
Abstract
In this manuscript, we have proposed the scheme of dual combination combination multiswitching synchronization for fractional order hyperchaotic nonlinear dynamical systems. The proposed scheme has been applied to fractional order hyperchaotic systems. To verify the results, numerical simulations are carried out using Matlab by taking the hyperchaotic Lü system, Lorenz system, Chen system and the Rössler system as examples.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
The concept of chaos synchronization has become an important area of research since it was first proposed by Pecora and Carroll in their seminal paper [1]. It has potential applications in interdisciplinary fields such as physics [2], electrical engineering [3], economics [4], communication theory [5], biological systems [6], chemistry [7], information processing [8] etc. Several methods have been proposed by the researchers over the years such as complete synchronization [9], anti synchronization [10], hybrid synchronization [11], hybrid function projective synchronization [12], phase and anti-phase synchronization [13], lag synchronization [14], projective synchronization [15], hybrid projective synchronization [16] to synchronize either identical or non-identical chaotic systems. Various techniques have also been developed to synchronize the chaotic systems such as active control method [17], linear and nonlinear feedback control method [18, 19], backstepping control method [20], sliding mode control method [21], adaptive control method [22] etc.
The majority of the work to synchronize the chaotic systems has been restricted to only a single drive—response system, wherein a single response system is synchronized with a single drive system. Recently this work has been extended to multiple drive—response systems where two or more chaotic systems are synchronized, such as dual synchronization, combination synchronizaion, combination–combination synchronization, dual combination combination synchronization, compound synchronization [23,24,25,26,27] and so on. These schemes are eloquent in strengthening the security of the information that is transmitted through the chaotic signals.
In dual synchronization scheme, two drive systems are synchronized with two response systems. Liu and Davids [28] first introduced the concept of dual synchronization in the year 2000. Since then a lot of work has been done on dual synchronization of the chaotic systems [29, 30]. The method of combination synchronization involves one response system while the combination–combination syncronization is an addition to combination synchronization wherein two response systems are used to synchronize the two drive systems. Dual combination–combination synchronization is a further extension, where two pair of drive systems each having two chaotic systems and two pair of response systems each containing two chaotic systems are synchronized.
Ucar et al. [31] proposed the concept of multiswitching synchronization as a significant and attractive continuation of the existing synchronization schemes. In this scheme, the different states of the drive system are synchronized with the different states of the response system. Due to the potential applications of this scheme in information security, it has become an interesting area of research among the researchers. A few work done in this direction can be seen in [32,33,34].
Fractional calculus is a classical mathematical concept that has a history as long as calculus itself. The benefit of fractional calculus, over the integer calculus, lies in the fact that fractional order systems describe real systems in interdisciplinary fields more elegantly in comparison to integer order structures. The birth of fractional calculus goes back to 1695 when for the first time Leibniz suggested the possibility of existance of fractional derivatives. Many great mathematicians like Abel, Riemann, L’Hôpital, Fourier, Euler, Laplace, Liouville have contributed directly or indirectly towards the development of fractional calculus theory and its mathematical consequences. A considerable use of fractional calculus has been made in engineering. It has been used as a to model complex systems. Linear viscoelasticity is certainly the field of the most extensive applications of fractional calculus since its appearance, in view of its ability to model hereditary phenomena with long memory. Fractional calculus has become an exciting mathematical tool for solving diverse problems in physics, engineering and mathematics. In the field of dynamical system theory, a lot of work has been done in synchronizing fractional order chaotic systems [2,3,4,5,6, 15, 16, 21, 22].
In this paper, we present the idea of dual combination–combination multiswitching synchronization for the fractional order hyperchaotic systems. The main significant addition of this work is that the concept of dual combination combination multiswitching synchronization (DCCMS) has been applied to fractional order systems. Previously, this method has been applied to synchronize only the integer order chaotic systems [33]. We have extended this work to synchronize 4D fractional order systems by the proposed scheme using active control technique. No work has been done previously for synchronizing the eight fractional order hyperchaotic systems by this method. The eight hyperchaotic systems synchronized by this scheme have four drive systems and four response systems involved. Using the fractional order hyperchaoic Lü system, Lorenz system, Chen system and the Rössler system as examples, we have shown the effectiveness of the proposed scheme. Suitable controllers have been designed to achieve the desired synchronization by using the Lyapunov stability criteria for fractional order systems.
