
Abstract
The research on both direct force measuring test technique of dynamic aerodynamic performance of oscillating airfoils in low-speed flow and inertial force and pitching moment correction technique is carried out in the two-dimensional test section of the NF-3 low-speed wind tunnel of Northwestern Polytechnical University. The influence of the inertial force and pitching moment of the airfoil model on wind tunnel experimental data of dynamic aerodynamic performance is studied, the signal interference of the experimental data is analyzed, and the digital filtering method of the data, and the correction method for inertial force and pitching moment of airfoil models are proposed. The analysis of the results shows that the experimental data have obvious interference signal components within frequency interval between 16 and 60 Hz. When the oscillation frequency of the airfoil increases, the frequency band of the interference component becomes wider. Low-pass digital filtering in which the lift and drag data are subjected to a cutoff frequency of 16 Hz and the pitching moment data to a cut-off frequency of 8 Hz can eliminate the signal interference. The direct force measuring result of dynamic aerodynamic performance in the wind-off state contains a certain amount of aerodynamic forces, and there is a larger error in the method in which the influence of inertial force and pitching moment on the direct force measuring result is corrected by subtracting the wind-off data in the dynamic test. It is correct and feasible to use designed model motion law to fit the change of the angle of attack, to calculate and correct the inertial force and pitching moment. As the reduced frequency increases, the dynamic stall of the pitching oscillating airfoil is further delayed and the hysteresis loop of lift and pitching moment becomes larger.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
The maneuverability requirements of jet fighters, the study of the dynamic characteristics of helicopter rotors and wind turbines in the field of wind energy all require more in-depth research on the dynamic aerodynamic performance and dynamic stall characteristics of airfoils [1,2,3]. In the 1940s, Himmelskamp first discovered the existence of dynamic stalls in experiments, but it was not until the study of helicopter rotor experiments in the 1960s that the study of dynamic stalls received attention [4,5,6,7,8,9]. A variety of test methods have been applied to dynamic stall research to measure lift, drag, moment, and related flow parameters and flow characteristics during the stall. The commonly used measuring methods for dynamic stall research include: (1) using dynamic pressure sensors to measure airfoil surface pressure [6, 7, 9,10,11], (2) using hot-wire probes [6, 7, 12] or particle image velocimetry (PIV) measure the velocity field around the airfoil [13,14,15], and (3) using the direct force measurement to study the influence of various airfoil motion parameters on its dynamic aerodynamic performance [12, 16,17,18,19]. Werner et al., Oshima and Ramaprian used PIV to study the flow field and vortex motion around the pitching oscillating airfoils respectively in 1996 and 1997 [13, 14]. In 2014, Wang Q, Zhao QJ and Zhao GQ used 3D-PIV to measure the dynamic stall flow field characteristics of a typical helicopter rotor SC1095 airfoil, and measured the transport speed of the leading edge vortex over airfoils [15]. In 1991, Tang RY, Hua XM, and Wu SJ completed direct dynamic force measuring test of the NACA0012 airfoil with pitching oscillation in the NH-2 low-speed wind tunnel of Nanjing University of Aeronautics and Astronautics. The experimental results obtained by the direct force measurement are in good agreement with the traditional pressure measurement in the world [16]. In 1994, Panda and Zaman carried out a force measuring test of the pitching oscillating NACA0012 airfoil by the direct force measurement. The research only succeeded in the small oscillating amplitude range with the average angle of attack of 0° [12]. In 2006, Tsang conducted a direct force measuring test of NACA0012 airfoil in the wind tunnel laboratory of the School of Mechanical Engineering of Hong Kong Polytechnic University. The results show that increasing the reduced frequency k will cause the dynamic stall angle of attack and the maximum lift to increase [17]. In 2010, Rival and Tropea conducted a direct force measuring and smoke flow displaying study of SD7003 airfoil with pitching oscillating and heaving motion. However, due to problems such as structural resonance, the study was successful for reduced frequency of k < 0.15 [18]. In 2012, Lin et al. conducted a direct dynamic force measuring test of the CH-9.5 rotor wing in the SVS-2 wind tunnel of the Russian Central Institute of Aerodynamics. By increasing the reduced frequency k, they observed a delay of stall and a great increase of the maximum lift coefficient [19]. The surface pressure measurement can only obtain the differential pressure drag, and the results of lift and pitching moment also have larger errors. Although the direct force measurement cannot obtain the detailed information of the flow field, it can better obtain the dynamic aerodynamic performance data of airfoils.
