
Abstract
Traffic conflict techniques (TCTs) are one of the most frequently used proactive surrogate safety measures which can be used to estimate traffic safety even before the occurrence of a crash. This study explores the variation in rear-end conflict with respect to signal timing and distance from stop lines at signalized intersections with non-lane-based behavior under mixed traffic conditions. More than 4500 vehicle trajectories were extracted for every 0.2-s interval using a semi-automatic tool from field-recorded video footage from two signalized intersections in India. Two popular surrogate safety measures, time to collision (TTC) and deceleration rate to avoid crash (DRAC), were used to identify critical interaction between different vehicle types at varying threshold values. The temporal variation of traffic conflict showed that the majority of conflicts are happening in the first half of red and green time, whereas more severe conflicts occurred at the beginning of red time. Two-wheelers and three-wheelers showed the highest lateral movement and aggressiveness, resulting in critical vehicle interactions closer to the stop line. Variation in conflict proportion based on lane type showed that smaller vehicles prefer curb-side lanes over median-side lanes. Temporal and spatial distribution of conflict based on vehicle type and conflict severity distribution gives a better understanding of how the signal timing influences traffic safety in non-lane-based mixed traffic conditions. These results can be used most beneficially for enhancing the safety and performance of signalized intersections in developing countries.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
Background
Signalized intersections are important points in the road network which help to eliminate the critical conflict points at the junction. Even though signalized intersections are considered efficient in controlling traffic, they have the second-highest number of accidents after un-signalized intersections according to the Road Accidents in India-2018 report by the Ministry of Road Transport and Highways of India (MoRTH) [1]. Road accidents result from various factors that can be broadly categorized into human errors and roadway/traffic factors. The most common accident types at signalized intersections are rear-end and angled collisions. Major causes of accidents are driver’s inattentive driving and inadequate distance between the follower and the leader vehicle [2]. For many years, safety analysis for signalized intersections has often been undertaken with historic accident data which is a reactive approach. Furthermore, in developing economies like India 70% of non-fatal and 22% of fatal road traffic injuries go unreported resulting in several limitations related to the use of accident data for safety [3]. In order to use historical collision data for safety analysis, collisions need to occur and must be recorded over a long period (usually years) to be used for a statistically sound safety analysis [4, 5]. Because of these issues, several proactive surrogate safety measures have been introduced to evaluate the safety.
Traffic conflict techniques (TCTs) are one of the most frequently used proactive surrogate safety measures. Traffic conflict is “an observable situation in which two or more road users approach each other in space and time to such an extent that there is a risk of collision if their movements remain unchanged’’ [6]. The most interesting aspect of TCTs is their ability to analyze safety issues within a shorter period compared to the use of accident data. Hence, any safety program can also be implemented more effectively in a timelier manner. Traffic conflicts can be observed and occur more frequently than collisions. These Surrogate measures of safety help in identifying observable critical vehicle interactions that could have led to a crash. Thus, by reducing traffic conflicts the number of road collisions can also be reduced. Furthermore, these identified non-crash events can be converted into the corresponding crash frequency or crash severity, thus enabling safety evaluation without depending on a huge amount of crash data [7]. The area of traffic conflicts has been studied by many researchers, and the TCTs can be broadly divided into temporal, spatial, deceleration-based indicators, etc. Surrogate safety indicators such as time to collision (TTC) [8], time to accident [6], time exposed time-to-collision (TET)indicator, time integrated time-to-collision (TIT) indicator, modified TTC (MTTC) [9], time headway, deceleration rate to avoid crash (DRAC) have been frequently used in surrogate safety analysis, especially in lane-based traffic conditions. TTC and DRAC concept has been best suited for situations where there is a higher chance of rear-end collisions [5]. The lower the TTC values, higher the chances of collision. The minimum TTC value that can separate between safe and unsafe vehicle interaction is termed the threshold value and is used for estimating conflict severity. Existing studies have adopted TTC thresholds varying from 1 to 5 s. The higher the DRAC value, more severe the conflict. Several studies have considered DRAC threshold varying from 6 m/s2 (more severe) to 0 m/s2 [5, 7, 10]. This large variation in threshold value is due to the variation in road type, vehicle type, and driver behavior. Sites closer to the signalized intersection junctions have a higher percentage of conflicts [10]. Traffic variables have a significant impact on rear-end conflicts at varying threshold levels at the signalized intersection [11, 12]. Hence, it is difficult to finalize a single threshold value universally [13]. In such circumstances, determining a threshold value suitable for respective traffic conditions becomes essential [14]. Safety evaluation of signalized intersections based on historical accident data, annual average traffic volume, geometric characteristics of the intersection, etc., is widely used in lane-based conditions. A large number of these existing studies have considered traffic conditions involving passenger cars alone. But those methods need not be very accurate while evaluating safety in non-lane-based traffic conditions where vehicles occupy any position across the width of the road. In mixed traffic conditions which consist of different vehicle types with non-lane-based movement, drivers often travel in a haphazard manner resulting in more crash rates [15, 16]. For effective safety assessment using TCTs in non-lane-based mixed traffic conditions, precise vehicle trajectory data are crucial in determining the conflicting leader–follower pair [15, 16]. The majority of signalized intersection studies in India are focused on the countdown timer, density, flow, vehicle speed, acceleration characteristics, the impact of two-wheeler proportion on safety, etc. However, most of these analyses and interpretations were based on crash data [17]. Furthermore, previous studies prove that important signal cycle-related variables such as signal timing, queue length, vehicle arrival type, dilemma zone influence signalized intersection safety significantly [11, 18, 19].
