
Abstract
In this article, the solution for Volterra–Fredholm integral equation (V–FIE) is investigated numerically by using the generalized Lucas polynomials. We approximate the solution of this equation as a base of the collocation method. This method depends on the operational matrices of these polynomials. These expansions and the properties of the generalized Lucas polynomials help us to solve the V–FIE. First, we approximate the unknown function and its integration in terms of the generalized Lucas polynomials with unknown coefficients. Then, by substituting these approximations into the equation and using the properties of these polynomials together with the collocation method, the problem is reduced to a system of algebraic equations in the expansion coefficients of the solution, which can be simply solved. An error estimate and convergence of the numerical solution for the generalized Lucas expansion are proved extensively. Eventually, some examples are included and compared with other methods to show the accuracy and validity of the proposed method.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
One of the most important methods that evaluate the numerical solutions of the differential equations is the spectral method. We express the solution as the expansion of polynomials. Numerical schemes are used to solve and investigate different kinds of fractional differential equations such as [1,2,3] using Jacobi operational matrix for solving linear multi-term fractional differential equations, the space-fractional order diffusion equation and fractional reaction-subdiffusion equation with variable order. [4] solutions of third and fifth-order differential equations by using Petrov-Galerkin methods, [5] solutions of fractional differential equations by using shifted Jacobi spectral approximations. The numerical solution of the nonlinear time-fractional telegraph equation using the neutron transport process [6]. Numerical evaluation of the time-fractional Klein–Kramers model is obtained by incorporating the subdiffusive mechanisms [7]. Solving the modified time-fractional diffusion equation using a meshless method [8]. The most used spectral methods are the Galerkin, Collocation, and Tau methods: Numerical solution of fractional reaction–subdiffusion problem using an improved localized radial basis-pseudospectral collocation method [9]. [10, 11] numerical solutions of fractional Telegraph equation by using Legendre-Galerkin algorithm and Legendre Wavelets spectral tau algorithm. [12] solution of fractional rheological models and Newell–Whitehead–Segel equations using shifted Legendre collocation method. [13] numerical solution of differential eigenvalue problems by using tau method. Solving fractional advection-dispersion problems using Chebyshev method and tau-Jacobi algorithm [14, 15]. [16] numerical solutions of time-fractional Klein–Gordon equations by clique polynomials. [17,18,19] using generalized Lucas (tau and collocation) method for solving multi-term fractional differential equations and fractional pantograph differential equation. [20] numerical solutions for coupled system of fractional differential equations using generalized Fibonacci tau method.
Recently, the approximate solutions of the integral equations are evaluated by different methods. These methods help to solve different kinds of integral equations with small error and a small number of unknowns: numerical solution of nonlinear fractional integro-differential equations with variable order derivative using the Bernstein polynomials and shifted Legendre polynomials [21,22,23]. Specially, solutions of Volterra–Fredholm integral equations: Solving nonlinear mixed Volterra–Fredholm integral equations using variational iteration method [24]. [25, 26] solutions using Taylor collocation and Taylor polynomial methods, [27] solutions using Legendre collocation method. Solutions using Chebyshev method and second kind Chebyshev [28,29,30] solutions using Lagrange collocation method. [31] solutions by continuous-time and discrete-time spline collocation methods. [32] solving using Hybrid function method, [33] using the Adomian decomposition method. In this article, we numerically study the Volterra–Fredholm integral equations and apply the operational matrices based on the generalized Lucas polynomials. We compared the obtained results with the Taylor collocation (TC) method [25], the Taylor polynomial (TP) method [26], and the Lagrange collocation (LC) method [30]. The best of our work is the first to use the generalized Lucas collocation method for solving Volterra–Fredholm integral equation. This method is certainly will verify high accurate results and fortunately takes shorter times.
Consider the Volterra–Fredholm integral equation [27]
where V(y) is an unknown function. L(y), N(y), \(\gamma (y),\) and h(y) are known and defined on the interval \(\left[ 0,\ell \right] , 0\le \gamma (y)<\infty \). \(\beta _{1}(y,t)\) and \(\beta _{2}(y,t)\) are known functions on \(\left[ 0,\ell \right] \times \left[ 0,\ell \right] .\) \(\alpha _{1}\) and \( \alpha _{2}\) are real constants.
