
Abstract
This paper proposes a two-grid mixed finite volume element method (TGMFVE) that uses a \(\theta \) time discrete scheme to solve the Cahn–Hilliard equation. This method is separated into two steps. In the first step, the solution of the Cahn–Hilliard equation can be obtained by using a mixed \(\theta \) scheme of the finite volume element method on a coarse grid using an iterative algorithm. The second step involves using the linearized mixed \(\theta \) scheme finite volume element method to solve the equation on a fine grid. The stability analysis of the \(\theta \) scheme of the two-grid mixed finite volume element method has been performed. The priori error estimation for \(L^2\) norm and \(H^1\) norm is also analyzed. The results of theoretical analysis are confirmed by numerical experiments. The results show that the theoretical results match the actual numerical results.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Let \(\varOmega \subset R^d (d=2,3)\) be a polygon-bounded domain. We think over the listed below phase field Cahn–Hilliard equation proposed by Cahn and Hilliard (see [1,2,3]):
where n denotes the unit outward normal of the boundary \(\partial \varOmega \). \(\gamma \) is a prescribed positive constant, and g(x, t) is a source term, f(y) is a given nonlinear one, which satisfies \(\vert f(y_1)-f(y_2)\vert \le C\vert y_1-y_2\vert \) and \(\vert f(y)\) \(\vert \le M(y) \vert y \vert \) where M(y) is a bounded positive function.
Commonly used in fluid interfacial motion analysis, the Cahn–Hillard equation can be utilized to solve relative problems [4,5,6,7,8,9]. Unfortunately, the analytical method is not always able to solve many problems related to the Cahn–Hilliard equation due to the non-linearity and fourth-order differential operator. A numerical analysis is often utilized in the study of the dynamics of the Cahn–Hillard equation. The two main types of discrete methods in the field of PDE are the finite element (FE) and the finite volume element (FVE). These two methods are very flexible and can be used in the analysis of complex computational domain (geometric region). Therefore, FE and FVE are considered the industry’s first choice when it comes to engineering software. They have a wide variety of applications. In [10], Chen et al. derived optimal error estimates for both the first- and second-order SAV schemes with the finite element method that is a Galerkin method with standard Lagrange elements based on a mixed variational formulation in space. Ju et al. [11] presented a residual-based a posteriori error estimate for the finite volume discretization of steady convection-diffusionCreaction equations defined on surfaces in \(R^3\). In [12], Hu et al. proposed a finite volume solver to solve 2D steady Euler equations. In [13], Nazari and Sabzevari derived computational bases for finite element spaces \(\mathcal {S}_{2} \varLambda ^0(\mathcal {T}_h)\) and \(\mathcal {S}_{r} \varLambda ^1(\mathcal {T}_h)\) in each step of the h-adaptive method. Du et al. [14] considered the phase separation on general surfaces by solving the nonlinear Cahn–Hilliard equation using a finite element method. In [15], Jia et al. solved the modified Cahn–Hilliard equation via a large time-stepping mixed finite-element method. Nabet et al. [16] proposed a numerical scheme to solve a diphasic Cahn–Hilliard equation with dynamic boundary conditions. In [17], Appadu et al. constructed four finite volume methods to solve the 2D convective Cahn–Hilliard equation with specified initial condition and periodic boundary conditions. Thus, the finite volume element algorithm appears to be one of the optimal numerical algorithms concerning solving the Cahn–Hilliard equation as well as accurately capturing the dynamic information of phase transition. Besides ensuring the stability of a complicated system used in long-running numerical simulations, it also satisfies some unique physical properties such as mass conservation and energy decreasing progressively. Nevertheless, the traditional FVE algorithm for calculating the equations of Cahn–Hillard uses Newton’s method, which also handles non-linear terms. It is very complex and causes a lot of difficulty when it comes to solving the current complicated phase field problems. For instance, it appears to be used to solve nonlinear equations with low speed and great difficulty. Therefore, it is a challenging problem to reduce the difficulty level of the traditional FVE algorithm by implementing a numerical solution of high-order differential terms and nonlinear terms. Doing so not only effectively improves the accuracy of solving problems compared with traditional FVE algorithm but also saves CPU elapsed time.
The results of numerous numerical tests have indicated that the two grid method is an effective and practical tool for solving the Cahn–Hilliard equation (see, e.g., [18]) when dealing with the complex nonlinear terms. For the first time, the two-grid method [19, 20] was proposed by professor Xu Jinchao as a discrete method about solving asymmetric indeterminate and nonlinear problems. The basic idea of the two-grid method in the calculation of the Cahn–Hilliard equation is as follows. First, a small-scale nonlinear problem is solved discretely in the coarse grid space. At the moment, the number of unknowns within the coarse grid space is few, which makes the calculations scale very small and easy to calculate. Second, the solution of the coarse grid space is projected into the fine grid space by the interpolation method. The problem of linear approximation is to be solved in a finer grid, which makes it easier to solve than the original problem. The use of this method can help reduce computation time and enhance the efficiency of the solution. The computational method is able to demonstrate its feasibility and effectiveness by accomplishing the goal of reducing the order and the computational time.
However, there is not much research on the two-grid finite volume element method. Therefore, we will use the two-grid mixed finite volume element method coupling \(\theta \) time discrete schemes to solve the Cahn–Hilliard equation problem in this paper.
The rest of the paper is organized as follows: Sect. 2 develops a two-grid algorithm for solving the Cahn–Hilliard equation, as well as the corresponding time, spatial discrete schemes and a two-grid numerical solution algorithm. In Sect. 3, the theoretical analysis we provide for discrete two grid schemes includes the analysis of the stability and error. In Sect. 4, some numerical examples are summarized to corroborate the correctness of the result of theoretical derivation. In the end, conclusions are concisely summarized in Sect. 5.
Throughout this paper, we put to use standard notations for Sobolev spaces on \(\varOmega \) as in [21]. For examples, \(L^{2}(\varOmega )\) and \(H^{1}(\varOmega )\) are Hilbert spaces with norms \(\Vert \cdot \Vert _{L^{2}(\varOmega )}\) (\(\Vert \cdot \Vert _0\)) and \(\Vert \cdot \Vert _{H^{1}(\varOmega )}\) (\(\Vert \cdot \Vert _1\)). For \(\forall u\in L^2(\varOmega )\), the \(L^2\) norm for u could be defined as \({\Vert u \Vert }_{L^2(\varOmega )}=(\int _\varOmega {\vert u\vert }^2 \textrm{d}x)^\frac{1}{2}\). For \(\forall u\in H^1(\varOmega )\), the \(H^1\) semi-norm is defined as \({\vert u \vert }_{H^1(\varOmega )}=(\int _\varOmega {\vert \nabla u\vert }^2 \textrm{d}x)^\frac{1}{2}\) and the \(H^1\) norm is defined as \(\Vert u\Vert _{H^1(\varOmega )}=(\Vert u\Vert _{L^2(\varOmega )}^2+{\vert u \vert }_{H^1(\varOmega )}^2)^\frac{1}{2}\).
2 Two-Grid Algorithm for the Cahn–Hilliard Equation
In this section, we would give the discretization of the Cahn–Hilliard equation (1.1) for mixed finite volume element with \(\theta \) scheme. Let \(w= -\gamma \Delta y+f(y)\), the mixed variational formulation of (1.1) is: find (y, w) such that
where \((\cdot ,\cdot )\) is the inner product on \(\varOmega \), i.e. \(\forall u,v\in L^{2}(\varOmega )\), \((u,v)=\int _\varOmega u(x)v(x) \textrm{d}x, x \in \varOmega \).
2.1 Temporal Discretization
We consider the \(\theta \) scheme. Let \(t_k=k\Delta t\) \((k=0,1,2,\ldots ,K)\) be the nodes in the time interval [0, T], where \(t_k\) satisfy \(0=t_0<t_1<t_2<\cdots <t_K=T\) with \(\Delta t=\frac{T}{K}\). From [22], we give \(\theta \) scheme approximation for the function value and the first order derivative value of function \(\phi (t)\in H^1(\varOmega )\) at time \(t_{k-\theta }\) with \(\theta \in [0,\frac{1}{2}]\) as
Based on (2.2), (2.3), we give the semi-discrete scheme for (2.1) as follows: find \((y^{\frac{1}{2}},w^{\frac{1}{2}})\in H^1(\varOmega )\times H^1(\varOmega )\) such that
for \(k=2,3,\ldots ,K\), find \((y^{k-\theta },w^{k-\theta })\in H^1(\varOmega )\times H^1(\varOmega )\) such that
2.2 Spatial Discretization
We use the mixed finite volume element methods in this paper. Let \(T_{h}\) be the primal quasi-uniform triangulation of \(\varOmega \), where h represents the largest one of the set \({h}_{\tau }\) diameters in all subdivision triangles \(\tau \). Based on the primal triangulation, we construct the trial function space \(V_{h}\) which is composed of linear basis function:

Triangular partition and its dual

The control volume \(V_{z}\)
Next, we begin to establish dual subdivision \(T^*_{h}\). In the previous triangulation mentioned above, we make connections in each triangle \(\tau \). Let the interior angle of any of \(T^*_{h}\) be no greater than \(90^{\circ }\), take \(Z_{\tau }\) as the barycenter of \(\tau \), \(Z_{\tau }\) is the intersection of the mid-lines of \(\tau \) three edges, each triangle \(\tau \) can be divided into three subregions \(\tau _z\) (See Fig. 1), where z represents a vertex, also known as node. Let \(\overline{\varOmega }_h\) be a set of the vertices of \(\tau \). We term the new block formed of subregions \(\tau _z\) shared vertex z as control volume \(V_z\) (See Fig. 2), where \(Z_{h}(\tau )\) is a set of the barycenter of \({\tau }\). Let \(M_{h}\) be a set of the midpoints of all interior edges l of \(T_{h}\). Denote by \(Z^0_{h}\) the set of the interior vertices. Connect the points in the sets \(Z_{h}(\tau )\), \(M_{h}\) in turn, we can get a polygon domain \(K_z^*\) surrounded by dotted lines in Fig. 2 around z, \(K_z^*\) is called dual element. All dual elements form \(\varOmega \) new partition \(T^*_{h}\) donated as dual partition, \(Z_{\tau }\) is called the node of dual partition. The barycenter-type dual partition is easy to be introduced for any triangulation \(T_{h}\) and will lead to relatively simple calculations. It is well known that the dual partition \(T^*_{h}\) is quasi-uniform since the triangulation partition \(T_{h}\) is quasi-uniform. That is to say, existing positive constant C makes that
holds, where \(V_z\) is a control volume and \(meas(V_z)\) represents the area of \(V_z\).
From [23], we introduce an interpolation operator \(I_h^*:H^{1}(\varOmega )\rightarrow V_{h}^*\)
where
and \(\psi _z\) is characteristic function of control volume \(V_z\). It is known that \(V_{h}\) is contained in \(H^1(\varOmega )\), so the interpolation operator \(I_{h}^*\) can also act on the function \(v_{h}\in V_{h}\). Similarly from [23], it is known that
From [23], the definition of the bilinear form \(a_h(\cdot ,\cdot )\) is as following:
From Lemma 2.2 in [24], we have
Lemma 2.1
\(I_h^*\) is self-adjoint in regard to the \(L^2\) inner product,
Define
Then \(\Vert \vert \cdot \Vert \vert _0\) and \(\Vert \cdot \Vert _0\) are equivalent. Here the equivalent constants are independent of h.
