandwich plates having square geometry to find the analytical solution for the dynamic response using the energy balance method. Under blast loading, dynamic responses are studied on rectangular sandwich plates [22, 23]. Dharmasena et al. [24] worked on metal honeycomb sandwich structures under the influence of explosive loading. They observed that the small impulse causes the bending of the plate near the load, and the core gradually buckle. Cui et al. [25] and Zhu et al. [26] worked on a honeycomb sandwich structure with a tetrahedral lattice structured core. The obtained results illustrate that tetrahedral design portrays better impact resistance than the hexagonal sandwich core. Jamil et al. [27] worked on Al-thermoplastic polyurethane sandwich structures and found that the structure executed better blast resistance by adding thermoplastic polyurethane. Reyes [28] applied the energy balance approach to study the impact behaviour of the sandwich structure having thermoplastic fiber–metal laminated facesheet and Al-based core. The result indicates that the residual flexural strength is increased significantly. Low-velocity impact behaviour of sandwich structure having Al-core and glass fiber reinforced polypropylene-fiber–metal laminated facesheet is investigated [29]. Liu et al. [30, 31] worked on an Al-based core and fibre-metal laminated facesheet, wherein low-velocity impact response is studied and then switched to high-velocity impact response. Basturk et al. [32] studied the dynamic response of fiber–metal laminated Al-based core sandwich plate. Six porous models were considered to analyse the wave propagation of a ceramic–metal functionally graded sandwich plate. It was found that fluctuation in hygro-thermal stresses and moisture content plays an important role [33]. Similarly, three different orientations of sandwich beams were considered to analyse the natural frequencies of an FG material. The layup schemes and thickness ratio of skin–core-skin have vital importance in evaluating the non-dimensional natural frequencies [34]. An optimised shear deformation theory was developed for sandwich structures with FG facesheet and FG hardcore [35]. A square sandwich plate was considered to analyse the free vibration of a porous FG material. A varied boundary condition was presented to investigate the effects of porosity in volume fraction, lay-up configuration, and thickness ratio [36]. On the same note, a variation in moisture and temperature was conducted to analyse the free vibration of the FG-sandwich plate. The results show that the damping coefficient is directly proportional to the free vibration of the material [37]. A reliable design was proposed to analyse the thermo-mechanical properties of FG steel incorporating Fourier series expansion and the Galerkin method [38]. Similarly, free vibrational analyses of FG conical shell panels suggested that thickness and boundary conditions have significant effects. A mesh-free Ritz method was employed to perform the analysis [39]. An analytical approach based on Fourier series and Laplace transformation is incorporated to analyse FG piezoelectric cylindrical panels [40]. The hygro-thermal and mechanical behaviour was analysed for FG ceramic plate to investigate the effects of moisture, temperature, and damping coefficients [41]. A bending analysis was performed utilising higher-order shear deformation theory, and a Navier-type solution was obtained under transverse loading conditions [42]. Buckling and free vibration analyses were carried out for functionally graded carbon nanotube-reinforced quadrilateral and skew laminates [45]. Detailed numerical results were obtained by the discrete singular convolution method. An alteration in the weight fraction of carbon nanotubes was considered to analyse the static stability analysis of carbon nanotube reinforced polymeric composite [48]. An imperfect porous FG plate was considered to analyse the free vibrational response, considering the cut-out effect, geometric variation, and volume fraction [49]. More work on functionally graded structures is presented in various literature [37, 43,44,45,46,47, 50,51,52,53]. The literature mentioned above summarised that extensive work on sandwich and FGM structure is carried out. But, the studies on the dynamic response of hybrid structures are limited. In a real-life situation, the sources of uncertainty should be considered for the reliability and safety of these structures. Monte Carlo simulation (MCS) is one of the most preferred approaches for probabilistic modelling. This technique's effectiveness lies in how the random numbers are generated from the pseudo-random number generator. The limitation of this technique is high computational cost and time. MCS is quite an expensive process; the quality of uncertainty prediction directly depends on the number of simulations. Therefore, surrogate models are integrated with the MCS technique to overcome this problem and the computationally efficient overall process. Some literature [54,55,56,57,58,59,60,61] showcased utilising MCS and MARS in the stochastic domain to analyse the natural frequency of FGM cantilever plates at different temperatures. For the present study, MARS is integrated with the finite element framework.
In the past, the sensitivity analysis is linked with the material properties and geometric shape and size [62,63,64,65,66,67,68,69,70,71,72,73]. Many researchers focussed on sensitivity analysis while considering buckling, statics, and transient response problems. In the deterministic regime, sensitivity analysis involved two methods, namely, variational and implicit differentiation [74, 75]. The variational method requires differentiation of the structural response continuum governing equations. Still, this method cannot be applied under challenging problems, while the implicit differentiation method involves the derivation of the discrete formulations of the FE method. Therefore, the latter method became more popular. Later on, the sensitivity analysis is further classified into two parts, namely, local sensitivity and global sensitivity, respectively. The local sensitivity is computed based on the derivate of the response function, while the global sensitivity considers the overall response behaviour. Therefore, it is evident that local sensitivity is more accessible to compute than global sensitivity. The only disadvantage is that it considers sensitivity concerning the base point, which is less critical. The global sensitivity analysis is preferred for determining the overall response behaviour; it deals with system stochasticity. But there are some limitations to these global sensitivity analyses as they require extensive function evaluations; therefore, it becomes computationally expensive and requires enormous time and cost. Surrogate-based global sensitivity is adapted to overcome these limitations. This method aims to make the process computationally efficient by reducing expensive simulations. Hamdia et al. [76].
Hamdia et al. [76] worked on flexo-electric material for sensitivity analysis. Three surrogate models are employed: extended Fourier amplitude, PCE-Sobol, and Morris One-At-a-Time model. Antonio and Hoffbauer [77] performed reliability and sensitivity analysis of composite structures, determining random input parameter’s effect by utilising ANN integrated with MCS. Zhang et al. [78] worked on composite beam damage detection and performed a sensitivity analysis to analyse noise's effect. Sensitivity analysis is adapted on laminated composites utilising the topological derivative mapping method to obtain optimal design [79]. Bishay and Sofi [80] performed sensitivity analysis on composites to construct robotic fingers. A comparative study of variance moment independent based method is conducted by Zadeh et al. [81], whereas Zhao and Bu [82] worked on global sensitivity analysis considering hierarchical sparse meta-modelling approach. Vu-Bac et al. [83] developed software to analyse the probabilistic sensitivity for computationally expensive models.
