
Abstract
This article introduces a delayed HIV model arising out of incorporating the intracellular delay. It has been assumed that intracellular delay \(\tau \) is constant and some of the infected T cell actually dies out due to infection and only a portion of infected T cell which remain alive a time lag of \(\tau \) after infection will produce newly HIV particles. The mathematical analysis on the present model suggests that infection free equilibrium is still always possible. The endemic equilibrium point exists if number of virus particle produced is greater than \(e^{\delta _2 \tau }\) and \(\delta _3 < {\overline{\delta _3}}\), where \(\delta _2\) and \(\delta _3\) are the mortality rate of infected T cell and virus respectively. The local stability analysis and Hopf Bifurcation analysis have been carried out on the proposed model and same supported by numerical simulation. The proposed model exhibit some interesting dynamical behaviour of the HIV infection.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
The emergent of AIDS is considered to be one of the most dangerous disease in the history of mankind. This unique disease targets the immune system of the human thereby decreasing the potential of human to fight for the other disease and eventually result in death. In the study of the AIDS, the most important component of the body of human is immune system composed of CD4\(^{+}\) T cell, is a type of lymphocytes or simply white blood cells [20]. On the other hand, Human Immunodeficiency Virus or HIV is class of virus which invades the immune system or simply it infects the healthy T Cell. These T Cells are commonly regarded as helper T cells as these cells inhibit the key factors for the production of other cell populations in the immune system. For a normal and healthy person, the nominal CD4\(^{+}\) T Cell count varies around 1000 mm\(^{-3}\). When it decreases to a value around 200 mm\(^{-3}\), the person is regarded as having AIDS [22]. Healthy T cells inside the body usually die and again grow due to its internal mechanism and therefore it is possible that the may infection may lead to hampering of the mechanism which controls the development of new T Cell thereby decreasing its overall count. The sharp decline in the T cell count is not clearly explained. There are also other peculiar features of HIV infections such as the time lag of approximately 10 years lag between the instant of infection and onset of AIDS and this time lag is not clearly explained as yet. All this properties of infection is because of the importance of the CD4\(^{+}\) T Cell count in immune regulation. Although, there are many intermediate process through which, a healthy person can exhibits AIDS, but broadly there are three main stages of HIV infection, viz. primary infection stage or acute symptom phase, chronic infection phase or latency phase and finally AIDS. A perfect mathematical model should be able to explain all the three phase characteristics of HIV dynamics. The literatures of mathematical model in HIV are abundant but a very few have been able to model all the three phases of the HIV dynamics.
The mathematical model can be of great use in these kind of situation which requires a lot of investments to carry out in-vivo analysis. There has been some remarkable studies of HIV model using mathematical models and the governing models have been able to explain a lot of properties of virus dynamic inside human [1, 2, 5, 9, 11, 18, 19, 21, 24, 26, 28]. The pioneer review work by Perelson et al. [22] is worth mentioning. They have given a very good account of different mathematical model and their worthiness to understand virus dynamics in details. Their works also explain some of the drug therapy model of HIV dynamics which are most prominent one [29, 30]. However, they have not given any history of delayed mathematical model which are