
Abstract
This paper is devoted to an inverse space-dependent source problem for space-fractional diffusion equation. Furthermore, we show that this problem is ill-posed in the sense of Hadamard, i.e., the solution (if it exists) does not depend continuously on the data. In addition, we propose a simplified generalized Tikhonov regularization method and prove the corresponding convergence estimates by using a priori regularization parameter choice rule and a posteriori parameter choice rule, respectively. Finally, numerical examples are carried to support the theoretical results and illustrate the effectiveness of the proposed method.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
In the past few years, fractional diffusion equations become a popular research topic for their wide applications, such as finance [1], physics [2], medicine [3], and so on. The direct problems of fractional diffusion equation have been extensively studied [4,5,6,7,8,9,10,11]. Nevertheless, in many application, initial information, boundary information, coefficient information, source term information might not be given and then we need to recover them by extra measured information which is able to yield some fractional diffusion inverse problems [12,13,14,15,16,17,18,19,20]. In recent years, inverse problems for fractional diffusion equation have become very active in various fields of sciences and engineering, such as biology [21, 22], physics [23, 24], chemistry [25], and hydrology [26].
To our knowledge, the researches on inverse source problems for space-fractional diffusion equation are still lack of wide attention. For inverse source problem for the space-fractional diffusion equation \(u_{t}(x,t)-~_{x}D^{\alpha }_{\theta }u(x,t)=F(x,t)\), we assume the source term \(F=F(x,t)\) can be split into f(x)q(t), if \(q(t)\ne 1\), we can see reference [27], if \(q(t)=1\), we can see references [28, 29]. In this work, we shall study an inverse source problem for the Riesz–Feller space-fractional diffusion equation as follows:
where the space-fractional derivative \(_{x}D^{\alpha }_{\theta }\) is the Riesz–Feller fractional derivative of order \(\alpha (0<\alpha <2)\) and skewness \(\theta (|\theta |\le \min \{\alpha ,2-\alpha \},\theta \ne \pm 1)\) which is defined by the Fourier transform in [30],
where
From [30], the Riesz–Feller fractional derivative can be written as
where \(\Gamma (\cdot )\) is a gamma function. The function f(x) denotes the source term. Our aim is to identify f(x) from the additional data \(u(x,1)=g(x)\). Since the data g(x) is based on physical observation, there must exist measurement errors, and we assume the measured data \(g^{\delta }\in L^{2}(\mathbb {R})\), which satisfies
where \(\Vert \cdot \Vert \) denotes \(L^{2}\)-norm and the constant \(\delta >0\) is a noise level.
Our main purposes are as follows. By using the simplified generalized Tikhonov regularization method, we give the convergence estimates under a priori and a posteriori regularization parameter choice rules, respectively. Next, the numerical results are based on a posteriori parameter choice rule which is independent of a priori bound of the exact solution is more useful in practical issues.
Finally, we list the content of the paper. In Sect. 2, we will analyze the ill-posedness of inverse source problem (1.1). In Sect. 3, we propose the simplified generalized Tikhonov regularization method and prove convergence estimates under a priori parameter choice rule and a posteriori parameter choice rule. In Sect. 4, we give two numerical examples to show the effectiveness of the proposed method. Section 5 puts an end to this paper with a brief conclusion.