The organization of this paper is as follows: Sect. 1 contains a brief history of the subject of our work. In Sect. 2, some properties of the generalized Lucas polynomials, which will be used in the following sections, are introduced. In Sect. 3, we describe the algorithm of this method using the generalized Lucas polynomials for solving Volterra–Fredholm integral equation. In Sect. 4, the convergence and error analysis are examined. We give some examples and compared them with other techniques in Sect. 5. In the last, Sect. 6 we introduce some conclusions.
Properties and Used Formulas
The main aim of this section is to recall some important properties and formulas of the generalized Lucas polynomials which will be used further [17, 34,35,36].
The generalized Lucas polynomials \(\left\{ \varphi _{m}^{\nu _{1},\nu _{2}}\left( y\right) \right\} _{m\ge 0}\)( \(\nu _{1}\) and \(\nu _{2}\) are non zero real numbers). Which has the recurrence relation:
With initial values: \(\varphi _{0}^{\nu _{1},\nu _{2}}\left( y\right) =2, ~\varphi _{1}^{\nu _{1},\nu _{2}}\left( y\right) =\nu _{1}y.\)
\(\varphi _{m}^{\nu _{1},\nu _{2}}\left( y\right) \) has the Binet’s form:
Assume that we can expand the function V(y) in terms of generalized Lucas polynomials:
Let the approximation of V(y) be
where
and the coefficients
must be determined.
The Algorithm of the Method
In this section, we use the generalized Lucas polynomials to approximate the solution of Eq. (1). Suppose that \(0\le \gamma (y)<\ell .\) From the approximation (5), we have
From Eqs. (5) and (8) then Eq. (1) is rewritten as:
Let
Therefore we can write Eq. (9) in the form:
Where Eq. (11) has \(K+1\) roots. So we have a system of equations
where
The matrix form of equation (12) is given by
where
and
The unknown constants can be determined by the following equation:
Convergence and Error Analysis
In this section, we investigate the convergence and error analysis of generalized Lucas expansion of V–FIE. The following theorems are satisfied:
Theorem 1
If V(y) is defined on [0, 1] and \(\left| V^{(i)}(0)\right| \le \ell ^{i},\) \(i\ge 0\) where \(\ell \) is a positive constant and if V(y) has the expansion:
Then:
-
1)
\(~\left| e_{m}\right| \le \frac{ \left| \nu _{1}\right| ^{-m}\ell ^{m}\cosh \left( 2\left| \nu _{1}\right| ^{-1}\nu _{2}^{\frac{1}{2}}\ell \right) }{m~!},\)
-
2)
The series converges absolutely.
Proof
See [17] \(\square \)
If \(\varepsilon _{K}(y)=\left| V(y)-V_{K}(y)\right| \) then we have the following truncation error:
Theorem 2
Let V(y) satisfy the assumptions stated in theorem (1). Moreover \( \varepsilon _{K}(y)=\sum \limits _{m=K+1}^{\infty }e_{m}\ \varphi _{m}^{\nu _{1},\nu _{2}}\left( y\right) \) be the truncation error so:
Proof
See [17] \(\square \)
Now, we give an estimated value for the error of the numerical solution of Eq. (1) obtained by the proposed method.
Theorem 3
Let \(\ \varepsilon _{K}^{\gamma }(y)=\varepsilon _{K}(\gamma (y)),\) \( \epsilon _{K}=\underset{0\le y\le \ell }{~\max }\varepsilon _{K}(y)\) and \(\ \epsilon _{K}^{\gamma }=\underset{0\le y\le \ell }{~\max } \varepsilon _{K}^{\gamma }(y)\), and
let
and if \(\left| N(y)\right| \le N_{1},\left| L(y)\right| \le L_{1},\left| \beta _{1}(y,t)\right| \le \Psi _{1},\left| \beta _{2}(y,t)\right| \le \Psi _{2}\) and \(\left| \gamma (y)\right| \le \lambda .\) Where \(N_{1},L_{1},\Psi _{1},\Psi _{2}\) and \( \lambda \) are positive constants. Then we have the following global error estimate:
where
Proof
From Eq. (1), we have
So
From the assumptions of the theorem, we have
Then we obtain
From Theorem (2) , so the proof is completed. \(\square \)
Numerical Examples
In this section, we introduce a numerical approach to solve Eq. (1) using the generalized Lucas collocation (GLC) method and compare our results within [25, 26, 30]. Numerical examples are presented to show the validity, effectiveness, and accuracy of the method.
