
Abstract
With the help of advanced software, hardware and cutting-edge communication supports, and the future living environments such as smart homes are expected to provide intelligent services and excellent user experience much better than ever. Ideally, indoor multi-modal interactions and ambient changes happened in smart homes could be monitored using ambient intelligence technology for instantaneous human behavior analysis and following human-centered interactions. Such quick feedbacks are significant to the elderly and disabled people, because a successful smart living environment could greatly reduce the burden on their home cares by offering appropriate assistance according to recognized human behaviors. However, due to varied behavioral patterns and imprecise data acquisition, realizing complex human activity in real-time without controversy over privacy is one of the biggest challenges for scientific community. In this paper, we propose an innovative inference engine based on formal concept analysis to recognize complex human activities, including sequential, interleaved, and concurrent patterns performed by an occupant in non-intrusive smart homes. Besides the on-the-fly recognition, our engine adopts a loose coupling architecture that strengthens the software robustness, reliability, and knowledge reusability.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
As people live longer and low birth rates all over the world, population aging has become a worldwide crucial issue in the recent decades [1]. When cheering for the great improvement in health and longevity, we also need to calmly think about its tremendous challenges in the social and family aspect [2]. Elderly people usually require more long-term home cares because of the gradually weakened physical conditions, especially the aging-related disabilities. As one of the most typical ones, cognitive disability has attracted much attention from scientific communities [3]. According to the recent research [4], most of cognitive impairment symptoms happened in middle-aged and elderly population are related to the Alzheimer’s disease, which is also the most common cause of dementia. Progressively, severe deterioration in cognitive skills makes elderly people who have difficulties in living independently. Comparing with healthy people, they tend to produce more abnormal behaviors which make normal activities become threatening as well [5]. The most direct and efficient intervention is to employ family caregivers to take care of elderly people day and night. However, it will increase the burdens of family and lead to significant escalation in home care expenditures.

Architecture about intelligent assistance based on sensor network and expert system in smart homes
To get rid of this dilemma, smart environments, a new paradigm of future living environments, have become a new promising solution [6, 7]. With huge commercial prospects and fast development of information and communication technologies, smart environments incorporate multiple cutting-edge techniques such as ambient intelligence (AmI) [8, 9], Internet of things (IoT) [10], social robotics [11] and human–computer interaction [12, 13]. They try to take full advantage of computer science to help elderly and disabled people live on their own with less nursing care. Based on the real-time analysis of indoor conditions, appropriate feedback such as intervention or assistance will be duly given out. Thus, the future living environments which rebuilt into smart homes using AmI technique will become more comfortable and offer a range of assisted services due to more consideration about context awareness, human factors, and ergonomics between occupants and environments [14].
As one of the core techniques of smart environments, IoT could build a network of objects embedded with electronic components such as sensors, actuators, or RFID tags to monitor indoor conditions in real-time [7, 10, 15] (see Fig. 1). These objects include home appliances, wearable devices, household furniture, components of apartment (e.g., door and windows), and the other daily commodities.
As a consequence, pervasive electronic components continuously generate enormous amounts of data describing environmental (positions, movements, temperature, pressure, etc.) and consumption conditions (energy or resources) [13]. Generated data constitute temporal and sequential patterns which are usually heterogeneous and chaotic. With the help of ubiquitous sensor networks, most of human behaviors performed in smart homes will trigger passive sensor events and be captured by specific IoT components. Thus, it is possible to realize real-time activity monitoring as well as behavioral pattern analysis to avoid potential threats at their earliest stages. Moreover, for the purpose of providing appropriate assistance, smart homes can also understand occupant’s real intentions (i.e., activities willing to do) hidden behind observable behaviors by expert system as early as possible [16].
Because of the periodicity caused by people’s habit, the majority of behavioral patterns describing an activity are regular and predicable from the historical data [17]. A series of cognitive assistance can be offered based on the activity recognition and prediction given observations, namely, the captured sensor data.
The objective of behavioral pattern analysis is to recognize ongoing activities rather than classify the completed ones [18]. Activity prediction is essential to help occupants prevent dangerous situations before they occur. Once current behavioral pattern tends to be anomalous or threatening, we hope the smart homes could determine whether it is necessary to implement preventive interventions or notice the family members, neighbors, or caregivers.
However, complex behavioral pattern analysis is always a great challenge for smart home applications [19]. In most cases, human behaviors are basically planed and performed in continuous and complex ways. Compared with the behavioral patterns of independent activities, the complex ones are usually sequential without clear boundaries, sometimes even interweaved due to personal thinking ability and advanced planning such as interleaved or concurrent ways.
Besides, before the widespread commercialisation, the reliability of smart homes is another important factor [20]. It includes activity recognition from ambiguous and unreliable sensor data, high modularity, flexibility, etc. As summarized in [21], a good smart home must provide reliable positioning and measurement of sensor data and have reliable algorithms for evaluating the occupant’s lifestyle. Considering these requirements in reliability, our main contribution of this paper is to propose a robust activity inference engine mining complex behavioral patterns in non-intrusive sensor-based smart homes. The innovative inference engine is based on formal concept analysis and could recognize ongoing activities using partially observed unreliable sensor data from a heterogeneous sensor network. Its modeling is an attempt to retrospect sequential patterns of historical sensor data stream to construct a reliable case-based model. It takes advantage of context-aware rules to prompt individuals for well scheduling and carrying out complex activities. Moreover, the design of inference engine uses a loose coupling architecture to strengthen the reliability in robustness and knowledge reusability.
The remainder of this paper is organized as follows. Section 2 outlines the related works about complex activity recognition in smart environments. Section 3 introduces the background of activity recognition and knowledge representation by formal concept analysis. The proposed inference engine is also presented in the section. Section 4 presents our experimental results. Section 5 discusses the performances and emphasis the reliability of our methods. Finally, the conclusion is reported in Sect. 6.
2 Related work
Because of numerous generated data, ubiquitous computing technique, especially large-scale data analysis, has become an efficient solution to handle with AmI problems. Most of raw data contain valuable information including regular patterns or useful cases. At the same time, they are usually difficult to use directly to solve practical problems due to the lack of efficient knowledge discovery and retrieval strategies. Thus, it is essential to choose an effective representative form to index, organize, and retrieve unstructured information [15].
With the help of knowledge representation and data mining techniques, useful information can be discovered from large-scale continuous data stream. On the one hand, different types of data stream need to be analyzed by suitable approaches on the basis of varied data features. On the other hand, the features are normally related to the ways of data acquisition.
For example, the vision-based one uses facilities like cameras, webcams, kinects, or social robots to capture sequences of images [22]. Each image is a set of pixel values. Vision-based solutions capture more details about environments and contexts in the data stream containing high information entropy [23]. Thus, their performances are also better than others. Those pixel values indicate the meta-data such as the real-time positions of monitored objects and as the latest states of moving objects. Image processing and pattern recognition [24,25,26] are common methods to handle with pixel data stream. However, because vision-based solutions directly acquire highly sensitive personal information, the trade-off between privacy and excellent performances has always aroused controversy [27]. That is why more and more research about AmI applications in smart homes has adopted the non-intrusive data acquisition such as sensor-based solutions.
The sensor-based one depends on the wireless sensor network to build ubiquitous computing environments. Most of the non-intrusive components only capture the states of attached or embedded objects, react passive activation and transfer numerical, binary, or categorical values through wireless communication. All the captured data contain a little personal information and generate sensor data stream. Unlike homogeneous pixel values of vision-based one, it is difficult to process large-scale heterogeneous sensor data in a unified data structure. In this paper, we focus on the sensor-based pattern analysis to exploit useful behavioral patterns from historical data and to recognize activities from real-time data stream.
