
Abstract
The primary goal of this research is to find a common solution to the equilibrium problem for pseudomonotone bi-functions satisfying the Lipschitz-type condition as well as the fixed point problem for \(\psi -\)strongly quasi-nonexpansive mappings in the context of real Hilbert space by combining two different approaches. A viscosity-type extragradient algorithm is presented for solving the problems listed above. Furthermore, with a set of reasonable assumptions, a strong convergence theorem is presented. The fundamental advantage of the suggested approach is that it does not require the use of a linesearch procedure or the knowledge of Lipschitz-type constants in advance, which is a significant advantage. Moreover, we give a numerical example to support and justify our proposed algorithm. In this sense, the findings of this study generalise and extend certain previously published findings.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Throughout the paper, we let \({\mathcal {H}}\) be a real Hilbert space and \({\mathcal {K}}\) be a non-empty subset of \({\mathcal {H}}\) which is closed and convex.
Recall that in a fixed point problem one needs to find a point \({\mathfrak {z}}\in {\mathcal {K}}\) in such a way that
where \(S:{\mathcal {K}}\rightarrow {\mathcal {H}}\) be a mapping. We indicate the solution set of problem (1.1) by \(\Lambda = \{{\mathfrak {z}}\in {\mathcal {K}}:S{\mathfrak {z}}={\mathfrak {z}}\}.\) Many researchers have studied problem (1.1) and have established various iterative methods to tackle it; see for example [5, 9, 11]. In 2000, Moudafi [25] considered problem (1.1) and proposed well known viscosity approximation method for finding a solution of problem (1.1) as follows: Take \(u_0\in {\mathcal {H}},\) and formulate an iterative sequence \(\{u_n\}\) as follows:
where \(\phi :{\mathcal {H}}\rightarrow {\mathcal {H}}\) is a contraction map and sequence \(\{\psi _n\}\in (0,\,1).\) He demonstrated that the sequence formulated by (1.2) converges strongly to a unique solution \({\mathfrak {z}}\in {\mathcal {K}}.\)
On the other hand, a problem in which one needs to find an element \({\mathfrak {z}}\in {\mathcal {K}}\) in such a way that
where \(g:{\mathcal {K}}\times {\mathcal {K}}\rightarrow {\mathbb {R}}\) be a real valued nonlinear bi-function with \(g({\mathfrak {z}},{\mathfrak {z}})=0\) for all \({\mathfrak {z}}\in {\mathcal {K}}.\) The problem (1.3), was first suggested by Fan [15] and further established by Blum and Oettli [2]. Problem (1.3) is now known as equilibrium problem. The solution set of problem (1.3) is represented by \(\Gamma = \{{\mathfrak {z}}\in {\mathcal {K}}: g({\mathfrak {z}},v)\ge 0,\,\forall \,v\in {\mathcal {K}}\}.\) Many problems such as medical imaging problems, transportation problems, and financial engineering problems can be converted to find solution of problem (1.3), see, for example [14, 21, 28, 29] and the references therein.
In recent years, many iterative algorithms for solving the problem (1.3) have been developed, including the proximal point algorithm (TPPA) [12, 13], the normal S-iteration algorithm [20] the subgradient algorithm (TSA) [3], the extragradient algorithm (TEA) [17], subgradient extragradient algorithm [10, 19] and the gap function algorithm (TGFA) [24]. The explicit extragradient algorithm (TEEA) for solving problem (1.3) for pseudomonotone bi-functions satisfying Lipschitz-type condition (LTC) in real Hilbert space was introduced by Hieu et al. [30] in 2019 which is defined as following. Choose \(u_0\in {\mathcal {K}}\) and \(\tau _0>0,\,\eta \in (0,\,1),\) compute the sequences \(\{w_n\}\) and \(\{u_{n+1}\}\) by
where the step size \(\tau _n\) is given as
They proved the sequence \(\{u_n\}\) generated by (1.4) converges weakly to some point \({\mathfrak {z}}\in \Gamma .\)
In this paper, we consider a problem of approximating a common solution of equilibrium problem for pseudomonotone bi-function satisfying Lipschitz-type condition (LTC) and fixed point problem for \(\psi -\)strongly quasi-nonexpansive mappings in real Hilbert space. i.e., Find \({\mathfrak {z}}\in {\mathcal {K}}\) such that
Inspired and motivated by the work in [25] and Hieu et al. [30], the main goal of this paper is to present a viscosity-type extragradient algorithm which is a combination of extragradient method and viscosity approximation method with a new step size rule for solving problem (1.5) and discuss its convergence analysis. The fundamental advantage of the suggested approach is that it does not require the use of a linesearch procedure or the knowledge of Lipschitz-type constants in advance, which is a significant advantage. In this sense, the findings of this study generalise and extend certain previously published findings.