Research Motivation
India is a developing economy where the traffic constitutes of different vehicle types following non-lane-based movement. Most of the surrogate measures used for estimating rear-end conflict in homogeneous lane-based traffic condition are not applicable in heterogeneous traffic condition because it ignores the static and dynamic characteristics of different vehicle types. Since vehicles occupy any position on the road width, incorporating the width of different vehicle types while identifying the critical vehicle interaction helps in the better safety assessment of signalized intersections in non-lane-based traffic. The effect of lateral movement of different vehicle types on safety aspects is not well explored and quantified based on evidence. Precise vehicle trajectory is essential in identifying and estimating critical interactions between different leader–follower pairs. However, in the Indian traffic scenario where most leader–follower pairs are short-lived, the use of proper smoothening techniques plays a vital role. Trajectory data extracted from field video data, after applying accurate smoothening techniques to reduce errors, can be most effectively used for precise estimation of relative distance, speed, and acceleration between leader–follower pairs. A previous study in lane-based traffic conditions discusses the temporal aspects of rear-end conflict at signalized intersections [20]. However, very limited studies have attempted to study the temporal and spatial variation of rear-end conflict based on signal cycle time and traffic parameters such as queue length in mixed traffic conditions. Furthermore, spatial variation in rear-end conflict proportion based on lane type at signalized intersections in non-lane-based conditions has not been studied. The influence of different vehicle types on conflict severity in the safety assessment of signalized intersections has not been explored in detail.
Objectives
Considering these identified gaps, it becomes evident that identification of critical vehicle interaction and assessment of the temporal and spatial variation of rear-end conflict is crucial for surrogate safety assessment at a signalized intersection. Hence, this study aims to identify critical vehicle interactions and estimates conflicts using multiple surrogate safety measures at varying threshold values considering the precise lateral and longitudinal position of different vehicle types. The temporal and spatial variation of rear-end conflict at signalized intersections under non-lane-based traffic conditions is studied. The lateral movement of vehicles and variation in conflict proportion along lane width is investigated. Furthermore, the severity of the traffic conflict based on signal timing and vehicle type is also studied to give a better understanding of vehicle behavior in mixed traffic conditions. Overall, this study aims for proactive safety estimation by identifying critical interactions between vehicles with varying static and dynamic characteristics responsible for temporal and spatial variation of rear and conflicts at the signalized intersection.
Methodology
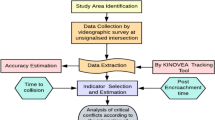
This section discusses the data collection, extraction, and methodology for the identification of vehicle interaction and estimation of critical conflict based on multiple surrogate safety measures at varying threshold values. The temporal and spatial variation of critical conflict-based vehicle types is also explored. In addition to the conflict frequency distribution, the severity distribution of the identified conflicts is also investigated. Figure 1 gives the flowchart for the methodology adopted in this study.

Gives the flowchart for the methodology
Study Location and Data Collection
Two signalized intersections from two different cities with varying traffic and geometric characteristics were selected for this study. The first location is a four-legged junction in Mumbai city (Tagore), with an eight-lane divided major approach road. The second location is a four-legged junction in Calicut city (Arayidathupalam), with a four-lane divided major approach road. The intersections are selected in such a way that there is an elevated vantage point with clear visibility of approach roads up to 150 m, visibility of traffic signal indication, and important intersection characteristics. The video camera was focused on intersection approaches where most of the rear-end conflicts occur. The trap length was fixed in such a way that the maximum queue length will be captured. Road markings and flag off were done along the edge of the road at every 9 m. With the help of these road markings, gridlines were superimposed on the video data using video editing software. Geometric measurements like the length and width of the approach were done using the measuring wheel and 30 m measuring tape. Based on the pilot study, it was concluded that data need to be collected during the non-peak hours (11 AM to 1 PM) during weekdays as the rear-end conflict required for this study is more prominent during the non-peak period. The major causes of rear-end conflict observed from the field at the signalized intersection approach were the lateral movement of different vehicle types, conflict happening due to dilemma behavior, and the stop and go movement of vehicles arising from signal change. The conflicts happening due to dilemma behavior were found to be observed during the non-peak hours as only then do the drivers have to choose to stop or proceed into the intersection area. Furthermore, during peak hours, the signal cycles are saturated and drivers have less maneuverability resulting in lesser lateral movement. Previous studies show that higher approach speed and sudden deceleration to join the queue can result in a higher risk of rear-end conflict [11, 20]. However, this trend is not visible during peak hours due to less approach speed, as the signal cycles are oversaturated. Therefore, over-saturated cycles, where a vehicle can stay in the same approach for more than one cycle, were neglected in this study.
Intersections with varying approach road widths were selected to study the variation in vehicle behavior based on road widths. The selected approaches were straight and flat, to avoid the effect of curves and grades. These intersections also have fewer numbers of cyclists, pedestrians, on-street parking, and bus stop near the signalized intersections area to minimize the effect of side friction. At both intersections, the traffic consists mostly of two-wheelers and cars. Arayidathupalam junction has a more two-wheeler proportion (44%) compared to Tagore (29%), whereas Tagore junction has more proportion of cars (41%) compared to Arayidathupalam junction (29%). The details of the intersection approach selected are given in Table 1.
Data Extraction
Several studies have demonstrated conflict data collection using field observers, video data, and simulation models to evaluate the safety of various road entities like intersections, road segments, etc. [4, 5, 9, 21]. In developing countries like India, where traffic constitutes of different vehicle types and weak lane discipline, an effective tool for vehicle trajectory extraction is necessary. Semi-automatic tool ‘IITB Traffic Data Extractor’ was used for trajectory extraction from video graphic data [22]. Figure 2 shows the screenshot of data extraction using the IITB traffic data extractor.