The measuring results of the aerodynamic balance in the direct dynamic force measuring test include a certain amount of inertial force and pitching moment. To eliminate this error, in the direct force measuring study, usually a test with pitching oscillating motion of an airfoil is conducted in advance without starting the wind tunnel (i.e., wind-off) before the formal test, and then the test with the same pitching oscillating motion of the airfoil is performed under the required test wind speed in the wind tunnel (i.e., wind-on). Then, the wind-off data are subtracted from the wind-on data, which is considered to be able to eliminate the influence of the inertial force and pitching moment under the required test wind speed. Since the airfoil model is still subjected to aerodynamic forces due to the relative rotating motion of the airfoil to the stationary air even when the wind tunnel is not in operation, errors exist in this method of eliminating influence of inertia. The National Key Laboratory of Science and Technology on Aerodynamic Design and Research of Northwestern Polytechnical University (NPU) has carried out researches on this issue on a wind turbine airfoil with a relative thickness of 18% in a sinusoidal pitch oscillation at a Reynolds number of millions. By accurately measuring the transient angle of attack of the model movement during the wind tunnel test, calculating the inertial force and pitching moment and correcting the experimental data, it has been verified that the influence of inertia has been successfully corrected. In this paper, the direct force measurement of NPU is described in detail.
2 Descriptions of Experiments
2.1 Experimental Equipment and Instruments
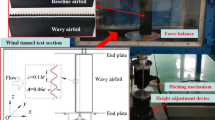
The experiment was carried out in the two-dimensional test section of the NF-3 low-speed wind tunnel of the National Key Laboratory of Science and Technology on Aerodynamic Design and Research at Northwestern Polytechnical University. The wind tunnel is a low-speed open circuit wind tunnel made of full steel in structure, and has a length of 80 m, driven by an electric motor with a power of 1120 kW. The two-dimensional test section has a rectangular cross-section of 8 m long, 3 m wide, and 1.6 m high. The maximum wind speed is 130 m/s, the minimum stable wind speed is 10 m/s for the empty wind tunnel, the axial static pressure gradient is dCp/dx = 0.0011 (1/m) and the test section airflow turbulence intensity is ε = 0.045%.
The driving mechanism for model pitching oscillating motion is composed of a DC motor, a large flywheel, a reducer, a T-shaped rod, an adjustable connecting rod and a swing lever. The DC motor with tachometer drives the T-shaped rod, adjustable connecting rod and swing lever through a large flywheel and a reducer to make the model reciprocate in a sinusoidal pitching oscillating law in the air flow of the test section. The motor is the Z4-132-3 type DC speed-adjustable motor with a rated power of 18.5 kW, a rated rotation speed of 1540 rpm, and a maximum rotation speed of 3000 rpm. The reducer is cylindrical worm reducer with a brand WHC18, and has a reduction ratio of 8. The oscillation frequency range of the airfoil model is 0 ~ 5 Hz. It is shown through theoretical analysis and experimental verification that the maximum deviation in sinusoidal pitching oscillation angle between the mechanism operation and the theoretical computation is less than 0.146% (Fig. 1).

Schematic diagram of the driving mechanism for airfoil model oscillating motion
A four-component box-type airfoil aerodynamic balance named YXTP-4 is used for the aerodynamic force measuring. The measuring components of the balance are lift Y, drag X, side force Z, and pitching moment Mz. The overall dimensions of the balance are 150 mm in length, 65 mm in width and 77 mm in height. The designed center of the balance is 36.5 mm from the bottom. The balance material is the high-strength aged steel 00Ni18Co8Mo5TiAl (Table 1).
An angle sensor is installed on the airfoil model rotation shaft. In the experiment, the signal of angle sensor and the four-component signals of the balance are acquired by the dynamic measuring module of the Agilent VXI E8401A data acquisition system. The dynamic measuring module has 32 measurement channels, each channel can be independently sampled in parallel, the range of each channel can be set independently, the acquisition rate for each channel is 100 kHz, each channel has a 16-bit independent A/D converter and the input signal voltage range of ± 12.5 mV ~ ± 10.0 V. The dynamic measurement accuracy of the system is better than 0.1% FS.