This paper is organized as: In “DCCMS Between the Fractional Order Hyperchaotic Systems” section, the scheme of DCCMS has been proposed. In “Example” section, the proposed scheme has been applied to fractional order hyperchaotic systems. The results are validated by performing numerical simulations in “Numerical Simulations” section. Finally, the conclusions are given in “Conclusion” section.
DCCMS Between the Fractional Order Hyperchaotic Systems
Consider two pair of four hyperchaotic drive systems given by
and
where \(u_{1} = (u_{11},u_{12}, \ldots , u_{1n})^{T}, u_{2} = (u_{21}, u_{22}, \ldots , u_{2n})^{T}\) are the state vectors of the drive systems (1) and (2) respectively and \(\phi _{1}, \phi _{2} : {\mathbb {R}}^n \rightarrow {\mathbb {R}}^n\) are nonlinear continuous vector functions. \(v_{1} = (v_{11}, v_{12}, \ldots , v_{1n})^{T}, v_{2} = (v_{21}, v_{22}, \ldots , v_{2n})^{T}\) are the state vectors of the drive systems (3) and (4) respectively and \(\psi _{1}, \psi _{2} : {\mathbb {R}}^n \rightarrow {\mathbb {R}}^n\) are known continuous vector functions.
Consider the corresponding two pair of four hyperchaotic response systems given by
and
where \(w_{1} = (w_{11}, w_{12}, \ldots , w_{1n})^{T}, w_{2} = w_{21}, w_{22}, \ldots , w_{2n})^{T}\) are the state vectors of the response systems (5) and (6) respectively and \(\eta _{1}, \eta _{2} : {\mathbb {R}}^n \rightarrow {\mathbb {R}}^n\) are known continuous vector functions. \(z_{1} = (z_{11}, z_{12}, \ldots , z_{1n})^{T}, z_{2} = (z_{21}, z_{22}, \ldots , z_{2n})^{T}\) are the state vectors of the systems (7) and (8) respectively and \(\zeta _{1}, \zeta _{2} : {\mathbb {R}}^n \rightarrow {\mathbb {R}}^n\) are nonlinear continuous vector functions. \(\theta _{1} = (\theta _{11}, \theta _{12}, \ldots , \theta _{1n})^{T}, \theta _{2} = (\theta _{21}, \theta _{22}, \ldots , \theta _{2n})^{T}, \theta _{1}^{*} = (\theta _{11}^{*}, \theta _{12}^{*}, \ldots , \theta _{1n}^{*})^{T}\) and \(\theta _{2}^{*} = (\theta _{21}^{*}, \theta _{22}^{*}, \ldots , \theta _{2n}^{*})^{T}\) are the nonlinear controllers to be determined.
Definition 1
The drive systems attain the Dual Combination Combination Synchronization with the response systems, if there exist matrices P, Q, R and S of order \(2n \times 2n\) such that
where \(\parallel .\parallel \) is the Euclidean norm and \(e(t) = (e_{1}(t), e_{2}(t))^{T}\) is the error signal, \(u = (u_{1}, u_{2})^{T}, v = (v_{1}, v_{2})^{T}, w = (w_{1}, w_{2})^{T}\) and \(z = (z_{1}, z_{2})^{T}\) are the state vectors of the drive and response systems.
Remark 1
The matrices P, Q, R and S in the above definition are called scaling matrices and are taken as diagonal matrices for convenience. Let us take \(P = diag(P_{1}, P_{2})\), where \(P_{1} = diag(\alpha _{11},\alpha _{12}, \ldots , \alpha _{1n})\) and \(P_{2} = diag(\alpha _{21}, \alpha _{22}, \ldots , \alpha _{2n})\), \( Q = diag(Q_{1},Q_{2}) \), where \( Q_{1}= diag(\beta _{11},\beta _{12}, \ldots , \beta _{1n})\) and \(Q_{2}=diag(\beta _{21}, \beta _{22}, \ldots , \beta _{2n}), R = diag(R_{1}, R_{2})\), where \(R_{1} = diag(\gamma _{11},\gamma _{12}, \ldots , \gamma _{1n})\) and \(R_{2} = diag(\gamma _{21}, \gamma _{22}, \ldots , \gamma _{2n})\) and \(S = diag(S_{1}, S_{2})\), where \(S_{1} = diag(\delta _{11},\delta _{12}, \ldots , \delta _{1n})\) and \(S_{2} = diag(\delta _{21}, \delta _{22}, \ldots , \delta _{2n}). \)
Remark 2
Using the notations of remark (1), the condition for the synchronization of the eight systems in Definition 1, is equivalent to
and
The components \(e_{1}, e_{2}\) of the error signal given by \(e_{1} = (e_{11}, e_{12}, \ldots , e_{1n})^{T}\) and \(e_{2} = (e_{21}, e_{22}, \ldots , e_{2n})^{T}\) are described as:
and
where \( k = 1,2,3, \ldots , n\).