2 Ill-Posedness of Identifying an Unknown Source
In order to apply the Fourier transform, we assume all the functions involving x variable belong to \(L^{2}(\mathbb {R})\). Here, and in the following sections, \(\Vert \cdot \Vert \) denotes the \(L^{2}\)-norm,
Let
be the Fourier transform of the function \(f(x)\in L^{2}(\mathbb {R})\), the solution of problem (1.1) is obtained in the frequency domain
or equivalently,
Note that \(\psi ^{\theta }_{\alpha }(\xi ) (\theta \le \min \{\alpha ,2-\alpha \},\theta \ne 1)\) has a positive real part \(|\xi |^{\alpha }\). It can be seen that \(|\xi |^{\alpha }\rightarrow \infty \) as \(|\xi |\rightarrow \infty \), the small error in the high-frequency components will be amplified. Therefore, inverse source problem (1.1) is ill-posed. It is impossible to solve the problem (1.1) by using classical methods, the regularization methods are needed. Before doing that, we need to impose a priori bound on the given data
where \(M>0\) is a constant, and \(\Vert \cdot \Vert _{H^{p,2}}\) denotes the norm in the Sobolev space \(H^{p,2}(\mathbb {R})\) defined by
3 Simplified Generalized Tikhonov Regularization Method and Convergence Estimates
In this section, we solve problem (1.1) by using generalized Tikhonov regularization method that minimizes the quadratic functional
where \(\mu >0\) is the regularization parameter. Let \(\widehat{f}_{\mu }^{\delta }(\cdot )\) be the solution of the above problem, the unique solution of the minimization problem (3.1) is equal to the following Euler equation:
The generalized Tikhonov regularization solution \(\widehat{f}^{\delta }_{\mu }(\xi )\) in frequency domain can be given
or equivalently,
Now, we use the new filter \(\frac{1}{1+\mu (1+|\xi |^{2})^{p+2}}\) to replace the original filter \(\frac{1}{1+\mu (1+|\xi |^{2})^{p}\bigg (\frac{\psi ^{\theta }_{\alpha }(\xi )}{1-e^{-\psi ^{\theta }_{\alpha }(\xi )}}\bigg )^{2}}\). Thus, we get a simplified generalized Tikhonov regularization solution of (3.4), that is,
or equivalently,
In the following subsection, the convergence estimates will be given under a priori regularization parameter choice and a posteriori regularization parameter choice.
3.1 A Priori Choice Rule
In order to obtain our main results, we first give some important lemmas.
Lemma 3.1
[28] If \(x>1\), the following inequality holds
Lemma 3.2
[29] If \(\xi \in \mathbb {R}\), the following inequality holds
Lemma 3.3
If \(\xi \in \mathbb {R}\), and \(0<\alpha <2\), the following inequality holds
Proof
Let
Let \(s=|\xi |^{\alpha }\cos (\frac{\theta \pi }{2})\), and we know \(|\xi |^{\alpha }=\frac{s}{\cos (\frac{\theta \pi }{2})}\) and \(|\xi |=\big (\frac{s}{\cos (\frac{\theta \pi }{2})}\big )^{\frac{1}{\alpha }}\), then \(A(\xi )\) can be written as
We need to estimate the function B(s) in three cases.
Case 1. If \(0\le s\le 1\), we obtain
Case 2. If \(-1\le s< 0\), we have
Case 3. If \(|s|> 1\), we get
Let
By elementary calculation, we can obtain that \(s^{*}=(\frac{\alpha }{(2p+4-\alpha )\mu })^{\frac{\alpha }{2(p+2)}}\cos (\frac{\theta \pi }{2})\) such that \(\frac{d\eta (s)}{ds}(s^{*})=0\). If \(s>s^{*}\), then \(\frac{d\eta (s)}{ds}<0\); If \(s<s^{*}\), then \(\frac{d\eta (s)}{ds}>0\), and then \(\eta (s)\) attains the maximum at \(s^{*}\), i.e.,
Therefore, we know
Finally, combining (3.10), (3.11), (3.12), (3.13) and (3.17), we have
\(\square \)
Lemma 3.4
If \(\xi \in \mathbb {R}\), the following inequality holds
Proof
Let
Let \(z=1+|\xi |^{2}\), then \(D(\xi )\) can be written as
By elementary calculation, we can obtain that \(z^{*}=(\frac{4+p}{\mu p})^{\frac{1}{p+2}}\) such that \(\frac{d\phi (z)}{dz}(z^{*})=0\). If \(z>z^{*}\), then \(\frac{d\phi (z)}{dz}<0\). If \(z<z^{*}\), then \(\frac{d\phi (z)}{dz}>0\), and hence, \(\phi (z)\) attains its maximum at \(z^{*}\), i.e.,
\(\square \)
Theorem 3.5
Suppose that \(f_{\mu }^{\delta }(x)\) is the regularization solution for problem (1.1) with the noisy data \(g^{\delta }(x)\), and \(f_{\mu }(x)\) is the simplified generalized Tikhonov regularization solution for problem (1.1) with the exact data g(x). Assumptions (1.4) and (2.4) are satisfied, then we obtain
Proof
By using the Parseval equality, and Lemmas 3.2 and 3.3, we have
\(\square \)
Theorem 3.6
Suppose that \(f_{\mu }(x)\) is the simplified generalized Tikhonov regularization solution for problem (1.1) with the exact data g(x) and f(x) is the exact solution of problem (1.1) with the exact data g(x). Assumptions (1.4) and (2.4) are satisfied, then we have
Proof
By using the Parseval equality, and Lemma 3.4, we have
\(\square \)
Theorem 3.7
Suppose that \(f_{\mu }^{\delta }(x)\) is the regularization solution for problem (1.1) with the noisy data \(g^{\delta }(x)\), and \(f_{\mu }(x)\) is the exact solution for problem (1.1) with the exact data g(x). Assumptions (1.4) and (2.4) are satisfied. If we choose
then we obtain the following convergence estimate
Proof
According to the Parseval identity and triangle inequality, we get
Then, using Theorems 3.5 and 3.6, the proof of Theorem 3.7 is completed. \(\square \)
3.2 A Posteriori Choice Rule
In this subsection, we prove the convergence estimate between the exact solution and the regularized solution by using a posteriori choice rule for a regularization parameter, i.e., Morozov’s discrepancy principle.