2.2 Experimental Model
The experimental airfoil model adopts a wind turbine airfoil with 18% thickness, a span of 1.6 m and a chord length of 0.6 m. A span-wise three-section structure with an overall frame is used where the upper and lower sections of the model are directly manufactured on the overall frame [20]. These two sections are supported by supporting plates and shaped by outer skin to fit the airfoil profile with their interior being hollow, where the outer skin is made of glass fiber reinforced plastic with a thickness of 5 mm, and the supporting plates are wing-shaped metal or fiberboard (Fig. 2). The middle section of the model is made up of upper and lower halves, which are made of high-strength, low-density 7075 aluminum alloy, and suspended on the overall frame of the model through the balance (Fig. 3). This not only ensures the overall strength and stiffness of the model, but also minimizes the mass and moment of inertia of the model, hence increases the oscillation frequency and reduced frequency during test. The origin of the Cartesian coordinate system is at the leading edge of the central section of symmetry of the wing, with the x direction in the chordwise direction, and the y direction perpendicular to the chord, and the z direction in the lateral direction. In fact, x, y are the horizontal plane while z is in the vertical direction in NF-3 wind tunnel. The mass of the middle section of the manufactured model is 13.5 kg, the position of the center of gravity is xG = 216.41 mm, yG = 13.71 mm, and zG = − 9.74 mm.

Structure diagram of the airfoil dynamic force measurement model

The upper and lower cover of the middle section of the airfoil model
The experimental model is vertically suspended between the top and bottom turntables of the two dimensional test section of the wind tunnel. The rotation shaft of the model is inserted and fixed into the center holes of the two turntables with bearings so that the model can rotate easily. The top part of the rotation shaft penetrates the upper turntable to the other side and connects to the model pitching oscillating motion driving mechanism.
3 Elimination Method of Inertial Force and Pitching Moment
In the airfoil dynamic force measurement experiment, the airfoil model performs sinusoidal pitch oscillation driven by the driving mechanism, and the middle section of the model is driven directly by the aerodynamic balance. The force and pitching moment measured by the balance include both the aerodynamic force and pitching moment on the middle section of the model exerted by flow field and the inertial force and pitching moment of the middle section of the model. It is necessary to evaluate the inertial force and pitching moment of the middle section of the force measurement model and to correct the measured force results, that is, the inertial force and inertial moment must be deducted from the measured force so that the force contains only pure aerodynamic contributions.
3.1 Elimination of Inertial Pitching Moment
When the center of gravity G of the middle section of the airfoil model is on the model's axis of rotation, as shown in Fig. 4, the middle section of the model only produces an inertial pitching moment on the balance during the pitching oscillation motion of the airfoil about the model's axis of rotation, and no inertial force is generated in the x and y directions. Of course, the moment reference center of the aerodynamic balance often does not coincide with the axis of rotation of the model. Thus before the inertial force and inertial moment are deducted, the measured values are first converted to the coordinate system in which the origin is at the axis of rotation of the model.