The following is how this paper is organised: In Sect. 2, we review some of the fundamental definitions and auxiliary results that were used throughout the paper. Our suggested algorithm and its convergence are presented in Sect. 3, and some consequences of our primary findings are discussed in Sect. 4. Moreover, we give a numerical example to support and justify our proposed algorithm in the last section.
2 Preliminaries
Let the inner product and induced norm equipped in Hilbert space \({\mathcal {H}}\) are denoted by \(\langle \cdot ,\cdot \rangle \) and \(\Vert \cdot \Vert ,\) respectively. These convergences are represented by \(\rightharpoonup \) and \(\rightarrow \) symbols, respectively, when the sequence \(\{u_n\} \subset {\mathcal {H}}\) converges weakly and strongly. We start with some definitions about the monotonicity of bi-function \(g:{\mathcal {K}}\times {\mathcal {K}}\rightarrow {\mathbb {R}}:\)
Definition 2.1
[2, 16, 26] The bi-function g is said to be
-
(i)
\(\gamma -\)strongly monotone on \({\mathcal {K}}\) if there exists \(\gamma >0\) such that
$$\begin{aligned} g(u,v) + g(v,u) \le -\gamma \Vert u-v\Vert ^2,\quad \forall \,u,v\in {\mathcal {K}}; \end{aligned}$$ -
(ii)
monotone if
$$\begin{aligned} g(u,v) + g(v,u) \le 0, \quad \forall \, u,v\in {\mathcal {K}}; \end{aligned}$$ -
(iii)
\(\gamma -\)strongly pseudomonotone on \({\mathcal {K}}\) if there exists \(\gamma >0\) such that
$$\begin{aligned} g(u,v)\ge 0 \implies g(v,u)\le -\gamma \Vert u-v\Vert ^2,\quad \forall \,u,v\in {\mathcal {K}}; \end{aligned}$$ -
(iv)
pseudomonotone if
$$\begin{aligned} g(u,v) \ge 0 \implies g(v,u) \le 0,\quad \forall \,u,v\in {\mathcal {K}}; \end{aligned}$$ -
(v)
satisfying the Lipschitz-type condition (LTC) on \({\mathcal {K}}\) if there exists two positive real numbers \(\lambda _1,\lambda _2\) such that
$$\begin{aligned} g(u,w) \le g(u,v)+g(v,w)+\lambda _1\Vert u-v\Vert ^2+\lambda _2\Vert v-w\Vert ^2,\quad \forall \,u,v,w\in {\mathcal {K}}. \end{aligned}$$
Definition 2.2
[18] The metric projection \(P_{{\mathcal {K}}}(u)\) of u onto a closed, convex subset \({\mathcal {K}}\) of \({\mathcal {H}}\) is defined as follows:
Lemma 2.1
[22] Let \(P_{{\mathcal {K}}}(u):{\mathcal {H}}\rightarrow {\mathcal {K}}\) be the metric projection from \({\mathcal {H}}\) onto \({\mathcal {K}}.\) Then
-
(i)
\(\Vert u-P_{{\mathcal {K}}}(v)\Vert ^2+\Vert P_{{\mathcal {K}}}(v)-v\Vert ^2\le \Vert u-v\Vert ^2, \quad \forall u\in {\mathcal {K}},\,v\in {\mathcal {H}},\)
-
(ii)
\(w=P_{{\mathcal {K}}}(u) \iff \langle u-w,v-w\rangle \le 0,\quad \forall \,v\in {\mathcal {K}}.\)
Lemma 2.2
[18] Suppose that \(S:{\mathcal {H}}\rightarrow {\mathcal {H}}\) is a nonlinear mapping. Then \(I-S\) is said to be demiclosed at zero if for any \(\{u_n\}\in {\mathcal {H}},\) the following holds:
Definition 2.3
Let \(S:{\mathcal {H}}\rightarrow {\mathcal {H}}\) be a mapping with \(\Lambda \ne \text{\O }.\) Then \(S:{\mathcal {H}}\rightarrow {\mathcal {H}}\) is said to be
-
(i)
firmly nonexpansive if
$$\begin{aligned} \Vert Su-Sv\Vert ^2\le \langle Su-Sv,u-v\rangle ,\quad \forall \,u,v\in {\mathcal {H}}, \end{aligned}$$or comparatively
$$\begin{aligned} \Vert Su-Sv\Vert ^2\le \Vert u-v\Vert ^2-\Vert (I-S)u-(I-S)v\Vert ^2,\quad \forall \,u,v\in {\mathcal {H}}, \end{aligned}$$ -
(ii)
directed if
$$\begin{aligned} \langle w-Su,u-Su\rangle \le 0,\quad \forall \,w\in \Lambda ,\,u\in {\mathcal {H}}, \end{aligned}$$or comparatively