According to the Morozov’s discrepancy principle [31], we choose the regularization parameter \(\mu \) as the solution of the following equation
Here, \(\tau >1\) is a constant. To establish the main result, we need the following lemmas and remark.
Lemma 3.8
Let \(\rho (\mu ):=\Vert \frac{1}{1+\mu (1+|\xi |^{2})^{p+2}}\widehat{g}^{\delta }(\xi )-\widehat{g}^{\delta }(\xi )\Vert \), the following results hold
(a) \(\rho (\mu )\) is a continuous function;
(b) \(\lim _{\mu \rightarrow 0}\rho (\mu )=0;\)
(c) \(\lim _{\mu \rightarrow +\infty }\rho (\mu )=\Vert \widehat{g}^{\delta }\Vert ;\)
(d) \(\rho (\mu )\) is a strictly increasing function over \((0,+\infty )\).
The proof of Lemma 3.8 is very easy and we omit it here.
Remark 3.9
To establish the existence and uniqueness of the solution for Eq. (3.30), we always suppose \(0<\tau \delta <\Vert g^{\delta }\Vert \).
Lemma 3.10
If \(\mu \) is the solution of Eq. (3.30), then the following inequality holds
Proof
Using the triangle inequality, we obtain
\(\square \)
Lemma 3.11
If \(\mu \) is the solution of Eq. (3.30), then the following inequality holds
Proof
Using the triangle inequality, the formula (3.30) and the condition (2.4), we have
Let
We need to estimate the function \(G(\xi )\) in three cases.
Case 1. If \(\xi =0\), then we have
Case 2. If \(|\xi |\le 1\) and \(\xi \ne 0\), then we get
Case 3. If \(|\xi |>1\), then we obtain
Let \(m=\mu |\xi |^{2(p+2)}\), then \(|\xi |^{(p+\alpha )}=(\frac{m}{\mu })^{\frac{p+\alpha }{2(p+2)}}\), and we know \(\frac{p+4-\alpha }{2(p+2)}<1\), then
Combining (3.34), (3.35), (3.36) and (3.37), we can get
According to the condition \(0<\mu<1, 0<\alpha <2\), we have
So, we know
Therefore, combining (3.33) and (3.39), we can obtain
By elementary calculation, the following inequality holds
\(\square \)
Lemma 3.12
If \(0<\alpha <2\), \(p>0\), then the following inequality holds
Proof
Let
and \(s=|\xi |^{\alpha }\cos (\frac{\theta \pi }{2})\), and we know \(|\xi |^{\alpha }=\frac{s}{\cos (\frac{\theta \pi }{2})}\) and \(|\xi |=(\frac{s}{\cos (\frac{\theta \pi }{2})})^{\frac{1}{\alpha }}\), then \(H(\xi )\) can be written as
If \(0\le s\le 1\), we have
If \(-1\le s <0\), we get
If \(|s|>1\), we obtain
Hence, the proof of Lemma 3.12 is completed. \(\square \)
Lemma 3.13
If \(0<\alpha <2\), \(p>0\), then the following inequality holds
Here, \(C=2^{\frac{p+\alpha }{\alpha }}(\frac{1}{\cos (\frac{\theta \pi }{2})})^{\frac{p}{\alpha }}\frac{p+\alpha -4}{2p+2\alpha -4} (\frac{p+\alpha }{p+4-\alpha })^{\frac{p+\alpha }{2p+4}}\).