Sectional diagram of the middle section of the model (the center of gravity G of the model lies on the axis of rotation of model)
When the airfoil model performs a sinusoidal pitch oscillation driven by the driving mechanism around the axis of rotation parallel to the z-axis in the flow field, the whole system pitching moment in the middle section of the model satisfies the differential equation
where \(M_{z,d}\) is the driving moment, \(\alpha\) is the transient angle of attack of the pitching motion, t is time, \(\dot{\alpha }\) and \(\ddot{\alpha }\) are the first and second derivatives of the transient angle of attack \(\alpha\) with respect to time, respectively, \(I_{z}\) is the moment of inertia of the middle section of the model around the axis of rotation parallel to the z-axis, \(D\) is the mechanical damping moment coefficient of the oscillation system, k is the moment constant of the elastic hinge, \(M_{z}^{{\ddot{\alpha }}}\) is the coefficient of aerodynamic inertial moment, \(M_{z}^{{\ddot{\alpha }}} = \partial M_{z} /\partial \ddot{\alpha }\), \(M_{z}^{{\dot{\alpha }}}\) is the aerodynamic damping moment coefficient, \(M_{z}^{{\dot{\alpha }}} = \partial M_{z} /\partial \dot{\alpha }\), \(M_{z}^{\alpha }\) is the aerodynamic restoring moment coefficient, \(M_{z}^{\alpha } = \partial M_{z} /\partial \alpha\)。The formula (1) is further transformed into
The left side of Eq. (2) is the overall aerodynamic moment term which needs to be measured directly in the dynamic test, while the first term at the right side is the driving moment term, and the last three terms are the inertial moment, mechanical damping moment and elastic restoring moment on the middle section of the airfoil model. Let \(M_{z} = M_{z}^{{\ddot{\alpha }}} \ddot{\alpha } + M_{z}^{{\dot{\alpha }}} \dot{\alpha } + M_{z}^{\alpha } \alpha\), then Eq. (2) becomes
For the spanwise three-section structure test model in this paper, the built-in force balance is both a measuring device and a transmission device of driving force and moment in the middle section of the model, and \(D = 0,k = 0\), then the moments measured and transmitted by the balance are
The aerodynamic moment is
Before the test, the moment of inertia \(I_{z}\) of the middle section of the model is measured by the compound pendulum method, which gives \(I_{z}\)≈0.3505 kg·m2. In the test, the variation of transient angle of attack \(\alpha\) with time is measured, and the value of \(I_{z} \ddot{\alpha }\) in Eq. (5) can be obtained.
3.2 Elimination of Inertial Force
As shown in Fig. 5, when the model rotates around the axis of rotation with the center of gravity G of the middle section of the model not lying on the axis of rotation, the model will be subjected to centrifugal force. This centrifugal force is included in the measured values of the built-in aerodynamic balance. As mentioned in Sect. 3.1, the measured values are first converted to the coordinate system in which origin is at the axis of rotation of the model. Assuming that the angle between the line connecting the center of gravity G of the middle section of the model with the model's axis of rotation (actually a point in two dimensions) and the x-axis direction is β, and the distance from the center of gravity of the middle section of the model to the axis of rotation is r, then the inertial force of the middle section of the airfoil model can be obtained as,
where \(\dot{\alpha }\) represents the first derivative of \(\alpha\) with respect to time t. Then the pure aerodynamic force of the middle section is \(F = F_{b} - F_{i}\), where \(F_{b}\) is the measured value of the aerodynamic balance. Under the condition of two-dimensional motion, the components of the aerodynamic forces in the x and y directions, i.e., the normal force Y and the axial force X, are represented as
where the subscripts b and i represent the balance measured results and the inertial force, respectively.

Sectional structure diagram of the middle section of the model (the center of gravity G of the model does not lie on the axis of rotation of model)
Finally, the calculated normal force Y and axial force X are converted to the model wind axis system, and the final results of the dynamic lift L and drag D can be obtained as
where \(L,D\) are the lift and drag of the middle section of the model, respectively.
The lift, drag and pitching moment calculated by Eqs. (5) and (9) are translated to the 1/4 chord point of the airfoil model, and nondimensionalized by the air flow dynamic pressure q, the reference area s of the middle section of the model and the chord length c of model to obtain the lift, drag and pitching moment coefficients.