Remark 3
Using the notations of Remarks 1 and 2, the components of the error signal e(t) can further be defined as
and
where \(i,j,l,m = 1,2,3, \ldots , n\) and \(k = 1, 2, \ldots , n\)
Definition 2
If the indices i, j, l, m are choosen in a way such that \(i = j = l \ne m \) or \(i = j = m \ne l\) or \(i \ne j = l = m\) or \(j \ne i = l = m\) or \(i = j \ne l = m\) or \(i = j \ne l \ne m\) or \(i \ne l \ne j = m\) or \(i \ne j \ne l = m\) or \(i \ne j = l \ne m\) or \(i = l \ne j = m\) or \(i = m \ne j = l\) or \(i = l \ne j \ne m\) or \(i = m \ne j \ne l\) or \(i \ne j \ne l \ne m\), and
where \(||.||\) is the Euclidean norm, then the drive systems are said to be in Dual Combination Combination Multiswitching Synchronization (DCCMS) with the response systems.
Remark 4
If the indices i, j, l, m are choosen such that \(i = j = l = m \), then the Dual combination combination multiswitching synchronization becomes dual combination combination synchronization.
Remark 5
If either \(R = 0\) or \(S = 0\) then the dual combination combination multiswitching synchronization reduces to dual combination multiswitching synchronization.
Remark 6
If either \(P_{1}= Q_{1} = R_{1} = S_{1} = 0 \) or \(P_{2} = Q_{2} = R_{2} = S_{2} = 0\) then the dual combination combination multiswitching synchronization reduces to combination combination multiswitching synchronization.
Remark 7
If either \(P_{1}= Q_{1} = R_{1} = S_{1} = 0 \) and \(R_{2} = 0\) or \(S_{2} = 0\) or \(P_{2} = Q_{2} = R_{2} = S_{2} = 0\) and \(R_{1} = 0\) or \(S_{1} = 0\) then the dual combination combination multiswitching synchronization reduces to multiswitching combination synchronization.
Remark 8
If \(P= -I_{n}\) and \(Q = - I_{n}\) then the dual combination combination multiswitching synchronization becomes dual combination combination multiswitching anti synchronization, where \(I_{2n}\) is the \(2n \times 2n\) Identity matrix.
From systems (1–8), the error dynamical system becomes
Our goal is to design the contollers \(\varTheta _{i} = R_{i} \theta _{i} + S_{i} \theta _{i}^{*}\) such that the error dynamics reduces to Be(t), and all the eigenvalues \(\lambda _{i}\) of the matrix B satisfy the condition \(\arrowvert arg(\lambda _{i})\arrowvert \ge \frac{\alpha \pi }{2}, i= 1, 2, 3, \ldots 2n\), such that the drive and response systems are synchronized.
Remark 9
If the fractional order q is taken to be 1, then the results can be used for integer order systems also by choosing the nonlinear controllers as
and
where \(k_{1}, k_{2}\) are positive real numbers. Defining the Lyapunov function as
and by using Lyapunov stability criteria [35], synchronization can be achieved between the integer order systems. The results in this article are therefore the generalization of the results for integer order systems.
Example
In this section we will consider four non- identical fractional order hyperchaotic systems to achieve synchronization between the systems. Consider the fractional order Lü system and the fractional order Rössler system as the first pair of two fractional order hyperchaotic drive systems is given by
where \((u_{11}, u_{12}, u_{13}, u_{14})^{T}\) and \((u_{21}, u_{22}, u_{23}, u_{24})^{T}\) are the state vectors of the Lü and Rössler systems respectively, \(a_{1}, b_{1}, c_{1}, d_{1}\) and \(a_{2}, b_{2}, c_{2}, d_{2}\) are the real parameters of the Lü and Rössler systems respectively. The second pair of two drive systems as Chen and Lorenz system are given by
where \((v_{11}, v_{12}, v_{13}, v_{14})^{T}\) and \((v_{21}, v_{22}, v_{23}, v_{24})^{T}\) are the state vectors of the Chen and Lorenz systems respectively and \(a_{3}, b_{3}, c_{3}, d_{3}, f_{3}\) and \(a_{4}, b_{4}, c_{4}, d_{4}\) are the real parameters of the systems (11) and (12) respectively.