available in literature. It is well established in literature that delay can have very pronounced effects on stability of mathematical model [12, 27]. There are in fact quite a number of delayed HIV model which gives good insight for the understanding of the Virus dynamics. Li et al. [13] have proposed a FDE model incorporating delay as the time between instant of infection and infected T cell starts producing virus and they have shown that delay can sometimes do not have any impact on the asymptotic stability of infected equilibrium state. Similarly, other authors have also proposed their DDE of HIV infection [1, 6, 7, 15, 17, 25]. Some of the authors have taken intracellular delay into account and studies their dynamical behaviour [14, 16, 23].
The proposed mathematical model incorporates the intracellular delay into account and studies the its implication on the long term dynamics of HIV infection. The model assume a simple logistic proliferation of healthy T cell and assumes that death of the infected T cell follows exponential distribution. It has been shown that the intracellular delay and other key parameter in the model can leads to variety of rich dynamics of HIV model which other model lacks.
The Proposed Model
Let \(u_1\), \(u_2\) and \(u_3\) denotes the number of healthy T cells, infected T cells and HIV particle in the system. The basic growth dynamics of healthy CD4\(^+\) T cells in humans can be approximately assumed to follow the logistic type growth model. If Q represents the rate at which new CD4\(^+\) T cells are created by the body and at the same time it can also proliferate to give new T cell, then overall growth rate can be modelled by \( Q + \alpha u_1\left( 1-\frac{u_1}{K}\right) \) where K represents the maximum level of T cell at which proliferation shut off and \(\alpha \) being proliferation rate of T cell. Also, it is more logical to think of natural death rate \(\delta _1\) of T cell and may be assumed to be constant so that overall dynamics in absence of HIV can be described as
In the presence of HIV, CD4\(^+\) T cell is assumed to follow law of mass-action type interaction and therefore interaction between virus and T cell is given by \(\beta u_1 u_3\), \(\beta \) being rate of infection. Keeping this in mind, the T cell dynamics can now be written as:
For infected T cell, the argument is as follows. It is assumed that there is a delay due to intracellular delay \(\tau \) which is the time span between the instant of interaction between the healthy T cell and virus; and emergence of infected T cell as a result of interaction. During this time lag, some of the T cell will actually die out and only those T cell which remains alive after this time from the instant of infection will take part in the dynamics of the infected T cell. In this time span, it is assumed that number of infected T cell follows exponential distribution i.e if \(\delta _2\) is the natural death rate of infected T cell then the total number of infected T cell at time ’t’ is the sum of all the infected cell at previous time [3, 10, 23] i.e.
In order to write the above equation in differential form, change the variable by using the linear transformation \(t-T=\phi \), then the above relation takes the form,
For the dynamics of the virus, it is assumed that the after infection, the helper T cell produce N copies of virus which will infect other helper T cells. The death rate of healthy T cell is equal to \(e^{-\delta _2 T}\beta u_1(t-T) u_3(t-T)\) and total number of virus produced with this death is \(N e^{-\delta _2 T}\beta u_1(t-T) u_3(t-T)\). The natural mortality rate \(\delta _3\) of virus is also assumed and it is constant. The balanced equation for virus dynamics can be thus modelled by the following law,
Hence, the proposed model for HIV infection in terms of rate law is assumed to be governed by the equation:
where \(N \ge 1\), \(\tau \in \left( 0,\infty \right) \), \(\delta _i \in \left[ 0, \infty \right) \), \(Q,\alpha , \beta , K \in \mathbb {R}_{+}=(0,\infty )\). The initial conditions for the above system is defined by
\(\theta \in [-\tau , 0]\), \(\phi _i(\theta ) \in C([-\tau , 0])\), the set of all continuous functions defined on interval \([-\tau , 0]\). The model being a biological model, the conditions \(\phi _i(\theta ) \ge 0\), \(\phi _i(0) > 0\), \(i=1,3\) are further imposed so that the model system (1) is biologically feasible.
Some Preliminary Results
Theorem 1
All solutions of the system (1) remain positive for all time \(t \ge 0\) if initial history \(u_1(0), u_2(0)\) and \(u_3(0)\) are positive.
Proof
As \(Q>0\), the fist equation of (1) gives
Therefore, separating variable \(u_1\) and integrating the inequality gives
which proves that \(u_1(t)\) remains positive as long as \(u_1(0)\) is positive and thus proving its positively invariant properties.
For proving positively invariant of \(u_3\), consider the interval \(\left[ 0, \tau \right] \) in which using the positivity of \(\phi _1(\theta )\) and \(\phi _3(\theta )\),
Hence, in \(\left[ 0, \tau \right] \), third equation of (1) gives
Therefore, separating variable \(u_3\) of Eq. (6) and then integration yields
Similarly, in \(\left[ \tau , 2\tau \right] \) and using positivity of \(u_3(t)\) on \(\left[ 0, \tau \right] \) and third equation of (1) again gives differential inequality (6) which on separating variable \(u_3\) and then integration yields
Continuing in this way, the above technique can be easily generalised to any finite interval [0, t] and this proves that \(u_3(t)\) remains positive for all \(t \ge 0\).
Now, to prove positivity of \(u_2(t)\), consider the relation of \(u_2\),
Since the quantities \(\beta \), \(e^{-\delta _2 T }\), \(u_1\left( t-T \right) \) and \(u_3\left( t-T \right) \) are all positive for \(T \in [0,\tau ]\), the integrand is the integral (9) is positive and hence by property of definite integral, integral will also remain positive for all time t. Therefore positivity of \(u_1\) and \(u_3\) proved earlier gives the positivity of \(u_2(t)\). Hence, all solutions of (1) is positively invariant. \(\square \)
Lemma 1
For the differential inequality
the solution satisfies
and therefore
Proof
Note that for the first order equation
the integrating factor is \(e^{at}\). Therefore multiplying both sides of differential inequality (10) gives the exact differential
On integrating both sides within [0, t],
which on some manipulation gives the required inequality. Again taking the limit \(t \rightarrow \infty \), the final form of solution can be obtained. \(\square \)
Theorem 2
If the solutions of the system (1) are positively invariant, then all the solution are also ultimately bounded in the domain
Proof
Let \(\varOmega =K(\alpha -\delta _1)+\sqrt{K^2 \left( \alpha -\delta _1\right) {}^2+4 \alpha K Q}\) which is always positive for all values of the parameters. On solving for \(u_1\) from equation
\(u_1=\frac{\varOmega }{2 \alpha }\), and for this value the first equation of (1) gives,
Therefore positivity of \(u_1\) and \(u_3\) in Eq. (15) implies that maximum value of \(u_1\) that can be achieved is \(\frac{\varOmega }{2 \alpha }\), since the rate \(\frac{du_1}{dt}<0\) and so,
Again, on adding first two equations,
where \(\delta =\min \lbrace \delta _1,\delta _2\rbrace \) and therefore applying Eq. (11) of Lemma 1 gives,
Similarly,
where \(\delta ^{*}=\min \lbrace \delta _1,\delta _2, \delta _3\rbrace \) and this again, on applying Eq. (11) of Lemma 1 gives
Combining Eqs. (16)–(18), it is established that the solution of the system is ultimately bounded in the domain \(\varSigma \). \(\square \)
Mathematical Analysis
Then, the system (1) permits two equilibrium points:
-
1.
a unique disease free equilibrium point \(E_0\left( {\bar{u}}_1,0,0\right) \), where always exists and