4 Data Processing and Analysis
4.1 Calculation of the First and Second Derivatives of the Angle of Attack with Respect to Time
For the model rotating about the axis of rotation parallel to the z-axis, the calculation of the inertial moment \(I_{z} \ddot{\alpha }\) in Eq. (5) requires the calculation of the second derivative \(\ddot{\alpha }\) of the transient angle of attack \(\alpha\) with respect to time, and the calculation of the inertial force \(F_{i}\) in Eq. (6) requires the calculation of the first derivative \(\dot{\alpha }\) of the instantaneous angle of attack \(\alpha\) with respect to time. To reduce the calculation error of \(\dot{\alpha }\) and \(\ddot{\alpha }\) caused by the gap of driving mechanism of the model oscillating motion, the designed model motion law formula as follows is adopted
to fit the acquired data of angle of attack to get the actual value of \(\alpha_{0} ,A,f,\phi\), where \(\alpha_{0} ,A,f,\phi\) are the average angle of attack, the amplitude of the angle of attack, the frequency, and the initial phase of the airfoil pitching oscillation, respectively. When these values are substituted into Eq. (10), the actual model motion law is accomplished. Then this actual model motion law is used to calculate the first and second derivatives, \(\dot{\alpha }\) and \(\ddot{\alpha }\) of the transient angle of attack \(\alpha\) with respect to time below
Figure 6 compares transient angle of attack acquired by an angle sensor, its first and second derivatives with the fitted angle of attack obtained from theoretical Eq. (10), its first and second derivatives obtained from Eq. (11) where the pitching oscillation parameters of the airfoil are α0 = 0°, A = 10°, f = 0.531 and the data are periodically averaged (i.e., the same-phase values are averaged over several periods to make the curve made up of the averaged values smooth in a period). It can be clearly seen that the differences mainly appear in the short period of time when the transient angle of attack of the pitch oscillation reaches the extreme position and starts to reverse. The second derivative of the periodically averaged angle of attack acquired directly by the angle sensor have two very large peaks in the short period of time of the extreme position, and the data are also unsmooth. This is mainly caused by the gap of the driving mechanism of pitching oscillation. Thus the high-order differentiation of the acquired transient angle of attack will magnify errors, and the calculation of the pitching oscillation inertial moment of the airfoil model will bring larger errors. Therefore, in correcting the inertial force and moment, the transient angle of attack calculated from the actual model motion law of the airfoil model and its first and second time derivatives are used (Eqs. (10), (11)).

Pitch transient angle of attack and derivatives (α0 = 0°, A = 10°, f = 0.531). a Pitch transient angle of attack \(\alpha\). b First derivative of pitching transient angle of attack \(\dot{\alpha }\). c Second derivative of pitching transient angle of attack \(\ddot{\alpha }\)
4.2 Data Filtering Processing
Figure 7 shows the amplitude–frequency diagram of the normal force Y measured by balance at different freestream velocities and oscillating frequencies for the pitching oscillation with an average angle of attack of α0 = 5° and an amplitude of A = 10°. It can be seen that the main frequency of the normal force Y signal is basically distributed below frequency of 16 Hz, but there is large amplitude in frequency range of 16–60 Hz. As the freestream velocity and oscillation frequency increase, the frequency range with large amplitude gradually widens and the amplitude increases. The inherent frequency of the combination of the middle section of the model and the balance is obtained to be 29.297 Hz using airfoil model vibration and accelerometer measurement. This shows that the large amplitude between 16 and 60 Hz is an interference quantity associated with the inherent frequency. Usually, in an aerodynamic test of large-amplitude (θ ≥ 10°) oscillating motion, the 5th to 6th harmonic components of the oscillation frequency must be taken into account. Since the maximum pitching oscillation frequency that can be achieved in this test is 2.188 Hz, the cut-off frequency of the data low-pass filter should be set to be greater than 13 Hz. In the test, the cut-off frequency of the physical low-pass filter is 5 kHz, the digital filtering should be conducted for force data in data processing. The Matlab software is used to design a zero-shift Chebyshev filter. To determine the appropriate cut-off frequency, five cut-off frequencies of 4 Hz, 8 Hz, 16 Hz, 20 Hz, and 40 Hz are selected based on above analysis to digitally filter the normal force Y, axial force X and pitching moment Mz that have not been phase averaged, then the results are compared and analyzed.

Amplitude-frequency figure of normal force Y at different oscillation frequencies and freestream velocities(α0 = 5°, A = 10°)
The analysis of low-pass filtered results at different cut-off frequencies indicate that the results of normal force Y and axial force X whose cut-off frequencies are less than or equal to 16 Hz are smooth and close to each other as shown in Fig. 8 (only results of normal force Y), while the results of Y and X with cut-off frequencies greater than 20 Hz are poor in smoothness. Besides, the result of pitching moment Mz whose cut-off frequency is less than or equal to 8 Hz is smooth and close to each other, while that with cut-off frequency greater than 16 Hz is poor in smoothness.