Proof
Let
and \(s=|\xi |^{\alpha }\cos (\frac{\theta \pi }{2})\), and we know \(|\xi |^{\alpha }=\frac{s}{\cos (\frac{\theta \pi }{2})}\) and \(|\xi |=(\frac{s}{\cos (\frac{\theta \pi }{2})})^{\frac{1}{\alpha }}\), then \(L(\xi )\) can be written as
If \(0\le s\le 1\), we have
If \(-1\le s< 0\), we have
If \(|s|>1\), we obtain
Let
By elementary calculation, we can obtain that \(s^{*}=\cos (\frac{\theta \pi }{2})(\frac{p+\alpha }{p+4-\alpha })^{\frac{\alpha }{2p+4}} (\frac{1}{\mu })^{\frac{\alpha }{2p+4}}\), such that \(\frac{d N(s)}{ds}(s^{*})=0\). If \(s>s^{*}\), then \(\frac{d N(s)}{ds}<0\). If \(s<s^{*}\), then \(\frac{d N(s)}{ds}>0\), and hence, N(s) attains its maximum at \(s^{*}\), i.e.,
Here, \(C=2^{\frac{p+\alpha }{\alpha }}\frac{p+\alpha -4}{2p+4} (\frac{p+\alpha }{p+4-\alpha })^{\frac{p+\alpha }{2p+4}}\). Hence, combining (3.48), (3.49) and (3.53), the proof of Lemma 3.13 is completed. \(\square \)
Theorem 3.14
Suppose that \(f_{\mu }^{\delta }(x)\) is the regularization solution for problem (1.1) with the noisy data \(g^{\delta }(x)\), and \(f_{\mu }\) is the exact solution for problem (1.1) with the exact data g(x). Assumptions (1.4) and (2.4) are satisfied. Then, we obtain the following convergence estimate
Here, \(D=\left( \left( \frac{e}{\cos (\frac{\theta \pi }{2})}\right) ^{\frac{p+\alpha }{\alpha }}\delta M^{-1}+C\frac{e 2^{(p+2)}}{\tau -1} +\left( \frac{e}{\cos (\frac{\theta \pi }{2})}\right) ^{\frac{p}{\alpha }}+2^{\frac{p}{\alpha }}\right) ^{\frac{\alpha }{p+\alpha }}(\tau +1)^{\frac{p}{p+\alpha }}.\)
Proof
According to the Parseval identity and the Hölder inequality, we have
Firstly, we estimate \(I_{1}\),
From Lemmas 3.12 and 3.13, we know
and using Lemma 3.11, we can get
For \(I_{2}\), using Lemma 3.10, we have
Therefore, combining (3.55), (3.58), and (3.59), we obtain
\(\square \)
4 Numerical Experiments
In this section, we present some numerical results for two examples for showing the effectiveness of the proposed method.
The numerical examples are constructed in the following way: First, we select the exact solution f(x) and obtain the exact data function g(x) through solving the forward problem. Then, we add a normally distributed perturbation to each data function and obtain vectors \(g^{\delta }(x)\), i.e.,
where
Here, the function “\(\mathrm{{randn(\cdot )}}\)” generates arrays of random numbers whose elements are normally distributed with mean 0, variance \(\sigma ^{2}=1\) and standard deviation \(\sigma =1\), “\(\mathrm{{randn(size(g))}}\)” returns array of random entries that is the same size as g, the magnitude \(\epsilon \) indicates a relative noise level. Here, the total noise \(\delta \) can be measured in the sense of the root mean square error according to
Finally, we obtain the regularization solution through solving an inverse problem, and the regularized solution is compared with the exact solution.
In our experiments, we only consider the regularization parameter \(\mu \) is chosen by (3.30) with \(\tau =1.1\) under a posteriori regularization parameter choice rule, which is independent of a priori bound of the exact solution is more useful in practical issues.
Example 4.1
Consider a piecewise smooth source:
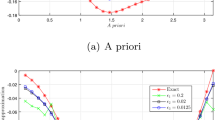
In Fig. 1, the numerical results for simplified generalized Tikhonov regularization method under a posteriori parameter choice rule for various noise levels \(\epsilon =0.001, 0.01\) in case of \(\alpha =0.5,\theta =0.1, p=2\) with Example 4.1 are shown.
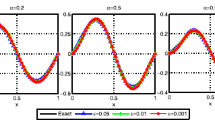
In Fig. 2, the numerical results for simplified generalized Tikhonov regularization method under a posteriori parameter choice rule for various noise levels \(\alpha =1.4, 0.4\) in case of \(\theta =0.1, \epsilon =0.001, p=2\) with Example 4.1 are shown.