$$\begin{aligned} {\bar{u}}_1=\frac{\varOmega }{2 \alpha } \end{aligned}$$ -
2.
and a unique endemic equilibrium point \(E_1\left( {\tilde{u}}_1,{\tilde{u}}_2,{\tilde{u}}_3\right) \) which exits if
$$\begin{aligned} N>e^{\delta _2 \tau } \text { and } \delta _3< \frac{\varOmega \beta {\left( Ne^{-\delta _2 \tau }-1\right) }}{2 \alpha } \end{aligned}$$and the values of the coordinates of this equilibrium point are
$$\begin{aligned} {\tilde{u}}_1= & {} \frac{\delta _3 e^{\delta _2 \tau }}{\beta \left( N- e^{\delta _2 \tau }\right) } \\ {\tilde{u}}_3= & {} \frac{\alpha -\delta _1}{\beta }-\frac{\alpha \delta _3 e^{\delta _2 \tau }}{\beta ^2 K \left( N-e^{\delta _2 \tau }\right) }+\frac{Q \left( N e^{-\delta _2 \tau }-1\right) }{\delta _3}\\ {\tilde{u}}_2= & {} \frac{\beta \left( 1-e^{- \delta _2 \tau } \right) }{\delta _2 } {\tilde{u}}_1 {\tilde{u}}_3 \end{aligned}$$
Local Stability of \(E_0\)
To study the stability behaviour of the disease free equilibrium point, first it is required to have linearised system around \(\left( {\bar{u}}_1,0,0\right) \) which is
Therefore, corresponding transcendental characteristic equation is given by
The two eigenvalues can be readily obtained as \(-\delta _2\) and \(\alpha - \delta _1- \frac{\varOmega }{K}\) which are always negative since \(\varOmega =K(\alpha -\delta _1)+\sqrt{K^2 \left( \alpha -\delta _1\right) {}^2+4 \alpha K Q}> K(\alpha -\delta _1)\) i.e. \(\alpha < \delta _1+ \frac{\varOmega }{K}\). So stability can be achieved if the equation
permits only roots having negative real parts. The following theorem gives the sufficient condition for disease free equilibrium point to be locally stable.
Theorem 3
If \(\delta _3> \frac{(N-1)\beta \varOmega }{2 \alpha }\), then disease free equilibrium point \(\left( {\bar{u}}_1,0,0\right) \) is always locally stable for all values of delay parameter \(\tau \).
Proof
Assume that equilibrium point \(\left( {\bar{u}}_1,0,0\right) \) of system (1) is stable at \(\tau =0\), which means that Eq. (20) at \(\tau =0\) have all roots having negative real part i.e.
which gives \(\delta _3> \frac{\left( N-1\right) \beta \varOmega }{2 \alpha }\). Now assume that \(\tau \) is continuously varied in positive direction so that there exists a value of \(\tau ^{*}\) at which one pair of purely imaginary eigenvalue emerges say \(\lambda =\pm i \rho , \rho >0\). Therefore, substituting \(\lambda =\pm i \rho , \rho >0\) in Eq. (20),
The above equation leads to the following system of equation in \(\sin \tau \rho \) and \(\cos \tau \rho \).
On eliminating \(\sin \tau \rho \) and \(\cos \tau \rho \), the \(\rho \) is given by the equation
Form Eq. (21), it can be deduced easily that \(\rho ^2<0\) always if \(\delta _3> \frac{\left( N-1\right) \beta \varOmega }{2 \alpha }\) and this proves the theorem. \(\square \)
Basic Reproduction Number \(R_0\) and Stability Conditions
For the proposed model (1), the basic reproduction number can be defined by
With the above definition of basic reproduction number, the following theorem concerning the stability of infection free equilibrium point \(E_0\) and existence of disease equilibrium point can be stated.
Theorem 4
If \(R_0<1\), then disease free equilibrium point \(E_0\) is always locally stable for all values of delay parameter and if \(R_0>1\), then endemic equilibrium points exists.
Proof
It is very clear from the definition and proof of Theorem (3) that if \(\frac{\varOmega \beta {\left( Ne^{-\delta _2 \tau }-1\right) }}{2 \alpha \delta _3}<1\), then all conditions of theorem remains valid. Moreover, the condition \(\frac{\varOmega \beta {\left( Ne^{-\delta _2 \tau }-1\right) }}{2 \alpha \delta _3}>1\) is the one of the conditions for existence of positive equilibrium point. The other condition for existence follows since for \(R_0>1\), \(N>e^{\delta _2 \tau }\). \(\square \)