The earlier discussion concludes that most studies related to the dynamic analysis of hybrid structures are carried out in a deterministic framework. In real-life situations, various uncertainties are involved in every system, which is unavoidable. These uncertainties can be material properties and geometric uncertainties, environmental uncertainties. Therefore, for the safety and reliability of the system, these uncertainties should not be neglected. The stochastic dynamic analysis in the case of hybrid FG-sandwich structure is scarce in past literature. The manufacturing of these hybrid structures is quite complex; in addition to it, the shell-type construction adds to its complexity. Therefore, there is a great chance that the designed structure will contain deviation from the initial design specification. The stochastic study plays great importance as it considers these uncertainties while carrying out the analysis, making the study more reliable. The present study includes the sensitivity analysis in conjunction with random frequency responses of HMGS shells considering various shell geometries and various cases (based on the construction of a hybrid structure). The sensitivity analysis of such structures for dynamic analysis considering traditional MCS is computationally expensive. The MARS model is constructed and integrated with the finite element framework to avoid it. With this analysis, the relative effects of individual material and geometric properties are portrayed in the light of the structure's uncertain global frequency response. There lie two novelties in the present work. This is the first attempt to incorporate MARS with the efficient MCS for stochastic dynamic analysis of HMGS shells. As discussed earlier that MCS is quite an exhaustive process, requiring excessive time and cost. Therefore, implementing the surrogate (here, MARS) with the FE model makes the process computationally efficient. This surrogate-based approach enhances efficiency when dealing with a complex and realistic system. To the best of the authors' knowledge, this is the first attempt to perform the sensitivity analysis of HMGS shells with different geometries and structural forms. From the earlier discussion, it is known that manufacturing these HMGS structures is pretty complicated, involving multiple sources of uncertainty. Because of these uncontrollable fluctuations (material properties and geometric variation), there is a notable amount of stochastic variation in the system's overall response. Therefore, adopting such methods is essential to design a safe and reliable structure. Therefore, it is critical to consider these uncertainties and have an exclusive method for analysing such structures. Such detailed, exhaustive studies are needed while designing such structures.
Theoretical Formulation
The present study deals with hybrid multi-functionally graded sandwich (HMGS) shells with cantilever boundary conditions. The different shell geometries are considered, such as spherical, hyperbolic paraboloid, cylindrical, and elliptical paraboloid geometries (Fig. 1 and Table 1). Six different cases of HMGS (Fig. 2 and Table 2) are considered for the sensitivity analysis in conjunction with random frequency responses.
Governing Equation
To obtain the material properties FGM sheet, power-law [84, 85] is employed, and the same is expressed as,
where n represents the power-law index, A represents the various material properties. Here, \(A_{{\text{m}}}\) indicate the properties of metal while \(A_{{\text{c}}}\) shows the properties of ceramics. In the above equation, h represents the thickness/depth of the FGM plate, whereas \(z = {\raise0.7ex\hbox{${ - t}$} \!\mathord{\left/ {\vphantom {{ - t} 2}}\right.\kern-\nulldelimiterspace} \!\lower0.7ex\hbox{$2$}}\) and \(z = {\raise0.7ex\hbox{$t$} \!\mathord{\left/ {\vphantom {t 2}}\right.\kern-\nulldelimiterspace} \!\lower0.7ex\hbox{$2$}}\) indicates the upper and lower layer of the plate, and x represents the power-law exponent. Here, the temperature-dependent material properties are expressed as [86],
where T represents the temperature value in Kelvin and \(A_{0}\),\(A_{ - 1}\),\(A_{1}\),\(A_{2}\) and \(A_{3}\) are the values of temperature coefficients. According to the first-order shear deformation theory, the following Eqs. (3), (4), and (5) are employed to represent the displacement field as,
where the stochastic displacement in x, y, and z-direction is represented by \(a(\varpi )\), \(b(\varpi )\) and \(c(\varpi )\), respectively, and the stochastic displacement at mid-plane in x, y, and z-direction is represented by \(a_{0} (\varpi )\), \(b_{0} (\varpi )\) and \(c_{0} (\varpi )\) respectively, whereas rotation in the direction of x and y direction is represented by \({\mathcal{R}}_{x} (\varpi )\) and \({\mathcal{R}}_{y} (\varpi )\) respectively. The symbol ‘\((\varpi )\)’ represents the degree of stochasticity in the respective input parameters. The generalized stochastic dynamic equilibrium equation [9] can be expressed as,
where \(\left\{ {{\mathbf{u}}(\varpi )} \right\}\) is the global displacement vector, \([m(\varpi )]\) is the global mass matrix, \([{\mathbf{c}}(\varpi )]\) is the global damping matrix, \([{\mathbf{k}}(\varpi )]\) represent the global stiffness matrices, while \(\left\{ {{\mathbf{f}}(\varpi )} \right\}\) is an external force vector. Considering free vibration, the above equation can be reduced as,
The static components, as well as time-dependent components, are considered for dynamic analysis. Here, the displacement vector \(\left\{ {{\mathbf{u}}({\varpi })} \right\}\) contains both static and a dynamic term \(\left[ {\left\{ {{\mathbf{u}}(\varpi )} \right\} = \left\{ {{\mathbf{u}}_{s} (\varpi )} \right\} + \left\{ {{\mathbf{u}}_{p} (\varpi )} \right\}} \right]\), where \(\left\{ {{\mathbf{u}}_{p} ({\varpi })} \right\}\) is a minor linear time reliant perturbation about \(\left\{ {{\mathbf{u}}_{s} ({\varpi })} \right\}\), while \(\left\{ {{\mathbf{u}}_{s} ({\varpi })} \right\}\) is expressed as the static displaced position. The equation of motion can be stated as,
Neglecting \(\left\{ {u_{{\text{s}}} (\varpi )} \right\}\), the equation of motion for free vibration can be expressed as,
In Eq. (9), the displacement \(\left\{ {u_{{\text{p}}} (\varpi )} \right\}\) is a function of time and space. In free vibration analysis, the time and space coordinates of displacement function can be expressed as,
On substituting the values of \(\left\{ {{\mathbf{u}}_{{\text{p}}} ({\varpi })} \right\}\) and \(\left\{ {{\mathbf{\ddot{u}}}_{{\text{p}}} ({\varpi })} \right\}\) in Eq. (9), the modified equation is
As \({\mathbf{{\rm A}^{\prime}}}e^{i\omega t} \ne 0\)
Here, \(\omega\) imply natural frequencies. Now, utilising the standard eigenvalue problem [62], ω can be evaluated. QR iteration algorithm is employed to solve the equations. Now, Eq. (13) is further transformed as,
Finite Element Formulation
The finite element formulation of the hybrid shell is designed considering a bending element (eight noded) of an isoperimetric quadratic structure. Each node has (three translational and two rotational) five degrees of freedom. Polynomial shape functions with coordinates \(\xi ,\,\,\eta {\text{ and }}\,\zeta\) depict the displacement relation between the nodal values and the generalised equation. The interpolation polynomial function is stated as
where \(F_{0} ,F_{1} ,.........F_{7}\) are the degrees of freedom.
