
Abstract
Flywheel-based energy storage systems are gaining prominence in present-day energy-deficit situation. For energy storage system, the bearings and motor cum generator, for charging and discharging energy to and from the flywheel, form the vital components which have to be given due consideration. The low coefficient of friction of high-temperature superconductor bearings used in flywheel-based energy storage systems decides the energy loss factor. Yttrium Barium copper oxide (YBCO) which is one of the popular high-temperature superconductors is widely being used in high-temperature superconductor bearings. The planar type of bearings can be materialised by building the stator of the bearing with YBCO bulk high-temperature superconductor discs mounted in a circular array and rotor part can be realised by Nd–Fe–B permanent magnet ring which is to be embedded with the flywheel. The levitation force is proportional to the mean magnetization of high-temperature superconductor and the horizontal gradient of the vertical component of the magnetic field density in the superconductor. The magnetization is proportional to the product of critical current density and the grain diameter of the bulk superconductor. The high-temperature superconductor bearings outweigh the magnetic bearings because their passive nature, by virtue, does not require any external active stability balancing devices. The paper discusses of development, fabrication and load testing of prototype planar type of high-temperature superconductor bearings. For charging and discharging energy to and from the flywheel energy storage system, Halbach array-type motor cum generator is a promising candidate. The motor, with an outside rotor design, is a dipole Halbach array, establishing a uniform flux within the stator area. A uniform flux is needed for operating the motor on a superconductor bearing, where slight movement of the stator inside the air gap is inevitable. The salient construction features of the prototype Halbach array motor generator will be discussed.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
Flywheel-based energy storage systems (FESS) are finding important applications with the advent of commercially viable yttrium barium copper oxide (YBCO) bulk superconductors which can be used for building high-temperature superconducting bearings. High-temperature superconducting bearings are simple in construction and passive in nature and have features like better bearing stiffness, low coefficient of friction and ability to absorb the small perturbations arising from the rotor. For charging and discharging the flywheel energy storage system (FESS), Halbach array-type motor cum generator, where Halbach array made of rare earth permanent magnets can be embedded into the flywheel is a better proposition, considering its tolerance to air gap variation between the stator and rotor. The applications of FESS cover wide range of versatile applications like in (a) feeding energy to the satellites, while traversing through the darker zone of orbit (Wagner et al. 2002) (b) quietly powering stealth electromagnetic aircraft launch operation due to their inherently low noisy operation and ability to deliver huge surge of power throughput in short periods of operation (Swett and Blanche 2005) (c) supporting the base load energy utility system during peak hours of the day time when energy demand peaks (Hull 1999).
YBCO is a type 2 superconductor having transition temperature around 90 K. Liquid nitrogen with boiling point at 77 K is a viable cryogen for cooling YBCO superconductor. YBCO shows perfect diamagnetic behaviour (complete exclusion of magnetic flux), known as meissner phase, till the magnetic flux density is increased from zero to 0.05 T. Further increase in the magnetic field allows the magnetic flux lines to creep into the superconductor and the magnetic flux lines exists in the superconductor, in the form of quantum flux tubes ϕ0, which is given by the relation as shown in Eq. (1):
where ‘h’ is denoted as Planck’s constant and ‘e’ as electron charge. The flux tubes are held stuck to the pinning sites in the bulk superconductor material. This phase is called the mixed phase where superconducting phase exists in bulk material and normal phase exists in pinning sites where flux tubes are restrained by vortex currents flowing in the superconducting phase region.
The superconducting bearings are generally made in planar- or journal-type configuration. In planar-type bearing, YBCO disks are placed in a circular array on a plane and above which a rare earth type permanent magnet like Nd–Fe–B ring is placed.
Factors to be Considered for Flywheel Energy Storage System
Figure 1 depicts a flywheel configuration. The ‘I’ defines the moment of inertia of flywheel having a radius ‘R’ and rotating at angular speed ‘ω’. The bearing shaft is having a radius ‘RD’.