$$\begin{aligned} \Vert Su-w\Vert ^2\le \Vert u-w\Vert ^2-\Vert u-Su\Vert ^2,\quad \forall \,w\in \Lambda ,\,u\in {\mathcal {H}}, \end{aligned}$$ -
(iii)
\(\psi -\)strongly quasi-nonexpansive with \(\psi >0\) if
$$\begin{aligned} \Vert Su-w\Vert ^2\le \Vert u-w\Vert ^2-\psi \Vert u-Su\Vert ^2,\quad \forall \,w\in \Lambda ,\,u\in {\mathcal {H}}, \end{aligned}$$or comparatively
$$\begin{aligned} \langle Su-u,u-w\rangle \le \dfrac{-1-\psi }{2}\Vert u-Su\Vert ^2,\quad \forall \,w\in \Lambda ,\,u\in {\mathcal {H}}, \end{aligned}$$ -
(iv)
quasi-nonexpansive
$$\begin{aligned} \Vert Su-w\Vert \le \Vert u-w\Vert ,\quad \forall \,w\in \Lambda ,\,u\in {\mathcal {H}}, \end{aligned}$$ -
(v)
\(\beta -\)demicontractive with \(\beta \in [0,\,1)\)
$$\begin{aligned} \Vert Su-w\Vert ^2\le \Vert u-w\Vert ^2+\beta \Vert u-Su\Vert ^2,\quad \forall \,w\in \Lambda ,\,u\in {\mathcal {H}}, \end{aligned}$$or comparatively
$$\begin{aligned} \langle u-w,Su-u\rangle \le \dfrac{\beta -1}{2}\Vert u-Su\Vert ^2,\quad \forall \,w\in \Lambda ,\,u\in {\mathcal {H}}. \end{aligned}$$(2.1)
Recall that the proximal mapping \(\textrm{prox}_{\tau g_1}\) is defined by
where \(g_1:{\mathcal {K}}\rightarrow {\mathbb {R}}\) with a parameter \(\tau >0\) is a proper, convex and lower semicontinuous function .
One can observe the following property of the proximal mapping \(\textrm{prox}_{\tau g_1}\):
Lemma 2.3
[1] For all \(u\in {\mathcal {H}},\,v\in {\mathcal {K}}\) and \(\tau >0,\) the following implication holds:
Remark 2.1
If \(u = \textrm{prox}_{\tau g_1}(u)\) then
Lemma 2.4
[23] Let a sequence \(\{b_n\}\subset {\mathbb {R}}\) such that there exists a subsequence \(\{n_i\}\) of \(\{n\}\) such that \(b_{n_i}\le b_{n_{i+1}}\) for all \(i \in {\mathbb {N}}\). Then there exists an increasing sequence \(\{m_l\}\subset {\mathbb {N}}\) such that \(m_l\rightarrow \infty \) and the following properties are satisfied by all sufficiently large numbers \(l\in {\mathbb {N}}:\)
In fact, \(m_l:= \textrm{max}\{j\le l:b_j\le b_{j+1}\}.\)
Lemma 2.5
[27, 31] Let \(\{b_n\}\) be a sequence of non negative real numbers such that
where \(\psi _n\in (0,\,1)\) and \(\delta _n\subset {\mathbb {R}}\) satisfies the following conditions:
-
(i)
\(\sum _{n=0}^{\infty }\psi _n=\infty ;\)
-
(ii)
\(\lim \limits _{n\rightarrow \infty }\textrm{sup}\delta _n\le 0.\) Then \(\lim \limits _{n\rightarrow \infty }b_n=0.\)
Lemma 2.6
[1] For every \(u,v\in {\mathcal {H}}\) and \(\psi \in {\mathbb {R}},\) the following relations are true:
-
(i)
\(\Vert \psi u+(1-\psi )v\Vert ^2 = \psi \Vert u\Vert ^2+(1-\psi )\Vert v\Vert ^2-\psi (1-\psi )\Vert u-v\Vert ^2,\)
-
(ii)
\(\Vert u+v\Vert ^2\le \Vert u\Vert ^2+2\langle v,u+v\rangle .\)
Assumption 2.1
[30] Let a bi-function \(g : {\mathcal {K}}\times {\mathcal {K}}\rightarrow {\mathbb {R}}\) satisfies the following conditions:
-
G1:
g is pseudomontone on a feasible set \({\mathcal {K}}\) and for all \(u\in {\mathcal {K}},\,g(u; u) = 0;\)
-
G2:
g satisfy the Lipschitz-type condition (LTC) on \({\mathcal {H}}\) with positive constants \(\lambda _1\) and \(\lambda _2\);
-
G3:
\(\lim \limits _{n\rightarrow \infty }\textrm{sup}\,g(u_n,v)\le g({\mathfrak {z}},v)\) for every \(v\in {\mathcal {K}}\) and \(\{u_n\}\subset {\mathcal {K}}\) satisfy \(u_n\rightharpoonup {\mathfrak {z}};\)
-
G4:
g(u, \(\cdot\)) is convex and subdifferentiable on \({\mathcal {K}}\) for every \(u\in {\mathcal {K}}\).