Screenshot of IITB traffic data extractor
Using video editing software, the video data were first overlaid with girds having width of 3.5 m (lane width) and 9 m length, developed based on the field flag-off points. This was done to accurately obtain the field reference points. After uploading the video into the IITB traffic data extractor, the calibration rectangle based on field reference points in the video is inputted. Knowing the trap length and width of the road, the reference points are entered. A trap length of 144 m was selected at Tagore junction and 88 m at Arayidathupalam junction. For example, the length and width of the calibration rectangle for the Tagore junction are 144 m (trap length) and 14 m (road width), respectively. The next step is inputting the accuracy in seconds with which the trajectory needs to be extracted. In this study, the trajectory data were extracted for every 0.2 s in both locations for 1 h. To get a vehicle’s trajectory, the user should start clicking on the front center point of the vehicle until the vehicle disappears from the video frame. After each click, the video automatically advances to the next frame. The vehicle types considered include two-wheeler (Tw), three-wheeler (Thw), car, light commercial vehicle (LCV), heavy commercial vehicle (HCV), and bus. Indian Highway Capacity Manual (Indo-HCM) was taken as the reference for this classification [23]. The user has to manually select the type of vehicle that is required to be tracked. After tracking the first vehicle along the length of the intersection approach, it has to be saved and the next vehicle can be tracked. To avoid confusion, the previously tracked vehicle is marked with a green dot by the software. The extraction was done for both turning and through moving vehicles in the intersection approaches. A total of 1556 vehicle trajectories (20 signal cycles) were extracted at the Arayidathupalam junction and 3100 vehicle trajectories (20 signal cycles) at the Tagore junction. Even though only two locations were considered, a huge amount of trajectory data (4656 vehicle trajectories) were considered in this study. Also, the signalized intersections selected in this study were from two different cities with varying traffic and geometric characteristics. This helps in capturing micro-level trajectories for assessing the variation in behavioral interaction of drivers based on traffic composition, queue length, road width, etc. However, the semi-automatic trajectory extraction is exhausting and time-consuming. For example, trajectory extraction of 1000 vehicles for a distance of 100 m takes at least 107 effective working hours. This indicates the need for an automatic tool for accurate data extraction in mixed traffic conditions.
The trajectory output file obtained from the IITB traffic data extractor contains the frame number, unique vehicle ID, time, vehicle type, and X and Y field coordinates of vehicles. Due to the frequent stopping action of vehicles at the signalized intersection, the trajectory data often have measurement errors. Fitting a higher-order polynomial to the trajectories of vehicles results in a function oscillating highly between successive observations, giving rise to unrealistic behavior. Hence, in mixed traffic conditions smoothing the vehicle position to estimate a continuous trajectory based on fitting a local curve at the points of interest is recommended. For each vehicle trajectory, the following two steps were carried out: first, estimation of a smooth time-continuous trajectory function from discrete vehicle position observations using weighted local regression. The locally weighted regression approach proposed and validated by Toledo et al. was used for data smoothing [15, 24]. The trajectory function around the point of interest is assumed to be a polynomial function of time and is estimated by using only observations in its neighborhood. A window size of 7 and polynomial order of 4 were used for smoothening the longitudinal and lateral positions. Compared with the raw data, in the longitudinal direction, the smoothed data have a mean average error (MAE) of 0.202 m and a root mean square error (RMSE) of 0.278 m. In the lateral dimension, the MAE and RMSE are 0.048 m and 0.071 m, respectively. The second step involves, estimating the instantaneous speed by taking the first derivative of the fitted trajectory function and instantaneous acceleration by taking the second derivative.
Surrogate Safety Measures Considered
The following surrogate safety measures are estimated based on the vehicle trajectory at each time step of the two vehicles involved in the conflict. Surrogate measures considered are TTC and DRAC. Even though these measures are mostly used in estimating rear-end conflict in lane-based traffic conditions, they are also best suitable in estimating rear-end and angled conflict [25]. These surrogate measures can be used for non-lane-based traffic conditions by incorporating the vehicle width of the interacting vehicles. This process is explained in detail in “Estimation of critical conflict”. TTC and DRAC have been best suited for situations where there is a higher chance of rear-end conflicts and merging interactions [5, 11]. This study is mostly focused on the rear-end conflicts happening at the signal approaches.
TTC is “the time that remains until a collision between the vehicles would occur if they continued on their present course at their present rates” [8]. TTC equation for rear-end conflict case where vehicle 1 is the leader and vehicle 2 is the follower is given below.
where, X1 and X2 are the longitudinal positions of leader and follower, respectively; V1 and V2 are the speeds of leader and follower, respectively; l1 is the length of the leader vehicle.
Out of all the TTC values at various points in time, the minimum TTC value that differentiates the safe and unsafe traffic operations is termed the threshold TTC and is used for estimating conflict severity. The TTC value of two interacting vehicles is estimated for each time step, and the minimum TTC value is compared with the threshold value. If the minimum TTC value is less than the threshold, then it is a critical rear-end conflict.
DRAC is the “rate at which a vehicle must decelerate to avoid collision with other conflicting vehicles” [5, 7].
where, X1 and X2 are the longitudinal positions of leader and follower, respectively; V1 and V2 are the speeds of leader and follower, respectively; l1 is the length of the leader vehicle.
From each leader–follower interaction, the maximum DRAC was compared to a threshold to separate the critical from non-critical interaction. If the maximum DRAC value is greater than the threshold, then it is a critical rear-end conflict.