The basic reproduction number \(R_0\) gives also the global stability conditions which is clear from the following conditions
Theorem 5
If \(R_0<1\), then disease free equilibrium point \(E_0\) is always globally stable for all values of delay parameter. On the contrary if \(R_0>1\), then \(E_0\) is unstable and in this case, endemic equilibrium points exists.
Proof
Consider the following Lyapunov function
where \(u_1^t(\theta )=u_1(\theta +t)\) and \(u_3^t(\theta )=u_3(\theta +t)\) for \(\theta =[-\tau ,0]\). Then the time differential of above function gives,
Thus if \(R_0<1\), \(L'\left( u_1^t,u_2(t),u_3^t\right) <0\), and hence \(E_0\) is globally asymptotically stable. Moreover, if \(R_0>1\) then from the fact that \(R_0={\bar{u}}_1/{\tilde{u}}_1\), \(E_1\) will exists and \(E_0\) will be unstable in this case. \(\square \)
Local Stability of \(E_1\) and Hopf Bifurcation Analysis
The characteristic equation of the Jacobian matrix at the endemic equilibrium point \(\left( {\tilde{u}}_1,{\tilde{u}}_2,{\tilde{u}}_3\right) \) is
where the coefficients are given by the following:
To begin the bifurcation analysis of the system, first it is assume that \(\tau =0\) in Eq. (22) in such a way that it gives all root of Eq. (22) having negative real part. At this point, the theorem by Routh–Hurwitz can be applied to get the desired conditions for roots of Eq. (22) having negative real part and hence, the stability of algebraic polynomial of Eq. (22). On applying the Routh-Hurwitz theorem, the following conditions are obtained
As the delay parameter \(\tau \) is continuously increased from \(\tau =0\), some of the roots with negative real part in left half complex plane shift to right half complex plane. This way the endemic equilibrium point will become unstable. The condition for Hopf Bifurcation is that the equation should permits at least one root with positive part as the bifurcation parameters are continuously varied. This is possible if the roots of equation also permits the root with zero real parts by By Rouche’s Theorem. Therefore assume that \(\lambda =i w \) at some value of parameter \(\tau \) say \(\tau _{cr}\). Putting this in Eq. (22), the following equation in w is obtained.
For Hopf bifurcation to take place, the Eq. (24) should have at least one real root. Since the delay \(\tau _{cr}\) is present explicitly in Eq. (24), this makes almost impossible to calculate the value of critical value \(\tau _{cr}\) of the parameter in usual way. In 2002, Beretta et al. [4] proposed a geometric switch criteria for the calculation of critical value of delay parameter in such kind of delay dependent parameter system. Without any loss of generality, the following theorems and lemma are given on which this technique are based. Since the delay are explicitly occurs in the system as one of the parameter, it is assumed that the characteristic equation of system (1) is
with
where coefficients are given by
It should be noted that the coefficients \(a_{ij}\) in above defined functions R and S are functions of delay parameter \(\tau \). Now, for the given system (1), the positive equilibrium point exists if
In order to ascertain the stability switch criteria, the function R and S define above must fulfil some conditions which are listed below
Lemma 2
Assume \(\tau \in \left[ 0, \tau _m \right) \) with \(\tau _m=\min \left\{ \frac{1}{\delta _2}\ln \left( \frac{N \varOmega \beta }{\varOmega \beta +2 \alpha \delta _3}\right) ,\frac{\ln N }{\delta _2} \right\} \) and R and S satisfy the following conditions:
-
1.
\(\lambda =0\) is not a zero of \(\varPhi (\lambda , \tau )\), i.e. \(R(0,\tau )+S(0,\tau )\ne 0\),
-
2.
If \(\lambda =i \omega \), then \(\varPhi (i \omega , \tau )=R(i \omega ,\tau )+S(i \omega ,\tau )\ne 0\),
-
3.
\(\limsup \left\{ \left| \frac{ S(\lambda ,\tau )}{R(\lambda ,\tau )}\right| : \vert \lambda \vert \rightarrow \infty , \mathfrak {R}\,\lambda \ge 0\right\} <1 \) for any \(\tau \),