3 Main result
In this section, we provide our main algorithm and discuss its convergence analysis under some mild assumptions. Let \(S:{\mathcal {K}}\rightarrow {\mathcal {H}}\) be a \(\psi -\)strongly quasi-nonexpansive operator such that \(I-S\) is demiclosed at zero. Suppose that \(g:{\mathcal {K}}\times {\mathcal {K}}\rightarrow {\mathbb {R}}\) be a bi-function satisfying Assumptions 2.1 and \(\phi :{\mathcal {H}}\rightarrow {\mathcal {H}}\) be a contraction mapping with constant \(\xi \in [0,\,1).\) The following is the main algorithm that has been presented:
Algorithm 1
(A Viscosity-type Extragradient Algorithm)
Initialization: Choose \(u_0\in {\mathcal {K}}\) and \({\tau }_0>0,\,\eta \in (0,1).\) Let sequence \(\{\psi _n\}\in (0,\,1)\) satisfies the following conditions:
Iterative steps: Given \(u_n\) and \(\tau _n\) are known for \(n\ge 0.\)
Step 1: Compute
If \(u_n=w_n;\) STOP. Otherwise go to step 2.
Step 2: Compute
and set
Set \(n := n + 1\) and return back to Iterative steps.
Remark 3.1
Under the Assumption 2.1 (G2), there exist positive constants \( \lambda _1~ \& ~\lambda _2\) such that
Thus, from the definition of the sequence \(\{\tau _n\},\) this sequence is bounded from below by \(\Big \{\tau _0,\,\dfrac{\eta }{2\textrm{max}\{\lambda _1,\lambda _2\}}\Big \}.\) Moreover, the sequence \(\{\tau _n\}\) is non-increasing monotone. Thus, there exists \(\tau \in {\mathbb {R}}\) such that \(\lim \limits _{n\rightarrow \infty }\tau _n=\tau .\) In fact, from (3.2), if \(g(u_n,v_n)-g(u_n,w_n)-g(w_n,v_n)\le 0\) than \(\tau _{n+1}:=\tau _n.\)
Consequently, we have the following outcomes:
Theorem 3.1
Let a bi-function \(g:{\mathcal {K}}\times {\mathcal {K}}\rightarrow {\mathbb {R}}\) satisfying the Assumptions 2.1. Thus, for each \({\mathfrak {z}}\in \Omega :=\Gamma \cap \Lambda \ne \text{\O },\) we have
Proof
In view of Lemma 2.3 and the definition of sequence \(\{v_n\}\) that
From the equation (3.2), we obtain
which after multiplying both sides by \(\tau _n>0,\) implies that
combining relations (3.4) and (3.5), we obtain
Similarly, from Lemma 2.3 and the definition of the sequence \(\{w_n\},\) we also obtain
From the relations (3.6) and (3.7), we obtain
Thus, by multiplying both sides of relation (3.8) by 2, we obtain
We have the following equalities:
Combining the relations (3.9), (3.10) and (3.11), we obtain
For each \({\mathfrak {z}}\in \Gamma ,\) we have that \(g({\mathfrak {z}},w_n)\ge 0\) and by Assumptions 2.1 (G1) that \(g(w_n,{\mathfrak {z}})\le 0.\) Then using \(v={\mathfrak {z}}\in {\mathcal {K}}\) in relation (3.12), we obtain
\(\square \)
Theorem 3.2
Let a bi-function \(g:{\mathcal {K}}\times {\mathcal {K}}\rightarrow {\mathbb {R}}\) satisfying Assumptions 2.1. Thus, for each \({\mathfrak {z}}\in \Omega :=\Gamma \cap \Lambda \ne \text{\O },\) the sequence \(\{u_n\}\) generated by Algorithm 1 is bounded.