Filtered results of the normal force Y with different cut-off frequencies (α0 = 0°, A = 10°, V = 25 m/s, f = 1.989 (k = 0.15))
After the normal force Y, axial force X, and pitching moment Mz are processed by low-pass filtering with different cut-off frequencies, the results within all periods are averaged to obtain a result in a single period, and then the result is nondimensionalized. Figure 9 shows the variation of lift with the angle of attack with airfoil pitching oscillation parameters of α0 = 5°, A = 10°, V = 25 m/s, and f = 0.531 (k = 0.04). It can be seen that the normal force coefficient curves with filtering cut-off frequency of 4 Hz and 8 Hz almost coincide, and the normal force coefficient curves with filtering cutoff frequency of 16 Hz and 20 Hz almost coincide. However, the normal force coefficient with the filtering cut-off frequency of 40 Hz is greatly different from the above two sets of curves, and has a larger fluctuation. From Figs. 7 and 8 and previous data analysis, these differences result from whether data contain higher-frequency components. If the filtering cutoff frequency is selected too large, the dynamic aerodynamic performance curves will contain errors of measuring system and will have fluctuations. If the filtering cutoff frequency is selected too small, the dynamic aerodynamic performance results will be distorted due to discarding useful flow information. Comprehensive analysis shows that 16 Hz cut-off frequency for low-pass filtering is appropriate for the normal force Y and axial force X; while for pitching moment, in all filtering cutoff frequencies, the result with 16 Hz cut-off frequency low-pass filtering contains a small amount of interference signal, and the result with 8 Hz cut-off frequency low-pass filtering is smooth and suitable. In the subsequent sections, 16 Hz cut-off frequency low-pass filtering is adopted for both normal force Y and axial force X, and 8 Hz cut-off frequency low-pass filtering for the pitching moment.

Uncorrected lift coefficient filtered with different cut-off frequencies (α0 = 5°, A = 10°, V = 25 m/s, f = 0.531)
5 Results and Analysis
5.1 Analysis of No-Wind Test Results
Figure 10 shows the comparison between the balance measured results and the calculated results of the inertial pitching moment \(I_{z} \ddot{\alpha }\) and the inertial force \(Y_{i} = - mr\dot{\alpha }^{2} \cdot \sin \beta ,X_{i} = - mr\dot{\alpha }^{2} \cdot \cos \beta\) when the airfoil model performs pitching oscillation around the axis of rotation with the oscillation parameters of α0 = 0°, A = 12° and f = 1.061 under the wind-off condition. It can be seen that the y-axis inertial force (i.e. Yi) calculated by the transient angle of attack is less than or equal to 0 N, the maximum value is 0 N, the absolute value is very small, and its frequency is twice the frequency of the pitching oscillation of the airfoil model. The frequency of the balance-measured normal force Yb (the subscript “b” represent balance-measured value) is consistent with the frequency of the pitching oscillation of the airfoil model, and the value of Yb varies from positive to negative at the same pace as the oscillating angle of attack, and the absolute value is much greater than the y-axis inertial force Yi. The inertial force in the x-axis direction (i.e. Xi) and the balance-measured axial force Xb exhibit the same variation trend with time, both frequencies are twice the frequency of the pitching oscillation of the airfoil model, the values are less than or equal to 0 N, and the maximum value of Xi is 0 N. However, in most cases, the absolute value of the axial force Xb is less than the inertial force in the x-axis direction. There is a certain deviation between the balance-measured pitching moment and the calculated inertial moment, and the absolute value of the balance-measured moment is greater. For the test models shown in Figs. 2, 3, and 5, the center of gravity deviates greatly in the x-axis direction and less in the y-axis direction from the axis of rotation (in fact, a point in two-dimensions). Therefore, the centrifugal inertial force generated in the x-axis direction is relatively large, while that in the y-axis direction is relatively small. Comprehensive analysis reveals that for this test model, under no-wind condition, the normal force Yb measured by the balance is mainly aerodynamic force, and the measured axial force Xb and pitching moment Mz,b are also affected by the surrounding air to some extent. Therefore, the net inertial force and moment of the airfoil model in pitching oscillation motion cannot be measured with a balance in a non-vacuum state. Then there will exist errors in the method of correcting the inertial force and moment by subtracting the value measured by the balance under the same pitching oscillation of the airfoil model in wind-off situation to obtain the pure aerodynamic force and pitching moment of the airfoil model in wind-on situation.

