
Abstract
The analysis of nonlinear equations performs a significant part in examining the physical phenomena. In this article, the exact solution of time-fractional (2 + 1) dimensional Konopelchenko–Dubrovsky equation (KDE) has been derived by utilising the Kudryashov method. The Kudryashov technique is effectively implemented in order to acquire the analytical solutions of the time-fractional KDE. As exact solution of fractional KDE is not documented previously, the Kudryashov technique is utilized to construct exact solutions via fractional complex transform. The solution thus attained by the above method is illustrated graphically and are discussed in details. This research analysis manifests that the Kudryashov method deemed capable of yielding solutions of such fractional differential equations.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
Fractional calculus has been participated a significant role in numerous applications for modeling anonymous diffusion, signal processing, image processing, control theory and various other dynamical system [1,2,3,4]. Fractional differential equations (FDEs) have appealed great consideration because of their implementations in various physical difficulty. The descriptions of properties of physical happenings are aptly described by FDEs. Therefore, an efficient technique is required for solving nonlinear FDEs. Different analytical and numerical techniques have been utilized to derive approximate and exact solutions of FDEs [5,6,7,8].
The analysis of nonlinear equations performs a significant part in examining the physical phenomena. Both mathematicians and physicists made noteworthy development in analysing explicit solutions of nonlinear FDEs. In this present article, the emphasis is on the implementation of the Kudryashov technique for determining the analytical exact solution of time-fractional KDE with a prospect to demonstrate the efficiency of this technique in managing nonlinear equation. This method is comparatively a new approach that provides analytical solutions to both linear and nonlinear problems. It may be deemed as an effective tool for physicists, scientists and applied mathematicians in order to yield analytical exact solutions to the generalized differential equations.
Some noteworthy attempt has been anticipated by the researchers for studying nonlinear equations arising in mathematical physics. Here, the KDE has been considered, that plays an essential part both in applied mathematics and physics. The analysis of nonlinear equations performs a significant part in examining the physical phenomena.
Consider the time-fractional KD equations as follows
where \( \alpha \)\( (0 < \alpha \le 1) \) denotes the order of fractional derivative, a and b are real parameters. The KDE is a new nonlinear integrable evolution equation on two spatial dimensions and one temporal. It was first derived by Konopelchenko and Dubrovsky [9] in 1984. KDE of integer order appears in a great variety of subjects as such in physics, signals processing, dynamics and control theory, and has attracted much attention of more and more scholars.
Numerous methods such as the Exp-function method [11], homogenous balance method [10], the inverse scattering transform method [9], the F-expansion method [12], the improved tanh function method [13, 14], the tanh-sech method, the cosh-sinh method and exponential method [15], Hirota’s method [16], \( \left( {G^{\prime}/G} \right) \)-expansion method [17], rational expansion method [18], and singular manifold method [19] had been utilized to attain exact solutions of KDE.
But the comprehensive analysis of the nonlinear fractional KDE is just the opening. The exact analytical solutions of fractional KDE have been documented first time ever in this manuscript. Hence, the main objective is to establish novel exact solutions of fractional KDE by utilizing the generalized Kudryashov technique.
The manuscript is organized as follows. An introduction to fractional calculus, definitions of Jumarie’s modified Riemann–Liouville (mRL) derivative have been provided in Sect. 2. In Sect. 3, the algorithm to solve FPDEs by utilizing generalized Kudryashov technique via fractional complex transform is proposed. The Kudryashov technique has been employed to establish the new analytical solutions for fractional KDE is discussed in Sect. 4. The numerical simulations are presented in Sects. 5 and 6 completes the manuscript.
Modified Riemann–Liouville Derivative
The Jumarie’s mRL derivative [20, 21] of order \( \alpha \) is stated by
which can be written as
Algorithm of Generalized Kudryashov method
The steps involving generalized Kudryashov technique are discussed below:
Step 1 Consider a nonlinear FPDE, comprising two variables \( x \) and \( t \) as
where \( P \) is a polynomial involving \( u \) and its various partial derivatives and nonlinear terms, u = u(x, t) is an unknown function.