Proof
It is given that \({\mathfrak {z}}\in \Omega .\) Since \(\lim \limits _{n\rightarrow \infty }\tau _n = \tau >0,\)
Thus, there exists \(n_0\ge 1\) such that
From the Theorem 3.1 and relation (3.13), we obtain
From the definition of \(\{u_{n+1}\}\) and due to the fact that \(\phi \) is a contraction with \(\xi \in [0,\,1),\) we have
Combining relations (3.1), (3.13) and (3.15), we obtain
continuing in the same way, we obtain
Thus, we conclude that the sequence \(\{u_n\}\) is bounded. \(\square \)
Theorem 3.3
Let a bi-function \(g:{\mathcal {K}}\times {\mathcal {K}}\rightarrow {\mathbb {R}}\) satisfying Assumptions 2.1. Thus, for each \({\mathfrak {z}}\in \Omega :=\Gamma \cap \Lambda \ne \text{\O },\) the sequence \(\{u_n\}\) generated by Algorithm 1 converges strongly to \({\mathfrak {z}},\) where \({\mathfrak {z}} = P_{\Omega }\phi ({\mathfrak {z}}).\)
Proof
By using Lemma 2.1 (ii), we have
By Lemma 2.6 (i) and Theorem 3.1, we obtain
The rest of the proof shall be divided into two cases:
Case I: Assume that there is a fixed number \(N_1\in {\mathbb {N}}\) such that
Thus, above relation implies that \(\lim \limits _{n\rightarrow \infty }\Vert u_n-{\mathfrak {z}}\Vert \) exists and let \(\lim \limits _{n\rightarrow \infty }\Vert u_n-{\mathfrak {z}}\Vert =l.\) From (3.17), we obtain
Since \(\lim \limits _{n\rightarrow \infty }\Vert u_n-{\mathfrak {z}}\Vert =l\) and \(\lim \limits _{n\rightarrow \infty }\psi _n = 0,\) then from (3.13) and the above relation we obtain
It follows from the above relation that
We can also obtain
and
From relations (3.21) and (3.22), we obtain
Therefore
Using relation (3.18) and the fact that \(\lim \limits _{n\rightarrow \infty }\Vert u_n-{\mathfrak {z}}\Vert \) exists, we obtain
Next, we show that \(\lim \limits _{n\rightarrow \infty }\Vert u_{n+1}-u_n\Vert =0.\) Consider
By using relations (3.1), (3.20) and (3.23), we obtain
Since, the sequences \(\{u_n\}, \{w_n\}\) and \(\{v_n\}\) are bounded. Then there exists a subsequence \(\{u_{n_k}\}\) of \(\{u_n\}\) such that \(\{u_{n_k}\}\rightharpoonup \hat{{\mathfrak {z}}}\in {\mathcal {H}}.\) Thus, by relation (3.23) and Lemma 2.2, we can conclude that \(\hat{{\mathfrak {z}}}\in Fix(T).\) Next, we need to show that \(\hat{{\mathfrak {z}}}\in \Gamma .\) Since \(\Vert u_n-w_n\Vert \rightarrow 0,\) we also have that \(\{w_{n_k}\}\rightharpoonup \hat{{\mathfrak {z}}}.\) Passing to the limit in relation (3.3) as \(k\rightarrow \infty \) and using Assumptions 2.1 (G3), the relation (3.19) and the fact that \(\lim \limits _{n\rightarrow \infty }\tau _n=\tau >0,\) we obtain
On the other hand, by the triangle inequality, we have
Thus, from the boundedness of the sequence \(\{u_n\}\) and the relation (3.20), we get for each \(v\in {\mathcal {K}}\)
Combining the relations (3.25) and (3.26), we get \(g(\hat{{\mathfrak {z}}},v)\ge 0\) for all \(v\in {\mathcal {K}}\) so \(\hat{{\mathfrak {z}}}\in \Gamma .\) Therefore \(\hat{{\mathfrak {z}}}\in \Omega :=\Gamma \cap \Lambda .\) Next, we consider
We have \(\lim \limits _{n\rightarrow \infty }\Vert u_{n+1}-u_n\Vert =0.\) We can deduce that
From Lemma 2.6 (ii) and relation (3.3), we have
It follows from relations (3.28) and (3.29), that
Choose \(n\ge N_2\in {\mathbb {N}}\,(N_2\ge N_1)\) large enough such that \(2\psi _n(1-\xi )<1.\) By using relations (3.29) and (3.30) and applying Lemma 2.5, we conclude that \(\lim \limits _{n\rightarrow \infty }u_n\rightarrow {\mathfrak {z}}.\)
Case II: Assume that there is a subsequence \(\{n_i\}\) of \(\{n\}\) such that