Estimation of Critical Conflict
In weak lane-based traffic where vehicles maneuver based on the available longitudinal and lateral gap between vehicles, vehicles often have more than one leader vehicle. Precise vehicle position, speed, and acceleration are required to identify the critical interacting leader–follower pair. The methodology for estimating critical conflict consists of four broad steps. First, critical interactions between vehicles are identified from every instant of the interacting vehicle trajectories. Second, TTC and DRAC values are computed for all these vehicle interactions. Third, the estimated TTC and DRAC values are compared with the threshold values to estimate the critical conflict. Finally, the total number of critical conflicts per signal cycle is estimated. Detailed Matlab coding was developed for automatic extraction of critical conflicts for varying threshold values from the vehicle trajectory input. The user has to input the trajectory file containing the vehicle ID, vehicle type and vehicle position, and the required threshold values for estimating the critical conflict. The input trajectory file obtained from the IITB traffic data extractor contains the vehicle ID, time, vehicle type, and X and Y position coordinates. This file is inputted into the Matlab code which automatically estimates the vehicle speed and acceleration. The code compares the vehicle positions to find out the interacting vehicles at each instant of time. To identify the interacting vehicles, the central line position of the vehicle, the width of the vehicle, lateral overlap, and longitudinal gap of that vehicle with all the other vehicles present in that time step are considered. A virtual strip of width equal to the width of the subject vehicle is considered along the road segment. Filter out the leader vehicles (interacting vehicles) if their width overlaps with the virtual strip of the subject vehicle. Out of all the overlapping vehicles at that particular instant of time, the Matlab code estimates and records the details of the one leader which is closest to the subject vehicle under consideration. Estimate the TTC and DRAC values between the subject vehicle and that leader. This same method is continued for all the other vehicles in that particular time step. Once a time step is over, the next time step is considered and the same steps are repeated.
A subject vehicle can have two or more leader vehicles and follower vehicles if they are not following lane base traffic movement. Figure 3 shows an example for identifying interacting leader–follower pair. The longitudinal gap (Lx) is the clear gap between two vehicles in the direction of movement. It is measured between the front center point (denoted by a red dot in Fig. 3) of the subject vehicle and the rear end of the interacting vehicle (leader vehicle). Lateral overlap (Ly) is the extent to which the width of the subject vehicle overlaps with the width of the interacting vehicle [16]. The longitudinal gap (Lx) and lateral overlap (Ly) can be computed using the following expressions:
where, (Xs, Ys) is the front center coordinates of the subject vehicle; (Xi, Yi) is the front center coordinate of the interacting vehicle, i.e., the leader vehicle; WS and Wi are the width of the subject vehicle and interacting vehicle, respectively; Li is the length of the interacting vehicle, i.e., the leader vehicle.

Leader follower positions in non-lane-based traffic
Here, the subject vehicle has two leader vehicles (Leader 1 and Leader 2) since their width overlaps with the virtual strip of the subject vehicle (Ly < 0). The details for the leader (Leader1) closest to the subject vehicle are recorded, i.e., leader vehicle with the lowest Lx value. Hence, TTC and DRAC values are estimated between this pair (subject vehicle and Leader1). The output file generated by the Matlab code contains the time (sec), follower ID, follower vehicle position, follower vehicle type, follower speed, follower acceleration, leader ID, leader vehicle position, leader vehicle type, leader speed, leader acceleration, TTC value, DRAC value.
If the estimated TTC values of a given interaction are lesser than the threshold value, the conflict is noted down as critical. Fixed threshold values (0.5 s, 1 s, 1.5 s, 2 s, 3 s) were considered for estimating the TTC value, and four thresholds of 6 m/s2 (the most severe), 4.5 m/s2, 3 m/s2, and 1.5 m/s2 were considered for DRAC to address the severity levels [5]. The code gives the flexibility to input any required threshold value depending upon the user’s requirement. These thresholds are chosen based on previous literature where they adopted different TTC thresholds varying from 1 to 5 s and DRAC thresholds varying from 6 m/s2 to 0 m/s2 [5, 7, 10]. In this study, TTC threshold ≤ 3 s is considered because, from the field video data, it was observed that vehicle interactions with TTC values higher than 3 s were able to comfortably stop, avoiding a critical rear-end interaction. Analyzing the speed and distance gap of interacting vehicles from the field data ensured that the non-critical interactions and non-influencing leader vehicles get automatically removed. For TTC and DRAC, considering varying threshold values helps in understanding the variation in rear-end conflict severity. Different threshold values were considered in this study to identify the best suitable threshold value for mixed traffic conditions. To identify the optimal threshold, the correlation between conflicts estimated and real crashes has to be determined.
Results and Discussions
Conflict Frequency Distribution
The output from Matlab coding is analyzed to understand the temporal variation of critical conflict w.r.t the signal timing. In this study, multiple conflict indicators with varying threshold values were used to address the severity of the conflicts. Figure 4 and Fig. 5 give the temporal variation of conflicts with respect to the signal timing at varying TTC threshold values (0.5, 1, 1.5, 2, 2.5, and 3 s) for Tagore and Arayidathupalam junction, respectively. The colored bar along the X-axis direction denotes the red, green, and amber signal timings. The conflict events obtained from both locations were divided into 21 bins based on the recorded conflict time to the signal time. For uniform representation, the conflict occurrence time was expressed as a percentage of the signal timing. While clubbing all the conflict occurrences for all the signal cycles, the conflicts that happened during the red time should come under red signal time. For example, the red and the green signal timing were divided into 10 bins for both locations. The yellow time was represented as one separate bin. From both the figures, it can be noted that a greater number of conflicts happen in the first half of the red signal time and the first half of the green signal time. The conflicts happening in the first half of red signal time are due to the stopping action of vehicles to the red signal when the vehicles suddenly decelerate to join the queue. The conflicts happening in the first half of green signal time are mainly due to the queue release during the green time.