The shape functions \(S_{i}\) can be shown as:
The shape functions accuracy is given by
The bending formulation by utilising the same shape functions for the coordinates (x,y) is stated as
The displacement at any point can be shown as (Fig. 3)

Discretization model for hybrid sandwich plate (mesh size 8 × 8)
Sensitivity Analysis
Sensitivity analysis (SA) describes the effect of each input parameter and their combined effects on the output responses. The relationship between input and output parameters for a constructed model can be defined as [88]
where Yi are the random input variables, by fixing Yi to be \(y_{i}^{*}\) one at a time, the conditional variance of the output \({\text{Var}}({\mathbf{Z|Y}}_{{\mathbf{i}}} {\mathbf{ = y}}_{i}^{*} )\) is generally less than the total variance \({\text{Var}}({\mathbf{Z}})\), indicating some contribution of variance from the input variable Yi. It states the sensitivity of uncertain output concerning Yi (input). For all possible values of \({\mathbf{y}}_{i}^{*}\), the variable \({\text{Var}}({\mathbf{Z|Y}}_{{\mathbf{i}}} {\mathbf{ = y}}_{i}^{*} )\) is a random variable. Thus, we can calculate its expected value \({\mathbf{\rm E}}[{\text{Var}}({\mathbf{Z|Y}}_{i} )]\). To quantify the importance of Yi (input), one can determine it from a deterministic value \({\text{Var}}({\mathbf{Z}}) - {\mathbf{\rm E}}[{\text{Var}}({\mathbf{Z|Y}}_{i} )]\). Likewise, for all expected values of Yi(input), the conditional expectation is \({\mathbf{\rm E}}[{\text{Var}}({\mathbf{Z|Y}}_{{\mathbf{i}}} )]\) which is also a random variable. Therefore, the contribution of Yi (input) can be depicted by \({\text{Var}}({\mathbf{Z}}) - {\text{Var}}({\mathbf{{\rm E}[Z|Y}}_{i} ])\) as
To quantify the sensitivity of output related to the uncertainty of the ith input, using Sobol' sensitivity index [67, 68, 89, 90]
The higher order sensitivity indices predict the interconnection between input variables. Let Yi and Yj are two variables that are taken constantly simultaneously at a time. The combined effect of these two can be measured by \({\text{Var}}({\rm E}[{\mathbf{Z|Y}}_{{\mathbf{i}}} {\mathbf{,Y}}_{j} ])\). The second-order indices are expressed as,
Similarly, the equations are derived for higher order indices. Therefore, in general, the total variance can be depicted as
where \({\mathbf{V}}_{i} = {\text{Var}}({\mathbf{\rm E}}[{\mathbf{Z|Y}}_{i} ])\),
\({\mathbf{V}}_{ij} = Var({\mathbf{\rm E}}[{\mathbf{Z|Y}}_{{\mathbf{i}}} {\mathbf{,Y}}_{j} ]) - {\mathbf{V}}_{i} - {\mathbf{V}}_{j}\),
\({\mathbf{V}}_{ijk} = {\text{Var}}({\mathbf{\rm E}}[{\mathbf{Z|Y}}_{{\mathbf{i}}} {\mathbf{,Y}}_{{\mathbf{j}}} {\mathbf{,Y}}_{k} ]) - {\mathbf{V}}_{ij} - {\mathbf{V}}_{jk} - {\mathbf{V}}_{ik} - {\mathbf{V}}_{i} - {\mathbf{V}}_{{\mathbf{j}}} - {\mathbf{V}}_{k}\), etc.
Therefore,
For measuring the total effect of all input variables, the total effect index is utilised [91], as shown in Eq. (28)
The advantage of SA includes that it provides fine-grained information on individual and compound effects of input variables. The limitation of SA is linked with Monte Carlo, wherein it is a computationally exhaustive process requiring time and cost. MARS is utilised as a surrogate model in the present study to overcome this limitation.
Multivariate Adaptive Regression Splines (MARS)
The finite element modelling (in the case of computationally intensive simulation of repetitive nature) [55, 95,96,97,98,99,100,101] can be an alternate way where inefficient analytical solutions [92,93,94] are not possible. The surrogate modelling technique is employed in such intensive simulations to achieve computational efficiency. In the case of MARS relationship between input/output responses of the system is achieved by selecting samples based on some algorithms [102,103,104]. Instead of assuming the functional relationship between dependent and independent variables, here, essential function and set of coefficients are used to develop the times extracted from regression data. By employing MARS, significant dimensional input parameters problems can be obtained, otherwise difficult to solve. The forward and backward approach selects a set of basic functions for approximating the output response. Following steps are employed in MARS-based surrogate approach: step 1: initialisation with a simple model with constant basic function, step 2: addition of the basic functions thereby increasing complexity, step 3: checking with the pre-defined complexity, step 4: using backward approach, remove insignificant basic functions. The basic function of MARS [105] can be expressed as,
The approximation function is represented by \(f(x)\). \(\alpha_{i}\) represents the coefficients of expansion, whereas the multivariate spline basic functions are denoted by \(Z_{i}^{x} (y_{n} )\). For dividing input space into J number of regions, the Eq. (29) becomes
where \({\mathbf{Z}}_{i}^{x} ({\mathbf{y}}_{{\mathbf{1}}} {\mathbf{,y}}_{{\mathbf{2}}} {\mathbf{,y}}_{{\mathbf{3}}} {\mathbf{,}} \ldots ,{\mathbf{y}}_{J} ) = 1\) for i = 1. In Eq. (30), the term \(\alpha_{{_{1} }}^{{}}\) is the intercept parameter. The basic function can be expressed as,
where \(n_{i}\) represents the interaction order,\(K_{{n_{i} }} = \pm 1\),\(y_{m(n,i)}\) denotes the mth variable,\(1 \le m(n,i) \le j\), and \(Q_{n,i}\) represents the knot location of corresponding variables. The dimension of input variables is defined by j, superscript x denotes the function, and l denotes the spline's order. The function \(f(x)\) contains all the basic functions of ith sub-regions, while the multivariate spline basic function \({\mathbf{Z}}_{i}^{x} ({\mathbf{y}}_{n} )\) contains univariate spline basic function and \(K_{n,i}\). 'Pr' represents the function as a truncated power function. The basic function may be in the following shapes
Thus, all basic functions are expressed as
Stepwise linear regression is employed for forward propagation, but instead of using original input, it uses the function E and their product. For estimating \({{\varvec{\upalpha}}}_{i}\), the residual sum-of-square is minimised. Both forward and backward approaches are employed in MARS to determine the number of basic spline functions and their location. First, the basic spline function is over-fitted at each knot, then for removing insignificant knot, the modified cross-validation criteria are employed [106, 107].
The model uses a modified kind of criterion known as generalised cross-validation (GCV) to automatically screen the variables. For the appropriate spline basis functions, MARS picks the exact value and location of the given element in an onward or backward way. It over-fits the spline function to the defined knot's position. After that, using the generalised cross-validation criterion, the model removes the unneeded knots that contribute the least to the model. The knots that are not needed can be assessed using the lack-of-fit (Z) criterion, which is represented as
where \(\widetilde{c}\left(\widetilde{k}\right)=c\left(\widetilde{k}\right)+C.\left(\widetilde{k}\right)\)
'h' represents the total number of samples, \(c\left(\widetilde{k}\right)\)' represents the number of linearly independent basis functions, '\(\widetilde{k}\)' represents the number of knots in the forward process, 'Y' represents the approximated function, and 'C' represents the basis function cost. The smoothness of the function is estimated by the cost function's value. Because 'C' is inversely proportional to the number of knots, when '\(\widetilde{k}\)' is small, C is big, which results in a smooth estimation of the function.
The constructed metamodel is further validated by analysing the relative accuracy and the coefficient of determination (R2) of the individual model. The formulation of the coefficient of determination is stated as
Here, \({y}_{i},\)\(\mathop {y_{i} }\limits^{{\vartriangle }}\) and \({\overline{y} }_{i}\) signifies the actual model, predicted model and mean of actual data. In Eq. (57), it is assumed that all the parameters are influential in evaluating the model's efficiency. The relative accuracy of the model is evaluated as
\({\mathbf{J(x)}}_{{\mathrm{actual}}}\) and \({\mathbf{J(x)}}_{{\mathrm{predicted}}}\) are the FE response and corresponding predicted response of the MARS model, respectively. The current model is designed with input variables as mentioned in Table 3. The parameters are chosen based on the number of layers and six different types of shell geometries.