Thus, by Lemma 2.4, there is a sequence \(\{m_k\}\subset {\mathbb {N}}\) as \(\lim \limits _{k\rightarrow \infty }m_k=\infty \) such that
Similar to Case I, the relation (3.17) provides that
By the relations (3.1), (3.13) and (3.31), we obtain
Also, we can obtain as similar to Case I
and
We have to use the same justification as in Case I, such that
By using relations (3.29) and (3.31), we obtain
It follows that
By the relations (3.1) and (3.31), relations (3.37) and (3.39) implies that
Thus, the above relation implies that
Consequently, the sequence \(\{u_n\}\) converges strongly to \({\mathfrak {z}}\in \Omega :=\Gamma \cap \Lambda .\) \(\square \)
4 Applications
Application to pseudomonotone equilibrium problems:
Set \(S = I\) in Algorithm 1, then we have the following strong convergence algorithm for pseudomonotone equilibrium problem:
Corollary 4.1
Assume that \(g:{\mathcal {K}}\times {\mathcal {K}}\rightarrow {\mathbb {R}}\) is satisfying Assumption 2.1. Let the sequence \(\{u_n\},\{w_n\}\) and \(\{v_n\}\) be generated in the following manner: Choose \(u_0\in {\mathcal {K}},\) and \(\tau _0>0,\,\eta \in (0,\,1).\) Compute
and set
Then the sequences \(\{u_n\},\{w_n\}\) and \(\{v_n\}\) converge strongly to the solution \({\mathfrak {z}}\) of \(\Gamma .\)
Application to pseudomonotone variational inequality problems:
Recall that in the problem of classical variational inequality, one needs to find a point \({\mathfrak {z}}\in {\mathcal {K}}\) such that
where \({\mathcal {A}}:{\mathcal {H}}\rightarrow {\mathcal {H}}\) is an operator. We denote the solution set of classical variational inequality by the symbol \(VI({\mathcal {A}},{\mathcal {K}}).\) Set the bi-function \(g(u,v) := \langle {\mathcal {A}}(u),v-u\rangle \) for all \(u,v\in {\mathcal {K}}\) in Algorithm 1, we have
Similarly,
Assumption 4.1
Assume that \({\mathcal {A}}\) is satisfying the following assumptions:
- \({\mathcal {A}}_1\)::
-
\({\mathcal {A}}\) is pseudomonotone on \({\mathcal {K}},\) that is, for all \(u,v\in {\mathcal {K}},\)
$$\begin{aligned} \langle {\mathcal {A}}(u),v-u\rangle \ge 0 \implies \langle {\mathcal {A}}(v), u-v \rangle \le 0. \end{aligned}$$and \(VI({\mathcal {A}},{\mathcal {K}})\) is non-empty.
- \({\mathcal {A}}_2:\):
-
\({\mathcal {A}}\) is Lipschitz continuous on \({\mathcal {K}}\) with \(L>0,\) that is, for all \(u,v\in {\mathcal {K}},\)
$$\begin{aligned} \Vert {\mathcal {A}}(u)-{\mathcal {A}}(v)\Vert \le L\Vert u-v\Vert . \end{aligned}$$ - \({\mathcal {A}}_3:\):
-
\(\lim \limits _{n\rightarrow \infty }\,\textrm{sup}\,\langle {\mathcal {A}}(u_n),v-u_n\rangle \le \langle {\mathcal {A}}({\mathfrak {z}}),v-{\mathfrak {z}}\rangle \) for every \(v\in {\mathcal {K}}\) and \(\{u_n\}\subset {\mathcal {K}}\) satisfying \(u_n\rightharpoonup {\mathfrak {z}}.\)
Many researchers have studied variational inequality problem [8] and have established various iterative methods to tackle it; see for example [4, 6, 7, 32]. We have the following strong convergence theorem about the pseudomonotone variational inequality problem [8]:
Corollary 4.2
Assume that \({\mathcal {A}}:{\mathcal {K}}\rightarrow {\mathcal {H}}\) is satisfying Assumptions 4.1. Let the sequences \(\{u_n\},\{w_n\}\) and \(\{v_n\}\) be generated in the following manner: Choose \(u_0\in {\mathcal {H}}\) and \(\tau _0>0,\,\eta \in (0,\,1).\) Compute
and set
Then the sequences \(\{u_n\}.\{w_n\}\) and \(\{v_n\}\) strongly converge to the solution \({\mathfrak {z}}\) of \(VI({\mathcal {A}},{\mathcal {K}}).\)
5 Numerical illustrations
In this section, we provide a numerical example to support and justify our proposed algorithm. All codes are written in Matlab (2021a).