Conflict Frequencies (based on different TTC thresholds) versus traffic signal timing, Tagore junction

Conflict frequencies (based on different TTC thresholds) versus traffic signal timing, Arayidathupalam junction
From Fig. 4, it can be noted that for the Tagore junction more conflicts are happening at the first half of the green signal time followed by the first half of the red time, whereas in the Arayidathupalam junction (Fig. 5) more conflicts are happening at the first half of red time followed by the green time. There is a significant difference in the peak conflict trend at both locations. This can be attributed to the fact that Tagore junction with more approach width (14 m), more traffic volume, and longer queue length takes more time for queue dissipation. During the start of the green time, the stopped vehicles start to discharge, while other vehicles are arriving at higher speeds to the end of the queue resulting in a higher peak during the green time. Furthermore, the sudden sharp peak at the beginning of red time for the Arayidathupalam junction is because of the lesser approach width (7 m) leading to faster backward queue propagation resulting in an increase in backward moving shock wave speed. A similar trend can be noted in Fig. 6, which shows the temporal variation of conflicts with respect to the signal timing at varying DRAC threshold values (1.5, 3, 4.5, and 6 m/s2). DRAC gives the rate with which the interacting vehicle has to decelerate to avoid a collision from happening. The higher the DRAC, more critical is the conflict as the interacting vehicles have to suddenly decelerate to avoid a collision. In conclusion, Figs. 4, 5 and 6 give a better understanding of how signal timing can affect the conflict frequency.

Conflict frequencies (based on different DRAC thresholds) versus traffic signal timing
Similar observations were obtained for lane-based traffic conditions as well [11]. But unlike lane-based traffic, the proportion of conflicts happening during the green time is higher for non-lane-based traffic conditions. Furthermore, previous studies in lane-based traffic conditions show that optimizing signal timing has resulted in a reduction in traffic conflicts [26]. These results can be further used for estimating the optimal signal timing to reduce the number of conflicts, thus improving safety.
The effect of vehicle type on the variation of conflict frequency is very crucial in understanding safety in mixed traffic conditions. ‘Road accidents in India-2018’ report shows that two-wheelers contribute to more than 40% of accidents in India [1]. In this study, the conflict variation w.r.t to the follower vehicle is considered. From Fig. 7, it is clear that conflicts caused by cars (for both locations combined) are more when compared to other types of vehicles for all threshold conditions. This is because of the high proportion of cars in the traffic composition. At TTC threshold less than 0.5 s, the numbers of conflicts caused by three-wheelers are comparatively high when compared to conflicts caused by three-wheelers at other thresholds. This can be related to how three-wheeler drivers behave in mixed traffic conditions. Three-wheeler drivers often make risky maneuvers which include a sudden change in direction, sudden lane change, etc. Figure 8 shows the variation of conflict frequency based on vehicle type at different DRAC thresholds. The higher proportion of two-wheeler and three-wheeler at DRAC ≥ 6 m/s2 indicates that smaller vehicles resort to risky maneuvers resulting in a higher deceleration rate to avoid a crash. The higher the DRAC value, the more severe the conflict. From Fig. 8, a clear increase in the proportion of smaller vehicle types can be noticed at higher DRAC threshold values. However, Fig. 7 does not show an evident increase in the proportion of smaller vehicles for more critical TTC thresholds, except for the slight increase in the proportion of three-wheelers at TTC ≤ 0.5 s. This might be because TTC despite being a popular traffic conflict technique for estimating rear-end conflict fails to incorporate the deceleration rates of vehicles involved. However, DRAC on the other hand appears to be more realistic in incorporating the deceleration rate of vehicles. Previous studies show that better surrogate safety models were obtained for DRAC as the traffic conflict technique [20].

Variation of conflict frequency based on vehicle type at different TTC thresholds, all locations combined

Variation of conflict frequency based on vehicle type at different DRAC thresholds, all locations combined
Spatial Variation of DRAC
To gain further insight into these risky maneuvers of vehicles, the spatial variation of the DRAC value is analyzed. From the traffic video data collected from the field, it was observed that most of the two-wheelers and three-wheelers always try to percolate through the traffic along their desired but haphazard path to occupy the area closer to the stop line during the red time. Figure 9a and b show the average DRAC value for different vehicle types based on distance from the stop line. For better understanding, separate graphs were plotted to show the spatial variation of DRAC during red and green signal time. The red signal time includes the flow condition where the vehicles slow down to stop as the signal turns red, and as the red signal progresses more vehicles start joining the end of the queue. The green signal time (green time plus yellow time) includes the congested flow condition where vehicles discharge from the stop line on the onset of the green signal, and the queue release in the upstream section of the stop line followed by the unaffected flow condition were the vehicles arriving at the intersection do not face any congestion or delay. From Fig. 9a, during the red signal time, a high DRAC value can be observed near the stop line and closer to the maximum queue length. The high DRAC value observed closer to the stop line is due to the sudden deceleration of vehicles as they approach the stop line. A higher DRAC value can also be observed closer to the maximum queue length, indicating that the vehicles have to undergo sudden deceleration as they join the queue. The average maximum queue length (indicated by a red dashed line in Fig. 9a) is 80 m at Arayidathupalam and 118 m at Tagore. The highest DRAC value in both locations during red time is observed near the maximum queue length, indicating that the deceleration zone is dependent on the maximum queue length. Two-wheelers and three-wheelers show higher DRAC values, especially closer to the stop line emphasizing the fact that smaller vehicles instead of waiting at the end of the queue often move through the available space in the traffic to stop at a distance closer to the stop line. They are observed to be more aggressively decelerating as they approach the stop line. Furthermore, nonzero DRAC value at the stop line is because some vehicles, especially smaller vehicles, neglect safety and stop beyond the stop line, which is a common cause of concern at signalized intersections in India. Figure 9b shows the spatial variation of DRAC value during the green time. As the signal turns green, the vehicles start to discharge at different rates resulting in some of the vehicles suddenly decelerating to avoid a collision. The deceleration is higher at a distance closer to the stop line, especially for smaller vehicles such as three-wheelers and two-wheelers. Comparing the figures and analyzing the difference in trend gives a better understanding of how average maximum queue length affects the deceleration characteristics of vehicles.