Due to the difficulties of complex behavioral analysis in non-intrusive smart environments, there are only a few studies in this domain. Ruotsalainen et al. [28] introduced a genetic algorithm for detecting interleaved patterns from event sequences. The algorithm has been utilized in partitioning the event sequence and matching subsequences with the specific pattern templates. Thus, this method is limited by the low generalization performance.
Gu et al. [29] built activity models based on Emerging Patterns describing significant changes of itemset supports and differences between two classes to recognize sequential, interleaved, and concurrent activities. Rashidi et al. [30] introduced an unsupervised method of discovering frequent interesting patterns of activity and grouping similar discovered patterns into activity definitions. A boosted version of a hidden Markov model is created to represent and recognize the activities and their variations. The limitation of these methods is that they only considered specific subsequences occurring frequently, and ignored some important ones with imbalanced distribution in the data set.
Interleaved hidden Markov models were introduced for recognizing multitasked activities [31]. After a small modification of the classical HMM model, the improved model was able to better predict transition probabilities by recording the last object observed in each activity. Hu and Yang [32] proposed a two-level probabilistic framework for multiple-goal recognition including concurrent and interleaved activity recognition. They used skip-chain conditional random fields (SCCRF) and a correlation graph for modeling interleaved and concurrent activities. A detailed performance comparison of different techniques involving naive Bayes and the variations of hidden Markov Model was given in [33]. These methods usually have strong noise immunity. The imperfection mainly surrounds computational difficulties in the training phase. It is usually difficult to train models with a large number of parameters or large state spaces.
For the other methods, Hall et al. [34] used finite-state automaton to decompose the total power load and distinguish each individual usage of appliances. Thus, interleaved activities related to the energy consumption are indirectly discriminated. However, it could not handle with the other kind of activities without the usage of electrical devices.
Riboni et al. [35] proposed an unsupervised method to recognize complex activities by exploiting the semantics of activities, context data, and sensing devices through ontological and probabilistic reasoning. Roy et al. [36] proposed a hybrid recognition model based on probabilistic description logic. Okeyo et al. [37] combined ontological and temporal knowledge representation to recognize composite activities. The ontological activity modeling establishes relationships between activities and involved background knowledge. The temporal one defined correlations between constituent activities of a composite activity. Saguna et al. [38] proposed a conceptual framework for spatio-temporal context-aware systems to infer interleaved and concurrent activities. However, these knowledge-based methods require more extra knowledge or predefined inference rules defined by domain experts. Their high requirement about domain knowledge makes the maintenance or extension difficult for domain freshmen.
A logic framework based on four-level lattice was defined for plan recognition in our earlier studies [39]. Although its complexity determines that it cannot be widely used in ubiquitous computing, it also prompts the research to solve AmI issues through more mature lattice-based models. Another interesting research introduced by Ye and Dobson [40] investigated the performance of semantic data structure called context lattices to recognize activities in smart homes. Further research proposed a knowledge-driven approach for concurrent activity recognition [41]. However, their methods largely depend on domain knowledge, predefined logic expressions, and operations; these factors greatly reduce the efficiency and flexibility.
Based on the above considerations, formal concept analysis (FCA) has become our first choice to represent and extract knowledge from large volume of unstructured data for the reason of its excellent performance [42]. It is widely used in various domains like knowledge discovery, ontology learning [43], semantic annotation [44], information retrieval, and recommender system [45], to construct a knowledge graph or graphical ontology for data organization, visualization, or mining. Similar to association rule learning, formal concept analysis can fast discovers useful itemsets. Nevertheless, it lacks efficient method to retrieve them. Thus, in [5, 46, 47], FCA first introduced to recognize singleton activity with clear boundary from sensor event stream and to detect abnormal patterns on-the-fly. The treated stream is required to be well segmented with clear boundary. Moreover, each sensor stream must only have one activity. These assertions are too ideal to be satisfied in reality. Thus, in this paper, we propose an improved algorithm based on FCA to recognize complex behavioral patterns from continuous sensor events.
3 Inference engine for activity recognition
In this section, first of all, we introduce some notions about simple and complex ADLs in Sect. 3.1. Then, a common multilevel granularity to solve activity-centered problems in smart environments is highlighted in Sect. 3.2. And then, we apply the formal concept analysis theory to the AmI issues and explain the principles in Sect. 3.3. Next, we import an innovative search algorithm to retrieve knowledge in the FCA-based knowledge base in Sect. 3.4. After that, on the basis of our previous work, we demonstrate how to recognize complex ADLs on-the-fly by our new approach in Sect. 3.6. Finally, we highlight a method called RMSD to refine the predictive activities in Sect. 3.7.
3.1 Background of activity recognition in smart homes
To live independently in their own home, elderly people should at least be able to individually complete basic Activities of Daily Living (ADLs) [48]. ADLs refer to people’s daily self-care activities. As a term used in health care, the quality of ADLs performance has been regarded as an important measurement of one person’s functional status. It is also the minimum requirement for living independently.
According to the comprehensive research of Lawton et al. [49] in the behavioral assessment of elder people, ADLs could be classified by human functionality as two types:
-
Basic ADLs simple tasks about functional mobility and physical self-maintaining activities such as toilet, feeding, dressing, grooming, ambulation, bathing, etc.
-
Instrumental ADLs complex tasks that are not necessary, but more complicated than basic ADLs which need more thinking, planning and interactions. For instance, telephone, food preparation, housekeeping, laundry, responsibility for own medication, etc.
Basic ADLs are usually the short-term behaviors with short execution times. Moreover, they seem to be independent and not collaborative with each other.
Furthermore, two or more instrumental activities could generate more complex behavioral patterns. These patterns with collaborative interactions are more close to the real scenarios [19]. In the following definitions, we suppose that each mode is taken by only one occupant. Similar definitions have also been proposed in the other AmI researches [32, 50, 51].
-
Sequential ADLs activities are performed one after another in a continuous and sequential mode without interweaving execution (see the execution of activities \(a_x\), \(b_y\) in Fig. 2). For example, an occupant prepared toasts after preparing a cup of coffee. Moreover, each ADL is independent and there is no shared behavior between any two successive ADLs.
-
Interleaved ADLs the performance of ADLs interweaves together with pauses. As shown in Fig. 3, an occupant will temporally suspend current ongoing ADL and turn to do another one, after a while, the suspended ADL will be done sooner or later. In reality, when an ongoing ADL needs to wait for the processing or results, the occupant usually do another ADL during the waiting time (e.g., during the waiting of cooking spaghetti, the occupant turned to prepare a cup of tea). Behaviors belonging to different ADLs are frequently scheduled among execution processes.
-
Concurrent ADLs in this mode, more than one activity is carried out simultaneously in a period of time. Although it is similar to the interleaved ones, the biggest difference is that different behaviors could be done at the same time (see Fig. 4). Because of no conflict, a person could telephone by mobile phone while cooking.

Sequential mode of ADLs execution

Interleaved mode of ADLs execution

Concurrent mode of ADLs execution

Multilevel granularity in smart environments
The issue of ADLs recognition is a very active topic in the application of ambient intelligence [13, 52, 53]. Activity tracking and recognition are also the most desirable requirement of family caregivers for smart home technology [54]. It refers to the long-term behavioral intention recognition from various sequential patterns which are constituted by temporal behavior-related data. Given a sequence of observations, the ADLs recognition task is to associate activities with part of observations. Moreover, it can be characterized by the relationship that exists between the observed occupants and the observing agent, which means the ubiquitous sensor network.