-
4.
\(F(\omega , \tau )=\vert R(i \omega , \tau ) \vert ^2 -\vert S(i \omega , \tau )\vert ^2\) has at most finite number of real zeros for any \(\tau \),
-
5.
All positive roots \(\omega (\tau )\) of \(F(\omega , \tau )=0\) is continuously differentiable functions of \(\tau \) if it exists.
Proof
Observe that
-
1.
Hence \(R(0,\tau )+S(0,\tau )=a_{13}+a_{23}=a_3+e^{-\delta _2 \tau }b_3 \ne 0\), therefore \(\lambda =0\) is obviously not a zero of \(\varPhi (\lambda , \tau )\).
-
2.
Secondly it can be easily verified that \(R(i \omega ,\tau )+S(i \omega ,\tau )\ne 0\).
-
3.
Since, \(\left| \frac{ S(\lambda ,\tau )}{R(\lambda ,\tau )}\right| =\left| \frac{a_{21} \lambda ^2+a_{22}\lambda +a_{23}}{\lambda ^3+a_{11}\lambda ^2+a_{12} \lambda +a_{13}}\right| \rightarrow 0\) as \(\vert \lambda \vert \rightarrow \infty \), hence
\(\limsup \left\{ \left| \frac{ S(\lambda ,\tau )}{R(\lambda ,\tau )}\right| : \vert \lambda \vert \rightarrow \infty , \mathfrak {R}\,\lambda \ge 0\right\} <1 \).
-
4.
Now a usual calculation yields that
$$\begin{aligned} F(\omega , \tau )= & {} \omega ^6+\left( a_{11}^2-a_{21}^2-2 a_{12}\right) \omega ^4\nonumber \\&+\left( a_{12}^2-a_{22}^2-2 a_{11} a_{13}+2 a_{21} a_{23}\right) \omega ^2+\left( a_{13}^2-a_{23}^2\right) \end{aligned}$$(29)which being a purely algebraic polynomial has at most six zeros i.e. \(F(\omega , \tau )\) has finite number of zeros for all \(\tau \).
-
5.
As, the coefficients \(a_{ij}\) in \(F(\omega , \tau )\) are all continuous functions of \(\tau \), therefore all zeros \(\omega ( \tau )\) of \(F(\omega , \tau )\) are continuously differentiable functions of \(\tau \). \(\square \)
For the assumptions of the theorem regarding the stability switch, define the interval I as follows,
Further, let
where, \(\omega ( \tau )\) is a positive root of \(F(\omega , \tau )=0\) and \(\theta (\tau )\in [0, 2\pi ]\) is solution of equations
The following theorem can now be stated which gives a way to find the critical value of \(\tau \) for which Hopf bifurcation [8, 12] occurs in the system.
Theorem 6
Assume that the \(\omega ( \tau )\) is a positive zero of the function \(F(\omega , \tau )\) for \(\tau \in I\) and there exists a \(\tau _{cr}\in I\) such that for some values of \(n=0,1,2,\ldots ,\)
then a purely simple conjugate pair of imaginary roots \(\pm \omega (\tau _{cr})\) of characteristic Eq. (22) exists at \(\tau =\tau _{cr}\) which transverse the imaginary axis from left to right or right to left according as \(\chi (\tau _{cr})>0\) or \(\chi (\tau _{cr})<0\) where
Proof
For proof, the reader may consult Berreta et al. [4]. \(\square \)
In the following section, the existence of Hopf bifurcation and critical value of bifurcation parameter \(\tau _{cr}\), is explored through numerical calculation. The other nonlinear properties of the system such as multi periodic oscillations and chaotic attractors are also explored.
Computer Simulations
For the numerical computations of the system, the following set of parameters which can be found in literatures [6, 22, 28] have taken for bifurcation analysis of the system.
For the above parametric values, the system has positive equilibrium point for all values of parameter \(\tau \in [0,102.158]\). On plotting the \(S_n(\tau )\) for various values of n, versus delay parameter \(\tau \), the stability switches can be determine. Figure 1 shows the existence of positive roots of \(F(\omega , \tau )=0\) as \(\tau \) is varied and accordingly the Fig. 2 can be drawn for \(S_n(\tau )\) versus \(\tau \). It is obvious from Fig. 2 that there are in fact 22 values of \(\tau \) at which stability switch occurs but the system is stable in the interval \(\tau \in [0,\tau _1) \cup (\tau _{22},\tau _m)\) and unstable or periodic oscillation exists in \(\tau \in (\tau _1,\tau _{22})\) with \(\tau _1=14.845406\), \(\tau _{22}=72.927895\) and \(\tau _m=102.157591\).