a Spatial variation of DRAC during red signal time. b Spatial variation of DRAC during green signal time
Lateral Movement and Conflict Proportion
Each vehicle’s lateral movement between every time frame is estimated from the trajectory data and cumulated to determine the respective vehicle’s lateral movement while traversing through the intersection approach. Two-wheeler shows the highest lateral movement followed by three-wheeler and car in both red signal time and green signal time (Fig. 10). In non-lane-based traffic conditions like India, two-wheelers often percolate laterally in the available gap between other vehicles. More lateral movement is observed in red signal time. When the signal turns red, vehicles that are nearing the stop line move laterally to occupy a suitable position closer to the stop line, whereas the vehicles arriving at the approach move laterally to join the lane with a lesser queue length. During green signal, the lateral movement is less because vehicles often are observed to move laterally only when they want to overtake a slow-moving vehicle in front or when they have to do a lane change for turning traffic. Furthermore, lateral movement in the Tagore location is higher because the wider approach road width provides vehicles enough space to traverse laterally without much difficulty.

Lateral movement of different vehicle types for red and green signal time
To get further insight into the vehicle driving behavior, the proportion of conflicts caused by different vehicle types in different lanes during red and green signal time is studied. Figure 11 shows the variation in conflict proportion based on lane type at the Tagore location as an example. It can be observed that bigger physical size vehicles contribute more toward conflict in lanes closer to the median (median-side), whereas the vehicles with smaller physical sizes like two-wheelers and three-wheelers cause more conflicts in lanes closer to the curb (curb-side). This is because smaller vehicles prefer to occupy the lanes closer to the curb, and this trend is visible in traffic videos. Cars usually prefer to travel in the Intermediate and median-side lanes. Separate graphs were plotted to show the proportion difference during the red signal time and green signal time. During the red signal, Two-wheeler contributes to more conflicts in the curb lane compared to green time. This might be because, as the signal turns green, Tw seeps through the lateral gaps available and move to the front of the intermediate lane which helps in faster traversing.

Variation in conflict proportion based on lane type at Tagore junction
The lateral movement and lane preference of vehicle types help in implementing better safety traffic control measures such as two-wheelers exclusive lane, exclusive two-wheelers waiting area near the stop line. Existing studies show that providing an exclusive waiting area for two-wheelers near the stop line is very effective in improving signalized intersection safety and efficiency [27].
Conflict Severity Distribution
Conflict frequency given in Figs. 4, 5 and 6 does not give an idea about how lower the TTC value is compared to the threshold. Conflict severity distribution needs to be made to understand the actual severity of the conflict. In this study, the concept of minimum TTC is used for determining conflict severity. TTC is a continuous function of time and is estimated for every time step for which the conflicting vehicles are in a collision course. Out of all the TTC values at various points in time, the minimum value of TTC for the two interacting vehicles is considered. Similarly, the minimum value of TTC for all the other vehicle interactions is estimated. Out of all the TTC values estimated for all the vehicle interactions, the lowest value of TTC is considered the minimum TTC. Lower time to collision values indicate that the conflicting vehicles are closer to each other and thus have a higher chance of collision. As shown in Fig. 12, it is clear that the highest severity conflict (minimum TTC value) is obtained at the beginning of the red time and the green time. At the onset of the red time, there are more severe interactions between vehicles, since many vehicles decelerate suddenly. Conflict severity is also high at the beginning of the green time as vehicles start discharging at different rates. During the yellow signal time, the TTC value shows a decreasing trend (more severe conflict) which can be attributed to the dilemma driver behavior where the traffic signal indication changes from green to yellow to red.

Minimum TTC value versus traffic signal timing
The effect of vehicle type on conflict severity is very crucial in understanding safety in mixed traffic conditions. Figure 13 gives the variation in minimum TTC based on follower vehicle type. The lower the TTC value, more severe the interaction. The minimum TTC value obtained was for two-wheelers and three-wheelers, indicating that these vehicles contribute to severe conflict. This might be because in mixed traffic conditions smaller vehicles like two-wheelers and three-wheelers undertake risky maneuvers like sudden deceleration and lane change.

Minimum TTC variation based on vehicle type
Summary and Conclusion
The main objective of this study is to estimate the safety of the signalized intersection at the signal cycle level using TTC and DRAC as surrogate safety measures. More than 4500 vehicle trajectories were extracted from two signalized intersection approaches with varying traffic and geometric characteristics collected using the video capturing technique. The temporal variation of critical conflict w.r.t the signal timing showed that a greater number of conflicts happened at the first half of the red signal time and the first half of the green signal time. The conflicts happening in the first half of red signal time are due to the stopping action of vehicles to the red signal when the vehicles suddenly decelerate to join the queue. The conflicts happening in the first half of green signal time are mainly due to the queue release during the green time. Furthermore, by comparing the difference in the peak trend of the conflict frequency graph it can be concluded that location with longer queue length gives rise to more conflicts in the first half of the green time. This is because, during the start of the green time, the stopped vehicles start to discharge, while other vehicles are arriving at higher speeds to the end of the queue resulting in a higher peak during the green time.