For numerical predictions, the root mean square error (RMSE) is regarded as an excellent general-purpose error metric. Because RMSE is scale dependent, it should only be used to evaluate prediction errors of different models or model configurations for a single variable, not between variables. It is a metric for determining how well a regression line fits the data points. The following is the formula for computing RMSE.
Results and Discussion
The present study investigates the effect of various random input parameters (like material properties and geometric variations) for the first three natural frequencies response of HMGS shell structures. The sensitivity analysis is performed to identify the effect of each random input parameter on the global response of the structure. The probabilistic results are obtained from the efficient MARS integrated finite element (FE) framework. Figure 4 illustrates the flow diagram for sensitivity analysis for stochastic natural frequency of hybrid multi-functionally graded sandwich (HMGS) shells. The validation of the present model is accomplished in two ways. First, the deterministic model is validated by comparing the FE code with past literature. Second, the stochastic surrogate-based MARS model is validated with traditional MCS-based results. In the present study, elliptical paraboloid, cylindrical, hyperbolic paraboloid, and spherical shell (Fig. 1) of HMGS structures are studied for their dynamic response. The basic materials of HMGS shells are FG-based material of metal and ceramic mixture (aluminium is considered as metal and zirconia as ceramic) [108], the low-density soft core of foam material, and laminated composite (material properties presented in Table 3) [109]. Table 4 shows the first natural frequency for various mesh sizes (6 × 6, 8 × 8, 10 × 10) and for different values of power-law exponent (x) compared with the results presented by Zhao and Liew [39]. The results obtained demonstrate an acceptable approximation of the present study and with the results of Zhao and Liew [39]. Furthermore, mesh convergence of hybrid FG-sandwich cylindrical shells is conducted (refer to Fig. 5). From this mesh convergence study, the optimal mesh size is selected. To reduce computational time 6 × 6 mesh size is considered. Also, it is found that (from Table 3) the percentage of error for other mesh sizes is comparatively higher than that of 6 × 6. The FG cantilever plate of 6 \(\times\) 6 mesh size is considered for deterministic FE analysis, which provides satisfactory results, leading to 36 elements and 133 nodes. The deterministic result obtained is thus validated with that of results available in previous literature [110,111,112], as presented in Tables 5 and 6. There seems to be a good agreement for several cases of t/L ratio and power-law exponent (p) and for various shell geometries. The thickness of the plate is represented by "t", and "l" represents the length of the plate. Once the FE code is verified, the natural frequencies of an elliptical paraboloid, cylindrical, hyperbolic paraboloid, and spherical-shaped HMGS shells with different cases (total six cases) are investigated.

Flow diagram for sensitivity analysis for stochastic natural frequency of hybrid multi-functionally graded sandwich (HMGS) shells

Mesh convergence study of FE analysis of first three natural frequencies for different mesh size
As per industry standards, for the present analysis, the probabilistic variation of random input parameters is considered as C = 10% concerning the respective deterministic nominal values for obtaining the numerical results [113]. Depth-wise uncertainty is contemplated for variations of material properties (in the z-direction) as it is critical in hybrid multi-functionally graded sandwich structures. The computational efficiency is achieved by employing the MARS as the surrogate model in conjunction with FE code. The predictability of the result obtained through MARS is validated with the results of direct FE simulation through scatter plot. To reduce the computational cost, the surrogate model is formed by considering sample sizes of 256, 512, and 1024. For convergence study, some of the parametric analyses are performed; they are R-squared value, root mean square error (RMSE), mean absolute error (MAE), and mean square error (MSE), as illustrated in Table 7a–d. It is perceived that for sample size 1024, the percentage error is comparatively less than others (refer to Table 7a–d). The probability density function (PDF) plots (Fig. 6a–f) show the predicted outputs obtained while implementing the MARS surrogate model for different sample sizes (256, 512, and 1024) and the output obtained from the original MCS for the sample size of 10,000.



a PDF plots of the first three random NF(rad/s) for a case 1, b case 2 c case 3 d case 4 e case 5 and f case 6 using the MARS approach depict the outcome of compound source-uncertainties of random input parameters considering stochasticity "C" = 10%. The details are furnished at the start of Sect. 3. Here  represents N = 256MARS,
represents N = 256MARS,  represents N = 512MARS,
represents N = 512MARS,  represents N = 1024MARS and
represents N = 1024MARS and  represents N = 10000MCS
represents N = 10000MCS
MCS is a computing technique for the (typically approximate) solution of mathematical problems that employ random samples as its foundation. It is one of the most intriguing computational device for performing statistical inference in the field of stochastic analysis. Many fascinating models have incredibly complicated structures that are difficult to solve using typical methods. The posterior probability distribution encodes all information on which inference can be made within the bounds of the output quantity of interest. We can characterise these distributions and calculate expectations under them using MCS. Thus, it can be inferred that although MCS provides a robust output in probabilistic regime its one disadvantage is the consumption of time and computational efficiency. It is mitigated by the utilization of MARS as the surrogate model.
It is reviewed that the predictions for the 1024 sample size are satisfactory compared to sample sizes 256 and 512. After that, the result obtained by MARS is compared with the conventional MCS for a converged sample size of 1024, as depicted in Fig. 7a–f. The scatter plot for the same sample size, 1024 (refer to Fig. 6-a–f), portrays the minor deviation. Therefore, a sample size of 1024 is considered for further stochastic analysis. Both Figs. 6 and 7 show the excellent forecasting capability of the MARS model irrespective of the shell geometries and generate enough assurance on the MARS-based stochastic analysis for all cases.