For the reason of varied living habits, personal preferences or the other physical, mental, and culture factors [55], an ADL could have multiple behavioral patterns to describe itself. Even if having almost the same participant actions, two patterns could be totally dissimilar because of different execution orders, recurrent or optional actions.
3.2 Multilevel granularity in smart environments
Figure 5 depicts a common multilevel granularity to solve activity-centered problems in smart environments [46, 56, 57]. Three levels of granularity represent different kinds of behavioral elements. Fine-grained components are located at lower levels in the structure and coarse-grained ones are positioned at higher levels. Each coarse-grained supercomponent is composed of one or more fine-grained subcomponents.

Matrix representing the activities \(g_i\) carried out in the kitchen and their atomic actions \(m_x\)
The objective of ADLs recognition is to identify the most probable coarse-grained ADLs generating the observed fine-grained subcomponents. Normally, an ADL is composed of more than one observable action. In other words, several short-term targets have joined together to form a long-term intention. An action is atomic, which indicates a meaningful element describing a short-term target. In addition, each action is measured by one or more sensor events. Thus, in the case of ADLs recognition, the coarse-grained target classes should be the high-level ADLs and the fine-grained features could be either sensor events or actions.
3.3 Knowledge representation and modeling
Formal concept analysis (FCA) is a mathematical theory that derives concept hierarchies from a given data set. It aims at first clustering similar targets variables of interest sharing the same ontological features, and then indexing these clusters by a structural preorder called partial order. Correlations between the individuals and features could be represented as homogeneous binary relations. In reality, binary relations describing two sets of different things widely exist in most of the scene.Footnote 1 When we use FCA to construct knowledge base, FCA requires to choose suitable target classes and corresponding features for modeling due to the restriction of binary relations.
After the brief introduction about FCA, in the following words, FCA components including formal context, concept-forming operations, formal concept, formal lattice, and Hasse diagram will be presented, as well as their roles in modeling and the constructions of the inference engine.
3.3.1 Knowledge storage by formal context
To construct the inference engine by FCA, first, unstructured knowledge must be stored in a specific data structure called formal context for the easier utilization and indexation.
A formal context \(\mathcal {K}\) is the mathematical abstraction of a scene. It aims to transfer unstructured information into structured data. It could be represented as a triplet \(\mathcal {K}(G,M,I)\) that consists of two disjoint sets G and M. Set I represents their Cartesian products as binary relations, which defines the different issues of ADLs recognition. The elements of G representing coarse-grained target classes are called objects, and the elements of M representing fine-grained features are called attributes. Attributes are the descriptors of objects. To express that object g is related with attribute m, we write gIm [58].
The triple \(\mathcal {K}(G,M,I)\) could be represented and visualized as a \(\vert G \vert \times \vert M \vert \) matrix. The matrix representing context \(\mathcal {K}\) provides an opportunity to encode unstructured or heterogeneous information to a machine-recognizable data structure. With the help of formal context, FCA can further discover the dependencies between target classes G and feature variables M.
Application 1
In our case, both observable sensor events and atomic actions could be treated as the fine-grained features of target classes G. To facilitate the following introduction, we suppose that the fine-grained features M indicate the observed sensor events, then binary relations I define the issue as activity recognition in the stream of sensor events.
Considering the architecture in Fig. 5, \(\forall g\in G\) represents target activities, and \(\forall m\in M\) could be indexed sensor events or atomic actions. Given a concrete example, there are seven activities about preparing breakfast: PrepareHotChocolate (\(g_1\)), PrepareMilkTea (\(g_2\)), PrepareSpaghetti (\(g_3\)), PrepareCaffèMocha (\(g_4\)), PrepareCereals (\(g_5\)), PrepareToast (\(g_6\)) and PrepareSandwich. There are also 12 actions shared among these activities: boil water (a), prepare tableware (b), add cocoa powder (c), pour cereals (d), take out breads (e), take out teabags (f), take out spaghetti (g), add sugar (h), add milk (i), add sauce (j), use toaster (k), and use microwave oven (l). If a sensor event or action m is in the sequence describing activity g, then a cross is filled in row g and column m. For example, \(\alpha =\){\(b\prec b\prec d\prec c\prec d\prec i\prec l\)} is a sequence describing \(g_5\), then five crosses are automatically filled in row \(g_5\) (see Fig. 6).
3.3.2 Similarity maximization by concept-forming operations
In the conventional clustering methods, similarity metrics are essential to generate clusters [59]. Likewise, there also exists the metrics in FCA to cluster similar target classes sharing the same ontological features.
To exploit useful information from the FCA matrix and maximize their similarities, a pair of closure operations, so-called the concept-forming operators, is induced to discover associations.
For a subset of objects \(G_1\subseteq G\), we define
as an operation to find out the common features \(G'_1 \subseteq M\) shared by all the objects in \(G_1\). Likewise, for \(M_1\subseteq M\), we define
as another operation to find out all the objects \(M'_1\subseteq G\) sharing the common features \(M_1\) at the same time [58].
Their combination could maximize the dependency and similarity in a pattern itemset and make it a stable closure, which is also a cluster.
Application 2
\(M'_1\) indicates all the possible activities sharing the common features \(M_1\). In other words, if \(M_1\) are partially observed data, \(M_1'\) reveals all the possible activities given those observations.
For instance, if actions \(\{bc\}\) are detected by the sensor network, according to \(\{bc\}'=\{g_1g_4g_5\}\), the most possible ongoing activities are \(g_1,g_4\), and \(g_5\). However, itemset \(\{bc,g_1g_4g_5\}\) is not a stable cluster due to \(\{g_1g_4g_5\}'=\{bci\}\).
3.3.3 Cluster representation by formal concept
After the definition of similarity metrics, FCA can cluster similar target classes in ontology for knowledge discovery.
A concept is a pair \((G_1, M_1)\), where \(G'_1=M_1\), \(M'_1=G_1\). \(G_1\) and \(M_1\) are called the extent and the intent of a concept [58]. Because of \((G'_1)'=(M_1)'=G_1\), each concept is a closure under the concept-forming operations. \(\mathcal {B}(G,M,I)\) denotes a universe containing all the concepts of a context \(\mathcal {K}\).

Hasse diagram of matrix in Fig. 6
Concepts are the smallest FCA units having discovered knowledge. Each concept is a cluster corresponding to an inference. Its intent refers to all the observable features indicating the centroid of cluster, and the extent refers to all the similar objects sharing the intent \(M_1\). The properties of closure ensure that the internal ontological similarity of cluster between the extent and intent is maximized.
Application 3
Each concept clusters similar activities based on the shared sensor events or actions in the intent. Furthermore, if the observed data belong to the intent, the elements in the extent indicate all the possible ongoing activities given those observations:
As shown in Eq. (3), no matter in which order they are captured by a sensor network, if actions \(\{bci\}\) are observed, the most probable prediction about the ongoing activity will be chosen among \(g_1,g_4\) and \(g_5\).
3.3.4 Cluster indexation by formal concept lattice
As of now, similar objects were successfully clustered by different centroids (i.e., common features). Next, FCA will order all the discovered clusters by a structural preorder in order theory. The objective is to index and retrieve all those clusters efficiently for constructing a graph-based knowledge base.
A lattice \( (\mathcal {B},\preceq )\) is an ordered version of \(\mathcal {B}(G,M,I)\). All the concepts in \(\mathcal {B}\) are ordered by a predefined partially ordered symbol \(\preceq \) indicating hierarchical relations between concepts.