Due to the interpolation operator \(I^*_{h}\), we write the full-discrete problem of (2.1) as follows: find \((y_h^{\frac{1}{2}},w_h^{\frac{1}{2}})\in V_h\times V_h\) such that
for \(k=2,3,\ldots ,K\), find \((y^{k-\theta }_h,w^{k-\theta }_h)\in V_h\times V_h\) such that
2.3 Two-Grid Algorithm
The above full-discrete scheme would be built for using the two-grid methods. \(T_H\) and \(T_h\) are given as two triangulations of the domain \(\varOmega \) possessing different meshes size H and h and \(H>h\), \(T_H^*\) and \(T_h^*\) be the dual subdivision of \(T_H\) and \(T_h\) respectively. Their associated finite volume element spaces are defined as \(V_H\), \(V_h\), \(V_H^*\) and \(V_h^*\), respectively. And the interpolation operators on \(V_H^*\) and \(V_h^*\) are denoted as \(I_H^*\) and \(I_h^*\), respectively. The two-grid algorithm (cf. [25]) can be shown as follows: for a general nonlinear PDE, for example of the form \(Lu+Nu-f=0\) where Lu and Nu are linear and nonlinear parts, respectively. f is the source term.

Based on \(V_H\), \(V_H^*\) and \(V_h\), \(V_h^*\), the following is a two-grid algorithm that can be used for the Cahn–Hilliard equation.

3 Numerical Analysis for Two Grid Discrete Scheme
Stability and error analysis of the two grid finite volume element with \(\theta \) scheme provided in Algorithm 1 will be shown in this section. The stability of Algorithm 1 is the first thing we shall show.
3.1 Stability
The following are the various lemmas we will be introducing.
Lemma 3.1
For series \(\{u_\mathfrak {h}^k\in V_\mathfrak {h}\}\) (\(k\ge 2\)) and \(\theta \in [0,\frac{1}{2}]\), the following inequality holds
where
and
where \(\mathfrak {h}=h\) or H.
Proof
From (2.3) we have
The operator \(D_{t}u_\mathfrak {h}^{k-\theta }\) can be rewritten as
Then we have
From Lemma 2.1, we have
From the above formula, we can obtain that
Further, when \(\theta =\frac{1}{2}\), we can obviously get
When \(\theta \in [0,\frac{1}{2})\), from Cauchy–Schwarz inequality, we can get that
Similarly we can obtain (3.2), (3.3), (3.5) and (3.6). This completes the proof. \(\square \)
From Lemma 2 in [26], we have
Lemma 3.2
Let \(u_\mathfrak {h},v_\mathfrak {h}\in V_\mathfrak {h}\), \(I_\mathfrak {h}^*\) be defined in (2.6), for \(a_\mathfrak {h}(\cdot ,\cdot )\) given in (2.8), we have
where \(\mathfrak {h}=h\) or H.
Then we consider the following stable inequality.
Theorem 3.3
For the coarse solution pair \(\{y_{H}^{k},w_{H}^{k}\}\in V_{H}\times V_{H}\), the stability for the coupled system (2.13)–(2.14) holds:
For the two-grid solution pair \(\{y_{h}^{k},w_{h}^{k}\}\in V_{h}\times V_{h}\), the stability for the system (2.15)–(2.16) holds:
Proof
-
(I)
In the coupled system, we take \(v_{H}=y_{H}^{k-\theta }\) and \(q_{H}=w_{H}^{k-\theta }\) in (2.14) to get
$$\begin{aligned} \left\{ \begin{array}{ll} \left( D_t y_H^{k-\theta },I_H^*y_{H}^{k-\theta }\right) +a_H\left( w_H^{k-\theta },I^*_H y_{H}^{k-\theta }\right) =\left( g\left( x,t_{k-\theta }\right) ,I_H^*y_{H}^{k-\theta }\right) , \\ \left( w_H^{k-\theta },I_H^*w_{H}^{k-\theta }\right) -\gamma a_H\left( y_H^{k-\theta }, I_H^*w_{H}^{k-\theta }\right) -\left( f\left( y_H^{k-\theta }\right) , I_H^*w_{H}^{k-\theta }\right) =0. \end{array}\right. \end{aligned}$$Further, we can easily get
$$\begin{aligned} a_H\left( y_H^{k-\theta }, I_H^*w_{H}^{k-\theta }\right) =\frac{1}{\gamma }\left( w_H^{k-\theta },I_H^*w_{H}^{k-\theta }\right) -\frac{1}{\gamma }\left( f\left( y_H^{k-\theta }\right) , I_H^*w_{H}^{k-\theta }\right) . \nonumber \\ \end{aligned}$$(3.10)Based on Lemma 3.2, f(y) satisfy Lipschitz continuity and we use Cauchy–Schwarz inequality as well as Young’s inequality to get
$$\begin{aligned}{} & {} \left( D_t y_H^{k-\theta },I_H^*y_{H}^{k-\theta }\right) +\frac{1}{\gamma }\left( w_H^{k-\theta },I_H^*w_{H}^{k-\theta }\right) \nonumber \\{} & {} \quad =\frac{1}{\gamma }\left( f\left( y_H^{k-\theta }\right) , I_H^*w_{H}^{k-\theta }\right) +\left( g\left( x,t_{k-\theta }\right) ,I_H^*y_{H}^{k-\theta }\right) \nonumber \\{} & {} \quad \le \frac{1}{\gamma }\Vert f\left( y_H^{k-\theta }\right) \Vert _{0}\Vert I_H^*w_{H}^{k-\theta }\Vert _{0}+\Vert g\left( x,t_{k-\theta }\right) \Vert _{0}\Vert I_H^*y_{H}^{k-\theta }\Vert _{0}\nonumber \\{} & {} \quad \le C\Vert y_{H}^{k}\Vert _{0}^{2}+C\Vert y_{H}^{k-1}\Vert _{0}^{2}+C\delta \Vert w_{H}^{k-\theta }\Vert _{0}^{2}+\Vert g^k\Vert _{0}^{2}+\Vert g^{k-1}\Vert _{0}^{2}. \end{aligned}$$(3.11)Combine Lemmas 2.1, 3.1 with the inequality (3.11), let \(\delta =\frac{1}{2 C \gamma }\), we have
$$\begin{aligned}{} & {} \frac{1}{4 \Delta t}\left( H[y_{H}^{k}]-H[y_{H}^{k-1}]\right) +\frac{1}{2\gamma }\Vert \vert w_{H}^{k-\theta }\Vert \vert _{0}^{2}\nonumber \\{} & {} \quad \le C\Vert y_{H}^{k}\Vert _{0}^{2}+C\Vert y_{H}^{k-1}\Vert _{0}^{2}+\Vert g^k\Vert _{0}^{2}+\Vert g^{k-1}\Vert _{0}^{2}. \end{aligned}$$(3.12)Sum (3.12) with respect to k from 2 to K to get
$$\begin{aligned} H[y_{H}^{K}]+\frac{2 \Delta t}{\gamma }\sum _{k=2}^{K}\Vert \vert w_{H}^{k-\theta }\Vert \vert _{0}^{2}\le & {} H[y_{H}^{1}]+8\Delta t\sum _{k=1}^{K}\Vert g^k\Vert _{0}^{2}+C\Delta t\sum _{k=1}^{K}\Vert y_{H}^{k}\Vert _{0}^{2}.\nonumber \\ \end{aligned}$$(3.13)In the next step, we need to estimate \(H[y_{H}^{1}]\). We take \(v_{H}=y_{H}^{\frac{1}{2}}\) and \(q_{H}=w_{H}^{\frac{1}{2}}\) in (2.13) to get
$$\begin{aligned} \left\{ \begin{array}{ll} \left( D_t y_H^{\frac{1}{2}},I_H^*y_{H}^{\frac{1}{2}}\right) +a_H\left( w_H^{\frac{1}{2}},I^*_H y_{H}^{\frac{1}{2}}\right) =\left( g\left( x,t_{\frac{1}{2}}\right) ,I_H^*y_{H}^{\frac{1}{2}}\right) , \\ \left( w_H^{\frac{1}{2}},I_H^*w_{H}^{\frac{1}{2}}\right) -\gamma a_H\left( y_H^{\frac{1}{2}}, I_H^*w_{H}^{\frac{1}{2}}\right) -\left( f\left( y_H^{\frac{1}{2}}\right) , I_H^*w_{H}^{\frac{1}{2}}\right) =0. \end{array}\right. \end{aligned}$$Further, we can easily get
$$\begin{aligned} a_H\left( y_H^{\frac{1}{2}}, I_H^*w_{H}^{\frac{1}{2}}\right) =\frac{1}{\gamma }\left( w_H^{\frac{1}{2}},I_H^*w_{H}^{\frac{1}{2}}\right) -\frac{1}{\gamma }\left( f\left( y_H^{\frac{1}{2}}\right) , I_H^*w_{H}^{\frac{1}{2}}\right) . \end{aligned}$$and on the basis of Lemma 3.2, f(y) satisfy Lipschitz continuity and we use Cauchy–Schwarz inequality as well as Young’s inequality to get
$$\begin{aligned}{} & {} \left( D_t y_H^{\frac{1}{2}},I_H^*y_{H}^{\frac{1}{2}}\right) +\frac{1}{\gamma }\left( w_H^{\frac{1}{2}},I_H^*w_{H}^{\frac{1}{2}}\right) \nonumber \\{} & {} \quad =\frac{1}{\gamma }\left( f\left( y_H^{\frac{1}{2}}\right) , I_H^*w_{H}^{\frac{1}{2}}\right) +\left( g\left( x,t_{\frac{1}{2}}\right) ,I_H^*y_{H}^{\frac{1}{2}}\right) \nonumber \\{} & {} \quad \le C\Vert y_{H}^{1}\Vert _{0}^{2}+C\Vert y_{H}^{0}\Vert _{0}^{2}+C\delta \Vert w_{H}^{\frac{1}{2}}\Vert _{0}^{2} +\frac{1}{2}\Vert g^1\Vert _{0}^{2}+\frac{1}{2}\Vert g^{0}\Vert _{0}^{2}. \end{aligned}$$(3.14)Combine (2.2), (2.3) with the inequality (3.14), let \(\delta =\frac{1}{2 C \gamma }\), we have
$$\begin{aligned}{} & {} \frac{1}{2 \Delta t}\Vert \vert y_{H}^{1}\Vert \vert _0^2+\frac{1}{2 \gamma }\Vert \vert w_H^\frac{1}{2}\Vert \vert _0^2 \\{} & {} \quad \le C\Vert y_{H}^{1}\Vert _{0}^{2}+C\Vert y_{H}^{0}\Vert _{0}^{2}+\frac{1}{2}\Vert g^1\Vert _{0}^{2}+\frac{1}{2}\Vert g^{0}\Vert _{0}^{2}. \end{aligned}$$In the light of (3.13), we further get
$$\begin{aligned}{} & {} H[y_{H}^{K}]+\frac{2 \Delta t}{\gamma }\sum _{k=2}^{K}\Vert \vert \omega _{H}^{k-\theta }\Vert \vert _{0}^{2}\\{} & {} \quad \le H[y_{H}^{1}]+8\Delta t\sum _{k=1}^{K}\Vert g^k\Vert _{0}^{2}+C\Delta t\sum _{k=1}^{K}\Vert y_{H}^{k}\Vert _{0}^{2}\\{} & {} \quad \le C\Vert y_{H}^{0}\Vert _{0}^{2}+C\Delta t\sum _{k=0}^{K}\Vert g^k\Vert _{0}^{2}+C\Delta t\sum _{k=1}^{K}\Vert y_{H}^{k}\Vert _{0}^{2}. \end{aligned}$$Using Gronwall lemma for the above inequality, we complete the proof of the inequality (3.7).