Corresponding to the drive systems, the two pair of fractional order hyperchaotic response systems are given by
and
where \((w_{11}, w_{12}, w_{13}, w_{14})^{T}, (w_{21}, w_{22}, w_{23}, w_{24})^{T}\) are the state vectors of the first pair of response systems and \((z_{11}, z_{12}, z_{13}, z_{14})^{T}, (z_{21}, z_{22}, z_{23}, z_{24})^{T}\) are the state vectors of the second pair of response systems respectively. \((\theta _{11}, \theta _{12}, \theta _{13}, \theta _{14})^{T}, (\theta _{21}, \theta _{22}, \theta _{23}, \theta _{24})^{T}, (\theta _{11}^{*}, \theta _{12}^{*}, \theta _{13}^{*}, \theta _{14}^{*})^{T}\) and \((\theta _{21}^{*}, \theta _{22}^{*}, \theta _{23}^{*}, \theta _{24}^{*})^{T}\) are the non - linear controllers to be determined.
A large number of switches are possible between the state vectors of the drive and response systems. Consider one such possible switch as:
Using systems (9–16), the error dynamical system becomes
Defining the active controllers as:
With this choice of controllers, the error system becomes
where \(U_{ij}\) are active controllers. Choosing the control functions \(U_{ij}\) such that
where A is a \(8 \times 8\) matrix choosen in a way such that all the eigenvalues \(\lambda _{i}\) of the linear system (17) satisfies the condition that \(|arg(\lambda _{i})|\ge \frac{q \pi }{2}\). Hence by the stability criteria for fractional order systems DCCMS is achieved between the drive and response systems.

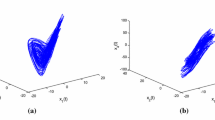
State vectors \(x_{11} + y_{12}\) and \(z_{13} + w_{14}\) after the controllers are applied

State vectors \(x_{12} + y_{11}\) and \(z_{13} + w_{11}\) after the controllers are applied
Numerical Simulations
Based on the DCCMS scheme discussed above, the drive systems (9–12) are synchronized with the response systems (13–16) for fractional order \(\alpha = 0.95\). The initial conditions of the drive and response systems are \((u_{11}, u_{12}, u_{13}, u_{14}) = (5, 8, -1, -3) , (u_{21}, u_{22}, u_{23}, u_{24}) = (-10, -6, 0, 10), (v_{11}, v_{12}, v_{13}, v_{14}) = (3, -4, 2, 2), (v_{21}, v_{22}, v_{23}, v_{24}) = (12, 22, 31, 4) \), \((w_{11}, w_{12}, w_{13}, w_{14}) = (5.1, 8.1, -1.1, -3.1), (w_{21}, w_{22}, w_{23}, w_{24}) = (-10.1,-6.1, 0.1, 10.1), (z_{11}, z_{12}, z_{13}, z_{14}) = (3.1,-3.9, 2.1, 1.9), (z_{21}, z_{22}, z_{23}, z_{24}) = (12.1, 21.9, 30.9, 4.1) \) respectively. Therefore the initial conditions for the error system becomes \((e_{11}, e_{12}, e_{13}, e_{14}) = (-8.2, -9, -2, 10.2)\) and \( (e_{21}, e_{22}, e_{23}, e_{24}) = (10, 20, 24, -8.8)\). The known real parameters of the hyperchaotic systems are \(a_{1} = 36, b_{1} = 3, c_{1} = 20, d_{1} = 1.3\) and \(a_{2} = 0.25, b_{2} = 3, c_{2} = 0.5, d_{2} = 0.05, a_{3} =35, b_{3} = 7, c_{3} = 12, d_{3} = 3 , f_{3} = 0.5, a_{4} = 10, b_{4} = 28, c_{4} = 8/3, d_{4} = -1\). The diagonal matrices P, Q, R and S are taken as identity matrices for convenience. The matrix A is choosen as

State vectors \(x_{13} + y_{12}\) and \(z_{14} + w_{12}\) after the controllers are applied

State vectors \(x_{14} + y_{11}\) and \(z_{12} + w_{13}\) after the controllers are applied

State vectors \(x_{21} + y_{22}\) and \(z_{23} + w_{22}\) after the controllers are applied

State vectors \(x_{23} + y_{21}\) and \(z_{24} + w_{22}\) after the controllers are applied

State vectors \(x_{22} + y_{24}\) and \(z_{23} + w_{22}\) after the controllers are applied

State vectors \(x_{21} + y_{23}\) and \(z_{23} + w_{21}\) after the controllers are applied

Error dynamics versus time t
such that all the eigenvalues \(\lambda _{i}\) of the linear system 17 are negative and thus the condition \( |arg(\lambda _{i})|\ge \frac{q \pi }{2}\) is satisfied. The state trajectories of the signals are shown in Figs. 1, 2, 3, 4, 5, 6, 7 and 8 after the controllers have been applied. It can be seen from Fig. 9 that the error system converges to zero which shows that the drive and response systems are synchronized.