Scatter plots of the first three random NF (rad/s) for a case 1, b case 2, c case 3, d case 4, e case 5 and f case 6 using MARS-MCS approach (1024 samples) and full-scale FE-MCS approach depicting the outcome of compound source-uncertainties of random input parameters considering stochasticity "C" = 10%. Here TR true response and PR predicted response
The present analysis considers the depth-wise varying framework (in 'z-direction') for four shell geometries of six structural forms. It is noted that the variation in material properties occurs throughout the thickness. The uncertainty in material properties is considered for stochastic analysis. Sensitivity analysis is performed for assessing the relative significance of the stochastic material properties (like Young’s modulus (E), shear modulus (G), Poisson's ratio (µ), mass density (ρ) and stochastic geometric configuration (ply-orientation angle (\(\theta\))) on the free vibration response of different shell geometries for several structural forms. The structures are subjected to free vibration to determine the most significant parameters in the global response of the structure. In the case of HMGS, sensitivity analysis is essential for the optimal design of the structures. It is significant to attribute for controlling of various random input variables, arising during the manufacturing process and different stages of operations. Figure 8a–f presents the sensitivity analysis of elliptical paraboloid, cylindrical, hyperbolic paraboloid, and spherical-shaped HMGS shells. Figure 8a represents the sensitivity analysis of HMGS shells for various geometries for case 1. In this case (case 1), hybrid structures are designed such that the upper facesheet is composed of the laminated composite while the lower facesheet is constructed of FGM, and in between, there is a soft core. From Fig. 8a, shows that for the cylindrical shell, ρ is obtained as the most sensitive parameter followed by E1, E2 and \(\theta\) while other parameters are found to be the least significant. For spherical and elliptical paraboloid shells, ρ is the most sensitive parameter, while E1, E2, \(\theta\), G12 show the moderate effect, and other parameters have negligible effect. In hyperbolic paraboloid shells, \(\theta\) is the most sensitive parameter followed by ρ. At the same time E1, E2 and G12 show moderate effects. Figure 8b represents the sensitivity analysis of HMGS shells for various geometries for case 2. In this case (case 2), hybrid structures are designed such that both the facesheets are of FGM, and in the middle, there is a soft core. From Fig. 8b, it is noted that for all shell geometries, ρ is the most sensitive parameter followed by E1 and G12. In contrast, E2 and \(\upsilon\) have moderate effects, whereas other parameters are obtained as the least significant parameters. Figure 8c represents the sensitivity analysis of HMGS shells for various geometries for case 3. In this case (case 3), hybrid structures are designed to make both the facesheets composed of laminated composite, keeping a soft core in the middle. On careful observation of Fig. 8c, it is found that for cylindrical shell ρ and \(\theta\) are obtained as the most sensitive parameter, followed E1 and E2, while other parameters are obtained as the least significant. In contrast, ρ and E1 (for spherical and elliptical paraboloid shells) show the maximum sensitivity followed by \(\theta\), G12, and E2, keeping other parameters having minor effects. In hyperbolic paraboloid shells,\(\theta\) is obtained as the most sensitive parameter, followed by ρ. At the same time, E1, E2, and G12 show moderate effects. Figure 8d represents the sensitivity analysis of HMGS shells for various geometries for case 4. In this case (case 4), hybrid structures are designed to construct both the facesheet of FGM and laminated composite keeping the soft core in the middle. It is observed in Fig. 8d that for all the shell geometries, ρ predicts the highest sensitivity pursued by E1, E2, and G12. In contrast, other parameters are observed to be the least significant parameters. Figure 8e represents the sensitivity analysis of HMGS shells for various geometries of case 5. In this case (case 5), hybrid structures are designed so that both the facesheets are FGM, and the middle core is laminated composite. Figure 8e shows that for all the shell geometries, ρ predicts the highest sensitivity corresponding to the fundamental natural frequencies. It is followed by E1, E2 and G12, while others are found to be the least significant parameters. Figure 8f represents the sensitivity analysis of HMGS shells for various geometries of case 6. In this case (case 6), hybrid structures are designed so that both the facesheets are laminated composite and FGM's middle core. Figure 8f illustrates that for all the shell geometries, ρ predicts the highest sensitivity. It is followed by E1, E2, and G12, whereas other parameters are comparatively less significant.



Sensitivity analysis for the first three random natural frequencies (rad/s) for a case 1, b case 2, c case 3, d case 4, e case 5, and f case 6 considering various shell geometries (i) Scyl., (ii) Ssph., (iii) Sell. and (iv) Shyp.
Conclusions
With the increasing attention to have multi-functionality in advanced structures, the necessity of sensitivity analysis corresponding to multiple response quantities simultaneously and to propose a unified sensitivity analysis framework has become apparent from the viewpoint of effective computational modelling and manufacturing quality control. The present study focuses on the sensitivity of frequency responses of hybrid FG-sandwich structures with multi-functional applications. This study is helpful for establishing a unified measure in the case of multi-objective performances. In these hybrid structures, the advantages of each constituting component could potentially be exploited in a single structure. Such a construction could be helpful where the surface is exposed to extreme temperature or environmental conditions. However, an optimum lightweight design can still be achieved based on composite construction and depth‐wise gradation towards the center of the shell. A novel MARS-based sensitivity analysis of these hybrid multi-functionally graded sandwich shells is developed to achieve computational efficiency without compromising with the outcome. Such surrogate-assisted FE approaches are crucial for computationally intensive multi-objective systems. It enumerates the degree of influence of various random input variables in the case of dynamic frequency responses. The MARS surrogate model is coupled with a finite element model to achieve computational efficacy (time and cost reduction). The numerical results indicate the proportional dominance of several random input parameters. Such analysis can provide the most significant parameters and their relative degree of importance in the multi-dimensional structural systems to design safe and reliable materials. It will lead to more optimized designs and better quality control while manufacturing the complex advanced structural systems. The results obtained showcase the sensitivity of the various input parameters like material properties and ply-orientation angle for first three natural frequencies. In most cases it is noted that mass density is the most sensitive parameter. Implementing different structural forms with different geometries in the present study will a vital role in the aerospace, civil construction, marine, naval, and automobile sectors. The detailed sensitivity analysis offers in-depth structure performance and characteristic understanding. The design paradigms can be enhanced, and a compelling performance can be obtained. Thus, the contribution of this article lies in both the development of a computationally efficient sensitivity analysis approach and the insightful numerical results for hybrid structures presented thereafter. The comprehensive and collective sensitivity quantification considering multi-functional objectives, as presented in this article, would lead to efficient computational modelling of complex structural systems for more optimized designs and better quality control during manufacturing. For further study, the computationally efficient uncertainty approach developed in this article can be utilised to investigate the effect of uncertainties in various other structures.
Data availability
The data and materials in this paper are available.