-
(II)
For the fine grid system (2.16), we take \(v_{h}=y_{h}^{k-\theta }\) and \(q_{h}=w_{h}^{k-\theta }\) to get
$$\begin{aligned} \left\{ \begin{array}{l} \left( D_t y_h^{k-\theta },I_h^*y_{h}^{k-\theta }\right) +a_h\left( w_h^{k-\theta },I^*_h y_{h}^{k-\theta }\right) \\ \quad =\left( g\left( x,t_{k-\theta }\right) ,I_h^*y_{h}^{k-\theta }\right) , \\ \left( w_h^{k-\theta },I_h^*w_{h}^{k-\theta }\right) -\gamma a_h\left( y_h^{k-\theta }, I_h^*w_{h}^{k-\theta }\right) -\left( \left( 1-\theta \right) \mathfrak {s}\left( y_{h}^{k},y_{H}^{k}\right) +\theta f\left( y_{h}^{k-1}\right) ,I_h^*w_{h}^{k-\theta }\right) \\ \quad =0. \end{array}\right. \end{aligned}$$Further, we can easily get
$$\begin{aligned} a_h\left( y_h^{k-\theta }, I_h^*w_{h}^{k-\theta }\right)= & {} \frac{1}{\gamma }\left( w_h^{k-\theta },I_h^*w_{h}^{k-\theta }\right) \nonumber \\{} & {} -\frac{1}{\gamma }\left( \left( 1-\theta \right) \mathfrak {s}\left( y_{h}^{k},y_{H}^{k}\right) +\theta f\left( y_{h}^{k-1}\right) , I_h^*w_{h}^{k-\theta }\right) .\nonumber \\ \end{aligned}$$(3.15)Based on Lemma 3.2, f(y) satisfy Lipschitz continuity and we use Cauchy–Schwarz inequality as well as Young’s inequality to get
$$\begin{aligned}{} & {} \left( D_t y_h^{k-\theta },I_h^*y_{h}^{k-\theta }\right) +\frac{1}{\gamma }\left( w_h^{k-\theta },I_h^*w_{h}^{k-\theta }\right) \nonumber \\{} & {} \quad =\frac{1}{\gamma }\left( \left( 1-\theta \right) \mathfrak {s}\left( y_{h}^{k},y_{H}^{k}\right) +\theta f\left( y_{h}^{k-1}\right) , I_h^*w_{h}^{k-\theta }\right) +\left( g\left( x,t_{k-\theta }\right) ,I_h^*y_{h}^{k-\theta }\right) \nonumber \\{} & {} \quad \le C\Vert y_{H}^{k}\Vert _{0}^{2}+C\Vert y_{h}^{k}\Vert _{0}^{2}+C\Vert y_{h}^{k-1}\Vert _{0}^{2}+C\delta \Vert w_{h}^{k-\theta }\Vert _{0}^{2}+\Vert g^k\Vert _{0}^{2}+\Vert g^{k-1}\Vert _{0}^{2}.\nonumber \\ \end{aligned}$$(3.16)Combine Lemmas 2.1, 3.1, take and the inequality (3.16), let \(\delta =\frac{1}{2 C \gamma }\), we have
$$\begin{aligned}{} & {} \frac{1}{4 \Delta t}\left( H[y_{h}^{k}]-H[y_{h}^{k-1}]\right) +\frac{1}{2\gamma }\Vert \vert w_{h}^{k-\theta }\Vert \vert _{0}^{2}\nonumber \\{} & {} \quad \le C\Vert y_{H}^{k}\Vert _{0}^{2}+C\Vert y_{h}^{k}\Vert _{0}^{2}+C\Vert y_{h}^{k-1}\Vert _{0}^{2}+\Vert g^k\Vert _{0}^{2}+\Vert g^{k-1}\Vert _{0}^{2}. \end{aligned}$$(3.17)Sum (3.17) with respect to k from 2 to K to get
$$\begin{aligned}{} & {} H[y_{h}^{K}]+\frac{2 \Delta t}{\gamma }\sum _{k=2}^{K}\Vert \vert w_{h}^{k-\theta }\Vert \vert _{0}^{2}\nonumber \\{} & {} \quad \le H[y_{h}^{1}]+8\Delta t\sum _{k=1}^{K}\Vert g^k\Vert _{0}^{2}+C\Delta t\sum _{k=2}^{K}\Vert y_{H}^{k}\Vert _{0}^{2}+C\Delta t\sum _{k=1}^{K}\Vert y_{h}^{k}\Vert _{0}^{2}.\qquad \end{aligned}$$(3.18)For \(H[y_{h}^{1}]\), using the similar process to that as above, and applying Lemma 3.1, we have
$$\begin{aligned}{} & {} \frac{1}{1-\theta }\Vert \vert y_{h}^{K}\Vert \vert _{0}^{2}+\frac{2 \Delta t}{\gamma }\sum _{k=2}^{K}\Vert \vert w_{h}^{k-\theta }\Vert \vert _{0}^{2}\nonumber \\{} & {} \quad \le C\Vert y_{h}^{0}\Vert _{0}^{2}+C\Delta t\sum _{k=0}^{K}\Vert g^k\Vert _{0}^{2}+C\Delta t\sum _{k=1}^{K}\Vert y_{H}^{k}\Vert _{0}^{2}+C\Delta t\sum _{k=1}^{K}\Vert y_{h}^{k}\Vert _{0}^{2}.\qquad \qquad \end{aligned}$$(3.19)Using Gronwall lemma and the conclusion of (3.7) for the above inequality, we complete the proof of the inequality (3.8).
-
(III)
Now we give the estimate of inequality (3.9). Take \(v_{h}=w_{h}^{k-\theta }\) and \(q_{h}=D_t y_{h}^{k-\theta }\) in (2.16) to get
$$\begin{aligned} \left\{ \begin{array}{ll} \left( D_t y_h^{k-\theta },I_h^*w_{h}^{k-\theta }\right) +a_h\left( w_h^{k-\theta },I^*_h w_{h}^{k-\theta }\right) =\left( g\left( x,t_{k-\theta }\right) ,I_h^*w_{h}^{k-\theta }\right) , \\ \left( w_h^{k-\theta },I_h^*D_t y_{h}^{k-\theta }\right) -\gamma a_h\left( y_h^{k-\theta }, I_h^*D_t y_{h}^{k-\theta }\right) -\left( {\mathfrak {T}}\left( y_h^k,y_H^k,y_h^{k-1}\right) ,I_h^*D_t y_{h}^{k-\theta }\right) =0. \end{array}\right. \end{aligned}$$Subtract the above formula, from (2.9) we have
$$\begin{aligned}{} & {} a_h\left( w_h^{k-\theta },I^*_h w_{h}^{k-\theta }\right) +\gamma a_h\left( y_h^{k-\theta }, I_h^*D_t y_{h}^{k-\theta }\right) \nonumber \\{} & {} \quad =\left( g\left( x,t_{k-\theta }\right) ,I_h^*w_{h}^{k-\theta }\right) -\left( \left( 1-\theta \right) \mathfrak {s}\left( y_{h}^{k},y_{H}^{k}\right) +\theta f\left( y_{h}^{k-1}\right) ,I_h^*D_t y_{h}^{k-\theta }\right) .\nonumber \\ \end{aligned}$$(3.20)We use Cauchy–Schwarz inequality as well as Young’s inequality for the above equation, and f(y) satisfy Lipschitz continuity
$$\begin{aligned}{} & {} a_h\left( w_h^{k-\theta },I^*_h w_{h}^{k-\theta }\right) +\gamma a_h\left( y_h^{k-\theta }, I_h^*D_t y_{h}^{k-\theta }\right) \nonumber \\{} & {} \quad \le \Vert g\left( x,t_{k-\theta }\right) \Vert _0\Vert I_h^*w_{h}^{k-\theta }\Vert _0+\Vert \left( 1-\theta \right) \mathfrak {s}\left( y_{h}^{k},y_{H}^{k}\right) +\theta f\left( y_{h}^{k-1}\right) \Vert _0\Vert I_h^*D_t y_{h}^{k-\theta }\Vert _0\nonumber \\{} & {} \quad \le C\Vert g^k\Vert _{0}^{2}+C\Vert g^{k-1}\Vert _{0}^{2}+C\delta \Vert w_{h}^{k-\theta }\Vert _{0}^{2}+C\Vert y_{H}^{k}\Vert _{0}^{2}+C\Vert y_{h}^{k}\Vert _{0}^{2}+C\Vert y_{h}^{k-1}\Vert _{0}^{2}\nonumber \\{} & {} \quad \quad +C\Vert D_t y_{h}^{k-\theta }\Vert _{0}^{2}. \end{aligned}$$(3.21)Combine Lemmas 3.1, 3.2 with the inequality (3.21) and take \(\delta \) as suitable constant, we can get
$$\begin{aligned}{} & {} \frac{\gamma }{4 \Delta t}(\hat{H}[y_{h}^{k}]-\hat{H}[y_{h}^{k-1}])+\vert w_{h}^{k-\theta }\vert _{1}^{2}\nonumber \\{} & {} \quad \le C\Vert g^k\Vert _{0}^{2}+C\Vert g^{k-1}\Vert _{0}^{2}+C\Vert y_{H}^{k}\Vert _{0}^{2}+C\Vert y_{h}^{k}\Vert _{0}^{2}+C\Vert y_{h}^{k-1}\Vert _{0}^{2}+C\Vert D_t y_{h}^{k-\theta }\Vert _{0}^{2}.\nonumber \\ \end{aligned}$$(3.22)Sum (3.22) with respect to k from 2 to K to get
$$\begin{aligned}{} & {} \hat{H}[y_{h}^{K}]+\frac{4 \Delta t}{\gamma }\sum _{k=2}^{K}\vert w_{h}^{k-\theta }\vert _{1}^{2}\nonumber \\{} & {} \quad \le \hat{H}[y_{h}^{1}] +C\Delta t\sum _{k=2}^{K}\Vert g^k\Vert _{0}^{2}+C\Delta t\sum _{k=2}^{K}\Vert g^{k-1}\Vert _{0}^{2}+C\Delta t\sum _{k=2}^{K}\Vert y_{H}^{k}\Vert _{0}^{2}\nonumber \\{} & {} \quad \quad +C\Delta t\sum _{k=2}^{K}\Vert y_{h}^{k}\Vert _{0}^{2}+C\Delta t\sum _{k=2}^{K}\Vert y_{h}^{k-1}\Vert _{0}^{2}+C\Delta t\sum _{k=2}^{K}\Vert D_t y_{h}^{k-\theta }\Vert _{0}^{2}. \end{aligned}$$(3.23)Then we need to estimate \(\Vert D_t y_{h}^{k-\theta }\Vert _{0}\). For \(k-2,k-1,k\), let \(\theta =0\) in the second formula of (2.16)
$$\begin{aligned} \left\{ \begin{array}{l} \left( w_h^{k},I_h^*q_h\right) -\gamma a_h\left( y_h^{k}, I_h^*q_h\right) =\left( \mathfrak {s}\left( y_h^k,y_H^k\right) ,I_h^*q_h\right) , \\ \left( w_h^{k-1},I_h^*q_h\right) -\gamma a_h\left( y_h^{k-1}, I_h^*q_h\right) =\left( \mathfrak {s}\left( y_h^{k-1},y_H^{k-1}\right) ,I_h^*q_h\right) ,\\ \left( w_h^{k-2},I_h^*q_h\right) -\gamma a_h\left( y_h^{k-2}, I_h^*q_h\right) =\left( \mathfrak {s}\left( y_h^{k-2},y_H^{k-2}\right) ,I_h^*q_h\right) . \end{array}\right. \end{aligned}$$Then from (2.2), we have
 (3.24)
(3.24)Taking \(q_{h}=w_{h}^{k-\theta }\) in (3.24), \(v_{h}=\gamma D_t y_{h}^{k-\theta }\) in the first formula of (2.16) and adding the resulting relations, we obtain
$$\begin{aligned}{} & {} \left( D_t w_{h}^{k-\theta },I_h^*w_{h}^{k-\theta }\right) +\gamma \left( D_t y_{h}^{k-\theta },I_h^*D_t y_{h}^{k-\theta }\right) \nonumber \\{} & {} \quad =\gamma \left( g\left( x,t_{k-\theta }\right) ,I_h^*D_t y_{h}^{k-\theta }\right) +\frac{\left( 3-2\theta \right) }{2 \Delta t}\left( \mathfrak {s}\left( y_h^k,y_H^k\right) ,I_h^*w_{h}^{k-\theta }\right) \nonumber \\{} & {} \quad \quad -\frac{\left( 4-4\theta \right) }{2 \Delta t}\left( \mathfrak {s}\left( y_h^{k-1},y_H^{k-1}\right) ,I_h^*w_{h}^{k-\theta }\right) +\frac{\left( 1-2\theta \right) }{2 \Delta t}\left( \mathfrak {s}\left( y_h^{k-2},y_H^{k-2}\right) ,I_h^*w_{h}^{k-\theta }\right) .\nonumber \\ \end{aligned}$$(3.25)From Lemmas 3.1, 3.2, 2.1 and as the process from (3.16) to (3.19), we can get
$$\begin{aligned}{} & {} C\Delta t\sum _{k=2}^{K}\Vert D_t y_{h}^{k-\theta }\Vert _{0}^{2}\le C \Delta t\sum _{k=0}^{K}\Vert g^k\Vert _{0}^{2}+C\Vert y_{H}^{0}\Vert _{0}^{2}+C\Vert y_{h}^{0}\Vert _{0}^{2}. \end{aligned}$$(3.26)Combine (3.26) and (3.23), we can arrive at the conclusion (3.9). \(\square \)

3.2 Error Analysis
The Ritz projection operator from [27] should be given to us as the first step in carrying out the error analysis.