Conclusion
A novel scheme of dual combination combination multiswitching synchronization (DCCMS) has been introduced for synchronizing eight fractional order hyperchaotic systems. The proposed method is then applied to hyperchaotic Lü system, Rössler system, Chen system and Lorenz system as examples. Due to multiswitching of signals, this type of synchronization assures a highly secure communication. Owing to a substantial number of possible switchings of the signals, it becomes very difficult for the infiltrator to determine the correct combination for error vector. This method of synchronization is quite complex as compared to multiswitching combination combination synchronization, where only two drive systems and two response system are involved. Various cases were discussed where this DCCMS becomes Dual combination multiswitching synchronization, combination combination mulswitching synchronization, dual combination combination multiswitching anti synchronization and so on. Numerical simulation are carried out using Matlab and there is a complete agreement between the theoretical and analytical results.
References
Pecora, L., Carroll, T.: Synchronization in chaotic systems. Phys. Rev. Lett. 64(8), 821–824 (1990)
Luo, Y., Chen, Y., Pi, Y.: Experimental study of fractional order proportional derivative controller synthesis for fractional order systems. Mechatronics 21(1), 204–214 (2011)
Monti, A., Ponci, F., Lovett, T.: A polynomial chaos theory approach to uncertainty in electrical engineering. In: Proceedings of the 13th International Conference on Intelligent Systems, Application to Power Systems, pp. 534–539 (2005)
Laskin, N.: Fractional market dynamics. Physica A 287(3–4), 482–492 (2000)
Kiani-B, A., Fallahi, K., Pariz, N., Leung, H.: A chaotic secure communication scheme using fractional chaotic systems based on an external fractional Kalman filter. Commun. Nonlinear Sci. Numer. Simul. 14, 863–879 (2009)
Magin, R.L.: Fractional calculus models of complex dynamics in biological tissues. Comput. Math. Appl. 59(5), 1586–1593 (2010)
Li, Mengshan, Huanga, Xingyuan, Liua, Hesheng, Liub, Bingxiang, Wub, Yan, Xiongc, Aihua, Dong, Tianwen: Prediction of gas solubility in polymers by back propagation artificial neural network based on self-adaptive particle swarm optimization algorithm and chaos theory. Fluid Phase Equilib. 356, 11–17 (2013)
Potapov, A.B., Ali, M.K.: Nonlinear dynamics and chaos in information processing neural networks. Differ. Equ. Dyn. Syst. 9(3–4), 259–319 (2001)
Guo, Q., Wan, F.: Complete synchronization of the global coupled dynamical network induced by Poisson noises. PLoS ONE 12(12), 1–11 (2017)
Vaidyanathan, S.: Anti-synchronization of Lorenz and T chaotic systems by active nonlinear control. Int. J. Comput. Inf. Syst. 2(4), 6–10 (2011)
Sudheer, K.S., Sabir, M.: Hybrid synchronization of hyperchaotic Lu system. Pramana J. Phys. 73(4), 781–786 (2009)
Khan, A., Shikha: Hybrid function projective synchronization of chaotic systems via adaptive control. Int. J. Dyn. Control 5(4), 1114–1121 (2017)
Ho, M., Hung, Y., Chou, C.: Phase and antiphase synchronization of two chaotic systems by using active control. Phys. Lett. A 296, 43–48 (2002)
Chen, Y., Jia, Z., Deng, G.: Adaptive lag synchronization of Lorenz chaotic system with uncertain parameters. Appl. Math. 3, 549–553 (2012)
Al-sawalha, M.M.: Projective reduce order synchronization of fractional order chaotic systems with unknown parameters. J. Nonlinear Sci. Appl. 10, 2103–2114 (2017)