Suppose \( (G_1,M_1) \) and \( (G_2,M_2) \) are two concepts of \(\mathcal {B}\), \((G_1,M_1)\) is called the subconcept of \((G_2,M_2)\) if either \( G_1 \subseteq G_2 \) or \(M_2 \subseteq M_1\), written as \((G_1,M_1)\preceq (G_2,M_2)\). The symbol \(\preceq \) is named as the hierarchical order. Meanwhile, \((G_2,M_2)\) is the superconcept of \((G_1,M_1)\). It is worth pointing out that the subconcept and the superconcept of a concept are not unique in \(\mathcal {B}\). The construction of lattice is a process that discovers all the concepts of a context \(\mathcal {K}\) by the concept-forming operations, and orders them by the order.
Application 4
Suppose that three concepts, {\(g_1g_5,\)bcil}, {\(g_1g_4g_5,\)bci}, and {\(g_1g_2g_4g_5,\)bi}, were discovered from the matrix in Fig. 6. As shown in Eq. (4), the last two concepts are the superconcepts of the first one:
The relations among inferences are established by the hierarchical order. Moreover, the prediction about the most possible ongoing activities frequently changes according to different observations in different stages.
3.3.5 Knowledge base visualization by Hasse Diagram
In mathematics, a Hasse diagram is a graph depicting a finite partially ordered set. In our case, it is a visualization of lattice \((\mathcal {B},\preceq )\) representing concepts as nodes (see Fig. 7).
There are two special nodes in a Hasse diagram: the topmost one \(\{G,\varnothing \}\) Footnote 2 named Supremum and the lowermost one \(\{\varnothing , M\}\) named Infimum. Nodes are connected with edges named Galois connection which denotes the partial order \(\preceq \) between nodes [58]. A Hasse diagram manages a knowledge base through its graph structure. For this reason, to manage knowledge information like unstructured behavioral patterns, first of all, the topic-related target classes and the feature variables are extracted from unstructured patterns. And then, the correlations between two sets of variables are maximized by concept-forming operations. After that, similar target classes are clustered by different centroids. At last, all the clusters are indexed by means of the partial order. Once the knowledge base is built, the next step is about to design efficient algorithms to incrementally retrieve specific behavioral patterns from the FCA-based graphical knowledge base.
Application 5
As can be seen from Fig. 7, concepts are organized by different levels. From a higher level to a lower one, the amount of observation increases and the scope of possible activities shrinks. Using successively observed data to incrementally infer ongoing activity is the core idea of the inference engine.
3.4 Inference process
In the following words, we present an innovative search algorithm to retrieve knowledge in the knowledge base.
3.4.1 Principle of real-time knowledge inferences
As summarized earlier, all the inferences about the possible ongoing activities given partial observations are encapsulated in the nodes of the hierarchical lattice. Thus, as an expert system for behavioral pattern recognition, the FCA-based solution is to use efficient algorithms to retrieve useful patterns in the graphical knowledge base using sequential observations.
Most of graph search algorithms must traverse the whole graph to locate targets every time. When new observations are captured, they could not recall or continue from the last interrupted position and have to start over again for searching updated \(\alpha \). For these reasons, we propose a new graph search algorithm to locate target concepts incrementally in the FCA-based models. On one hand, the new algorithm improves the search efficiency. On the other hand, it also maintains the consistency of reasoning.
Suppose that a sequence \(\alpha \) is an ordered list of observed data, denoted as \(\alpha = \{\alpha _1 \prec \alpha _2 \prec \cdots \prec \alpha _m\}\), where \(\alpha _j \prec \alpha _{j+1}\) means that \(\alpha _j\) occurs before \(\alpha _{j+1}\). Besides, we define a token to locate the local optimal concept having the smallest intent in size containing the observations in \(\alpha \). The reason behind such location is to avoid the loss of predictions.
The transition of token in the diagram is the incremental inference process caused by the extension of observed data. In a Hasse diagram, higher level concepts have smaller intents due to less observed data. Thus, the topmost concept containing \(\alpha \) is the local optimal one. This hypothesis is described in Eq. (5) as follows:
where \(T_b\) is the smallest superset of \(\alpha \) and owned by the topmost concept \((T_A,T_b)\). For example, in Fig. 7, if \(\alpha =\{b\prec i\}\), then node 2 \(\{g_1g_2g_4g_5,bi\}\) is the topmost concept that we are looking for. If we choose another one (e.g., node 6 \(\{g_1g_4g_5,bci\}\)) instead of the topmost one, several predictions will be missing (e.g., \(\{g_1g_2g_4g_5\}-\{g_1g_4g_5\}=\{g_2\}\)) and could never be found in the following searches.
3.4.2 Knowledge retrieval
Breadth-first search (BFS) is one of the most common graph search algorithms. The main idea is to explore all the neighbor nodes in the same level before moving to the next level. Because of successively extended \(\alpha \), in our case, BFS is more efficient than another one called depth-first search (DFS) and chosen as the base of our new algorithm.
We propose a new half-duplex graph search algorithm (HDGS) to locate each local optimal concept for successively extended \(\alpha \). As can be seen from the name, HDGS consists of two directions search. First, the top-down search locates the first discovered concept containing \(\alpha \). And then, starting from this concept, the bottom-up search turns back along the hierarchical order and looks for the topmost concept containing \(\alpha \). More details about the HDGS algorithm are sketched in Algorithms 1 and 2:


In pseudo-code (2), we need to pay attention to Line (12) which seeks the topmost concept having the minimal cardinality of intent containing \(\alpha \). Due to Eq. (5), the local optimal concept has smaller cardinality than the other ones.
3.5 Simple ADLs recognition
The simple ADLs recognition is a process continuing to locate local optimal concepts given successively extended \(\alpha \). For instance, \(\alpha = \{b\prec c\prec b\prec h\prec i \prec h \prec l\}\), Table. 1 is the illustration of recognition process. The symbol \(\curvearrowright \) indicates the transition of token.
Beyond the issue of locating local optimal concepts, we also need to consider another tough issue about multilevel inheritance. It is a very common situation in AmI context due to diverse lifestyles and personal habits. Besides the flexible execution orders, an activity could also be accomplished by alternative ways like adding or omitting optional events [5, 56]. For instance, PrepareCoffee(\(g_4\)) and another three derived activities about preparing coffee: PrepareBlackCoffee(\(g_1\)), PrepareCoffeeWithoutMilk(\(g_2\)), and PrepareCoffeeWithoutSugar(\(g_3\)), have the multilevel inheritance relations as \(g_1\subset g_2, g_3\subset g_4\).
Therefore, the retrieval strategy that we adopted is based on the greedy manner. That is, if an activity is recognized, its completeness will also be verified until all the necessary events in the intent have been done. If it belongs to one of the inherited activities, we continue adding observed data into \(\alpha \) until token t shifts to the Infimum \(\{\varnothing , M\}\), which means that all probable activities are recognized in the previous extensions.
3.6 Complex ADLs recognition
Compared with the single ADLs recognition, the complex one refers to distinguish mixed patterns belonging to different activities.
As mentioned, each node of Hasse diagram is a cluster regrouping ontological-similar objects that shared common features. For any activity, no matter how varied its execution orders are among sensor events, the set of corresponding patterns are normally in the same node in the Hasse diagram due to the FCA-clustering. Furthermore, a behavioral pattern could derive many inherited patterns representing as adjoining nodes by adding or refining optional sensor events. Thus, a node representing similar activities and its leaf nodes representing the inherited nodes define a larger cluster having the similarly ontological relations among internal activities.
If incoming data are excluded by such a cluster, it means that the data have strong ontological differences with internal activities. As a result, the incoming data are classified as an outlier of the current plan which is being executed and has to be put into another one. The new one starts a new search with a new token.