Comparison of inertial force and moment with balance measured wind-off results (α0 = 0°, A = 12°, f = 1.061)
5.2 Comparison of Direct Force Measuring with Pressure Measuring Results
Figure 11 presents the comparison of direct force measuring results with pressure measuring results with the natural transition on the model surface under the dynamic test conditions of α0 = 15, A = 15°, f = 1.326, and freestream wind velocity V = 25 m/s. It can be seen that for this kind of deep stall and low frequency condition, the wind-on test results of the lift and drag coefficients from which the theoretically calculated inertial force and pitching moment are deducted are very close to the wind-on test results with those of no-wind test subtracted. This is because the aerodynamic force and pitching moment under wind-off conditions are much smaller than those under wind-on conditions, and thus leading to less influence on the corrected results in wind-on situation. The direct force measuring result of the lift coefficient is very close to the pressure measuring result, and the difference in the shapes of the hysteresis loops is very small except in the upward linear stage of the loop, the lift coefficient of the pressure measurement is about 0.1 higher than that of the direct force measurement. The drag coefficient of pressure measurement is significantly lower than that of the force measurement over a range of angle of attack of \(\alpha < 25^\circ\) during the half loop of going upward and over a range of \(\alpha < 20^\circ\) during the half loop of going downward. Near the maximum angle of attack, the pressure measuring result is very close to the force measuring result. This may be due to the fact that the drag from pressure measurement is a result of an integration of the airfoil surface pressure and thus is only differential pressure drag. Then at small (even moderate) angles of attack, the frictional drag dominates the total drag while pressure drag accounts for a small portion, hence the pressure drag is significantly lower than the total force measured by the force measuring balance. Near the maximum angle of attack, the flow over the airfoil is separated or even the airfoil is stalled and the pressure drag dominates the total drag while the frictional drag accounts a small part, hence the drag measured by the pressure measurement is nearly equal to the total drag measured by the force measuring balance. In short, these results prove that the inertial force and pitching moment calculated by the method in this paper and the correction to aerodynamic forces based on the inertial influence calculation in this paper are reasonable. The correction method can be used to analyze the influence of the parameters of airfoil model pitching oscillation on airfoil dynamic aerodynamic performance.

Comparison of results from both direct force measurement and pressure measurement (α0 = 15°, A = 15°, V = 25 m/s, f = 1.326 Hz)
5.3 Effect of Reduced Frequency
To further verify the reliability of the inertial force and pitching moment correction method, Fig. 12 shows the dynamic aerodynamic characteristics with the airfoil model surface being in a natural transition situation at different reduced frequencies under the conditions of average angle of attack α0 = 15°, amplitude A = 15°, freestream wind velocity V = 25 m/s. The frequencies in the figures are f = 0.531, 0.995, 1.326 and 1.989 Hz, respectively, and the corresponding reduced frequencies are k = 0.04, 0.075, 0.1, 0.15, respectively. From the lift coefficient curve it can be seen that as the reduced frequency increases, the dynamic stall angles of attack increases, and the area of the lift hysteresis loop increases. The shape of the drag curve is similar, but the drag value increases overall. For the dynamic pitching moment characteristics, as the reduced frequency increases, when the angle of attack α < 15°, the area of hysteresis loop is enlarged, when the angle of attack α > 15°, the pitching moment becomes more negative and its absolute value increases. It should also be noted that the shape of the pitching moment curve at oscillation frequency f = 1.989 (k = 0.15) is different from that at other oscillation frequencies.

Dynamic aerodynamic characteristics at different frequencies (α0 = 15°, A = 15°, V = 25 m/s)
6 Conclusions
A correction method for inertial force influence has been discussed in this paper. The main conclusions can be drawn as follows:
-
1.
The measuring data of the balance includes obvious interference signals between the frequency of 16 Hz and 60 Hz, and when the pitching oscillation frequency of the airfoil model increases, the frequency range has a tendency to widen. It is appropriate and correct to use a digital low-pass filter with a cut-off frequency of 16 Hz to filter the lift and drag data, and a digital low-pass filter with a cut-off frequency of 8 Hz to filter the pitching moment.
-
2.
There is large error in the method of eliminating the influence of inertial force and moment by deducting the force measuring result in wind-off situation from the result measured by balance that is usually used in the dynamic direct force measuring test of the airfoil model. It is correct and feasible to use the designed pitching oscillation law of airfoil model to fit the transient angle of attack, calculate the inertial force and moment, and correct the test results of the force and moment measured by the balance.