Example 5.1
Suppose that \({\mathcal {H}} = {\mathbb {R}}\) with the inner product \(\langle u,v\rangle := u\cdot v,\quad \forall \,u,v\in {\mathcal {H}}.\) and the induced norm \(\Vert u\Vert := |u|, \quad \forall \,u\in {\mathcal {H}}.\) Let \({\mathcal {K}} := \{u\in {\mathcal {H}}:|u|\le 1\}\) be the unit ball and defined an operator \({\mathcal {A}}:{\mathcal {K}}\rightarrow {\mathcal {H}}\) by
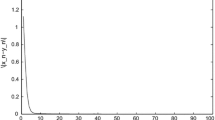
Clearly, \({\mathcal {A}}\) is \(1-\)Lipschitz continuous and pseudomonotone operator on \({\mathcal {K}}.\) We consider a contraction mapping \(g(u) = u/2\) for all \(u\in {\mathcal {H}}\) with \(\xi =1/2.\) The solution set of variational inequality problem (VI) is given by \(VI({\mathcal {A}},{\mathcal {K}}) = \{0\}\ne \text{\O }.\) Moreover, with respect to corollary 4.2, we take \(\psi _n = \dfrac{1}{1+n},\,\eta = 0.33,\,u_0 = 0.3.\)
Numerical results of the sequence \(\{u_n\}\) generated by Corollary 4.2 for initial value \(u_0=0.3\) and different choices of step size \(\tau _0.\)
Numerical results for initial value \(u_0=0.3.\) | |||
|---|---|---|---|
Number of iterations | \(\tau _0 = 0.1\) | \(\tau _0 = 0.2\) | \(\tau _0 = 0.5\) |
1 | 0.300000 | 0.300000 | 0.300000 |
15 | 0.026389 | 0.009698 | 0.002684 |
30 | 0.004712 | 0.000538 | 0.000033 |
45 | 0.000955 | 0.000033 | 0.000000 |
69 | 0.000082 | 0.000000 | 0.000000 |
75 | 0.000045 | 0.000000 | 0.000000 |
90 | 0.000010 | 0.000000 | 0.000000 |
121 | 0.000000 | 0.000000 | 0.000000 |
Remark 5.1
In view of the above graphical representation (Fig. 1) of the sequence \(\{u_n\}\) , we see that the proposed algorithm work better when the value of the step size \(\tau _0\) is larger.

Graphical representation of the sequence \(\{u_n\}\) for initial value \(u_0 = 0.3\) and different choices of step size \(\tau _0.\)
Data availibility
Data sharing is not applicable to this article as no datasets were generated or analyzed during the current study.
References
Bauschke, H.H., Combettes, P.L., et al. 2011. Convex analysis and monotone operator theory in Hilbert spaces vol. 408. New York: Springer.
Blum, E. 1994. From optimization and variational inequalities to equilibrium problems. The Mathematics Student 63: 123–145.
Burachik, R.S., C.Y. Kaya, and M. Mammadov. 2010. An inexact modified subgradient algorithm for nonconvex optimization. Computational Optimization and Applications 45 (1): 1–24.
Ceng, Lu-Chuan, Jen-Chih, Yao, Yekini, Shehu. 2022. On Mann implicit composite subgradient extragradient methods for general systems of variational inequalities with hierarchical variational inequality constraints. Journal of Inequalities and Applications 1: 1-28.
Ceng, Lu-Chuan, Meijuan, Shang. 2021. Hybrid inertial subgradient extragradient methods for variational inequalities and fixed point problems involving asymptotically nonexpansive mappings. Optimization 4: 715-740.
Ceng, Lu-Chuan, Qing, Yuan. 2019. Composite inertial subgradient extragradient methods for variational inequalities and fixed point problems. Journal of Inequalities and Applications 1: 1–20.
Ceng, L.C., et al. 2020. A modified inertial subgradient extragradient method for solving pseudomonotone variational inequalities and common fixed point problems. Fixed Point Theory 21 (1): 93–108.
Ceng, L.C., et al. 2021. Pseudomonotone variational inequalities and fixed points. Fixed Point Theory 22 (2): 543–558.
Ceng, L.C., et al. 2021. Two inertial subgradient extragradient algorithms for variational inequalities with fixed-point constraints. Optimization 70 (5–6): 1337–1358.