The comparison of the numerical effects between the exact solution and its approximation solution, \(\alpha =0.5, \theta =0.1, p=2\): \(\epsilon =0.001, 0.01\) with Example 4.1

The comparison of the numerical effects between the exact solution and its approximation solution, \(\theta =0.1, \epsilon =0.001, p=2\): \(\alpha =1.4, 0.4\) with Example 4.1
Example 4.2
Consider the following discontinuous source:
In Fig. 3, the numerical results for simplified generalized Tikhonov regularization method under a posteriori parameter choice rule for various noise levels \(\epsilon =0.001, 0.01\) in case of \(\alpha =0.5,\theta =0.1, p=2\) with Example 4.2 are shown.
In Fig. 4, the numerical results for simplified generalized Tikhonov regularization method under a posteriori parameter choice rule for various noise levels \(\alpha =1.4, 0.4\) in case of \(\theta =0.1, \epsilon =0.001, p=2\) with Example 4.2 are shown.

The comparison of the numerical effects between the exact solution and its approximation solution, \(\alpha =0.5, \theta =0.1, p=2\): \(\epsilon =0.001, 0.01\) with Example 4.2

The comparison of the numerical effects between the exact solution and its approximation solution, \(\theta =0.1, \epsilon =0.001, p=2\): \(\alpha =1.4, 0.4\) with Example 4.2
Figures 1 and 3 show that the smaller the parameter \(\epsilon \) is, the better the computed approximation is, and Figs. 2 and 4 show the smaller the parameter \(\alpha \) is, the better the computed approximation is. Moreover, Figs. 1, 2, 3, and 4 also show that the posteriori parameter choice rule works well. Finally, these tests illustrate that the proposed method is not only effective for the continuous example, but it works well for the discontinuous example.
5 Conclusion
In this paper, we provide a simplified generalized Tikhonov regularization method to solve an inverse space-dependent source of space-fractional diffusion equation. The convergence estimates are proved based on a priori and a posteriori parameter choice rules, respectively. From Theorems 3.7 and 3.14, we know that the convergence order of the proposed method under a posteriori parameter choice rule is better than one of the proposed method under a priori parameter choice rule. Numerical examples show that the proposed method is effective and stable.
References
Sabatelle, L., Keating, S., Dubley, J., Richmond, P.: Waiting time distributions in financial markets. Eur. Phys. J. B 24, 273–275 (2002)
Metzler, R., Klafter, J.: The restaurant at the end of the random walks: recent developments in the description of anomalous transport by fractional dynamics. J. Phys. A Math. Gen. 37, R161–R208 (2004)
Hall, M.G., Barrick, T.R.: From diffusion-weighted MRI to anomalous diffusion imaging. Magn. Reson. Med. 59, 447–455 (2008)
Jiang, H., Liu, F., Turner, I., Burrage, K.: Analytical solutions for the multi-term time-fractional diffusion-wave/diffusion equations in a finite domain. Comput. Math. Appl. 64, 3377–3388 (2012)
Jin, B., Lazarov, R., Zhou, Z.: Error estimates for a semidiscrete finite element method for fractional order parabolic equations. SIAM J. Numer. Anal. 51, 445–466 (2013)
Li, Z., Liu, Y., Yamamoto, M.: Initial-boundary value problems for multi-term time-fractional diffusion equations with positive constant coefficient. Appl. Math. Comput. 257, 381–397 (2015)
Luchko, Y.: Maximum principle for the generalized time-fractional diffusion equation. J. Math. Anal. Appl. 351, 218–223 (2009)
Murio, D.A.: Implicit finite difference approximation for time fractional diffusion equations. Comput. Math. Appl. 56, 1138–1145 (2008)
Sakamoto, K., Yamamoto, M.: Initial value/boundary value problems for fractional diffusion-wave equations and applications to some inverse problems. J. Math. Anal. Appl. 382, 426–447 (2011)
Cheng, X., Li, Z.Y., Yamamoto, M.: Asymptotic behavior of solutions to space-time fractional diffusion-reaction equations. Math. Methods Appl. Sci. 40, 1019–1031 (2017). https://doi.org/10.1002/mma.4033
Kemppainen, J., Siljander, J., Zacher, R.: Representation of solutions and large-time behavior for fully nonlocal diffusion equations. J. Differ. Equ. 263, 149–201 (2017). https://doi.org/10.1016/j.jde.2017.02.030