Example 1
Suppose that the following V–FIE [27]
The exact solution of this equation is \(V(y)=y^{2}\), where
Table 1 shows that the absolute error which obtained by the GLC method is better than that obtained by the Taylor collocation (TC) method [25], the Taylor polynomial (TP) method [26], and the Lagrange collocation (LC) method [30]. The last two columns clarify the time used for the running program (CPU time) and the difference between two consecutive errors (\(C_{K}\)).
CPU time | \(C_{K}\) |
|---|---|
6.546 | \(2\times 10^{-16}\) |
17.22 | \(1\times 1^{-16}\) |
52.642 | \(9.2\times 10^{-15}\) |
Example 2
Suppose that the following V–FIE [27]
The exact solution of this equation is \(V(y)=\sin y\), where
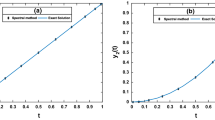
In Table 2, there is a comparison between the absolute errors of the present method with the Taylor collocation (TC) method [25], the Taylor polynomial (TP) method [26], and the Lagrange collocation (LC) method [30]. In Figure 1 we illustrate the results of the present method at \(K=2,5,8\) and 9. The Figure shows that the convergence is exponential and the errors are better when the values of K are large.
CPU time | \(C_{K}\) |
|---|---|
3.985 | \(7.4\times 10^{-2}\) |
32.797 | \(1.6\times 1^{-4}\) |
69.436 | \(2.1\times 10^{-8}\) |
82.406 | \(4.24\times 10^{-8}\) |

Graph of the error at K=2, 5, 8 and 9
Example 3
Suppose that the following V–FIE
The exact solution of this equation is \(V(y)=y^{\frac{1}{2}}\), where
Table 3 lists The numerical results obtained by the proposed method for \(K= \) 8, 12 and 9 and different values of \(\nu _{1}\) and \(\nu _{2}\). The absolute errors of this method are plotted in Figure 2. We observe from the Figure that the convergence is exponential.
CPU time | \(C_{K}\) |
|---|---|
11.438 | \(3.4\times 10^{-2}\) |
45.14 | \(2\times 10^{-2}\) |
77.937 | \(2.1\times 10^{-3}\) |

Graph of the absolute error at K=8, 12, 16 and different values of \(\nu _{1}\) and \(\nu _{2}\)
Example 4
Suppose that the following V–FIE [27]
The exact solution of this equation is \(V(y)=e^{-y}\), where
In Table 4, we compare our results with the others and notice that the absolute error in the proposed method is better than the others for large values K. The errors of this method are displayed at \(K=2,5,8\) and 9 in Figure 3. It is clear from the Figure that the absolute errors decrease drastically with increasing the number of steps.
CPU time | \(C_{K}\) |
|---|---|
4.015 | \(5\times 10^{-3}\) |
54.64 | \(9.7\times 1^{-7}\) |
112.937 | \(6.19\times 10^{-11}\) |
128.611 | \(2.09\times 10^{-12}\) |

Graph of the error at N=2, 5, 8 and 9
Conclusions
This work aims to solve V–FIEs using the collocation based on the operational matrix of the generalized Lucas polynomials. By this method, the main problem is reduced the V–FIEs for four examples to a system of linear algebraic equations which significantly simplifies the problem, these equations are solved by Mathematica software. Then evaluate the errors. Numerical results are compared with those obtained by other techniques [25, 26, 30] to verify the accuracy of this method. The spectral results, that are obtained, point that this algorithm is high adequacy, viable and easy in applications. We discuss the convergence and error analysis. This method can solve applications in different fields in science such as mathematics, chemistry, physics, biology, fluid, engineering, mechanics, by using fractional differential equations and integral equations.