The spatial variation of conflict shows that more critical vehicle interactions are observed near the maximum queue length, indicating that the deceleration zone is dependent on the maximum queue length. Two-wheelers and three-wheelers show higher DRAC values, especially closer to the stop line emphasizing the fact that smaller vehicles instead of waiting at the end of the queue, often move through the available space in the traffic to stop at a distance closer to the stop line. They are observed to be more aggressively decelerating as they approach the stop line. Furthermore, analyzing the lateral movement of vehicle types proved that smaller vehicles percolate laterally in the available gap between other vehicles resulting in riskier lateral maneuvers which lowered the safety standards. The lane-wise proportion of conflict shows that bigger physical size vehicles contribute more toward conflict in lanes closer to the median, whereas the vehicles with smaller physical sizes like two-wheelers and three-wheelers cause more conflicts in lanes closer to the curb.
The effect of vehicle type on the variation of conflict frequency is very crucial in understanding safety in mixed traffic conditions. Conflict frequency per vehicle proportion showed a relatively higher percentage of two-wheelers and three-wheelers contributing to a more severe DRAC value (DRAC ≥ 6 m/s2), indicating that smaller vehicles resort to risky maneuvers resulting in sudden deceleration. Also, it can be noted that the proportion of conflicts caused by three-wheelers was comparatively high especially at TTC < 0.5 s, indicating that they contribute to more severe vehicle interactions. The conflict severity using the minimum TTC value showed that the highest severity conflict was obtained at the beginning of the red time followed by the green time. At the onset of the red time, there are more severe interactions between vehicles, since many vehicles decelerate suddenly. Conflict severity is also high at the beginning of the green time as vehicles start discharging at different rates during the initial queue release. During the yellow signal time, the TTC value shows a decreasing trend (more severe conflict) which can be attributed to the dilemma driver behavior where the traffic signal indication changes from green to yellow to red.
Research Contribution
This study is mainly focused on the proactive safety of signalized intersections in mixed traffic conditions. The use of field-collected video data from different signalized intersections reflects actual driving behavior. One of the major contributions of this study is the automatic identification of critical vehicle interactions and conflict estimation at varying threshold values based on the precise longitudinal and lateral position of the interacting vehicles. To incorporate the non-lane-based movement, the width of vehicles involved is considered. The Matlab code developed takes required inputs depending on user requirements for automatic conflict estimation. This methodology can be further modified to develop a Surrogate Safety Assessment Tool for signalized intersection safety in mixed traffic conditions. This study also analyses the temporal variation of rear-end conflict based on signal cycle time. An important practical application of this study is in estimating the optimal signal timing to reduce the number of conflicts, thus improving safety. Previous studies in lane-based traffic conditions show that optimizing signal timing has resulted in a reduction in traffic conflicts [26]. Furthermore, the effect of various traffic and geometric parameters such as queue length, signal timing, lane type, width on the variation of critical conflict is also explored to assess the safety of signalized intersections at the signal cycle level. Comparing and analyzing the huge amount of trajectory data from two locations with varying traffic and geometric characteristics gives a better understanding of how these parameters affect traffic safety. The variation in conflict severity based on vehicle type gives better clarity on the risky maneuvers undertaken by smaller vehicle types such as two-wheelers and three-wheelers in mixed traffic conditions. In India, two-wheelers contribute to more than 40% of accidents [1]. Spatial variation of conflict proves that smaller vehicles undergo aggressive deceleration especially closer to the stop line and contribute to more than 75% of conflict along the curbside lane. From the traffic video data collected for this study, it can be observed that most of the two-wheelers always try to percolate through the traffic along their desired but haphazard path to occupy the area closer to the stop line during the red time. To achieve better safety traffic control measures such as an exclusive two-wheeler lane, a two-wheeler waiting area near the stop line can be provided. Existing studies show that providing an exclusive waiting area for a two-wheeler near the stop line is very effective in improving signalized intersection safety and efficiency [27]. The inferences from this study can be further modified to improve the safety and operational performance of the signalized intersections in developing countries by optimizing the signal design and implementing a real-time warning system for speed reduction to minimize critical conflicts.
Limitations and Future Scope
The trajectory data used in this study are from two locations. More locations must be incorporated for a better understanding of conflict variation based on signal timing. This study mainly focuses on rear-end conflicts. Other types of traffic conflict within the intersection area such as right-angle conflicts were not considered. More surrogate measures of safety such as MTTC and PET can be incorporated into estimating the conflicts. The influence of internal and external factors such as intersection geometry, presence of countdown timer, signal phase design on driver behavior and impact on traffic conflicts can also be studied. Optimization of signalized intersection safety by changing the signal design can also be studied. Finally, more work is needed to investigate the relationship between collisions and conflicts. This study can be further developed to improve the safety and operational performance of signalized intersections in developing countries.