References
Chandrashekhar M, Ganguli R (2010) Nonlinear vibration analysis of composite laminated and sandwich plates with random material properties. Int J Mech Sci 52(7):874–891
Pandit MK, Singh BN, Sheikh AH (2010) Vibration of sandwich plates with random material properties using improved higher-order zig-zag theory. Mech Adv Mater Struct 17(7):561–572
Arunkumar MP, Pitchaimani J, Gangadharan KV, Babu ML (2016) Influence of nature of core on vibro acoustic behavior of sandwich aerospace structures. Aerosp Sci Technol 56:155–167
Kavalur P, Jeyaraj P, Babu GR (2014) Static behaviour of visco-elastic sandwich plate with nano-composite facings under mechanical load. Procedia Materials Science 5:1376–1384
Tornabene F, Fantuzzi N, Bacciocchi M, Reddy JN (2017) An equivalent layer-wise approach for the free vibration analysis of thick and thin laminated and sandwich shells. Appl Sci 7(1):17
Farooq U, Ahmad MS, Rakha SA, Ali N, Khurram AA, Subhani T (2017) Interfacial mechanical performance of composite honeycomb sandwich panels for aerospace applications. Arab J Sci Eng 42(5):1775–1782
Van Tung H (2015) Thermal and thermo mechanical postbuckling of FGM sandwich plates resting on elastic foundations with tangential edge constraints and temperature-dependent properties. Compos Struct 131:1028–1039
Natarajan S, Manickam G (2012) Bending and vibration of functionally graded material sandwich plates using an accurate theory. Finite Elem Anal Des 57:32–42
Vaishali, Mukhopadhyay T, Kumar RR, Dey S (2020) Probing the multi-physical probabilistic dynamics of a novel functional class of hybrid composite shells. Compos Struct 262:113294
Zenkour AM (2005) A comprehensive analysis of functionally graded sandwich plates: part 1—deflection and stresses. Int J Solids Struct 42(18–19):5224–5242
Zenkour AM, Alghamdi NA (2008) Thermoelastic bending analysis of functionally graded sandwich plates. J Mater Sci 43(8):2574–2589
Das M, Barut A, Madenci E, Ambur DR (2006) A triangular plate element for thermo-elastic analysis of sandwich panels with a functionally graded core. Int J Numer Methods Eng 68(9):940–966
Li Q, Iu VP, Kou KP (2008) Three-dimensional vibration analysis of functionally graded material sandwich plates. J Sound Vib 311(1–2):498–515
Kashtalyan M, Menshykova M (2009) Three-dimensional elasticity solution for sandwich panels with a functionally graded core. Compos Struct 87(1):36–43
Vaishali M, T., Karsh, P.K., Basu, B. and Dey, S., (2020) Machine learning based stochastic dynamic analysis of functionally graded shells. Compos Struct 237:111870
Areias P, Rabczuk T, Msekh M (2016) Phase-field analysis of finite-strain plates and shells including element subdivision. Comput Methods Appl Mech Eng 312:322–350
Areias P, Rabczuk T (2013) Finite strain fracture of plates and shells with configurational forces and edge rotations. Int J Numer Meth Eng 94(12):1099–1122
Nguyen-Thanh N, Zhou K, Zhuang X, Areias P, Nguyen-Xuan H, Bazilevs Y, Rabczuk T (2017) Isogeometric analysis of large-deformation thin shells using RHT-splines for multiple-patch coupling. Comput Methods Appl Mech Eng 316:1157–1178
Fleck NA, Deshpande VS (2004) The resistance of clamped sandwich beams to shock loading. J Appl Mech 71(3):386–401
Cui X, Zhao L, Wang Z, Zhao H, Fang D (2012) A lattice deformation based model of metallic lattice sandwich plates subjected to impulsive loading. Int J Solids Struct 49(19–20):2854–2862
Zhu F, Wang Z, Lu G, Nurick G (2010) Some theoretical considerations on the dynamic response of sandwich structures under impulsive loading. Int J Impact Eng 37(6):625–637
Qin QH, Wang TJ (2009) An analytical solution for the large deflections of a slender sandwich beam with a metallic foam core under transverse loading by a flat punch. Compos Struct 88(4):509–518
Qin Q, Yuan C, Zhang J, Wang TJ (2014) Large deflection response of rectangular metal sandwich plates subjected to blast loading. Eur J Mech A Solids 47:14–22
Dharmasena KP, Wadley HN, Xue Z, Hutchinson JW (2008) Mechanical response of metallic honeycomb sandwich panel structures to high-intensity dynamic loading. Int J Impact Eng 35(9):1063–1074
Cui X, Zhao L, Wang Z, Zhao H, Fang D (2012) Dynamic response of metallic lattice sandwich structures to impulsive loading. Int J Impact Eng 43:1–5
Zhu F, Zhao L, Lu G, Wang Z (2008) Structural response and energy absorption of sandwich panels with an aluminium foam core under blast loading. Adv Struct Eng 11(5):525–536
Jamil A, Guan ZW, Cantwell WJ, Zhang XF, Langdon GS, Wang QY (2019) Blast response of aluminium/thermoplastic polyurethane sandwich panels–experimental work and numerical analysis. Int J Impact Eng 127:31–40
Reyes G (2010) Mechanical behavior of thermoplastic FML-reinforced sandwich panels using an aluminum foam core: experiments and modeling. J Sandwich Struct Mater 12(1):81–96
Kiratisaevee H, Cantwell WJ (2004) The impact response of aluminum foam sandwich structures based on a glass fiber-reinforced polypropylene fiber-metal laminate. Polym Compos 25(5):499–509
Liu C, Zhang YX, Li J (2017) Impact responses of sandwich panels with fibre metal laminate skins and aluminium foam core. Compos Struct 182:183–190
Liu C, Zhang YX, Ye L (2017) High velocity impact responses of sandwich panels with metal fibre laminate skins and aluminium foam core. Int J Impact Eng 100:139–153
Baştürk SB, Tanoğlu M, Çankaya MA, Eğilmez OÖ (2016) Dynamic behavior predictions of fiber-metal laminate/aluminum foam sandwiches under various explosive weights. J Sandwich Struct Mater 18(3):321–342
Tahir SI, Chikh A, Tounsi A, Al-Osta MA, Al-Dulaijan SU, Al-Zahrani MM (2021) Wave propagation analysis of a ceramic-metal functionally graded sandwich plate with different porosity distributions in a hygro-thermal environment. Compos Struct 269:114030
Avcar M, Hadji L, Civalek Ö (2021) Natural frequency analysis of sigmoid functionally graded sandwich beams in the framework of high order shear deformation theory. Compos Struct 276:114564
Kouider D, Kaci A, Selim MM, Bousahla AA, Bourada F, Tounsi A, Tounsi A, Hussain M (2021) An original four-variable quasi-3D shear deformation theory for the static and free vibration analysis of new type of sandwich plates with both FG face sheets and FGM hard core. Steel Compos Struct 41(2):167–191
Hadji L, Avcar M (2020) Free vibration analysis of FG porous sandwich plates under various boundary conditions. J Appl Comput Mechs. https://doi.org/10.22055/JACM.2020.35328.2628
Zaitoun MW, Chikh A, Tounsi A, Sharif A, Al-Osta MA, Al-Dulaijan SU, Al-Zahrani MM (2021) An efficient computational model for vibration behavior of a functionally graded sandwich plate in a hygrothermal environment with viscoelastic foundation effects. Eng Comput 1–15
Talebizad A, Isavand S, Bodaghi M, Shakeri M, Mohandesi JA (2013) Thermo-mechanical behavior of cylindrical pressure vessels made of functionally graded austenitic/ferritic steels. Int J Mech Sci 77:171–183
Zhao X, Liew KM (2011) Free vibration analysis of functionally graded conical shell panels by a meshless method. Compos Struct 93(2):649–664
Bodaghi M, Shakeri M (2012) An analytical approach for free vibration and transient response of functionally graded piezoelectric cylindrical panels subjected to impulsive loads. Compos Struct 94(5):1721–1735