Lemma 3.4
Define the Ritz projection operator \(R_{\mathfrak {h}}:H^1(\varOmega )\rightarrow V_{\mathfrak {h}}\) as
with the estimate inequality
where \(\mathfrak {h}=h\) or H.
In the following, we would show the error estimation between finite volume element solution and semi-discrete solution.
Theorem 3.5
Let \(y^k, w^k\) be the solution of semi-system (2.4)–(2.5), \((y_H^k, w^k_H)\) be the coarse grid solution of system (2.13)–(2.14), \((y_h^k,w_h^k)\) be the fine grid solution of system (2.15)–(2.16), respectively. With \(y_h^0=R_hy_0\), \(y_H^0=R_H y_0\), there exists a constant C independent of \(h,H,\Delta t\), such that
Proof
-
(I)
In the coarse grid, let \(y^{k}_H-y^k=y^k_H-R_Hy^k+R_Hy^k-y^k=\sigma ^{y,k,H}+\rho ^{y,k,H}\), and \(w_H^k-w^k=w_H^k-R_H w^k+R_H w^k-w^k=\sigma ^{w,k,H}+\rho ^{w,k,H}\). Combine the definition of Ritz projection operator (3.27) and (2.14), we can get
$$\begin{aligned}{} & {} (D_t\sigma ^{y,k-\theta ,H}, I_H^*v_H)+a_H(\sigma ^{w,k-\theta ,H},I_H^*v_H)\nonumber \\{} & {} \quad = (\partial _ty^{k-\theta }-D_tR_Hy^{k-\theta }, I_H^*v_H), \end{aligned}$$(3.31)and
$$\begin{aligned}{} & {} (\sigma ^{w,k-\theta ,H}, I_H^* q_H)-\gamma a_H(\sigma ^{y,k-\theta ,H}, I_H^*q_H)\nonumber \\{} & {} \quad = (f(y_H^{k-\theta })-f(y^{k-\theta }), I_H^*q_H)+(w^{k-\theta }-R_H w^{k-\theta }, I_H^*q_H). \end{aligned}$$(3.32)Let \(v_H=\sigma ^{y,k-\theta ,H}\) in (3.31), \(q_H=\frac{\sigma ^{w,k-\theta ,H}}{\gamma }\) in (3.32), and add two formulas, we have
$$\begin{aligned}{} & {} (D_t \sigma ^{y,k-\theta ,H}, I_H^* \sigma ^{y,k-\theta ,H})+\frac{1}{\gamma }(\sigma ^{w,k-\theta ,H}, I_H^*\sigma ^{w,k-\theta ,H})\\{} & {} \quad \quad +a_H(\sigma ^{w,k-\theta ,H}, I_H^*\sigma ^{y,k-\theta ,H})-a_H(\sigma ^{y,k-\theta ,H}, I_H^*\sigma ^{w,k-\theta ,H}) \\{} & {} \quad = (\partial _ty^{k-\theta }-D_tR_Hy^{k-\theta }, I_H^*\sigma ^{y,k-\theta ,H})+\frac{1}{\gamma }(f(y_H^{k-\theta })-f(y^{k-\theta }), I_H^*\sigma ^{w,k-\theta ,H})\\{} & {} \quad \quad +\frac{1}{\gamma }(w^{k-\theta }-R_H w^{k-\theta }, I_H^*\sigma ^{w,k-\theta ,H}). \end{aligned}$$From Lemma 3.2, we use Cauchy–Schwarz inequality as well as Young’s inequality to get
$$\begin{aligned}{} & {} (D_t \sigma ^{y,k-\theta ,H}, I_H^* \sigma ^{y,k-\theta ,H})+\frac{1}{\gamma }(\sigma ^{w,k-\theta ,H}, I_H^*\sigma ^{w,k-\theta ,H}) \nonumber \\{} & {} \quad = (\partial _ty^{k-\theta }-D_tR_Hy^{k-\theta }, I_H^*\sigma ^{y,k-\theta ,H})+\frac{1}{\gamma }(f(y_H^{k-\theta })-f(y^{k-\theta }), I_H^*\sigma ^{w,k-\theta ,H})\nonumber \\{} & {} \quad \quad +\frac{1}{\gamma }(w^{k-\theta }-R_H w^{k-\theta }, I_H^*\sigma ^{w,k-\theta ,H})\nonumber \\{} & {} \quad \le \frac{C}{\Delta t}\int _{t_{k-2}}^{t_{k}}\Vert (y-R_{H}y)_{t}\Vert _0^{2}\textrm{d}t+C\Vert \sigma ^{y,k-\theta ,H}\Vert _0^{2} +C\Vert \rho ^{w,k-\theta ,H}\Vert _0^{2}+C\delta \Vert \sigma ^{w,k-\theta ,H}\Vert _0^{2}\nonumber \\{} & {} \quad \quad + C(\Vert y^{k}-y_{H}^{k}\Vert _0^{2}+\Vert y^{k-1}-y_{H}^{k-1}\Vert _0^{2}). \end{aligned}$$(3.33)From Lemma 3.1, we know that
$$\begin{aligned} \left( D_t\sigma ^{y,k-\theta ,H},I_H^*\sigma ^{y,k-\theta ,H}\right) \ge \frac{1}{4\Delta t}\left( H[\sigma ^{y,k,H}]-H[\sigma ^{y,k-1,H}]\right) . \end{aligned}$$(3.34)Combine the inequality (3.33), (3.34), Lemma 2.1 and let \(\delta \) as a suitable value, we can get
$$\begin{aligned}{} & {} \frac{1}{4\Delta t}\left( H[\sigma ^{y,k,H}]-H[\sigma ^{y,k-1,H}]\right) +\frac{1}{\gamma }\Vert \vert \sigma ^{w,k-\theta ,H}\Vert \vert _0^2 \nonumber \\{} & {} \quad \le \frac{C}{\Delta t}\int _{t_{k-2}}^{t_{k}}\Vert \left( y-R_{H}y\right) _{t}\Vert _0^{2}\textrm{d}t+C\Vert \sigma ^{y,k-\theta ,H}\Vert _0^{2} + C\Vert \rho ^{w,k-\theta ,H}\Vert _0^{2} \nonumber \\{} & {} \quad \quad +C\left( \Vert y^{k}-y_{H}^{k}\Vert _0^{2}+\Vert y^{k-1}-y_{H}^{k-1}\Vert _0^{2}\right) . \end{aligned}$$(3.35)Sum (3.35) with respect to k from 2 to K to get
$$\begin{aligned}{} & {} H[\sigma ^{y,K,H}]+\frac{4\Delta t}{\gamma }\sum _{k=2}^{K}\Vert \vert \sigma ^{w,k-\theta ,H}\Vert \vert _0^2 \le H[\sigma ^{y,1,H}] \nonumber \\{} & {} \quad +C\int _{t_{0}}^{t_{K}}\Vert \left( y-R_{H}y\right) _{t}\Vert _0^{2}\textrm{d}t+C \Delta t\sum _{k=2}^{K}\Vert \sigma ^{y,k-\theta ,H}\Vert _0^{2}+C \Delta t\sum _{k=2}^{K}\Vert \rho ^{w,k-\theta ,H}\Vert _0^{2} \nonumber \\{} & {} \quad +C\Delta t\sum _{k=2}^{K}\left( \Vert y^{k}-y_{H}^{k}\Vert _0^{2}+\Vert y^{k-1}-y_{H}^{k-1}\Vert _0^{2}\right) . \end{aligned}$$(3.36)Now we need to give the estimate of \(H[\sigma ^{y,1,H}]\). Combine the definition of Ritz projection operator (3.27) and (2.13), we can get
$$\begin{aligned}{} & {} \left( D_t\sigma ^{y,\frac{1}{2},H}, I_H^*v_H\right) +a_H\left( \sigma ^{w,\frac{1}{2},H},I_H^*v_H\right) \nonumber \\{} & {} \quad =\left( \partial _ty^{\frac{1}{2}}-D_tR_Hy^{\frac{1}{2}}, I_H^*v_H\right) , \end{aligned}$$(3.37)and
$$\begin{aligned}{} & {} \left( \sigma ^{w,\frac{1}{2},H}, I_H^* q_H\right) -\gamma a_H\left( \sigma ^{y,\frac{1}{2},H}, I_H^*q_H\right) \nonumber \\{} & {} \quad = \left( f\left( y_H^{\frac{1}{2}}\right) -f\left( y^{\frac{1}{2}}\right) , I_H^*q_H\right) +\left( w^{\frac{1}{2}}-R_H w^{\frac{1}{2}}, I_H^*q_H\right) . \end{aligned}$$(3.38)We take \(v_H=\sigma ^{y,\frac{1}{2},H}\) in (3.37) and \(q_H=\frac{\sigma ^{w,\frac{1}{2},H}}{\gamma }\) in (3.38), and use a similar derivation to the one of inequality (3.36) to get
$$\begin{aligned}{} & {} \Vert \vert \sigma ^{y,1,H}\Vert \vert _0^{2}+\frac{2 \Delta t}{\gamma }\Vert \vert \sigma ^{w,\frac{1}{2},H}\Vert \vert _0^{2}\nonumber \\{} & {} \quad \le C\int _{t_{0}}^{t_{1}}\Vert \left( y-R_{H}y\right) _{t}\Vert _0^{2}\textrm{d}t+C \Delta t\Vert \sigma ^{y,\frac{1}{2},H}\Vert _0^{2} +C \Delta t\Vert \rho ^{w,\frac{1}{2},H}\Vert _0^{2}+\Vert \vert \sigma ^{y,0,H}\Vert \vert _0^{2}\nonumber \\{} & {} \quad \quad +C\Delta t\left( \Vert y^{1}-y_{H}^{1}\Vert _0^{2}+\Vert y^{0}-y_{H}^{0}\Vert _0^{2}\right) . \end{aligned}$$(3.39)From (3.39) and Lemmas 2.1, 3.1, we easily know that
$$\begin{aligned} \begin{aligned} H[\sigma ^{y,1,H}]={}&2\Vert \vert \sigma ^{y,1,H}\Vert \vert _0^{2}. \end{aligned} \end{aligned}$$(3.40)Combine (3.36), (3.39) with (3.40) to get
$$\begin{aligned}{} & {} H[\sigma ^{y,K,H}]+\frac{2\Delta t}{\gamma }\sum _{k=1}^{K}\Vert \vert \sigma ^{w,k-\theta ,H}\Vert \vert _0^{2} \le C\Vert \vert \sigma ^{y,0,H}\Vert \vert _0^{2} \nonumber \\{} & {} \quad +C\int _{t_{0}}^{t_{K}}\Vert \left( y-R_{H}y\right) _{t}\Vert _0^{2}\textrm{d}t +C \Delta t\sum _{k=1}^{K}\Vert \sigma ^{y,k-\theta ,H}\Vert _0^{2} +C \Delta t\sum _{k=1}^{K}\Vert \rho ^{w,k-\theta ,H}\Vert _0^{2}\nonumber \\{} & {} \quad +C\Delta t\sum _{k=1}^{K}\left( \Vert y^{k}-y_{H}^{k}\Vert _0^{2}+\Vert y^{k-1}-y_{H}^{k-1}\Vert _0^{2}\right) , \end{aligned}$$(3.41)which is combined with Gronwall lemma, triangle inequality and Lemmas 2.1, 3.4 to arrive at (3.28).