Step 2 Utilizing the FCT [22, 23]:
where \( c_{1} \) and \( k \) are constants that are to be evaluated later. Hence the FDE is transformed to the following ODE for \( u(x,t) = U(\xi ) \):
Here, P is function of \( U(\xi ) \) and “׳” denotes \( \frac{d}{d\xi }. \)
Step 3 Suppose that the solution of Eq. (3.3) can be expressed by a polynomial in \( \phi (\xi ) \) as follows:
where \( a_{n} ,n = 0,1,2, \ldots ,N \)\( (a_{N} \ne 0) \) are constant to be evaluated, the integer N is computed by balancing the nonlinear term with the highest order derivative term occurring in Eq. (3.3) and \( \phi (\xi ) \) is the function of the form
that satisfies the ODE
Step 4 Putting Eq. (3.4) in Eq. (3.3) and utilizing Eq. (3.5), collecting all the terms with the same powers of \( \phi^{i} (i = 0,1,2, \ldots ) \) together, the eq. (3.3) is transformed to a new polynomial in \( \varphi \). Equating every coefficient of this polynomial to zero provides a set of algebraic equations for \( a_{i} (i = 0,1,2, \ldots ,n) \).
Step 5 The algebraic equations acquired above can be solved and subsequently substituted in Eq. (3.4), the explicit exact solutions of Eq. (3.1) can be attained immediately.
Analytical solution of time-fractional KDE
This segment consists of the solutions of fractional KDE by using the newly proposed Kudryashov technique to calculate the exact solution of time-fractional KDE (1.1).
By applying the FCT \( \xi = k_{1} x + k_{2} y + \frac{{k_{3} t^{\alpha } }}{\varGamma (\alpha + 1)} \), Eq. (1.1) can be converted to the nonlinear ODEs as:
Now, by balancing the nonlinear term with the highest order derivative term of Eq. (4.1), the value of N is 1.
Therefore, from Eq. (3.4)
where \( \phi (\xi ) = \frac{1}{1 + \exp (\xi )} \) is new variable as given in Eq. (3.5)
Then from Eq. (4.2), putting the derivatives of \( U(\xi ) \) and taking the ansatz into account, a system of algebraic equations were obtained. Collecting the same powers of \( \phi^{i} \) and equating to zero, the following system of nonlinear equations can be acquired:
The following family of nontrivial solutions can be acquired by solving the above system of algebraic equations.
Case I
and k1 and k2 are arbitrary.
Substituting the values of \( a_{0} ,a_{1} \) and \( k_{3} \), obtained above, we get
where \( \xi = k_{1} x + k_{2} y + \frac{{k_{3} t^{\alpha } }}{\varGamma (\alpha + 1)} \).
Case II
and k1 and \( k_{2} \) are arbitrary.
Substituting the values of a0, a1 and k3, obtained above, we get
where \( \xi = k_{1} x + k_{2} y + \frac{{k_{3} t^{\alpha } }}{\varGamma (\alpha + 1)} \).
Results
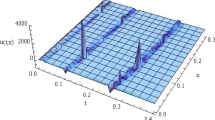
For time fractional KD equation, the exact solutions have been attained for the first time by generalized Kudryashov technique with the aid of fractional complex transform. In case of time fractional KD equation, the following Figs. 1, 2, and 3 show the solitary wave solution of \( u\left( {x,y,t} \right) \), obtained by the proposed Kudryashov technique for different values of α.

The 3-D plot of Solitary wave solution of \( u(x,y,t) \) for KD equation when \( a = b = 1, \) \( y = 1 \) and \( \alpha = 1 \)

The 3D plot of Solitary wave solution of \( u(x,y,t) \) for fractional KD equation when \( a = b = 1, \) \( y = 1 \) and \( \alpha = 0.75 \)

The 3D plot of Solitary wave solution of \( u(x,y,t) \) for fractional KD equation when \( a = b = 1, \) \( y = 1 \) and \( \alpha = 0.5 \)
Conclusion
In this manuscript, the solitary wave solutions of time-fractional (2 + 1) dimensional KDE have been acquired by utilizing the Kudryashov technique. By applying the FCT, a FDE can be transformed into its equivalent ODE form. The novel exact solutions, thus obtained may be suitable for description of physical phenomena accurately. This study signifies that the focused method is efficient for analytical solution of time fractional KD equation. Also it manifests that performance of the technique is substantially influential and absolutely dependable for finding new exact solutions.