Schematic of flywheel
Energy stored in a flywheel ‘EKIN’ can be defined as
The drag force ‘FD’ acting on the bearings causes a torque ‘\(\tau^{\prime}\) that can be represented by the expression
The coefficient of friction ‘μ’ of the bearing can be defined as the drag force acting on the flywheel upon the weight of flywheel body supported by bearing and this can be represented in
where ‘g’ is the gravitational acceleration. (Abrahamsen 2001)
The expression for energy loss factor ‘ELF’ for the flywheel can be simplified and deduced from the above Eqs. (2)–(4) and represented as
It is noted that factor ‘μ’ significantly decides the energy loss factor ‘ELF’.
Passive Levitation of the Superconductor Bearing
The superconductor bearing during levitation requires no active stabilising mechanisms for balancing the forces on all the three rectilinear axes. In contrast, the magnetic bearings require to be stabilised at least in one of the axes using active feedback mechanism as per the Earnshaw’s theorem. The Earnshaw’s theorem states that it is not possible to have any sort of levitation arrangement comprising of fixed configuration of any number of permanent magnets, which are held in static condition, to achieve stable levitation by any combination of gravitational and magnetic forces. A schematic of two permanent magnets is shown in Fig. 2.

Unstable levitation by two permanent magnets
The following equations can be deduced from Maxwell’s equations by applying conditions like no external currents and no mono-magnetic pole can exit in isolation, which prevails for permanent magnet,
where ‘B’ denotes magnetic density which implies
The energy experienced by the upper magnet can be denoted as ‘PE’. PE can be expressed as summation of gravity term and dipole interaction term. The upper magnet having mass ‘m’ which is levitated at a distance ‘z’ along the vertical axes from reference, in the presence of magnetic field density ‘B’, is given by the expression
where ‘µm’ is dipole magnetic moment of the magnet.
Further to achieve stable equilibrium condition for the levitation, it is required to have minimum energy condition for the system. This is possible by having positive second derivative of the energy in all the three co-ordinate axes. This enforces the conditions on the second derivative of the magnetic field density, which are represented by equations from (9) to (11). But these conditions contradict Eq. (7) which imposes that at least one of the three second derivatives of magnetic flux density should be negative to satisfy equation. Thus, in magnetic bearings, it is required at least to provide active correction mechanism in one of the axes, to achieve stable levitation.
Different Cooling Configurations of Superconductor Bearing
The high-temperature superconducting bearing can be either zero cooled-type or field cooled-type configuration. In zero cooled-type configuration, the permanent magnet is brought near the vicinity of the superconductor after it is cooled beyond its transition temperature (93 K). In this type of levitation, repulsive force between permanent magnet and image of permanent magnet formed in the superconductor is more dominant, where expulsion of flux happens due to flow of persistent currents in the rim of the superconductor. Figure 3 shows zero cooled-type configuration. In field cooled-type superconductor bearing, the permanent magnet is also cooled along with the superconductor. The magnetic flux lines in the form of flux tubes get trapped in the pinning sites present in the superconductor, once the transition temperature is reached.

Zero cooled-type levitation
Bean’s Critical State Model for Estimating Levitation Force
The levitation force ‘F’ in the axial direction of the planar-type superconductor bearing depends on magnetisation ‘M’ of the superconductor in the presence of the external applied magnetic field density ‘Ba’. Levitation force also depends upon the horizontal gradient of the vertical component of the ‘Ba’. In generalised form, the levitation force can be represented in the following form (Chen et al. 1990).
By applying Bean’s critical state model, one can estimate the magnetisation which gets saturated beyond a threshold magnetic field density Ba The threshold magnetic field density B *a is given by the relation
where ‘Jc’ is denoted for critical current density of current which is flowing in the circumferential direction of the superconductor disc, ‘R’ is the radius of the superconductor and ‘µ0’ is the magnetic permeability in air. The flux tubes which have penetrated and trapped in the pinning centres of the superconductor have a maximum gradient which is governed by the critical current density ‘Jc’.
The critical state model defines the saturated value for ‘M’ magnetisation of the superconductor by the expression
The critical state model assumes that constant density of critical current flows in the region up to where the flux tubes have penetrated. At saturation, the flow of current density ‘Jc’ reaches the centre of the disc. Figure 4 depicts the flow characteristics of the persistent current with penetration of flux tubes into superconductor.

Bean’s critical model depicting the region of the superconductor where persistent current flow in accordance to the flux tubes penetrated into the superconductor
Flywheel-Based Energy Storage System
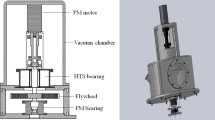
The schematic of the proposed flywheel energy storage system (FESS) for energy storage capacity of 100 Wh is shown in Fig. 5. The flywheel made of maraging steel is supported by two superconductor bearings at top and bottom. The design mass for the flywheel is 32 kg. A levitation force boosting provision, to supplement the high-temperature superconductor bearings, is given by permanent magnet over permanent magnet arrangement which is mounted on the central support of stator of Halbach array motor cum generator.