References
Doha, E.H., Bhrawy, A.H., Ezz-Eldien, S.S.: A new Jacobi operational matrix: an application for solving fractional differential equations. Appl. Math. Model. 36(10), 4931–4943 (2012)
Doha, E.H., Bhrawy, A.H., Baleanu, D., Ezz-Eldien, S.S.: The operational matrix formulation of the Jacobi tau approximation for space fractional diffusion equation. Adv. Differ. Equ. 2014(231), 4–14 (2014)
Hafez, R.M., Youssri, Y.H.: Jacobi collocation scheme for variable-order fractional reaction-subdiffusion equation. Comput. Appl. Math. 37, 5315–5333 (2018)
Abd-Elhameed, W.M., Doha, E.H., Youssri, Y.H.: Efficient spectral Petrov–Galerkin methods for third and fifth-order differential equations using general parameters generalized Jacobi polynomials. Quaest. Math. 36(1), 15–38 (2013)
Doha, E.H., Bhrawy, A.H., Baleanu, D., Ezz-Eldien, S.S.: On shifted Jacobi spectral approximations for solving fractional differential equations. Appl. Math. Comput. 219(15), 8042–8056 (2013)
Nikan, O., Avazzadeh, Z., Tenreiro Machado, J.A.: Numerical approximation of the nonlinear time-fractional telegraph equation arising in neutron transport. Commun. Nonlinear Sci. Numer. Simul. 99, 105755 (2021)
Nikan, O., Enreiro Machado, J.A., Golbabai, A., Rashidinia, J.: Numerical evaluation of the fractional Klein-Kramers model arising in molecular dynamics. J. Comput. Phys. 428, 109983 (2021)
Nikan, O., Avazzadeh, Z., Tenreiro Machado, J.A.: A local stabilized approach for approximating the modified time-fractional diffusion problem arising in heat and mass transfer. J. Adv. Res. (2021). https://doi.org/10.1016/j.jare.2021.03.002
Nikan, O., Avazzadeh, Z.: An improved localized radial basis-pseudospectral method for solving fractional reaction-subdiffusion problem. Results Phys. 23, 104048 (2021)
Youssri, Y.H., Abd-Elhameed, W.M.: Numerical spectral Legendre-Galerkin algorithm for solving time fractional Telegraph equation. Roman. J. Phys. 63(107), 1–16
Mohammed, G.S.: Numerical solution for telegraph equation of space fractional order by using Legendre Wavelets spectral tau algorithm. Aust. J. Basic Appl. Sci. 10(12), 381–391 (2016)
Tuan, N.H., Ganji, R.M., Jafari, H.: A numerical study of fractional rheological models and fractional Newell–Whitehead–Segel equation with non-local and non-singular kernel. Chin. J. Phys. 68, 308–320 (2020)
Ortiz, E.L., Samara, H.: Numerical solutions of differential eigen values problems with an operational approach to the tau method. Computing 31, 95–103 (1983)
Doha, E.H., Abd-Elhameed, W.M., Elkot, N.A., Youssri, Y.H.: Integral spectral Tchebyshev approach for solving Riemann–Liouville and Riesz fractional advection-dispersion problems. Adv. Differ. Equ. 1(2017) 1–23(2017)
Amany Mohamed, S., Mahmoud Mokhtar, M.: Spectral tau-Jacobi algorithm for space fractional advection-dispersion problem. Appl. Appl. Math. 14(1), 548–561 (2019)
Ganji, R.M., Jafari, H., Kgarose, M., Mohammadi, A.: Numerical solutions of time-fractional Klein-Gordon equations by clique polynomials. Alex. Eng. J. 60(5), 4563–4571 (2021)
Abd-Elhameed, W.M., Youssri, Y.H.: Genealized Lucas polynomial sequence approach for fractional differential equations. Nonlinear Dyn. 89, 1341–1355 (2017)
Mahmoud Mokhtar, M., Amany Mohamed, S.: Lucas polynomials semi-analytic solution for fractional multi-term initial value problems. Adv. Differ. Equ. 2019(1), 471 (2019)
Youssri, Y.H., Abd-Elhameed, W.M., Mohamed, A.S., Sayed, S.M.: Generalized Lucas polynomial sequence treatment of fractional pantograph differential equation. Int. J. Appl. Comput. Math. 7(2), 1–16 (2021)