Mudhaffar IM, Tounsi A, Chikh A, Al-Osta MA, Al-Zahrani MM, Al-Dulaijan SU (2021) Hygro-thermo-mechanical bending behavior of advanced functionally graded ceramic metal plate resting on a viscoelastic foundation. Structures, vol 33. Elsevier, Hoboken, pp 2177–2189
Hachemi H, Bousahla AA, Kaci A, Bourada F, Tounsi A, Benrahou KH, Tounsi A, Al-Zahrani MM, Mahmoud SR (2021) Bending analysis of functionally graded plates using a new refined quasi-3D shear deformation theory and the concept of the neutral surface position. Steel Compos Struct 39(1):51–64
Soldatos K, Aydogdu M, Gul U (2019) Plane strain polar elasticity of fibre-reinforced functionally graded materials and structures. J Mech Mater Struct 14(4):497–535
Zhu S, Ni Y, Sun J, Tong Z, Zhou Z, Xu X (2019) Accurate buckling analysis of piezoelectric functionally graded nanotube-reinforced cylindrical shells under combined electro-thermo-mechanical loads. J Mech Mater Struct 14(3):361–392
Zhang J, Zhang L, Li Y, Huang Y, Zhang H, Gao Y (2021) Free vibration of functionally graded piezoelectric hexagonal quasicrystal plates. J Mech Mater Struct 16(4):527–542
Hieu DV, Chan DQ, Sedighi HM (2021) Nonlinear bending, buckling and vibration of functionally graded nonlocal strain gradient nanobeams resting on an elastic foundation. J Mech Mater Struct 16(3):327–346
Zheng C, Mi C (2020) Analytical solutions for displacements and stresses in functionally graded thick-walled spheres subjected to a unidirectional outer tension. J Mech Mater Struct 15(5):585–603
Huang Y, Karami B, Shahsavari D, Tounsi A (2021) Static stability analysis of carbon nanotube reinforced polymeric composite doubly curved micro-shell panels. Arch Civ Mech Eng 21(4):1–15
Damanpack AR, Bodaghi MAHDI, Ghassemi HASSAN, Sayehbani MESBAH (2013) Boundary element method applied to the bending analysis of thin functionally graded plates. Latin Am J Solids Struct 10:549–570
Nayak P, Armani A (2021) Optimal three-dimensional design of functionally graded parts for additive manufacturing using Tamura–Tomota–Ozawa model. Proceedings of the Institution of Mechanical Engineers, Part L: Journal of Materials: Design and Applications 235(9):1993–2006
Moghaddam AM, Ahmadian MT, Kheradpisheh A (2013) Acoustic wave propagation through a functionally graded material plate with arbitrary material properties. Proceedings of the Institution of Mechanical Engineers, Part L: Journal of Materials: Design and Applications 227(2):100–110
Nikrad SF, Kanellopoulos A, Bodaghi M, Chen ZT, Pourasghar A (2021) Large deformation behavior of functionally graded porous curved beams in thermal environment. Arch Appl Mech 91(5):2255–2278
Sobhani E, Arbabian A, Civalek Ö, Avcar M (2021) The free vibration analysis of hybrid porous nanocomposite joined hemispherical–cylindrical–conical shells. Eng Comput. https://doi.org/10.1007/s00366-021-01453-0
Kumar RR, Mukhopadhyay T, Pandey KM, Dey S (2019) Stochastic buckling analysis of sandwich plates: the importance of higher order modes. Int J Mech Sci 152:630–643
Dey S, Mukhopadhyay T, Sahu SK, Adhikari S (2018) Stochastic dynamic stability analysis of composite curved panels subjected to non-uniform partial edge loading. Eur J Mech A Solids 67:108–122
Dey S, Mukhopadhyay T, Naskar S, Dey TK, Chalak HD, Adhikari S (2019) Probabilistic characterisation for dynamics and stability of laminated soft core sandwich plates. J Sandwich Struct Mater 21(1):366–397
Dey S, Mukhopadhyay T, Spickenheuer A, Adhikari S, Heinrich G (2016) Bottom up surrogate based approach for stochastic frequency response analysis of laminated composite plates. Compos Struct 140:712–727
Karsh PK, Mukhopadhyay T, Dey S (2018) Spatial vulnerability analysis for the first ply failure strength of composite laminates including effect of delamination. Compos Struct 184:554–567
Dey S, Mukhopadhyay T, Sahu SK, Adhikari S (2016) Effect of cutout on stochastic natural frequency of composite curved panels. Compos B Eng 105:188–202
Vaishali, Kumar RR, Dey S (2021) Dynamic sensitivity analysis of random impact behaviour of hybrid cylindrical shells. Recent advances in layered materials and structures. Springer, Singapore, pp 287–306
Kumar RR, Mukhopadhyay T, Naskar S, Pandey KM, Dey S (2019) Stochastic low-velocity impact analysis of sandwich plates including the effects of obliqueness and twist. Thin Walled Struct 145:106411
Ke S, Xu L, Ge Y (2018) Sensitivity analysis and estimation method of natural frequency for large cooling tower based on field measurement. Thin Walled Struct 127:809–821
Kotełko M, Lis P, Macdonald M (2017) Load capacity probabilistic sensitivity analysis of thin-walled beams. Thin Walled Struct 115:142–153
Deng L, Li J, Yang Y, Deng P (2020) Imperfection sensitivity analysis and DSM design of web-stiffened lipped channel columns experiencing local-distortional interaction. Thin Walled Struct 152:106699
Song X, Sun G, Li Q (2016) Sensitivity analysis and reliability based design optimisation for high-strength steel tailor welded thin-walled structures under crashworthiness. Thin Walled Struct 109:132–142
Kala Z (2011) Sensitivity analysis of stability problems of steel plane frames. Thin Walled Struct 49(5):645–651
Shahgholian-Ghahfarokhi D, Rahimi G (2020) A sensitivity study of the free vibration of composite sandwich cylindrical shells with grid cores. Iran J Sci Technol Trans Mech Eng 44(1):149–162
Ghazani MS, Binesh B, Fardi-Ilkhchy A (2019) Effect of strain rate sensitivity and strain hardening exponent of materials on plastic strain distribution and damage accumulation during equal channel angular pressing. Iran J Sci Technol Trans Mech Eng 43(1):831–844
Bernard SS, Jayakumari LS (2018) Pressure and temperature sensitivity analysis of palm fiber as a biobased reinforcement material in brake pad. J Braz Soc Mech Sci Eng 40(3):152
Di Sciuva M, Gherlone M, Lomario D (2003) Multiconstrained optimisation of laminated and sandwich plates using evolutionary algorithms and higher-order plate theories. Compos Struct 59(1):149–154
Rathbun HJ, Zok FW, Evans AG (2005) Strength optimisation of metallic sandwich panels subject to bending. Int J Solids Struct 42(26):6643–6661
Tan XH, Soh AK (2007) Multi-objective optimisation of the sandwich panels with prismatic cores using genetic algorithms. Int J Solids Struct 44(17):5466–5480
Icardi U, Ferrero L (2009) Optimisation of sandwich panels with functionally graded core and faces. Compos Sci Technol 69(5):575–585
Brockman RA, Lung FY (1988) Sensitivity analysis with plate and shell finite elements. Int J Numer Methods Eng 26(5):1129–1143
Lee KW, Park GJ (1997) Accuracy test of sensitivity analysis in the semi-analytic method with respect to configureuration variables. Comput Struct 63(6):1139–1148
Hamdia KM, Ghasemi H, Zhuang X, Alajlan N, Rabczuk T (2018) Sensitivity and uncertainty analysis for flexoelectric nanostructures. Comput Methods Appl Mech Eng 337:95–109
António CC, Hoffbauer LN (2013) Uncertainty assessment approach for composite structures based on global sensitivity indices. Compos Struct 99:202–212
Zhang Z, Zhan C, Shankar K, Morozov EV, Singh HK, Ray T (2017) Sensitivity analysis of inverse algorithms for damage detection in composites. Compos Struct 176:844–859