-
(II)
In the fine grid, let \(y^{k}_h-y^k=y^k_h-R_hy^k+R_hy^k-y^k=\sigma ^{y,k,h}+\rho ^{y,k,h}\), and \(w_h^k-w^k=w_h^k-R_h w^k+R_h w^k-w^k=\sigma ^{w,k,h}+\rho ^{w,k,h}\). Firstly we would give the estimation of (3.29). Combine the definition of Ritz projection operator (3.27) and (2.16), we can get
$$\begin{aligned}{} & {} \left( D_t\sigma ^{y,k-\theta ,h}, I_h^*v_h\right) +a_h\left( \sigma ^{w,k-\theta ,h},I_h^*v_h\right) \nonumber \\{} & {} \quad = \left( \partial _ty^{k-\theta }-D_tR_hy^{k-\theta }, I_h^*v_h\right) , \end{aligned}$$(3.42)and
$$\begin{aligned}{} & {} (\sigma ^{w,k-\theta ,h}, I_h^* q_h)-\gamma a_h(\sigma ^{y,k-\theta ,h}, I_h^*q_h)\nonumber \\{} & {} \quad = ((1-\theta )\mathfrak {s}(y_h^k,y_H^k)+\theta f(y_{h}^{k-1})-f(y^{k-\theta }), I_h^*q_h)+(w^{k-\theta }-R_h w^{k-\theta }, I_h^*q_h).\nonumber \\ \end{aligned}$$(3.43)Let \(v_h=\sigma ^{y,k-\theta ,h}\) in (3.42) and \(q_h=\frac{\sigma ^{w,k-\theta ,h}}{\gamma }\) in (3.43), and add two formula, we have
$$\begin{aligned}{} & {} \left( D_t \sigma ^{y,k-\theta ,h}, I_h^* \sigma ^{y,k-\theta ,h}\right) +\frac{1}{\gamma }\left( \sigma ^{w,k-\theta ,h}, I_h^*\sigma ^{w,k-\theta ,h}\right) \nonumber \\{} & {} \quad \quad +a_h\left( \sigma ^{w,k-\theta ,h}, I_h^*\sigma ^{y,k-\theta ,h}\right) -a_h\left( \sigma ^{y,k-\theta ,h}, I_h^*\sigma ^{w,k-\theta ,h}\right) \nonumber \\{} & {} \quad = \left( \partial _ty^{k-\theta }-D_tR_hy^{k-\theta }, I_h^*\sigma ^{y,k-\theta ,h}\right) +\frac{1}{\gamma }\left( w^{k-\theta }-R_h w^{k-\theta }, I_h^*\sigma ^{w,k-\theta ,h}\right) \nonumber \\{} & {} \quad \quad +\frac{1}{\gamma }\left( \left( 1-\theta \right) \mathfrak {s}\left( y_h^k,y_H^k\right) +\theta f\left( y_{h}^{k-1}\right) -f\left( y^{k-\theta }\right) , I_h^*\sigma ^{w,k-\theta ,h}\right) . \end{aligned}$$(3.44)From Lemma 3.2, we use Cauchy–Schwarz inequality as well as Young’s inequality to get
$$\begin{aligned}{} & {} \left( D_t \sigma ^{y,k-\theta ,h}, I_h^* \sigma ^{y,k-\theta ,h}\right) +\frac{1}{\gamma }\left( \sigma ^{w,k-\theta ,h}, I_h^*\sigma ^{w,k-\theta ,h}\right) \nonumber \\{} & {} \quad = \left( \partial _ty^{k-\theta }-D_tR_hy^{k-\theta }, I_h^*\sigma ^{y,k-\theta ,h}\right) +\frac{1}{\gamma }\left( w^{k-\theta }-R_h w^{k-\theta }, I_h^*\sigma ^{w,k-\theta ,h}\right) \nonumber \\{} & {} \quad \quad +\frac{1}{\gamma }\left( \left( 1-\theta \right) \mathfrak {s}\left( y_h^k,y_H^k\right) +\theta f\left( y_{h}^{k-1}\right) -f\left( y^{k-\theta }\right) , I_h^*\sigma ^{w,k-\theta ,h}\right) \nonumber \\{} & {} \quad \le \frac{C}{\Delta t}\int _{t_{k-2}}^{t_{k}}\Vert \left( y-R_{h}y\right) _{t}\Vert _0^{2}\textrm{d}t+C\Vert \sigma ^{y,k-\theta ,h}\Vert _0^{2} +C\Vert \rho ^{w,k-\theta ,h}\Vert _0^{2}+C\delta \Vert \sigma ^{w,k-\theta ,h}\Vert _0^{2}\nonumber \\{} & {} \quad \quad + C\left( \Vert y^{k}-y_{h}^{k}\Vert _0^{2}+ \Vert \left( y^{k}-y_{H}^{k}\right) ^{2}\Vert _0^{2}+ \Vert y^{k-1}-y_{h}^{k-1}\Vert _0^{2}\right) . \end{aligned}$$(3.45)From lemma 3.1, we know that
$$\begin{aligned} \left( D_t\sigma ^{y,k-\theta ,h},I_h^*\sigma ^{y,k-\theta ,h}\right) \ge \frac{1}{4\Delta t}\left( H[\sigma ^{y,k,h}]-H[\sigma ^{y,k-1,h}]\right) . \end{aligned}$$(3.46)Combine the inequality (3.45), (3.46) with Lemma 2.1 and let \(\delta \) as a suitable value, we can get
$$\begin{aligned}{} & {} \frac{1}{4\Delta t}\left( H[\sigma ^{y,k,h}]-H[\sigma ^{y,k-1,h}]\right) +\frac{1}{\gamma }\Vert \vert \sigma ^{w,k-\theta ,h}\Vert \vert _0^2 \nonumber \\{} & {} \quad \le \frac{C}{\Delta t}\int _{t_{k-2}}^{t_{k}}\Vert \left( y-R_{h}y\right) _{t}\Vert _0^{2}\textrm{d}t+C\Vert \sigma ^{y,k-\theta ,h}\Vert _0^{2} + C\Vert \rho ^{w,k-\theta ,h}\Vert _0^{2} \nonumber \\{} & {} \quad \quad +C\left( \Vert y^{k}-y_{h}^{k}\Vert _0^{2}+ \Vert \left( y^{k}-y_{H}^{k}\right) ^{2}\Vert _0^{2}+ \Vert y^{k-1}-y_{h}^{k-1}\Vert _0^{2}\right) . \end{aligned}$$(3.47)Sum (3.47) with respect to k from 2 to K to get
$$\begin{aligned}{} & {} H[\sigma ^{y,K,h}]+\frac{4\Delta t}{\gamma }\sum _{k=2}^{K}\Vert \vert \sigma ^{w,k-\theta ,h}\Vert \vert _0^2 \le H[\sigma ^{y,1,h}] \nonumber \\{} & {} \quad +C\int _{t_{0}}^{t_{K}}\Vert \left( y-R_{h}y\right) _{t}\Vert _0^{2}\textrm{d}t+C \Delta t\sum _{k=2}^{K}\Vert \sigma ^{y,k-\theta ,h}\Vert _0^{2}+C \Delta t\sum _{k=2}^{K}\Vert \rho ^{w,k-\theta ,h}\Vert _0^{2} \nonumber \\{} & {} \quad +C\Delta t\sum _{k=2}^{K}\left( \Vert y^{k}-y_{h}^{k}\Vert _0^{2}+ \Vert \left( y^{k}-y_{H}^{k}\right) ^{2}\Vert _0^{2}+ \Vert y^{k-1}-y_{h}^{k-1}\Vert _0^{2}\right) . \end{aligned}$$(3.48)Now we need to give the estimation of \(H[\sigma ^{y,1,h}]\). Combine the definition of Ritz projection operator (3.27) with (2.15), we can get
$$\begin{aligned}{} & {} \left( D_t\sigma ^{y,\frac{1}{2},h}, I_h^*v_h\right) +a_h\left( \sigma ^{w,\frac{1}{2},h},I_h^*v_h\right) \nonumber \\{} & {} \quad = \left( \partial _ty^{\frac{1}{2}}-D_tR_hy^{\frac{1}{2}}, I_h^*v_h\right) , \end{aligned}$$(3.49)and
$$\begin{aligned}{} & {} \left( \sigma ^{w,\frac{1}{2},h}, I_h^* q_h\right) -\gamma a_h\left( \sigma ^{y,\frac{1}{2},h}, I_h^*q_h\right) \nonumber \\{} & {} \quad = \left( \frac{1}{2}\mathfrak {s}(y_h^1,y_H^1)+\frac{1}{2} f(y_{h}^{0})-f\left( y^{\frac{1}{2}}\right) , I_h^*q_h\right) +\left( w^{\frac{1}{2}}-R_h w^{\frac{1}{2}}, I_h^*q_h\right) .\nonumber \\ \end{aligned}$$(3.50)We take \(v_h=\sigma ^{y,\frac{1}{2},h}\) in (3.49) and \(q_h=\frac{\sigma ^{w,\frac{1}{2},h}}{\gamma }\) in (3.50), and use a similar derivation to the one of inequality (3.48) to get
$$\begin{aligned}{} & {} \Vert \vert \sigma ^{y,1,h}\Vert \vert _0^{2}+\frac{2 \Delta t}{\gamma }\Vert \vert \sigma ^{w,\frac{1}{2},h}\Vert \vert _0^{2} \nonumber \\{} & {} \quad \le C\int _{t_{0}}^{t_{1}}\Vert \left( y-R_{h}y\right) _{t}\Vert _0^{2}\textrm{d}t+C \Delta t\Vert \sigma ^{y,\frac{1}{2},h}\Vert _0^{2} +C \Delta t\Vert \rho ^{w,\frac{1}{2},h}\Vert _0^{2}+\Vert \vert \sigma ^{y,0,h}\Vert \vert _0^{2}\nonumber \\{} & {} \quad \quad +C\Delta t\left( \Vert y^{1}-y_{h}^{1}\Vert _0^{2}+ \Vert \left( y^{1}-y_{H}^{1}\right) ^{2}\Vert _0^{2}+ \Vert y^{0}-y_{h}^{0}\Vert _0^{2}\right) . \end{aligned}$$(3.51)From (3.51) and Lemmas 2.1, 3.1, we easily know that
$$\begin{aligned} \begin{aligned} H[\sigma ^{y,1,h}]={}&2\Vert \vert \sigma ^{y,1,h}\Vert \vert _0^{2}. \end{aligned} \end{aligned}$$(3.52)Combine (3.48), (3.51) with (3.52) to get
$$\begin{aligned}{} & {} H[\sigma ^{y,K,h}]+\frac{2\Delta t}{\gamma }\sum _{k=1}^{K}\Vert \vert \sigma ^{w,k-\theta ,h}\Vert \vert _0^{2} \le C\Vert \vert \sigma ^{y,0,h}\Vert \vert _0^{2} \\{} & {} \quad +C\int _{t_{0}}^{t_{K}}\Vert \left( y-R_{h}y\right) _{t}\Vert _0^{2}\textrm{d}t+C \Delta t\sum _{k=1}^{K}\Vert \sigma ^{y,k-\theta ,h}\Vert _0^{2} +C \Delta t\sum _{k=1}^{K}\Vert \rho ^{w,k-\theta ,h}\Vert _0^{2}\\{} & {} \quad +C\Delta t\sum _{k=1}^{K}\left( \Vert y^{k}-y_{h}^{k}\Vert _0^{2}+ \Vert \left( y^{k}-y_{H}^{k}\right) ^{2}\Vert _0^{2}+ \Vert y^{k-1}-y_{h}^{k-1}\Vert _0^{2}\right) , \end{aligned}$$which is combined with Gronwall lemma, triangle inequality with Lemmas 2.1, 3.4 to arrive at (3.29).