Ceng, Lu-Chuan. 2021. Modified inertial subgradient extragradient algorithms for pseudomonotone equilibrium problems with the constraint of nonexpansive mappings. Journal of Nonlinear and Variational Analysis 5: 281–297.
Ceng, L.C., and C.S. Fong. 2021. On strong convergence theorems for a viscosity-type extragradient method. Filomat 35 (3): 1033–1043.
Chen, J., Y.-C. Liou, Z. Wan, and J.-C. Yao. 2015. A proximal point method for a class of monotone equilibrium problems with linear constraints. Operational Research 15 (2): 275–288.
Cho, S.Y. 2020. A monotone Bregman projection algorithm for fixed point and equilibrium problems in a reflexive Banach space. Filomat 34 (5): 1487–1497.
Fan, J., Liu, L., Qin, X. 2019. A subgradient extragradient algorithm with inertial effects for solving strongly pseudomonotone variational inequalities. Optimization.
Fan, K. 1972. A minimax inequality and applications. Inequalities 3: 103–113.
Giandomenico, M. 2003. On auxiliary principle for equilibrium problems. In Equilibrium Problems and Variational Models, pp. 289-298. New York: Springer.
Gibali, A., et al. 2019. Gradient projection-type algorithms for solving equilibrium problems and its applications. Computational and Applied Mathematics 38 (3): 1–18.
Goebel, K., Simeon, R. 1984. Uniform convexity, hyperbolic geometry, and nonexpansive mappings. New York: Marcel Dekker.
He, Long. et al. 2021. Strong convergence for monotone bilevel equilibria with constraints of variational inequalities and fixed points using subgradient extragradient implicit rule. Journal of Inequalities and Applications 1: 1-37.
Husain, S., and M. Asad. 2022. Solving equilibrium problem and fixed point problem by normal s-iteration process in Hilbert space. European Journal of Mathematical Analysis 2: 1–10.
Jadamba, B., A.A. Khan, and F. Raciti. 2014. Regularization of stochastic variational inequalities and a comparison of an Lp and a sample-path approach. Nonlinear Analysis: Theory, Methods & Applications 94: 65–83.
Kreyszig, E. 1978. Introductory functional analysis with applications. New York: John Wiley & Sons. Inc.
Mainge, P.-E. 2008. A hybrid extragradient-viscosity method for monotone operators and fixed point problems. SIAM Journal on Control and Optimization 47 (3): 1499–1515.
Mastroeni, G. 2003. Gap functions for equilibrium problems. Journal of Global Optimization 27 (4): 411–426.
Moudafi, A. 2000. Viscosity approximation methods for fixed-points problems. Journal of mathematical analysis and applications 241 (1): 46–55.
Muu, L., and W. Oettli. 1992. Convergence of an adaptive penalty scheme for finding constrained equilibria. Nonlinear Analysis 18 (12): 1159–1166.
Reich, S. 1979. Constructive techniques for accretive and monotone operators. In Applied Nonlinear Analysis, pp. 335-345. Amsterdam: Elsevier.
Tan, B., J. Fan, and S. Li. 2021. Self-adaptive inertial extragradient algorithms for solving variational inequality problems. Computational and Applied Mathematics 40 (1): 1–19.
Tan, B., S. Xu, and S. Li. 2020. Inertial shrinking projection algorithms for solving hierarchical variational inequality problems. Journal of Nonlinear and Convex Analysis 21: 871–884.
Van Hieu, D., P.K. Quy, and L. Van Vy. 2019. Explicit iterative algorithms for solving equilibrium problems. Calcolo 56 (2): 1–21.
Xu, H.-K. 2002. Iterative algorithms for nonlinear operators. Journal of the London Mathematical Society 66 (1): 240–256.
Zhao, Tu-Yan, et al. 2020. Quasi-inertial Tseng’s extragradient algorithms for pseudomonotone variational inequalities and fixed point problems of quasi-nonexpansive operators. Numerical Functional Analysis and Optimization 1: 69-90.
Author information
Authors and Affiliations
Contributions
All authors contributed equally to this manuscript.
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest
Ethical approval
This article does not contain any studies with human participants or animals performed by any of the authors
Additional information
Communicated by S Ponnusamy.
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Husain, S., Asad, M. Viscosity-type extragradient algorithm for finding common solution of pseudomonotone equilibrium problem and fixed point problem in Hilbert space. J Anal 31, 1355–1373 (2023). https://doi.org/10.1007/s41478-022-00517-8
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s41478-022-00517-8
Keywords
- Equilibrium problem
- \(\psi -\)Strongly extragradient method
- Viscosity approximation method
- Pseudomonotone bi-functions
- Lipschitz-type condition