References
Saha Ray, S., Gupta, A.K.: Wavelet Methods for Solving Partial Differential Equations and Fractional Differential Equations. CRC Press, Boca Raton (2018)
Abdou, M.A.: An anylatical approach for space-time fractal order nonlinear dynamics of microtubules. Waves Random Complex Media 2018, 1–8 (2018)
Abdou, M.A., Soliman, A.A., Biswas, A., Zhou, Q., Moshokoa, S.P.: Dark-singular combo optical solitons with fractional complex Ginzburg–Landau equation. Optik 171, 463–467 (2018)
Boutarfa, B., Akgül, A., Inc, M.: New approach for the Fornberg–Whitham type equations. J. Comput. Appl. Math. 312, 13–26 (2017)
Akgül, A.: A novel method for a fractional derivative with non-local and non-singular kernel. Chaos, Solitons Fractals 114, 478–482 (2018)
Hashemi, M.S., Akgül, A.: Solitary wave solutions of time–space nonlinear fractional Schrödinger’s equation: two analytical approaches. J. Comput. Appl. Math. 339, 147–160 (2018)
Modanli, M., Akgül, A.: Numerical solution of fractional telegraph differential equations by theta-method. Eur. Phys. J. Special Top. 226, 3693–3703 (2017)
Lin, Y., Yan, L.: Solutions of fractional Konopelchenko-Dubrovsky and Nizhnik-Novikov-Veselov equations using a generalized fractional subequation method. Abstr. Appl. Anal. 2013, 1–7 (2013)
Konopelchenko, B.G., Dubrovsky, V.G.: Some new integrable nonlinear evolution equations in 2 + 1 dimensions. Phys. Lett. A 102, 15–17 (1984)
Zhao, H., Han, J.G., Wang, W.T., An, H.Y.: Abundant multisoliton structures of the Konopelchenko–Dubrovsky equation. Czechoslovak J. Phys. 56(12), 1381–1388 (2006)
Abdou, M.A.: Generalized solitonary and periodic solutions for nonlinear partial differential equations by the Exp-function method. Nonlinear Dyn. 52(1), 1–9 (2008)
Wang, D.S., Zhang, H.Q.: Further improved F-expansion method and new exact solutions of Konopelchenko–Dubrovsky equation. Chaos, Solitons Fractals 25(3), 601–610 (2005)
Zhang, S.: Symbolic computation and new families of exact non-travelling wave solutions of (2 + 1)-dimensional Konopelchenko–Dubrovsky equations. Chaos, Solitons Fractals 31, 951–959 (2007)
Xia, T.C., Lü, Z.S., Zhang, H.Q.: Symbolic computation and new families of exact soliton-like solutions of Konopelchenko–Dubrovsky equations. Chaos, Solitons Fractals 20, 561–566 (2004)
Wazwaz, A.M.: New kinks and solitons solutions to the (2 + 1)-dimensional Konopelchenko–Dubrovsky equation. Math. Comput. Modell. 45, 473–479 (2007)
Wang, Y., Wei, L.: New exact solutions to the (2 + 1)-dimensional Konopelchenko–Dubrovsky equation. Commun. Nonlinear Sci. Numer. Simul. 15(2), 216–224 (2010)
Bekir, A.: Application of the (G′G)-expansion method for nonlinear evolution equations. Phys. Lett. A 372(19), 3400–3406 (2008)
Song, L., Zhang, H.: New exact solutions for the Konopelchenko–Dubrovsky equation using an extended Riccati equation rational expansion method and symbolic computation. Appl. Math. Comput. 187(2), 1373–1388 (2008)
Zhang, H.Q., Tian, B., Li, J., Xu, T., Zhang, Y.X.: Symbolic-computation study of integrable properties for the (2 + 1)-dimensional Gardner equation with the two-singular manifold method. IMA J. Appl. Math. 74, 46–61 (2009)
Jumarie, G.: Table of some basic fractional calculus formulae derived from a modified Riemann–Liouville derivative for non-differentiable functions. Appl. Math. Lett. 22, 378–385 (2009)
Jumarie, G.: The Leibniz rule for fractional derivatives holds with non-differentiable functions. Math. Stat. 1(2), 50–52 (2013)
Ryabov, P.N., Sinelshchikov, D.I., Kochanov, M.B.: Application of the Kudryashov method for finding exact solutions of the high order nonlinear evolution equations. Appl. Math. Comput. 218, 3965–3972 (2011)
Kudryashov, N.A.: One method for finding exact solutions of nonlinear differential equations. Commun. Nonlinear Sci. Numer. Simul. 17(6), 2248–2253 (2012)
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
This article is part of the topical collection “Recent Advances in Mathematics and its Applications” edited by Santanu Saha Ray.
Rights and permissions
About this article

Cite this article
Gupta, A.K. On the Exact Solution of Time-Fractional (2 + 1) Dimensional Konopelchenko–Dubrovsky Equation. Int. J. Appl. Comput. Math 5, 95 (2019). https://doi.org/10.1007/s40819-019-0678-z
Published:
DOI: https://doi.org/10.1007/s40819-019-0678-z