-
(III)
Then we would give the estimation of (3.30). Combine the definition of Ritz projection operator (3.27) with (2.16), we can get
$$\begin{aligned}{} & {} \left( D_t\sigma ^{y,k-\theta ,h}, I_h^*v_h\right) +a_h\left( \sigma ^{w,k-\theta ,h},I_h^*v_h\right) \nonumber \\{} & {} \quad = \left( \partial _ty^{k-\theta }-D_tR_hy^{k-\theta }, I_h^*v_h\right) , \end{aligned}$$(3.53)and
$$\begin{aligned}{} & {} \left( \sigma ^{w,k-\theta ,h}, I_h^* q_h\right) -\gamma a_h\left( \sigma ^{y,k-\theta ,h}, I_h^*q_h\right) \nonumber \\{} & {} \quad = \left( \left( 1-\theta \right) \mathfrak {s}\left( y_h^k,y_H^k\right) +\theta f\left( y_{h}^{k-1}\right) -f\left( y^{k-\theta }\right) , I_h^*q_h\right) \nonumber \\ {}{} & {} \qquad +\left( w^{k-\theta }-R_h w^{k-\theta }, I_h^*q_h\right) . \end{aligned}$$(3.54)Let \(v_h=\sigma ^{w,k-\theta ,h}\) in (3.53) and \(q_h=D_t\sigma ^{y,k-\theta ,h}\) in (3.54) and subtract the resulting equations following (2.9), we have
$$\begin{aligned}{} & {} a_h\left( \sigma ^{w,k-\theta ,h}, I_h^* \sigma ^{w,k-\theta ,h}\right) +\gamma a_h\left( \sigma ^{y,k-\theta ,h}, I_h^*D_t \sigma ^{y,k-\theta ,h}\right) \nonumber \\{} & {} \quad = \left( \partial _ty^{k-\theta }-D_tR_hy^{k-\theta }, I_h^*\sigma ^{w,k-\theta ,h}\right) -\left( w^{k-\theta }-R_h w^{k-\theta }, I_h^*D_t\sigma ^{y,k-\theta ,h}\right) \nonumber \\{} & {} \quad \quad -\left( \left( 1-\theta \right) \mathfrak {s}\left( y_h^k,y_H^k\right) +\theta f\left( y_{h}^{k-1}\right) -f\left( y^{k-\theta }\right) , I_h^*D_t\sigma ^{y,k-\theta ,h}\right) \nonumber \\{} & {} \quad = \text{ I } +\text{ II } +\text{ III }. \end{aligned}$$(3.55)For I and II, from the Cauchy–Schwarz inequality as well as Young’s inequality, we have
$$\begin{aligned}{} & {} \text{ I }+\text{ II }\nonumber \\{} & {} \quad \le \Vert \partial _ty^{k-\theta }-D_tR_hy^{k-\theta }\Vert _0\Vert I_h^*\sigma ^{w,k-\theta ,h}\Vert _0+\Vert w^{k-\theta }-R_h w^{k-\theta }\Vert _0\Vert I_h^*D_t\sigma ^{y,k-\theta ,h}\Vert _0 \nonumber \\{} & {} \quad \le C\Vert D_t\left( \rho ^{y,k-\theta ,h}\right) \Vert _0^{2}+C\delta \Vert \sigma ^{w,k-\theta ,h}\Vert _0^2+\Vert \rho ^{w,k-\theta ,h}\Vert _0^2+C\Vert D_t\sigma ^{y,k-\theta ,h}\Vert _0^2 \nonumber \\{} & {} \quad \le C\Vert \frac{\left( 3-2\theta \right) [\rho ^{y,k,h}-\rho ^{y,k-1,h}]-\left( 1-2\theta \right) [\rho ^{y,k-1,h}-\rho ^{y,k-2,h}]}{2 \Delta t}\Vert _0^{2} \nonumber \\{} & {} \quad \quad +\Vert \rho ^{w,k-\theta ,h}\Vert _0^2+C\Vert D_t\sigma ^{y,k-\theta ,h}\Vert _0^2+C\delta \Vert \sigma ^{w,k-\theta ,h}\Vert _0^2 \nonumber \\{} & {} \quad \le \frac{C}{\Delta t}\int _{t_{k-2}}^{t_{k}}\Vert \left( y-R_{h}y\right) _{t}\Vert _0^{2}\textrm{d}t +\Vert \rho ^{w,k-\theta ,h}\Vert _0^2+C\Vert D_t\sigma ^{y,k-\theta ,h}\Vert _0^2+C\delta \Vert \sigma ^{w,k-\theta ,h}\Vert _0^2. \nonumber \\ \end{aligned}$$(3.56)Use Taylor formula and Cauchy–Schwarz inequality, we can get
$$\begin{aligned}{} & {} \text{ III } \nonumber \\{} & {} \quad \le \Vert (1-\theta )\mathfrak {s}(y_h^k,y_H^k)+\theta f(y_{h}^{k-1})-f(y^{k-\theta })\Vert _0\Vert I_h^*D_t\sigma ^{y,k-\theta ,h}\Vert _0 \nonumber \\{} & {} \quad \le C\Vert y^k-y_h^k\Vert _0^2+C\Vert (y^k-y_H^k)^2\Vert _0^2+C\Vert y^{k-1}-y^{k-1}_h\Vert _0^2 +\Vert D_t\sigma ^{y,k-\theta ,h}\Vert _0^2. \nonumber \\ \end{aligned}$$(3.57)From Lemmas 3.1, 3.2 and (3.55)–(3.57), we can obtain that
$$\begin{aligned}{} & {} \frac{1}{4\Delta t}\left( \hat{H}[\sigma ^{y,k,h}]-\hat{H}[\sigma ^{y,k-1,h}]\right) +\vert \sigma ^{w,k-\theta ,h}\vert ^2_1 \nonumber \\{} & {} \quad \le \frac{C}{\Delta t}\int _{t_{k-2}}^{t_{k}}\Vert (y-R_{h}y)_{t}\Vert _0^{2}\textrm{d}t+\Vert \rho ^{w,k-\theta ,h}\Vert _0^2+C\Vert D_t\sigma ^{y,k-\theta ,h}\Vert _0^2\nonumber \\{} & {} \quad +C\Vert y^k-y_h^k\Vert _0^2+C\Vert (y^k-y_H^k)^2\Vert _0^2+C\Vert y^{k-1}-y^{k-1}_h\Vert _0^2. \end{aligned}$$(3.58)Sum (3.58) with respect to k from 2 to K to get
$$\begin{aligned}{} & {} \hat{H}[\sigma ^{y,K,h}]+{4\Delta t}\sum _{k=2}^{K}\vert \sigma ^{w,k-\theta ,h}\vert _1^2 \le \hat{H}[\sigma ^{y,1,h}]+C\int _{t_{0}}^{t_{K}}\Vert (y-R_{h}y)_{t}\Vert _0^{2}\textrm{d}t \nonumber \\{} & {} \quad +C\Delta t\sum _{k=2}^{K}\Vert D_t\sigma ^{y,k-\theta ,h}\Vert _0^2+C \Delta t\sum _{k=2}^{K}\Vert \rho ^{w,k-\theta ,h}\Vert _0^{2}\nonumber \\{} & {} \quad +C\Delta t\sum _{k=2}^{K}(\Vert y^{k}-y_{h}^{k}\Vert _0^{2}+ \Vert (y^{k}-y_{H}^{k})^{2}\Vert _0^{2}+ \Vert y^{k-1}-y_{h}^{k-1}\Vert _0^{2}). \end{aligned}$$(3.59)Now we need to give the estimate of \(\hat{H}[\sigma ^{y,1,h}]\). Combine the definition of Ritz projection operator (3.27) and (2.15), we can get
$$\begin{aligned}{} & {} \left( D_t\sigma ^{y,\frac{1}{2},h}, I_h^*v_h\right) +a_h\left( \sigma ^{w,\frac{1}{2},h},I_h^*v_h\right) \nonumber \\{} & {} \quad = \left( \partial _ty^{\frac{1}{2}}-D_tR_hy^{\frac{1}{2}}, I_h^*v_h\right) , \end{aligned}$$(3.60)and
$$\begin{aligned}{} & {} \left( \sigma ^{w,\frac{1}{2},h}, I_h^* q_h\right) -\gamma a_h\left( \sigma ^{y,\frac{1}{2},h}, I_h^*q_h\right) \nonumber \\{} & {} \quad = \left( \frac{1}{2}\mathfrak {s}(y_h^1,y_H^1)+\frac{1}{2} f(y_{h}^{0})-f\left( y^{\frac{1}{2}}\right) , I_h^*q_h\right) +\left( w^{\frac{1}{2}}-R_h w^{\frac{1}{2}}, I_h^*q_h\right) .\nonumber \\ \end{aligned}$$(3.61)We take \(v_h=\sigma ^{w,\frac{1}{2},h}\) in (3.60) and \(q_h=D_t\sigma ^{y,\frac{1}{2},h}\) in (3.61), and use the similar derivation to the one of inequality (3.59) to get
$$\begin{aligned}{} & {} \frac{\gamma }{2 \Delta t}\vert \sigma ^{y,1,h}\vert _{1}^{2}+\vert \sigma ^{w,\frac{1}{2},h}\vert _{1}^{2} \nonumber \\{} & {} \quad =\frac{\gamma }{2 \Delta t}\vert \sigma ^{y,0,h}\vert _{1}^{2}+\frac{C}{\Delta t}\int _{t_{0}}^{t_{1}}\Vert (y-R_{h}y)_{t}\Vert _0^{2}\textrm{d}t +\Vert \rho ^{w,\frac{1}{2},h}\Vert _0^2+C\Vert D_t \sigma ^{y,\frac{1}{2},h}\Vert _0^2\nonumber \\{} & {} \quad \quad +C\Vert y^1-y_h^1\Vert _0^2+C\Vert \left( y^1-y_H^1\right) ^2\Vert _0^2+C\Vert y^{0}-y^{0}_h\Vert _0^2. \end{aligned}$$(3.62)Multiply \(2 \Delta t\) on both sides of the above formula
$$\begin{aligned}{} & {} \gamma \vert \sigma ^{y,1,h}\vert _{1}^{2}+2 \Delta t\vert \sigma ^{w,\frac{1}{2},h}\vert _{1}^{2} \nonumber \\{} & {} \quad =\gamma \vert \sigma ^{y,0,h}\vert _{1}^{2}+C\int _{t_{0}}^{t_{1}}\Vert (y-R_{h}y)_{t}\Vert _0^{2}\textrm{d}t +2 \Delta t\Vert \rho ^{w,\frac{1}{2},h}\Vert _0^2+C \Delta t \Vert D_t \sigma ^{y,\frac{1}{2},h}\Vert _0^2 \nonumber \\{} & {} \quad \quad +C\Delta t\Vert y^1-y_h^1\Vert _0^2+C\Delta t \Vert (y^1-y_H^1)^2\Vert _0^2+C\Delta t\Vert y^{0}-y^{0}_h\Vert _0^2. \end{aligned}$$(3.63)From (3.63) and Lemmas 2.1, 3.1, we easily know that