The principle of deciding whether observed data are necessary to be excluded or not by current plan is determined by the diagram. Suppose that a node \((G_1,M_1)\) is located by the token, the set of relevant data \(R_e\) given a target class g is given by Eq. (6):
where \(a'\) is the concept-forming operation shown in Eq. (1). All the other data, no matter indexed, or not by the lattice, will be classified as the outliers of the current plan, because the Infimum is located by the token. Once an outlier is detected, a provisional boundary will be marked and a new plan for caching will be created at the same time. The search of the current plan will also rollback from the Infimum to the previous position.
Suppose \(\alpha =\{b\prec e\prec b\prec c \prec i \prec b \prec l \prec g \prec k \prec h\}\) indicating interleaved activities PrepareHotChocolate (\(g_1\)) and PrepareToast (\(g_6\)). There is also an unreliable data g (take out spaghetti). Table 2 depicts the complex ADLs recognition process. The symbol \(\circlearrowright _{Infimum}\) indicates the rollback operation from the Infimum.
At round 4, when c is observed, \(\{bebc\}\) is excluded by current plan, because no subconcept of node 5 contains these observations except the Infimum. Thus, a new plan is created to cache c and launches a concurrent search. At round 8, because g is excluded by all the existing plans, a new concurrent one is created at that moment to cache g. Activities \(g_6\) and \(g_1\) are finally recognized at round 9 and 10, because their sizes of extent are equals to 1 and all the required observations in the intents are observed.
Figure 8 illustrates the interweaving situation. There are totally three plans \(P_i\) (\(i\in \{0,1,2\}\)) in the figure. \(P_0\) is the initial plan. \(P_1\) and \(P_2\) are created when observed data are irrelevant to all the existing plan. Squares indicate two states of observed data: the black ones indicate that the observed data are relevant to the patterns in the present \(P_i\) (i.e. hit), and the hollow ones indicate that the data are irrelevant (i.e., miss). For incoming data, it could trigger three possible states:
-
Strictly belongs to one plan: the observed data belong to a unique plan. For example, R1, R2, R3, R4, R5, R7, R8, R9, and R10 in Fig. 8.
-
Belongs to more than one plan: it always happens with concurrent ADLs. For example, R6 in Fig. 8.
-
Belongs to none of the existing plans: In sequential ADLs, it is the moment triggering the boundary detection. In interleaved ADLs, the occupant may start to do another activity or an irrelevant action, or the system may receive an unreliable data. For example, R4 and R8 in Fig. 8.
At the end of the data stream, a completeness check will verify all the existing plans. There are two objectives: first of all, the amount of predictive activities will be checked. The plan having too many predictive activities will be abandoned due to ambiguity. Otherwise, a further check will verify the completeness of each activity calculated by Eq. 7.
where \(\vert g'_i\cap \alpha \vert \) indicates the amount of observed data and \(\vert g'_i\vert \) indicates the required one. An activity having low completeness will be abandoned. In Table 2, activity \(g_3\) was finally abandoned due to low completeness, and the cached data g were identified as an unreliable data.
3.7 Inference assessment
Because of a few observed data, a local optimal concept usually has more than one candidate in its extent, which means that there will be more than one prediction. Without an efficient assessment, redundant predictions will be ambiguous and useless to make decisions for real-time assistance. In this case, we desire to evaluate the relevance of each prediction in a local optimal concept and choose the most relevant one as the local optimal prediction.
As mentioned in the previous sections, an ADL \(g_i\) could be accomplished by alternative patterns because of different personal preferences. Furthermore, these derived patterns reflect on flexible execution orders, repetitive events, adding or omitting optional events, etc. At the same time, everyone also has his own relatively stable preference to execute an ADL. Namely, for the same occupant executing an ADL, there are only a few deviations among each execution. Based on this hypothesis, we take advantage of historical patterns containing the preferences of an occupant to generate a knowledge database called accumulated matrix. For each event, we calculate its expectant position appearing in each ADL to establish a series of naive distributions.

Interweaving plans
To measure the context similarities between historical patterns and current incomplete ongoing ADL, average deviations are calculated using root-mean-square deviation (RMSD). It makes a quantitative comparison as an assessment to estimate how well the current sequence fits historical data. A lower RMSD score indicates that a prediction is more accurate due to excellent fitting with historical patterns.
We propose our assessment as follows: for each candidate \(g_i\) in the extent, under the condition of executing \(g_i\), we calculate the deviation between actual average positions in \(\alpha \) and the accumulated ones in the matrix. Thus, the local optimal prediction should be the one with minimal deviation which has the best fitting in comparison with historical data. Obviously, our assessment consists of two modules: accumulation and evaluation.
3.7.1 Accumulation
For each event \(\alpha _j\) in a training item \(\alpha \), a complete sequence of events of ADL \(g_i\) (i.e., \(\alpha _j\in \alpha \), \(\alpha \in g_i\)), we update the accumulated value of the corresponding element \((g_i,\alpha _j)\) in the accumulated matrix by Eq. (8):
where j is the position of \(\alpha _j\) in \(\alpha \). \(\sigma '_{ij}\) is the previous accumulated value and \(\sigma _{ij}\) is the newly updated one. Equation (9) represents the same accumulation in another global view:
where \(N_{ij}\) represents the occurrences of element \((g_i,\alpha _j)\) existing in the whole training data set. \(\sigma _{(ij,k)}\) is the position of \(\alpha _j\) in the kth training item describing ADL \(g_i\).
3.7.2 Evaluation
When an incoming event \(\alpha _j\) was observed, first of all, we calculate its average position \(\overline{\varphi _{j}}\) in the current sequence \(\alpha \). It is calculated by Eq. (10).
where \(\vert \alpha \vert \) is the size of current sequence \(\alpha \), and \(\#\alpha _j\) is the occurrences of \(\alpha _j\) in \(\alpha \). The condition \(\alpha _k=\alpha _j\) is necessary to integrate \(\#\alpha _j\) discrete positions of \(\alpha _j\).
And then, for each candidate \(g_i\), we calculate the deviation of \(\alpha \) given \(g_i\). Equation (11) expresses the root-mean-square deviation \(D_i\) of current sequence \(\alpha \) executing \(g_i\):
where \(\sigma _{ij}/N_{ij}\) is the expectant position obtained from accumulated matrix.
Thus, RMSD scores \(\{D_1,D_2,\ldots ,D_i\}\) of candidates in the current extent \(G_1=\{g_1,g_2,\ldots ,g_i\}\) were calculated. The element \(g_i\) having the minimal RMSD value is the local optimal prediction because of the best fitting with historical patterns.
4 Experiments
The performances of inference engine are tested using two data sets created in two smart environments, LIARA smart home, and CASAS testbed. The common classification metrics, F-measure and accuracy [60, 61], are used to evaluate the performance of activity recognition. All the experiments are carried out on the computer with tech specs of Intel Core i7 Processor 2.4GHz and 8GB RAM, under Ubuntu 16.04.
4.1 LIARA smart home
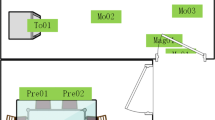
LIARA smart home is a prototype of future living environments which concentrates the innovation solutions surrounding smart environments based on the ambient intelligence to provide real-time cognitive assistance for the disabled or elderly people. It consists of various sensors, actuators, passive RFID tags, tablets, and wearable devices to monitor indoor environmental changes caused by human behaviors in a non-intrusive way.