-
3.
As the reduced frequency of the pitching oscillation increases, the dynamic stall angle of attack increases, and the lift hysteresis loop increases. At the same time, as the reduced frequency increases, the drag increases overall, while the hysteresis loop of the pitching moment is enlarged below the average angle of attack, and its value becomes more negative (with the absolute value increasing) above the average angle of attack.
References
Carr LW (1988) Progress in the analysis prediction of dynamic stall. J Aircr 25(1):6–17
Leishman JG (2000) Principles of helicopter aerodynamics. Cambridge University Press, Cambridge
Conlisk AT (2001) Modern helicopter rotor aerodynamics. Prog Aerosp Sci 37(5):419–476
Ham ND (1968) Aerodynamic loading in a two-dimensional airfoil during dynamic stall. AIAA J 6(10):1927–1934
McCroskey WJ, Pucci SL (1982) Viscous-inviscid interaction on oscillating airfoil in subsonic flow. AIAA J 20(2):167–174
Carr LW, McAlister KW, McCroskey WJ (1977) Analysis of the development of dynamic stall based on oscillating airfoil experiments. National Aeronautics and Space Administration NASA TN D-8382, Washington DC
McAlister KW, Carr LW, McCroskey WJ (1978) Dynamic stall experiments on the NACA0012 Airfoil. National Aeronautics and Space Administration NACA TP 1100, Washington DC
Conger RN, Ramaprian BR (1994) Pressure measurements on a pitching airfoil in a water channel. AAIA J 32(1):108–115
Piziali RA (1994) 2-D and 3-D Oscillating wing aerodynamics for a range of angles of attack including stall. National Aeronautics and Space Administration NASA TM 4632, Washington DC
Xia YS et al (1996) Dynamic of stall characters of NACA0012 airfoil and investigations of dynamic pressure measure methods. Acta Aeronaut Astronaut Sin 17(7):25–30
Hui ZH, Wang L, Xu Q (2012) Dynamic pressure measurement techniques on wind turbine air-foil. J Exp Fluid Mech 26(4):6–10
Panda J, Zaman KBMQ (1994) Experimental investigation of the flow field of an oscillating airfoil and estimation of lift from wake surveys. J Fluid Mech 265:65–95
Werner P et al (1996) Experimental and numerical investigations of dynamic stall on a pitching airfoil. AIAA J 34(5):982–989
Oshima H, Ramaprian BR (1997) Velocity measurements over a pitching airfoil. AIAA J 35(1):119–126
Wang Q, Zhao QJ, Zhao GQ (2014) PIV experiments on flow field characteristic of rotor airfoil dynamic stall and modifications of L-B model. Chin J Theor Appl Mech 46(4):631–635
Tang RY, Hua XM, Wu SJ (1992) Experimental study of dynamic stall on an oscillating airfoil. J Nanjing Aeronaut Inst 24(5):506–512
Tsang KYK (2006) Direct force measurements of a two-dimensional airfoil undergoing dynamic stall. Dissertation, Hong Kong Polytechnic University
Rival D, Tropea C (2010) Characteristics of pitching and plunging airfoils under dynamic-stall conditions. J Aircr 47(1):80–86
Lin YF et al (2012) Experimental investigation of rotor airfoil dynamic stall characteristics. Aeronaut Sci Technol Spec Helicopter Technol 4:25–28
Jiao YQ et al (2020) Three-section airfoil experimental model with integral frame for dynamic force measurement in wind tunnel. China National Intellectual Property Administration, CN201921940956.4, Peking
Funding
Funding was provided by National High-tech Research and Development Program (863 Program) (2012AA051301).
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
An earlier version of this paper was presented at APISAT 2021, Jeju, South Korea, in November 2021.
Rights and permissions
Springer Nature or its licensor holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Jiao, Y., Xiao, C. & Wu, D. Correction Technique of Inertial Force and Moment in Direct Force Measuring Test of Dynamic Aerodynamic Performance of Airfoils. Int. J. Aeronaut. Space Sci. 23, 692–701 (2022). https://doi.org/10.1007/s42405-022-00496-x
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s42405-022-00496-x