$$\begin{aligned} \begin{aligned} {\hat{H}}[\sigma ^{y,1,h}]={}&2\vert \sigma ^{y,1,h}\vert _{1}^{2}. \end{aligned} \end{aligned}$$(3.64)Combine (3.59), (3.63) with (3.64) to get
$$\begin{aligned}{} & {} {\hat{H}}[\sigma ^{y,K,h}]+2 \Delta t\sum _{k=1}^{K}\vert \sigma ^{w,k-\theta ,h}\vert _{1}^{2} \nonumber \\{} & {} \quad \le C\int _{t_{0}}^{t_{K}}\Vert (y-R_{h}y)_{t}\Vert _0^{2}\textrm{d}t\nonumber \\{} & {} \quad \quad +C\Delta t\sum _{k=2}^{K}\Vert D_t\sigma ^{y,k-\theta ,h}\Vert _0^2+C \Delta t \Vert D_t \sigma ^{y,\frac{1}{2},h}\Vert _0^2+C \Delta t\sum _{k=1}^{K}\Vert \rho ^{w,k-\theta ,h}\Vert _0^{2}\nonumber \\{} & {} \quad \quad +C\Delta t\sum _{k=1}^{K}(\Vert y^{k}-y_{h}^{k}\Vert _0^{2}+ \Vert (y^{k}-y_{H}^{k})^{2}\Vert _0^{2}+ \Vert y^{k-1}-y_{h}^{k-1}\Vert _0^{2})+C\vert \sigma ^{y,0,h}\vert _{1}^{2}.\nonumber \\ \end{aligned}$$(3.65)Then we need to estimate \(\Vert D_t\sigma ^{y,k-\theta ,h}\Vert _0\). Let \(\theta =0\) in (3.54), we have
$$\begin{aligned}{} & {} \left( \sigma ^{w,k,h}, I_h^* q_h\right) -\gamma a_h\left( \sigma ^{y,k,h}, I_h^*q_h\right) \\{} & {} \quad = \left( \mathfrak {s}\left( y_h^k,y_H^k\right) -f\left( y^{k}\right) , I_h^*q_h\right) +\left( w^{k}-R_h w^{k}, I_h^*q_h\right) ,\\{} & {} \quad \quad \left( \sigma ^{w,k-1,h}, I_h^* q_h\right) -\gamma a_h\left( \sigma ^{y,k-1,h}, I_h^*q_h\right) \\{} & {} \quad =\left( \mathfrak {s}\left( y_h^{k-1},y_H^{k-1}\right) -f\left( y^{k-1}\right) , I_h^*q_h\right) +\left( w^{k-1}-R_h w^{k-1}, I_h^*q_h\right) ,\\{} & {} \quad \quad \left( \sigma ^{w,k-2,h}, I_h^* q_h\right) -\gamma a_h\left( \sigma ^{y,k-2,h}, I_h^*q_h\right) \\{} & {} \quad =\left( \mathfrak {s}\left( y_h^{k-2},y_H^{k-2}\right) -f\left( y^{k-2}\right) , I_h^*q_h\right) +\left( w^{k-2}-R_h w^{k-2}, I_h^*q_h\right) . \end{aligned}$$Then from (2.3), we have
$$\begin{aligned}{} & {} \left( D_t \sigma ^{w,k-\theta ,h}, I_h^* q_h\right) -\gamma a_h\left( D_t\sigma ^{y,k-\theta ,h}, I_h^*q_h\right) \nonumber \\{} & {} \quad = \left( \frac{\left( 3-2\theta \right) \sigma ^{w,k,h}-\left( 4-4\theta \right) \sigma ^{w,k-1,h}+\left( 1-2\theta \right) \sigma ^{w,k-2,h}}{2\Delta t}, I_h^* q_h\right) \nonumber \\{} & {} \quad \quad -\gamma a_h\left( \frac{\left( 3-2\theta \right) \sigma ^{y,k,h}-\left( 4-4\theta \right) \sigma ^{y,k-1,h}+\left( 1-2\theta \right) \sigma ^{y,k-2,h}}{2\Delta t}, I_h^*q_h\right) \nonumber \\{} & {} \quad = \left( \frac{\left( 3-2\theta \right) \mathfrak {s}\left( y_h^k,y_H^k\right) -\left( 4-4\theta \right) \mathfrak {s}\left( y_h^{k-1},y_H^{k-1}\right) +\left( 1-2\theta \right) \mathfrak {s}\left( y_h^{k-2},y_H^{k-2}\right) }{2\Delta t}, I_h^*q_h\right) \nonumber \\{} & {} \quad \quad -\left( \frac{\left( 3-2\theta \right) f\left( y^{k}\right) -\left( 4-4\theta \right) f\left( y^{k-1}\right) +\left( 1-2\theta \right) f\left( y^{k-2}\right) }{2\Delta t}, I_h^*q_h\right) \nonumber \\{} & {} \quad \quad +\left( D_t\left( w^{k-\theta }-R_h w^{k-\theta }\right) ,I_h^*q_h\right) . \end{aligned}$$(3.66)Taking \(q_h=\sigma ^{w,k-\theta ,h}\) in (3.66), \(v_h= \gamma D_t \sigma ^{y,k-\theta ,h}\) in (3.53) and adding the resulting relations we obtain
$$\begin{aligned}{} & {} \left( D_t \sigma ^{w,k-\theta ,h}, I_h^* \sigma ^{w,k-\theta ,h}\right) + \gamma \left( D_t \sigma ^{y,k-\theta ,h}, I_h^* D_t \sigma ^{y,k-\theta ,h}\right) \nonumber \\{} & {} \quad = \gamma \left( \partial _ty^{k-\theta }-D_tR_hy^{k-\theta }, I_h^*D_t \sigma ^{y,k-\theta ,h}\right) +\left( D_t\left( w^{k-\theta }-R_h w^{k-\theta }\right) ,I_h^*\sigma ^{w,k-\theta ,h}\right) \nonumber \\{} & {} \quad \quad +\left( \frac{\left( 3-2\theta \right) \mathfrak {s}\left( y_h^k,y_H^k\right) -\left( 4-4\theta \right) \mathfrak {s}\left( y_h^{k-1},y_H^{k-1}\right) }{2\Delta t}, I_h^*\sigma ^{w,k-\theta ,h}\right) \nonumber \\{} & {} \quad \quad +\left( \frac{\left( 1-2\theta \right) \mathfrak {s}\left( y_h^{k-2},y_H^{k-2}\right) }{2\Delta t},I_h^*\sigma ^{w,k-\theta ,h}\right) \nonumber \\{} & {} \quad \quad -\left( \frac{\left( 3-2\theta \right) f\left( y^{k}\right) -\left( 4-4\theta \right) f\left( y^{k-1}\right) +\left( 1-2\theta \right) f\left( y^{k-2}\right) }{2\Delta t}, I_h^*\sigma ^{w,k-\theta ,h}\right) .\nonumber \\ \end{aligned}$$(3.67)From Lemmas 3.1, 2.1, 3.4, 3.2 and as the process from (3.45) to (3.52), we can get
$$\begin{aligned} C\Delta t\sum _{k=2}^{K}\Vert D_t\sigma ^{y,k-\theta ,h}\Vert _0^2+C \Delta t \Vert D_t \sigma ^{y,\frac{1}{2},h}\Vert _0^2\le C (h^2+H^4). \end{aligned}$$(3.68)Then from Lemma 3.4, triangle inequality, (3.68) and (3.65), we can arrive at (3.30). \(\square \)
Next, we would show the main error estimation of this paper.
Theorem 3.6
Let y, w be the solution of system (2.1), \((y_H^k, w^k_H)\) be the coarse grid solution of the system (2.13)–(2.14), \((y_h^k,w_h^k)\) be the fine grid solution of the system (2.15)–(2.16), respectively. With \(y_h^0=R_hy_0\), \(y_H^0=R_H y_0\), there exists a constant C independent of \(h,H,\Delta t\), such that
Proof
Let \(E_{y}^{k-\theta }=y(t_{k-\theta })-y^{k-\theta }\) and \(E_{w}^{k-\theta }=w(t_{k-\theta })-w^{k-\theta }\) and we easily know from systems (2.5) and the mixed variational formulation of (1.1) that for \(k\ge 2\), we can obviously get
and
where
Similarly, we can follow that
and
where
We use the similar analysis as the ones in the Theorem 3.5 to simply get
and
Finally, we combine (3.72) and (3.73) with the result in Theorem 3.5 and use triangle inequality to get the conclusion of Theorem 3.6. \(\square \)
Remark 3.7
From the Theorem 3.6 one also can see that the coarse grid can be much coarser than the fine grid and achieve asymptotically optimal approximation as long as the mesh sizes satisfy \(H\le O(h^{\frac{1}{2}})\), this means that the convergence rate of the space is not lowered. From the second and third inequalities of Theorem 3.6, it can be obtained that the spatial convergence order of error \(\Vert y-y_{h}\Vert _{0}\) and \(\Vert y-y_{h}\Vert _{1}\) is 2 and 1, respectively. The time convergence order of errors \(\Vert y-y_{h}\Vert _{0}\) and \(\Vert y-y_{h}\Vert _{1}\) is 2.