Sensor layout of the LIARA smart home
Figure 9 shows the prototypical design of LIARA smart home. Objects in the figure are embedded with measurable electrical components. For instance, infrared, light sensors, and RFID antennas have been installed on the walls. The oven in the kitchen zone is monitored and controlled by a built-in micro computer and temperature sensors. A tablet is also embedded on the refrigerator. The water consumption is measured by water sensors, and the power consumption is recorded by a power analyzer located at the main electrical panel. The open and close states of cabinets could be detected by binary sensors. Pressure mats are placed in the bathroom to trace occupants’ movements. Beside, passive RFID tags are attached on all the other daily commodities to track their spatial positions.
Using the infrastructure above, we created a data set to recognize complex activities given atomic actions. The sequences of actions are generated from our previous research: the passive RFID signal parsing [62] can identify the usage of items and the electrical devices identification [63] can identify the usage of appliances. To create training and test data, first of all, one participant performed each activity 20 times, and then, he was allowed to freely perform activities in sequential, interweaving, or parallel way. Due to complicated scenarios and much more interactions with appliances and food ingredients, we choose instrumental kitchen activities as our research objects. Twelve activities are described by sequentially observed actions (see Table 4). As shown in Table 3, LIARA data have three important fields indicating the date and time of the triggering moment: timestamps, recognized atomic actions, and the corresponding activity.
To test the performance under large-scale data, based on the real data, we generated numerous synthetic data having more varied patterns. Furthermore, data sets were randomly divided into 10 subsets, and such division was repeated 10 times. Each time, one subset was chosen as the test set and the other 9 subsets were put together to form a training set. This approach is called 10-fold cross validation.
The objective of tenfold cross validation is to evaluate the capacity about generalization, a well-known issue in machine learning [64]. Sometimes, a model could receive excellent evaluations on the data existing in the training set. However, once the test data have not been seen before, the classification result may break down. As an effective approach, cross validation could indicate the performance of built model when it is asked to make a prediction on the data that are not used to create the model. With its help, each pattern in the data set was removed at least once from the training sets.
In Table 4, statistical information and F-measure results using FCA-based inference engine are given out. Activities without multilevel inheritance relations have better recognition accuracies in the complex mode. This is because activities with multilevel inheritance relations are easier to be affected by unreliable data and recognized as one of their similar derivations.
4.2 CASAS smart apartment

Sensor layout of the CASAS intelligent apartment
CASAS smart apartment is designed and constructed by the Center for Advanced Studies in Adaptive Systems of Washington State University. Its benchmark data setsFootnote 3 represent sensor events collected in a smart apartment testbed [19]. In the experiment, we compare our results of Kyoto-3 interweaved ADL activities data set with the other methods in the literature. The CASAS data set contains the patterns of sequential and interleaved activities. As shown in Fig. 10, the whole apartment, including the bedrooms, a bathroom, a kitchen, and a living room, is deployed full of heterogeneous sensors to capture various environmental states.
Instead of using passive RFID tags, the CASAS laboratory directly uses motion sensors to track an occupant’ scopes of activities. The data in the sequences are the raw sensor events. Besides, the CASAS smart apartment also includes temperature sensors, light controllers, and a variety of item sensors detecting the usages and interactions of attached objects by individuals. Moreover, customer-built analog sensors monitor the usage of hot water, cold water, and stove burner. The phone usage is captured by Asterisk software, and the states of doors and cabinets are captured by contact switch sensors. Pressure sensors monitor the usage of key items such as medicine container, cooking pot, and phone book [30].

Recognition accuracy of different methods on the CASAS Kyoto-3 data set
There are 20 participants performing eight basic and instrumental activities in the apartment. First of all, each activity was performed separately, and then, these participants are asked to perform the entire set of eight activities again in any order, interweaving, and performing tasks in parallel if desired. Eight activities were involved: fill medication dispenser (\(ac_1\)), watch DVD (\(ac_2\)), water plants (\(ac_3\)), answer the phone (\(ac_4\)), prepare birthday card (\(ac_5\)), prepare soup (\(ac_6\)), clean (\(ac_7\)), and choose outfit (\(ac_8\)). Each sensor reading is tagged with the timestamps, sensor id, and its value.
In Table 5, we compared the recognition accuracy with different methods [19, 33]. In Fig. 11, our method achieves the highest accuracy (93.75%) among naive Bayes (66.08%) and HMM (71%) [33]. In Table 6, we compared the performance of our method with another two methods described in [19, 35] by F-measure. Complex behavioral patterns are classified as eight classes (activities). From these comparisons, we could see that our method has more better performance in each activity recognition.
For the time complexities in both training and test phases, we give out the statistical information in Table 7. The training phase includes sequential pattern extraction, formal lattice construction, and historical data accumulation. While handling with LIARA data set, we could see that the training and testing times are both very low. Compared with LIARA data set, CASAS data have much fewer training items, but the training time is much longer than the LIARA one. The reason is that the number of classes greatly affects the number of clusters. The augmentation of clusters also increases the complexity of searching in the Hasse diagram. For CASAS data set, every activity was performed by different actors and each activity having the same name must distribute different class labels as the variations of original activity.
5 Discussion
In this section, we introduce the advantages and disadvantages of our innovative methods from the obtained experimental results and the some discussions about reliability.
5.1 Preprocessing
The construction process of formal lattice depends on the correlations between objects and attributes. Normally, each data with categorical or binary value should be treated as an element in the set of attributes. However, sensor events with discrete values could not be well represented by binary relations. To avoid high dimensionality, discrete sensor values should be transformed into categorical ones by disjoint intervals.
Another optional processing is about the feature selection. In the training phase, if some captured data are not relevant to the belonging activities, or some attributes do not enable to efficiently differentiate activities, they should be pruned from the matrix describing correlations.
5.2 Reliability
The discussion about reliability surrounds in several parts. The first one is about the privacy. In the layout of LIARA smart home, the types of sensors used in the infrastructure are the non-intrusive ones, which do not contain private personal information. Unlike vision-based or video-based methods dealing with sequential and continuous images containing large number of private data, FCA-based inference engine only deals with discrete categorical or numerical values describing the states of environments. Thus, there is no controversy over privacy.
The second one is about the low volume requirement about the training data. FCA-based method does not need large amount of data for the construction of formal lattice. It could automatically self-adapt various patterns from a small indexed patterns. Redundant patterns will not bring significant improvement about accuracy, in some cases, it will lead overfitting and the useless features have to be pruned. Besides, Both LIARA and CASAS data sets adopted the intended strategy to label the experimental training data [65]. In the intended strategy, participants followed predefined instructions to do various activities. Observers could also clarify in case of uncertainty. For the test data set, both of them let the participant use another keyhole strategy to generate complex behavioral patterns. In the keyhole strategy, observers do not influence participants behaviors and manually annotate the complex sequences.
The third one is about the reusability. The inference engine contains three key components: the formal lattice to index useful itemsets, the accumulated matrix to record historical preferences, and weighted arrays, as well as matrices to evaluate causality and threat levels of events [5]. Most of them are independent, or loosely coupled with each other. For example, the matrices and arrays are user independent. The formal lattice could be reusable to provide various behavioral patterns of an activity. Furthermore, the accumulated matrix could be replaced without modify the architecture of the inference engine.
The fourth one is about the flexibility. As the common prerequisite of knowledge-driven methods [35], domain experts are essential to define and model knowledge base including domain of interest, relations among individuals, classes, and properties. In other words, the interventions from domain experts generally run through entire knowledge-based designs.
In contrast, the FCA-based inference engine depends on few prerequisite knowledge. From the FCA construction to the final recognition, there is no special requirement of understanding complicated rules or domain knowledge.