References
MoRTH (2019). Road Accidents in India-2018. Transport Research Wing. New Delhi: Ministry of Road Transport & Highways. https://morth.nic.in/road-accident-in-india
Yan X, Radwan E, Abdel-Aty M (2005) Characteristics of rear-end accidents at signalized intersections using multiple logistic regression model. Accid Anal Prev 37:983–995. https://doi.org/10.1016/j.aap.2005.05.001
Dandona R, Kumar GA, Ameer MA et al (2008) Under-reporting of road traffic injuries to the police: results from two data sources in urban India. Inj Prev 14:360–365. https://doi.org/10.1136/ip.2008.019638
Sayed T, Zein S (1999) Traffic conflict standards for intersections. Transp Plan Technol 1060:308–323
Archer J (2005) Indicators for traffic safety assessment and prediction and their application in micro-simulation modelling : a study of urban and suburban intersections Doctoral Thesis Stockholm.
Amundson FH, Hyden C (1997) Proceedings of First Workshop on Traffic Conflicts. Institute of Economics, Oslo.
Gettman D, Head L (2003) Surrogate Safety Measures From Traffic Simulation Models Final Report. Publication No: FHWA-RD-03–050 126. https://www.fhwa.dot.gov/publications/research/safety/03050/03050.pdf
Hayward JC (1972) Near-miss determination through use of a scale of danger. Highway Research Board 24–35. https://onlinepubs.trb.org/Onlinepubs/hrr/1972/384/384-004.pdf
Minderhoud MM, Bovy PHL (2001) Extended time-to-collision measures for road traffic safety assessment. Accid Anal Prev 33:89–97. https://doi.org/10.1016/S0001-4575(00)00019-1
Vogel K (2003) A comparison of headway and time to collision as safety indicators. Accid Anal Prev 35:427–433. https://doi.org/10.1016/S0001-4575(02)00022-2
Essa M, Sayed T (2018) Traffic conflict models to evaluate the safety of signalized intersections at the cycle level. Accid Anal Prev 89:289–302. https://doi.org/10.1016/j.trc.2018.02.014
Huang F, Liu P, Yu H, Wang W (2013) Identifying if VISSIM simulation model and SSAM provide reasonable estimates for field measured traffic conflicts at signalized intersections. Accid Anal Prev 50:1014–1024. https://doi.org/10.1016/j.aap.2012.08.018
Ozbay K, Yang H, Bartin B, Mudigonda S (2008) Derivation and validation of new simulation-based surrogate safety measure. Transp Res Rec. https://doi.org/10.3141/2083-12
Behbahani H, Nadimi N, Naseralavi SS (2015) New time-based surrogate safety measure to assess crash risk in car-following scenarios. Transp Lett 7:229–238. https://doi.org/10.1179/1942787514Y.0000000051
Kanagaraj V, Asaithambi G, Toledo T, Lee TC (2015) Trajectory data and flow characteristics of mixed traffic. Transp Res Rec 2491:1–11. https://doi.org/10.3141/2491-01
Charly A, Mathew TV (2019) Estimation of traffic conflicts using precise lateral position and width of vehicles for safety assessment. Accid Anal Prev 132:1–10
Anjana S, Anjaneyulu MVLR (2015) Safety analysis of urban signalized intersections under mixed traffic. J Safety Res 52:9–14. https://doi.org/10.1016/j.jsr.2014.11.001
Pathivada BK, Perumal V (2019) Analyzing dilemma driver behavior at signalized intersection under mixed traffic conditions. Transport Res F: Traffic Psychol Behav 60:111–120. https://doi.org/10.1016/j.trf.2018.10.010
Ghanipoor S, Abbas M (2016) Safety surrogate histograms SSH): a novel real-time safety assessment of dilemma zone related con fl icts at signalized intersections. Accid Anal Prev 96:361–370. https://doi.org/10.1016/j.aap.2015.04.024
Essa M, Sayed T (2018) Full Bayesian conflict-based models for real time safety evaluation of signalized intersections. Accid Anal Prev. https://doi.org/10.1016/j.aap.2018.09.017
Essa M, Sayed T (2015) Simulated traffic conflicts: Do they accurately represent field-measured conflicts ? Transp Res Rec. https://doi.org/10.3141/2514-06
Munigety CR, Vicraman V, Mathew TV (2014) Semiautomated tool for extraction of microlevel traffic data from videographic survey. Transp Res Rec 2443:88–95. https://doi.org/10.3141/2443-10
Indo-HCM 2017 (2017) Indian Highway Capacity Manual (Indo-HCM). CSIR-Central Road Research Institute, New Delhi
Toledo T, Koutsopoulos HN, Ahmed KI (2007) Estimation of vehicle trajectories with locally weighted regression. Transp Res Rec. https://doi.org/10.3141/1999-17
Laureshyn A, Svensson Å, Hydén C (2010) Evaluation of traffic safety, based on micro-level behavioural data: theoretical framework and first implementation. Accid Anal Prev 42:1637–1646. https://doi.org/10.1016/j.aap.2010.03.021
Stevanovic A, Stevanovic J, Kergaye C (2011) Optimizing signal timings to improve safety of signalized arterials. 3rd International Conference on Road Safety and Simulation, Indianapolis. pp 14–16
Jiang X, Zhang G, Zhou Y et al (2017) Safety assessment of signalized intersections with through-movement waiting area in China. Saf Sci 95:28–37. https://doi.org/10.1016/j.ssci.2017.01.013
Acknowledgements
The authors acknowledge the opportunity provided by the 6th Conference of the Transportation Research Group of India (CTRG-2021) to present the work that formed the basis of this manuscript.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of Interest
The authors declare that they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Shahana, A., Perumal, V. Rear-End Conflict Variation at Signalized Intersections Under Non-lane-Based Traffic Condition. Transp. in Dev. Econ. 8, 32 (2022). https://doi.org/10.1007/s40890-022-00167-2
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s40890-022-00167-2