4 Numerical Examples
The two numerical examples given in this section will help us test the efficiency of our computation carried out with respect to the two-grid mixed finite volume element method united with the \(\theta \)-scheme. For the implementation of numerical computations in two-dimensional cases, we take triangle segmentation for spatial domain \(\overline{\varOmega }\). In the following description, the mesh length of the coarse grid is taken as H and h is taken as the mesh length of the fine grid. Then we choose H to satisfy \(h<H \le h^\frac{1}{2}\). Therefore, only the error order of h is shown in our example.
Example 4.1
In (1.1), on the space domain \(\overline{\varOmega }=[0,1]\times [0,1]\) and the time interval [0, 1], we take a term \(f(y)=y^3-y\) that is nonlinear and the exact solution \(y(t,x_1,x_2)=\cos (\pi t)\cos (\pi x_1)\cos (\pi x_2)\), then we give the source term \(g(t,x_1,x_2)= \frac{\partial y}{\partial t}-\Delta (-\gamma \Delta y+f(y))\).
In Tables 1, 2 and 3, by taking \(\theta =0.5\), \(\Delta t = 1/250\), changed \(\gamma =1, 0.1,10\). For testing CPU time, we arrive at the CPU time comparison between two-grid mixed finite volume element (TGMFVE) and mixed finite element (MFE) under same mesh and same order \(H^1\) error result. The radio in Tables 1, 2 and 3 is \(\frac{\mathrm{CPU~time~of~MFE}}{\mathrm{CPU~time~of~TGMFVE}}\). By the contrast between two-grid mixed finite volume element method and mixed finite element method, we see that two-grid mixed finite volume element method can not only economize the CPU time to a great extent, but also get the better convergence rate.
In Tables 4, 5 and 6, with the parameter \(\theta =0.5\), altered \(\gamma =1, 0.1,10\). We arrive at the CPU time comparison between two-grid mixed finite volume element (TGMFVE) and mixed finite element (MFE) under same mesh, same time step and same order \(H^1\) error result. The ratio is also the specific value of CPU time. Compared with a mixed finite element method in these examples, we can see distinctly from the calculated data in Tables 1, 2, 3, 4, 5 and 6 shows clearly the advantages of utilizing the two-grid mixed finite volume element method. It not only effectively reduce calculation error but also achieve the preferable convergence rate.
In Table 7, by taking \(\theta =0.5\), changed \(\gamma =1,0.1,10\). For testing the order of spatial convergence, we keep \(\Delta t=1/250\) unchanged. We arrive at two-grid mixed finite volume element method error estimates (\(L^2\) norm) with second-order convergence rate and error estimates (\(H^1\) norm) with first-order convergence rate.
In Table 8, with the parameter \(\theta =0.5\), altered \(\gamma =1, 0.1,10\). We inspect the rate at which temporal convergence of \(\theta \)-scheme. Here we use the same order reduction method, that is to say, in estimates \(L^2\) norm, while \(\Delta t\) becomes 1/2 of the previous value, H and h change 1/2 of the previous value, we get the \(L^2\) norm convergence order of two-grid mixed finite volume element method is close to 2. Similarly, in estimates \(H^1\) norm, while \(\Delta t\) becomes 1/2 of the previous value, H and h change 1/4 of the previous value, we also attain convergence rate of the second-order (\(H^1\) norm). Our method can reach the calculation accuracy of the second-order convergence rate of time.
Further, we show the figures of numerical solutions. In Figs. 3 and 4, based on the parameters \(\theta =0.5, \gamma =1\) and \(\Delta t=1/250\), under the parameter \(h=0.0221\) the figures of numerical solution \(y_h\) is given at \(t=0.25\) and \(t=1\).
Example 4.2
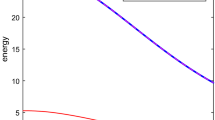
We illustrate the typical phase separation phenomena of the Cahn–Hilliard equation through a numerical example from [28]. The space domains are all the unit square \(\overline{\varOmega }=[0,1]\times [0,1]\), with uniform triangulation thereon. The scale of the coarse triangulation is \(H=0.0625\), the scale of the fine triangulation is \(h=0.0078\), the stepsize is \(\Delta t=0.001\), \(\gamma =4\times 10^{-4}\), taking the source term \(g(t,x_1,x_2)=0\), the nonlinear term \(f(y)=y^3-y\), we choose the numerical example only including the initial value

\(y_{h}\) with \(h=0.0221\), \(\Delta t=\frac{1}{250}\), \(\theta =0.5\) and \(\gamma =1\)

\(y_{h}\) with \(h=0.0221\), \(\Delta t=\frac{1}{250}\), \(\theta =0.5\) and \(\gamma =1\)
Following the computation of our method, we can observe the typical phase transition phenomena: phase separation-coarsening see Figure. 5.

The phase evolution of Example II
5 Conclusion
In this thesis, we develop the two-grid mixed finite-volume element method with \(\theta \) schemes that can solve the Cahn–Hilliard equation. The theoretical conclusions encompassing stability analysis and a priori error estimation in \(L^2\) norm and \(H^1\) norm for the \(\theta \) scheme with two grid mixed finite volume element method have been given, the numerical experiments results exhibited during the verification process are then used to demonstrate the theoretical correctness of the proposed study.
Data Availability
The datasets generated during and/or analysed during the current study are available from the corresponding author on reasonable request.
References
Cahn, J., Hilliard, J.: Free energy of a nonuniform system. I. Interfacial free energy. J. Chem. Phys. 28, 258–267 (1958)
Cahn, J., Hilliard, J.: Free energy of a nonuniform system. II. Thermodynamic basis. J. Chem. Phys. 30, 1121–2214 (1959)
Cahn, J., Hilliard, J.: Free energy of a nonuniform system. III. Nucleation in a two-component incompressible fluid. J. Chem. Phys. 31, 688–699 (1959)
Colturato, M.: Sliding mode control for a diffuse interface tumor growth model coupling a Cahn–Hilliard equation with a reaction–diffusion equation. Math. Methods Appl. Sci. 43, 6598–6626 (2020)
Menshov, I.S., Zhang, C.: Interface capturing method based on the Cahn–Hilliard equation for two-phase flows. Comput. Math. Math. Phys. 60, 472–483 (2020)
Barclay, P., Lukes, J.: Cahn–Hilliard mobility of fluid–fluid interfaces from molecular dynamics. Phys. Fluids 31, 092107 (2019)
Wu, X., Zwieten, G., Zee, K.: Stabilized second-order convex splitting schemes for Cahn–Hilliard models with application to diffuse-interface tumor-growth models. Int. J. Numer. Methods Biomed. Eng. 30, 180–203 (2014)
Ye, Q., Ouyang, Z., Chen, C., Yang, X.: Efficient decoupled second-order numerical scheme for the flow-coupled Cahn–Hilliard phase-field model of two-phase flows. J. Comput. Appl. Math. 405, 113875 (2022)
Wang, X., Li, K., Jia, H.: A linear unconditionally stable scheme for the incompressible Cahn–Hilliard–Navier–Stokes phase-field model. Bull. Iran. Math. Soc. 48, 1991–2017 (2022)
Chen, H., Mao, J., Shen, J.: Optimal error estimates for the scalar auxiliary variable finite-element schemes for gradient flows. Numer. Math. 145, 1–30 (2020)
Ju, L., Tian, L., Wang, D.: A posteriori error estimates for finite volume approximations of elliptic equations on general surfaces. Comput. Methods Appl. Mech. Eng. 198(5/8), 716–726 (2009)
Hu, G., Li, R., Tang, T.: A robust WENO type finite volume solver for steady Euler equations on unstructured grids. Commun. Comput. Phys, 9(3), 627–648 (2011)
Nazari, S., Sabzevari, M.: Computational bases for \(\cal{S} _{r} \Lambda ^1(\mathbb{R} ^2)\) and their application in mixed finite element method. Bull. Iran. Math. Soc. 44, 1141–1153 (2018)
Du, Q., Ju, L., Tian, L.: Finite element approximation of the Cahn–Hilliard equation on surfaces. Comput. Methods Appl. Mech. Eng. 200(29), 2458–2470 (2011)
Jia, H., Hu, H., Meng, L.: A large time-stepping mixed finite method of the modified Cahn–Hilliard equation. Bull. Iran. Math. Soc. 46, 1551–1569 (2020)
Nabet, F.: Finite-volume method for the Cahn–Hilliard equation with dynamic boundary conditions. ESAIM: Proc. Surv. 45(1), 502–511 (2014)
Appadu, A., Djoko, J., Gidey, H., Lubuma, J.: Analysis of multilevel finite volume approximation of 2D convective Cahn–Hilliard equation. Jpn. J. Ind. Appl. Math. 34, 253–304 (2017)
Zhou, J., Chen, L., Huang, Y., Wang, W.: An efficient two-grid scheme for the Cahn–Hilliard equation. Commun. Comput. Phys. 17, 127–145 (2015)
Liu, S., Chen, Y., Huang, Y., Zhou, J.: An efficient two grid method for miscible displacement problem approximated by mixed finite element methods. Comput. Math. Appl. 77, 752–764 (2019)
Tian, Z., Chen, Y., Wang, J.: A two-grid discretization method for nonlinear SchrÖdinger equation by mixed finite element methods. Comput. Math. Appl. 130, 10–20 (2023)
Adams, R.: Sobolev Spaces. Academic, New York (1975)
Yin, B., Liu, Y., Li, H., He, S., Wang, J.: TGMFE algorithm combined with some time second-order schemes for nonlinear fourth-order reaction–diffusion system. Results Appl. Math. 4, 100080 (2019)
Chou, S., Kwak, D., Li, Q.: \(L^p\) error estimates and superconvergence for covolume or finite volume element methods. Numer. Methods Partial Differ. Equ. 19, 463–486 (2003)
Chou, S., Li, Q.: Error estimates in \(L^2\), \(H^1\) and \(L^\infty \) in covolume methods for elliptic and parabolic problems: a unified approach. Math. Comput. 69, 103–120 (1999)
Xu, J.: Two-grid discretization techniques for linear and nonlinear PDEs. SIAM J. Numer. Anal. 33(5), 1 (2018)
Xu, J., Zou, Q.: Analysis of linear and quadratic simplicial finite volume methods for elliptic equations. Numer. Math. 111, 469–492 (2009)
Thomée, V.: Galerkin Finite Element Methods for Parabolic Problems. Springer, Berlin (1984)
Zhang, S., Wang, M.: A nonconforming finite element method for the Cahn–Hilliard equation. J. Comput. Phys. 229, 7361–7372 (2010)
Acknowledgements
This work is supported by Shandong Provincial Natural Science Foundation (No. ZR2022MA005).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
We declare that we have no conflict of interest in this work. We declare that we do not have any commercial or associative interest that represents a conflict of interest in connection with the work submitted.
Additional information
Communicated by Davoud Mirzaei.
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Xu, W., Ge, L. Two-Grid Finite Volume Element Methods for Solving Cahn–Hilliard Equation. Bull. Iran. Math. Soc. 49, 28 (2023). https://doi.org/10.1007/s41980-023-00774-8
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1007/s41980-023-00774-8
Keywords
- Cahn–Hilliard equation
- \(\theta \) scheme
- A priori error estimates
- Stability
- Mixed finite volume element method
- Two-grid