The last one is about the robustness. In software engineering, the robustness refers to the ability of a system to handle exceptions or erroneous inputs during execution. For a machine learning algorithm, it refers to the stable performance while handling data sets with noise. As mentioned in [35], when different patterns are partially captured or an occupant exhibited strange behaviors, the performance will normally fluctuate.
Our FCA-based method not only possess good generation capacity, but also is sensitive to detect various abnormal behavioral patterns. For each unseen pattern which is not in the training data set, but appears in the test data set, FCA-based inference engine will analyze its patterns and the similarity with existing cases, and then propose the candidate with the most similar patterns. According to the most common abnormal behaviors observed among people suffering cognitive impairment, in [5], we formally defined six cognitive errors and proposed a series of customer-built error detectors. These errors involve the majority of abnormal situations caused by the unreliable data. If the data loss happens due to less reliable sensors, most activities could be normally recognized and identified as unfinished ones. Even in the worse cases, FCA-based method could evaluate partial observed data, calculate the similarity, and classify the instance into the most possible activity cluster. As shown in the examples in Tables 1 and 2, repetitive data and few redundant ones have almost no affection to the final recognition results.
6 Conclusion
In this paper, we introduce a new activity inference engine to analyze sequential and temporal behavioral patterns to recognize complex ongoing ADLs in smart environments equipped with non-intrusive sensor networks. Complex ADLs involve the activities performed in the concurrent, sequential, or interleaved ways.
Compared with the conventional supervised data mining methods, our engine has strong generalization capacity and some reliable characteristics. The results tested in two different data sets demonstrate the excellent performance in behavioral pattern analysis.
In our future research, we intend to concentrate on the activity recognition among multiple occupants. In addition, more complex evaluation in the contextual and temporal parts will replace current RMSD assessment. A series of optimizations about formal lattice construction are also considered in the plan, for example, the incremental updating of new training data, weighted formal context instead of the binary one, and a more efficient pruning mechanism.
Notes
For example, in linguistics, each subject establishes a binary relation with its object (or predictive) by the (linking) verb.
The Supremum \(\{G,b\}\) in Fig. 7 is a special case, because all the activities in G have interactions with action b.
Available at http://ailab.wsu.edu/casas/datasets/.
References
United Nations (2015) World population ageing 2015. Department of economic and social affairs population division, New York, United Nations. http://www.un.org/en/development/desa/population/publications/pdf/ageing/WPA2015_Report.pdf. Accessed 23 Jan 2017
National Institute on Aging (2007) Why population aging matters: a global perspective. NIH publication. Bethesda, Maryland, USA. https://www.nia.nih.gov/sites/default/files/WPAM.pdf. Accessed 23 Jan 2017
World Health Organization (2011) Global health and aging. NIH publication, Bethesda, Maryland, USA. https://www.nia.nih.gov/sites/default/files/global_health_and_aging.pdf. Accessed 23 Jan 2017
National Institute on Aging (2016). Alzheimer’s Disease Fact Sheet, NIH Publication No. 16-AG-6423, Bethesda, Maryland, USA. https://www.nia.nih.gov/alzheimers/publication/alzheimers-disease-fact-sheet. Accessed 23 Jan 2017
Hao J, Gaboury S, Bouchard B (2016) Cognitive errors detection: Mining behavioral data stream of people with cognitive impairment. In: Pervasive technologies related to assistive environments. ACM, New York, pp 15:1–15:8
Cook DJ, Das SK (2007) How smart are our environments, an updated look at the state of the art. Pervasive Mob Comput 3(2):53–73
Rashidi P, Mihailidis A (2013) A survey on ambient-assisted living tools for older adults. IEEE J Biomed Health Inform 17(3):579–590
Sadri F (2011) Ambient intelligence: a survey. ACM Comput Surv (CSUR) 43(4):36
Acampora G, Cook DJ, Rashidi P, Vasilakos AV (2013) A survey on ambient intelligence in healthcare. Proc IEEE 101(12):2470–2494
Gubbi J, Buyya R, Marusic S, Palaniswami M (2013) Internet of things (iot): A vision, architectural elements, and future directions. Future Gener Comput Syst 29(7):1645–1660
Heerink M, Kröse B, Evers V, Wielinga B (2010) Assessing acceptance of assistive social agent technology by older adults: the almere model. Int J Soc Robot 2(4):361–375
Remagnino P, Foresti GL (2005) Ambient intelligence: a new multidisciplinary paradigm. IEEE Trans Syst Man Cybern Part A Syst Hum 35(1):1–6
Cook DJ, Augusto JC, Jakkula VR (2009) Ambient intelligence: technologies, applications, and opportunities. Pervasive Mob Comput 5(4):277–298
Perera C, Zaslavsky A, Christen P, Georgakopoulos D (2014) Context aware computing for the internet of things: a survey. IEEE Commun Surv Tutor 16(1):414–454
De Silva LC, Morikawa C, Petra IM (2012) State of the art of smart homes. Eng Appl Artif Intell 25(7):1313–1321
Chernbumroong S, Cang S, Atkins A, Hongnian Y (2013) Elderly activities recognition and classification for applications in assisted living. Expert Syst Appl 40(5):1662–1674
Youngblood GM, Cook DJ, Holder LB (2005) Managing adaptive versatile environments. Pervasive Mob Comput 1(4):373–403
Ryoo MS (2011) Human activity prediction: early recognition of ongoing activities from streaming videos. In: International Conference on Computer Vision, Barcelona, pp 1036–1043. doi:10.1109/ICCV.2011.6126349
Singla G, Cook DJ, Schmitter-Edgecombe M (2009) Tracking activities in complex settings using smart environment technologies. Int J Biosci Psychiatry Technol (IJBSPT) 1(1):25
Wilson C, Hargreaves T, Hauxwell-Baldwin R (2015) Smart homes and their users: a systematic analysis and key challenges. Pers Ubiquitous Comput 19(2):463–476
Chan M, Estève D, Escriba C, Campo E (2008) A review of smart homes - present state and future challenges. Comput Methods Progr Biomed 91(1):55–81
Chaaraoui AA, Padilla-López JR, Ferrández-Pastor FJ, Nieto-Hidalgo M, Flórez-Revuelta F (2014) A vision-based system for intelligent monitoring: human behaviour analysis and privacy by context. Sensors 14(5):8895–8925
Shannon CE (2001) A mathematical theory of communication. ACM SIGMOBILE Mob Comput Commun Rev 5(1):3–55
Chen L, Hoey J, Nugent CD, Cook DJ, Yu Z (2012) Sensor-based activity recognition. IEEE Trans Syst Man Cybern Part C (Appl Rev) 42(6):790–808
Bishop CM (2006) Pattern recognition and machine learning. Springer, New York
Al-Wattar M, Khusainov R, Azzi D, Chiverton J (2016) Activity recognition from video data using spatial and temporal features. In: 12th International Conference on Intelligent Environments (IE), London, pp 250–253. doi:10.1109/IE.2016.57
Cavallaro A (2007) Privacy in video surveillance [in the spotlight]. IEEE Signal Process Mag 2(24):168–166