Schematic of proposed flywheel energy storage system
The high-temperature superconductor (HTS) bearings are provided on top and bottom parts of the flywheel. The HTS bearing configuration is of planar type. Planar type of bearings have the advantage of simplicity in geometry compared to journal type of bearing. Planar type of bearings generally supplement to the levitation generated, by permanent magnet over permanent magnet, in the booster levitation arrangement and as well as provide passive stability to the levitation system. The levitation disks of the HTS bearings are housed in G-10 cryostat. The cooling circuit is provided by connecting the cryostat to two nitrogen dewars. The ring-shaped magnets which form the rotor part of the HTS bearings are embedded on the top and bottom faces of the flywheel. The Halbach array rotor is embedded in the inner diameter surface of the flywheel. The stator of the Halbach array is supported from the top side. The stator consists of three phases wound on the grooves provided on the nylon former. To reduce the losses due to air friction, the housing of the flywheel is connected to a vacuum pump. For qualifying the critical components of FESS, it was decided to fabricate and test the prototype of HTS bearings and Halbach array motor cum generator.
Results and Discussion on Levitation Versus Load Experiment with HTS Bearing
The experimental set-up was made for testing the HTS bearing configuration. The YBCO levitation discs of 21-mm diameter were arranged in a circular array of 75-mm PCD. During experiment, the levitation discs were placed freely in the slots provided on the body of the bearing. However, care has to be taken to fasten the discs by screws from side of the body, when bearing is to be mounted in the FESS. The array was placed in a glass wool-covered vessel and is shown in Fig. 6. The levitation discs were cooled by liquid nitrogen. The technical specification of the YBCO discs is given in Table 1. A Nd–Fe–B type rare earth permanent magnet ring having a PCD of 75 mm, width 7.5 mm and thickness 12 mm was fabricated. The permanent magnet ring was embedded in a nylon jacket as shown in Fig. 7 and placed over the cooled HTS discs. The levitation heights for various loads were tabulated ( Figs. 8, 9). It was observed that stability of the magnet ring during rotation depended upon the positioning the HTS discs accurately on the same plane.

High-temperature superconductor array

Nd–Fe–B permanent magnet

Levitation of permanent magnet over cryo-cooled HTS array

Levitation versus load graph of HTS bearing
Constructional Details of Halbach Array Motor Generator
The flywheel energy storage system is to be charged and discharged by means of Halbach array motor cum generator (Mulcahy et al. 1999). A prototype Halbach motor cum generator was fabricated and tested. The motor cum generator has a salient feature of having outside rotor design which is in the form of dipole Halbach array, to produce a uniform flux within the stator area.
A uniform magnetic flux density is desired in the central core region where stator is placed, for operating the motor where slight variation of the air gap between rotor and stator is inevitable. The expression of magnetic field density in Halbach array motor rotor is given as
where ‘Bhb’ is the uniform magnetic density in the central region of the Halbach array motor, ‘Brem’ is the remnant flux density of the magnet, ‘r2’ is the outer diameter of the Halbach array motor, ‘r1’ is the inner diameter of the Halbach array motor and ‘κ’ is a constant defined by following relation
where ‘M’ is the number of poles of the magnets in the Halbach array combination. The electromagnetic simulation for mapping the magnetic field density inside the Halbach array arrangement was carried out using COMSOL software. The direction and surface plot of magnetic flux density is shown in Fig. 10.