de Sousa BS, Gomes GF, Jorge AB, da Cunha Jr SS, AncelottiJr AC (2018) A modified topological sensitivity analysis extended to the design of composite multidirectional laminates structures. Compos Struct 200:729–746
Bishay PL, Sofi AR (2018) Sensitivity analysis of a smart soft composite robotic finger design using geometrically nonlinear laminated composite finite beam elements. Mater Today Commun 16:111–118
Zadeh FK, Nossent J, Sarrazin F, Pianosi F, van Griensven A, Wagener T, Bauwens W (2017) Comparison of variance-based and moment-independent global sensitivity analysis approaches by application to the SWAT model. Environ Model Softw 91:210–222
Zhao W, Bu L (2019) Global sensitivity analysis with a hierarchical sparse metamodeling method. Mech Syst Signal Process 115:769–781
Vu-Bac N, Lahmer T, Zhuang X, Nguyen-Thoi T, Rabczuk T (2016) A software framework for probabilistic sensitivity analysis for computationally expensive models. Adv Eng Softw 100:19–31
Zhao X, Lee YY, Liew KM (2009) Free vibration analysis of functionally graded plates using the element-free kp-Ritz method. J Sound Vib 319(3–5):918–939
Loy CT, Lam KY, Reddy JN (1999) Vibration of functionally graded cylindrical shells. Int J Mech Sci 41(3):309–324
Touloukian YS (1967) Thermophysical properties of high temperature solid materials: elements, vol 1. Macmillan, London
Dey S, Mukhopadhyay T, Spickenheuer A, Gohs U, Adhikari S (2016) Uncertainty quantification in natural frequency of composite plates—an artificial neural network based approach. Adv Compos Lett 25(2):096369351602500203
Saltelli A, Ratto M, Andres T, Campolongo F, Cariboni J, Gatelli D, Saisana M, Tarantola S (2008) Global sensitivity analysis: the primer. Wiley, Hoboken
Sobol IM (2001) Global sensitivity indices for nonlinear mathematical models and their Monte Carlo estimates. Math Comput Simul 55(1–3):271–280
Iman RL, Hora SC (1990) A robust measure of uncertainty importance for use in fault tree system analysis. Risk Anal 10(3):401–406
Homma T, Saltelli A (1996) Importance measures in global sensitivity analysis of nonlinear models. Reliab Eng Syst Saf 52(1):1–17
Mukhopadhyay T, Chakraborty S, Dey S, Adhikari S, Chowdhury R (2017) A critical assessment of Kriging model variants for high-fidelity uncertainty quantification in dynamics of composite shells. Arch Comput Methods Eng 24(3):495–518
Vaishali, Dey S (2021) Temperature-dependent random frequency of functionally graded spherical shells—a PCE approach. Recent advances in mechanical engineering. Springer, Singapore, pp 509–516
Gupta KK, Mukhopadhyay T, Roy A, Roy L, Dey S (2021) Sparse machine learning assisted deep computational insights on the mechanical properties of graphene with intrinsic defects and doping. J Phys Chem Solids 155:110111
Dey S, Mukhopadhyay T, Adhikari S (2017) Metamodel based high-fidelity stochastic analysis of composite laminates: a concise review with critical comparative assessment. Compos Struct 171:227–250
Mukhopadhyay T, Naskar S, Dey S, Adhikari S (2016) On quantifying the effect of noise in surrogate based stochastic free vibration analysis of laminated composite shallow shells. Compos Struct 140:798–805
Dey S, Mukhopadhyay T, Khodaparast HH, Adhikari S (2016) A response surface modelling approach for resonance driven reliability based optimisation of composite shells. Period Polytech Civ Eng 60(1):103–111
Gupta KK, Mukhopadhyay T, Roy L, Dey S (2021) Hybrid machine learning assisted quantification of the compound internal and external uncertainties of graphene: Towards inclusive analysis and design. Materials Advances. 3:1160–1181
Saha S, Gupta KK, Maity SR, Dey S (2021) Data-driven probabilistic performance of Wire EDM: A machine learning based approach. Proc Inst Mech Eng Part B J Eng Manuf 236:908–919
Kumar RR, Vaishali, Pandey KM, Dey S (2020) Effect of skewness on random frequency responses of sandwich plates. Recent advances in theoretical, applied, computational and experimental mechanics. Springer, Singapore, pp 13–20
Vaishali, Dey S (2021) Support vector model based thermal uncertainty on stochastic natural frequency of functionally graded cylindrical shells. Recent advances in computational mechanics and simulations. Springer, Singapore, pp 651–658
Friedman JH (1991) Multivariate adaptive regression splines. Ann Stat. https://doi.org/10.1214/aos/1176347963
Hastie T, Tibshirani R, Friedman J (2009) The elements of statistical learning: data mining, inference, and prediction. Springer, New York
Karsh PK, Mukhopadhyay T, Chakraborty S, Naskar S, Dey S (2019) A hybrid stochastic sensitivity analysis for low-frequency vibration and low-velocity impact of functionally graded plates. Compos B Eng 176:107221
Karsh PK, Thakkar B, Kumar RR, Dey S (2021) Probabilistic oblique impact analysis of functionally graded plates–a multivariate adaptive regression splines approach. Eur J Comput Mech. https://doi.org/10.13052/ejcm2642-2085.30234
Sobol IYM (1967) On the distribution of points in a cube and the approximate evaluation of integrals. Zhurnal Vychislitel’noi Matematikii Matematicheskoi Fiziki 7(4):784–802
Craven P, Wahba G (1978) Smoothing noisy data with spline functions. Numer Math 31(4):377–403
Singh H, Hazarika BC, Dey S (2017) Low velocity impact responses of functionally graded plates. Procedia Eng 173:264–270
Rizov V, Shipsha A, Zenkert D (2005) Indentation study of foam core sandwich composite panels. Compos Struct 69(1):95–102
Baferani AH, Saidi AR, Ehteshami H (2011) Accurate solution for free vibration analysis of functionally graded thick rectangular plates resting on elastic foundation. Compos Struct 93(7):1842–1853
Ta HD, Noh HC (2015) Analytical solution for the dynamic response of functionally graded rectangular plates resting on elastic foundation using a refined plate theory. Appl Math Model 39:6243–6257
Sayyad AS, Ghugal YM (2021) Static and free vibration analysis of doubly-curved functionally graded material shells. Compos Struct 269:114045
Hull R, Keblinski P, Lewis D, Maniatty A, Meunier V, Oberai AA, Picu CR, Samuel J, Shephard MS, Tomozawa M, Vashishth D (2018) Stochasticity in materials structure, properties, and processing—a review. Appl Phys Rev 5(1):011302
Acknowledgements
The first author acknowledges the Ministry of Education (MoE), Government of India, for the financial support during this research work. The second author acknowledges the Aeronautics Research and Development Board (AR&DB), Government of India, for the financial support during this research work.
Author information
Authors and Affiliations
Contributions
The first author acquired supervision, methodology, software and contributed to investigation and data curation, conceptualization, writing—original draft. SK acquired methodology, and provided resources and contributed to writing. SD, PKK and RRK provided resources and contributed to writing.
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no known conflicts of interest for the work reported in this paper.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Vaishali, Kushari, S., Kumar, R.R. et al. Sensitivity Analysis of Random Frequency Responses of Hybrid Multi-functionally Graded Sandwich Shells. J. Vib. Eng. Technol. 11, 845–872 (2023). https://doi.org/10.1007/s42417-022-00612-x
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s42417-022-00612-x