Ruotsalainen M, Ala-Kleemola T, Visa A (2007) GAIS: a method for detecting interleaved sequential patterns from imperfect data. In: IEEE Symposium on Computational Intelligence and Data Mining, Honolulu, HI, pp 530–534. doi:10.1109/CIDM.2007.368920
Gu T, Wu Z, Tao X, Pung HK, Lu J (2009) epSICAR: an emerging patterns based approach to sequential, interleaved and concurrent activity recognition. In: IEEE international conference on pervasive computing and communications, Galveston, TX, pp. 1–9. doi:10.1109/PERCOM.2009.4912776
Rashidi P, Cook DJ, Holder LB, Schmitter-Edgecombe M (2011) Discovering activities to recognize and track in a smart environment. IEEE Trans Knowl Data Eng 23(4):527–539
Modayil J, Bai T, Kautz H (2008) Improving the recognition of interleaved activities. In: Proceedings of the 10th international conference on Ubiquitous computing (UbiComp ’08). ACM, New York, NY, USA, pp 40–43. doi:10.1145/1409635.1409641
Hu DH, Yang Q (2008) CIGAR: concurrent and interleaving goal and activity recognition. In: Cohn A (ed) Proceedings of the 23rd national conference on Artificial intelligence (AAAI’08), Vol 3, AAAI Press, pp 1363–1368
Singla G, Cook DJ (2009) Interleaved activity recognition for smart home residents. Intell Environ 9:145–152
Hallé S, Gaboury S, Bouchard B (2016) Towards user activity recognition through energy usage analysis and complex event processing. In: Proceedings of the 9th ACM international conference on PErvasive Technologies Related to Assistive Environments. (PETRA ’16). ACM, New York, NY, USA, Article 3, p 8. doi:10.1145/2910674.2910707
Riboni D, Sztyler T, Civitarese G, Stuckenschmidt H (2016) Unsupervised recognition of interleaved activities of daily living through ontological and probabilistic reasoning. In: Proceedings of the 2016 ACM International Joint Conference on Pervasive and Ubiquitous Computing. (UbiComp ’16). ACM, New York, NY, USA, pp 1–12. doi:10.1145/2971648.2971691
Roy P, Bouchard B, Bouzouane A, Giroux S (2009) A hybrid plan recognition model for Alzheimer’s patients: interleaved-erroneous dilemma. Web Intell Agent Syst Int J 7(4):375–397
Okeyo G, Chen L, Wang H (2014) Combining ontological and temporal formalisms for composite activity modelling and recognition in smart homes. Future Gener Comput Syst 39:29–43
Saguna S, Zaslavsky A, Chakraborty D (2011) Towards a robust concurrent and interleaved activity recognition of mobile users. In: IEEE 12th International Conference on Mobile Data Management, vol 1, Lulea, pp 297–298. doi:10.1109/MDM.2011.82
Bouchard B, Giroux S, Bouzouane A (2007) A keyhole plan recognition model for alzheimer’s patients: first results. Appl Artif Intell 21(7):623–658
Ye J, Dobson S (2010) Exploring semantics in activity recognition using context lattices. J Ambient Intell Smart Environ 2(4):389–407
Ye J, Stevenson G, Dobson S (2015) Kcar: a knowledge-driven approach for concurrent activity recognition. Pervasive Mob Comput 19:47–70
De Maio C, Fenza G, Loia V, Parente M (2016) Time aware knowledge extraction for microblog summarization on twitter. Inf Fusion 28:60–74
Loia V, Fenza G, De Maio C, Salerno S (2013) Hybrid methodologies to foster ontology-based knowledge management platform. In: IEEE symposium on Intelligent Agents (IA), Singapore, pp 36–43. doi:10.1109/IA.2013.6595187
De Maio C, Fenza G, Gallo M, Loia V, Senatore S (2014) Formal and relational concept analysis for fuzzy-based automatic semantic annotation. Appl Intell 40(1):154–177
De Maio C, Fenza G, Loia V, Senatore S (2012) Hierarchical web resources retrieval by exploiting fuzzy formal concept analysis. Inf Process Manag 48(3):399–418
Hao J, Bouchard B, Bouzouane A, Gaboury S (2016) Real-time activity prediction and recognition in smart homes by formal concept analysis. In: 12th International Conference on Intelligent Environments (IE), London, pp 103–110. doi:10.1109/IE.2016.24
Hao J, Bouzouane A, Bouchard B, Gaboury S (2017) Activity inference engine for real-time cognitive assistance in smart environments. J Ambient Intell Human Comput. doi:10.1007/s12652-017-0467-7
Reisberg B, Finkel S, Overall J, Schmidt-Gollas N, Kanowski S, Lehfeld H, Hulla F, Sclan SG, Wilms HU, Heininger K et al (2001) The Alzheimer’s disease activities of daily living international scale (ADL-IS). Int Psychogeriatr 13(2):163–181
Lawton MP, Brody EM (1970) Assessment of older people: self-maintaining and instrumental activities of daily living. Nurs Res 19(3):278
Chai X, Yang Q (2005) Multiple-goal recognition from low-level signals. In: Cohn A (ed) Proceedings of the 20th national conference on Artificial intelligence (AAAI’05), vol 1. AAAI Press, pp 3–8
Benmansour A, Bouchachia A, Feham M (2015) Multioccupant activity recognition in pervasive smart home environments. ACM Comput Surv 48(3):1–36
Kim E, Helal S, Cook D (2010) Human activity recognition and pattern discovery. IEEE Pervasive Comput 9(1):48–53
Aggarwal JK, Ryoo MS (2011) Human activity analysis: a review. ACM Comput Surv (CSUR) 43(3):16
Rialle V, Ollivet C, Guigui C, Hervé C (2008) What do family caregivers of Alzheimers disease patients desire in smart home technologies? Contrasted results of a wide survey. Methods Inf Med 47(1):63–69
Wray RE, Laird JE (2003) Variability in human behavior modeling for military simulations. In: Proceedings of the 2003 Conference on Behavior Representation in Modeling and Simulation. Scottsdale, AZ, USA
Van Kasteren TLM, Englebienne G, Kröse BJA (2011) Hierarchical activity recognition using automatically clustered actions. In: Keyson DV, Maher ML, Streitz N, Cheok A, Augusto JC (eds) Proceedings of the Second international conference on Ambient Intelligence (AmI’11), Springer-Verlag, Berlin, Heidelberg, pp 82–91. doi:10.1007/978-3-642-25167-2_9
Chien BC, Huang RS (2014) Activity recognition using discriminant sequence patterns in smart environments. In: Peng WC, et al (ed) Trends and Applications in Knowledge Discovery and Data Mining. PAKDD 2014. Lecture Notes in Computer Science, vol 8643, Springer, Cham
Ganter B, Wille R (1999) Formal concept analysis: mathematical foundations. Springer Science & Business Media, New York
Aggarwal CC, Reddy CK (2013) Data clustering: algorithms and applications. Chapman and Hall/CRC, London
Murphy KP (2012) Machine learning: a probabilistic perspective. MIT Press, Cambridge
Fawcett T (2006) An introduction to ROC analysis. Pattern Recognit Lett 27(8):861–874
Fortin-Simard D, Bilodeau JS, Bouchard K, Gaboury S, Bouchard B, Bouzouane A (2015) Exploiting passive RFID technology for activity recognition in smart homes. IEEE Intell Syst 30(4):7–15
Belley C, Gaboury S, Bouchard B, Bouzouane A (2015) Nonintrusive system for assistance and guidance in smart homes based on electrical devices identification. Expert Syst Appl 42(19):6552–6577
Aggarwal CC (2014) Data classification: algorithms and applications. CRC Press, Boca Raton
Roy PC, Bouchard B, Bouzouane A, Giroux S (2013) Ambient activity recognition in smart environments for cognitive assistance. Int J Robot Appl Technol (IJRAT) 1(1):29–56
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Hao, J., Bouzouane, A. & Gaboury, S. Complex behavioral pattern mining in non-intrusive sensor-based smart homes using an intelligent activity inference engine. J Reliable Intell Environ 3, 99–116 (2017). https://doi.org/10.1007/s40860-017-0041-2
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40860-017-0041-2