Wang, S., Yu, Y., Diao, M.: Hybrid projective synchronization of chaotic fractional order systems with different dimensions. Physica A 389, 4981–4988 (2010)
Yassen, M.T.: Chaos synchronization between two different chaotic systems using active control. Chaos Solitons Fractals 23, 131–140 (2005)
Wang, F., Liu, C.: A new criterion for chaos and hyperchaos synchronization using linear feedback control. Phys. Lett. A 360, 274–278 (2006)
Huang, L., Feng, R., Wang, M.: Synchronization of chaotic systems via nonlinear control. Phys. Lett. A 320(4), 271–275 (2004)
Yassen, M.T.: Chaos control of chaotic dynamical systems using backstepping design. Chaos Solitons Fractals 27, 537–548 (2006)
Hosseinnia, S.H., Ghaderi, R., Ranjbar, A., Mahmoudian, M., Momani, S.: Sliding mode synchronization of an uncertain fractional order chaotic system. Comput. Math. Appl. 59(5), 1637–1643 (2010)
Zhang, R., Yang, S.: Adaptive synchronization of fractional-order chaotic systems via a single driving variable. Nonlinear Dyn. 66(4), 831–837 (2011)
Runzi, L., Yinglan, W., Shucheng, D.: Combination synchronization of three classic chaotic systems using active backstepping design. Chaos 21, 1–11 (2011)
Sun, J., Jiang, X., Cui, G., Wang, Y.: Dual combination synchronization of six chaotic systems. J. Comput. Nonlinear Dyn. 11, 1–5 (2016)
Sun, J., Shen, Y., Zhang, G., Xu, C., Cui, G.: Combination combination synchronization among four identical or different chaotic systems. Nonlinear Dyn. 73(3), 1211–1222 (2013)
Sun, J., Cui, G., Wang, Y., Shen, Y.: Combination complex synchronization of three chaotic complex systems. Nonlinear Dyn. 79(2), 953–965 (2015)
Sun, J., Shen, Y., Cui, G.: Compound synchronization of four chaotic complex systems. Adv. Math. Phys. 2015, 1–11 (2015)
Liu, Y., Davids, P.: Dual synchronization of chaos. Phys. Rev. E 61, 2176–2184 (2000)
Othman, A.A., Noorani, M.S.M., Al-Sawalha, M.M.: Dual synchronization of chaotic and hyperchaotic systems. J. Nonlinear Sci. Appl. 9, 4666–4677 (2016)
Xiao, J., Ma, Z., Yang, Y.: Dual synchronization of fractional order chaotic systems via a linear controller. Sci. World J. 2013, 1–6 (2013)
Ucar, A., Lonngren, K.E., Bai, E.W.: Multi-switching synchronization of chaotic systems with active conrollers. Chaos Solitons Fractals 38(1), 254–262 (2008)
Vincent, U.E., Saseyi, A.O., McClintock, P.V.E.: Multi-switching combination synchronization of chaotic systems. Nonlinear Dyn. 80(1–2), 845–854 (2015)
Khan, A., Khattar, D., Prajapati, N.: Dual combination combination multiswitching synchronization of eight chaotic systems. Chin. J. Phys. 55, 1209–1218 (2017)
Khan, A., Khattar, D., Prajapati, N.: Multiswitching combination combination synchronization of chaotic systems. Pramana J. Phys. 88, 1–9 (2017)
Lyapunov, A.M.: The general problem of the stability of motion. Int. J. Control 55(3), 531–534 (1992)
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Khan, A., Khattar, D. & Agrawal, N. Dual Combination Combination Multiswitching Synchronization of Eight Fractional Order Hyperchaotic Non Linear Dynamical Systems. Int. J. Appl. Comput. Math 5, 137 (2019). https://doi.org/10.1007/s40819-019-0722-z
Published:
DOI: https://doi.org/10.1007/s40819-019-0722-z
Keywords
- Chaos synchronization
- Fractional order
- Nonlinear control
- Multiswitching synchronization
- Dual synchronization
- Combination combination synchronization