Cheng, J., Nakagawa, J., Yamamoto, M.: Uniqueness in an inverse problem for a one-dimensional fractional diffusion equation. Inverse Prob. 25, 115002 (2009)
Liu, J.J., Mamamoto, Y.: A backward problem for the time-fractional diffusion equation. Appl. Anal. 89, 1769–1788 (2010)
Zheng, G.H., Wei, T.: Two regularization methods for solving a Riesz–Feller space-fractional backward diffusion problem. Inverse Prob. 26, 115017 (2020)
Zhang, Y., Xu, X.: Inverse source problem for a fractional diffusion equation. Inverse Prob. 27, 035010 (2011)
Xiong, X.T., Zhou, Q., Hon, Y.C.: An inverse problem for fractional diffusion equation in 2-dimensional case: stability analysis and regularization. J. Math. Anal. Appl. 393, 185–199 (2012)
Zhao, J.J., Liu, S.S., Liu, T.: An inverse problem for space-fractional backward diffusion problem. Math. Methods Appl. Sci. 37, 1147–1158 (2014)
Liu, S.S., Feng, L.X.: A modified kernel method for a time-fractional inverse diffusion problem. Adv. Differ. Equ. 342, 1–11 (2015)
Liu, S.S., Feng, L.X.: A posteriori regularization parameter choice rule for a modified kernel method for a time-fractional inverse diffusion problem. J. Comput. Appl. Math. 353, 355–366 (2019)
Liu, S.S., Feng, L.X.: Filter regularization method for a time-fractional inverse advection-dispersion problem. Adv. Differ. Equ. 222, 1–14 (2019)
Liu, F., Burrage, K.: Novel techniques in parameter estimation for fractional dynamical models arising from biological systems. Comput. Math. Appl. 62, 822–833 (2011)
Yu, B., Jiang, X.Y., Wang, C.: Numerical algorithms to estimate relaxation parameters and Caputo fractional derivative for a fractional thermal wave model in spherical composite medium. Appl. Math. Comput. 274, 106–118 (2016)
Metzler, R., Klafter, J.: The random walk’s guide to anomalous diffusion: a fractional dynamics approach. Phys. Rep. 339, 1–77 (2000)
Fan, W., Jiang, X., Qi, H.: Parameter estimation for the generalized fractional element network Zener model based on the Bayesian method. Phys. A 427, 40–49 (2015)
Yuste, S.B., Acedo, L., Lindenberg, K.: Reaction front in an \(a+b\rightarrow c\) reaction-subdiffusion process. Phys. Rev. E 69, 036126 (2004)
Liu, F., Anh, V., Turner, I.: Numerical solution of the space fractional Fokker–Planck equation. J. Comput. Appl. Math. 166, 209–219 (2004)
Trong, D.D., Hai, D.N.D., Minh, N.D.: Optimal regularization for an unknown source of space-fractional diffusion equation. Appl. Math. Comput. 349, 184–206 (2019)
Yang, F., Fu, C.L., Li, X.X.: Identifying an unknown source in space-fractional diffusion equation. Acta Math. Sci. 34B, 1012–1024 (2014)
Li, X.X., Lei, J.L., Yang, F.: An a posteriori Fourier regularization method for identifying the unknown source of the space-fractional diffusion equation. J. Inequal. Appl. 434, 1–13 (2014)
Mainardi, F., Luchko, Y., Pagnini, G.: The fundamental solution of the space-time fractional diffusion equation. Fract. Calculus Appl. Anal. 4, 153–192 (2001)
Kirsch, A.: An Introduction to the Mathematical Theory of Inverse Problem. Springer, New York (1999)
Acknowledgements
S. Liu was supported by Fundamental Research Funds of the Central Universities (N182304024) and Research Project of Higher School Science and Technology in Hebei Province (QN2021305). L. Feng was supported by National Natural Science Foundation of China (11871198). G. Zhang was supported by the National Natural Science Foundation of China (11701074) and Fundamental Research Funds of the Central Universities (N2023033).
Author information
Authors and Affiliations
Corresponding author
Additional information
Communicated by Rosihan M. Ali.
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Liu, S., Feng, L. & Zhang, G. An Inverse Source Problem of Space-Fractional Diffusion Equation. Bull. Malays. Math. Sci. Soc. 44, 4405–4424 (2021). https://doi.org/10.1007/s40840-021-01174-z
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40840-021-01174-z
Keywords
- Space-fractional diffusion equation
- Inverse source problem
- Simplified generalized Tikhonov regularization method
- A priori parameter choice
- A posteriori parameter choice