Abd-Elhameed, W.M., Youssri, Y.H.: Spectral tau algorithm for certain coupled system of fractional differential equations via generalized Fibonacci polynomial sequence. Iran. J. Sci. Technol. Trans. A Sci. 43, 43–55 (2019)
Tuan, N.H., Nemati, S., Ganji, R.M., Jafari, H.: Numerical solution of multi-variable order fractional integro-differential equations using the Bernstein polynomials. Eng. Comput. (2020). https://doi.org/10.1007/s00366-020-01142-4
Ganji, R.M., Jafari, H., Nemati, S.: A new approach for solving integro-differential equations of variable order. J. Comput. Appl. Math. 379, 112946 (2020)
Jafari, H., Tuan, N.H., Ganji, R.M.: A new numerical scheme for solving pantograph type nonlinear fractional integro-differential equations. J. King Univ.-Sci. 33(1), 101185 (2021)
Yousefi, S.A., Lotfi, A.: Dehghan, Mehdi: He’s varational iteration method for solving nonlinear mixed Volterra–Fredholm integral equations. Comput. Math. Appl. 58(11–12), 2172–2176 (2009)
Wang, K.Y., Wang, Q.S.: Taylor collocation method and convergence analysis for the Volterra–Fredholm integro-differential equations. J. Comput. Appl. Math. 260, 294–300 (2014)
Maleknejad, K., Mahmoudi, Y.: Taylor polynomial solution of high-order nonlinear Volterra-Fredholm integral equations. Appl. Math. Comput. 145(2–3), 641–653 (2003)
Nemati, S.: Numerical solution of Volterra–Fredholm integral equations using Legendre collocation method. J. Comput. Appl. Math. 278, 29–36 (2015)
Youssri, Y.H., Hafez, R.M.: Chebyshev collocation treatment of Volterra–Fredholm integral equation with error analysis. Arab. J. Math. 9, 471–480 (2020)
Abd-Elhameed, W.M., Youssri, Y.H.: Numerical solutions for Volterra–Fredholm–Hammerstein integral equations via second kind Chebyshev quadrature collocation algorithm. Adv. Math. Sci. Appl. 24, 129–141 (2014)
Wang, K.Y., Wang, Q.S.: Lagrange collocation method for solving Volterra–Fredholm integral equations. Appl. Math. Comput. 219(21), 10434–10440 (2013)
Brunner, H.: On the numerical solution of Volterra–Fredholm integral equation by collocation methods. SIAM J. Numer. Anal. 27(4), 987–1000 (1990)
Hsiao, C.H.: Hybrid function method for solving Fredholm and Volterra integral equations of second kind. J. Comput. Appl. Math. 230(1), 59–68 (2009)
Maleknejad, K., Hadizadeh, M.: A new computational method for Volterra-Fredholm integral equations. Comput. Math. Appl. 37(9), 1–8 (1999)
Cetin, M., Sezer, M., Guler, C.: Lucas polynomial approach for system of high-order linear differential equations and residual error estimation. Math. Probl. Eng. 1–14, 2015 (2015)
Rainville, E.D.: Special functions. Chelsea, New York (1960)
Koshy, T.: Fibonacci and Lucas Numbers with Applications. Wiley, Hoboken (2019)
Acknowledgements
The authors are very grateful to the anonymous referees for careful reviewing and crucial comments, which enabled us to improve the manuscript.
Funding
This research received no specific grant from any funding agency in the public, commercial, or not-for-profit sectors.
Author information
Authors and Affiliations
Contributions
All authors contributed equally to this work. All authors read and approved the final manuscript.
Corresponding author
Ethics declarations
Competing interests
The author declares that she has no competing interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Mohamed, A.S. Spectral Solutions with Error Analysis of Volterra–Fredholm Integral Equation via Generalized Lucas Collocation Method. Int. J. Appl. Comput. Math 7, 178 (2021). https://doi.org/10.1007/s40819-021-01115-1
Accepted:
Published:
DOI: https://doi.org/10.1007/s40819-021-01115-1
Keywords
- Volterra–Fredholm integral equation
- Generalized Lucas polynomials
- Collocation method
- Operational matrix
- Convergence and error analysis