Results of electromagnetic simulation showing the direction and surface plot of magnetic flux density in Tesla units
The motor is to be driven by pulse width-modulated servo drive which is typically used for brush less motors. The picture of Halbach array motor cum generator with drive is shown in Fig. 11. The Halbach rotor consists of rectangular rare earth magnets (Neodymium–Iron–Boron Nd–Fe–B) which are assembled to form a circular Halbach array configuration. To achieve this, a novel procedure was adopted whereby a cylindrical sleeve was machined in steel and square lattices were milled in the sleeve along the axial direction. Each square lattice had a relative angular offset by 45° with respect to the adjacent lattice. Nd–Fe–B magnets were assembled into the lattice locations to attain a uniform dipole magnetic field in the central core region. The lattice locations along with magnet polarity are shown in Fig. 12. The isometric view of the cylindrical sleeve along with lattice slots is shown in Fig. 13. The motor is to be driven by pulsed width-modulated servo drive which is configured for closed loop control with rotor position feedback obtained with help of hall sensor and miniature magnets embedded on the rotor, to mark rotation for every 60° angular rotation. The working scheme of pulse width-modulated servo drive is shown in Fig. 14. The switching sequence of the bridge power switches with respect to the rotor angle position IS shown in Table 2. The picture of mounting of hall sensor and rotor position magnets is shown in Fig. 15. The stator is cylindrical in shape and should be fabricated out of nylon having provision for winding three phases of winding wire. The winding wires are spatially spaced 120° apart. The design torque developed by the rotor is around 0.06 Nm. The pitch of the winding was 180° apart. Each phase is distributed among two pairs of slots. So, totally there will be 12 slots for three phases.

Halbach array motor cum generator along with PWM servo drive

Lattice locations in cylindrical sleeve with magnet polarity directions

Isometric view of cylindrical sleeve with lattice locations

Full Bridge scheme of PWM drive

Hall sensor and magnet arrangement for Halbach array setup
Conclusion
The HTS bearings and Halbach array motor cum generator are the vital components for the efficient flywheel-based energy storage system. HTS bearings comprising of YBCO superconductors and rare earth Nd–Fe–B permanent magnets offer a compact and high strength bearings which are passive in nature and do not need any external stabilising mechanisms. In contrast, the magnetic bearings require active stabilising mechanism, at least in one of the axes as per Earnshaw’s theorem.
HTS bearings are maintenance free as they have no rubbing components. They have low coefficient of friction around three orders lower than that of the mechanical bearings, which are generally around 10−3. With the use of HTS bearings in Flywheel-based Energy storage systems, it would be possible to restrain energy loss in energy storage to the order less than 1% for 12 h of storage. The levitation force of the HTS bearings can be estimated by applying Bean’s critical state model. The levitation force is proportional to the critical current density and single grain size of bulk high-temperature superconductor. With higher mass production of YBCO discs, prices can further drop and give cheaper bulk energy storage systems which will not have theoretically any limit with respect to the number of energy charging and discharging cycles.
The Halbach array motor cum generator has the salient feature of providing a uniform dipole magnetic flux density in the central core of the rotor where stator is placed, thereby providing less rotational vibrations in the motor. The permanent magnets kept in Halbach array configuration can be embedded in the inner diameter of the flywheel to make a rotor outside design. A cylindrical sleeve with square lattice locations milled into it can accommodate square permanent magnets in such a way that a uniform dipole field can be created. The Halbach array motor can be driven by a PWM servo drive in closed loop mode by taking feedback for every 60° of rotation with help of a miniature magnet and hall sensor combination.
The flywheel energy storage system based on high-temperature superconductor bearings and Halbach array type motor cum generator provides viable solution for inexpensive bulk energy storage to modern-day smart grid systems. The diurnal energy storage system network can bank on under-utilised energy in the grid during dip in energy demand and provide robustness to the grid.
References
Abrahamsen AB (2001) Superconducting bearings for flywheel applications. ISSN 0106-2840, Report No. RisФ-R-1265-EN, RisФ National Laboratory, Denmark
Chen DX, Sanchez A, Nogues J, Munoz JS (1990) Bean’s, Kim’s, and exponential critical state models for high-Tc superconductors. Phys Rev B 41(13):9510–9512
Hull JR (1999) Using of high-temperature superconductors for levitation applications. JOM 51(7):13–18
Mulcahy TM, Hull JR, Uherka KL, Niemann RC (1999) Flywheel energy storage advances using HTS bearings. IEEE Trans Appl Supercond 9(2):297–300
Swett DW, Blanche IV JG (2005) Flywheel charging module for energy storage used in electromagnetic aircraft launch system. IEEE Trans Magn 41(1):525–528
Wagner RC, Boyle DR, Decker K (2002) Commercialization of flywheel energy storage technology on the international space station. In: 37th lnter society energy conversion engineering conference (IECEC) Paper No. 20015
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Shyam, T.V., Madhusoodanan, K. Technical Aspects of Critical Components for High-Temperature Superconductor Bearings-Based Flywheel Energy Storage System. INAE Lett 4, 37–44 (2019). https://doi.org/10.1007/s41403-019-00064-y
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s41403-019-00064-y