Positive roots of \(F(\omega , \tau )=0\)

Plot of \(S_n(\tau )\) for \(n=0,1,2,\ldots ,19\)
Moreover, the bifurcation at \(\tau =\tau _1\) is forward and at \(\tau =\tau _{22}\) is backward since \(\chi (\tau _{1})>0\) and \(\chi (\tau _{22})<0\) respectively (using Figs. 3, 4). The time series plot for different values of \(\tau \) are shown in Figs. 5, 6 and 7.

Plot of \(S_n(\tau )\) for \(n=0,10,11\)

Plot of derivative of \(F(\omega , \tau )\)

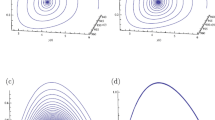
Time series and phase plot diagram for \(\tau =10\) showing stability behaviour. a Time series plot for \(u_1\), b time series plot for \(u_2\), c time series plot for \(u_3\), d phase plot in \(u_1\), \(u_2\) plane

Time series and phase plot diagram for \(\tau =15\) showing stability behaviour. a Time series plot for \(u_1\), b time series plot for \(u_2\), c time series plot for \(u_3\), d phase plot in \(u_1\), \(u_2\) plane

Time series and phase plot diagram for \(\tau =80\) showing stability behaviour. a Time series plot for \(u_1\), b time series plot for \(u_2\), c time series plot for \(u_3\), d phase plot in \(u_1\), \(u_2\) plane
The further nonlinear properties of the proposed model is explored by drawing bifurcation diagram of the system w.r.t. to important parameters such as \(\alpha \), \(\beta \), \(\delta _1\), \(\delta _2\), \(\delta _3\), N and \(\tau \). It may be observed from the following bifurcation diagrams and sensitivity analysis that the system possess variety of dynamical properties which includes periodic, multi-periodic, quasi periodic and chaotic behaviour.
The first bifurcation diagram shown in Fig. 8 shows the system behaviour with respect to intrinsic growth rate i.e. \(\alpha \) or T cell proliferation rate. It is observed that for lower and higher value of \(\alpha \), the system is chaotic but it has multi-periodic window in the range \(\alpha \in (6.6, \,9.0)\).

Bifurcation diagram with respect to \(\alpha \)
The second bifurcation diagram w.r.t. parameter \(\beta \) shows two chaotic windows with single and multi-periodic windows in between for \(\beta =(0,0.004)\), see Fig. 9. The other bifurcation diagrams (Figs. 10, 11, 12, 13, 14, 15) also have some chaotic windows with single/multi periodic window. The chaotic window in above bifurcation diagram can easily be identified by checking the system towards sensitivity to initial conditions as depicted in Fig. 16.

Bifurcation diagram with respect to \(\beta \)

Bifurcation diagram with respect to \(\delta _1\)

Bifurcation diagram with respect to \(\delta _2\)

Bifurcation diagram with respect to \(\delta _3\)

Bifurcation diagram with respect to N

Bifurcation diagram with respect to Q

Bifurcation diagram with respect to \(\tau \)

Sensitivity towards initial conditions
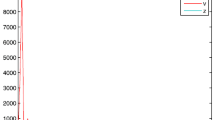
The proposed model also explain the one property of HIV infection in human where the symptoms of HIV infection can be seen after one year as depicted in Fig. 17a, b. The emergence of HIV is obvious as the virus concentration shoots up abruptly after 600 days of infection. The CD4\(^{+}\) T cell counts also falls sharply and it oscillates around 400 which is clear sign of AIDS.

Time series plot of \(u_1\) and \(u_3\)

Time series plot of \(u_1\) and \(u_3\) with different values of Q. a \(Q = 0\), b \(Q = 50\), c \(Q = 100\), d \(Q = 150\), e \(Q = 200\), f \(Q = 250\)
Remarks
This article introduces a intracellular delay model for the HIV model by assuming a time lag between the instant of infection and the death of infected CD\(^+\) T cell. The number of infected T cell also follow exponential distribution. The resulting model as a result posses two unique equilibrium point namely a disease free equilibrium point and a endemic equilibrium point. Further analysis of the model suggest that the endemic equilibrium point exists only if the number virus particle produced by one CD4\(^+\) T cell and death rate of HIV particle satisfy the following relation:
The above two relations gives a bound on \(\tau \), as \(\tau \in \left[ 0, \tau _m \right) \) with
Therefore there exists a upper limit on the value of intracellular delay which can lead to endemic equilibrium point or in biological term, the emergence of AIDS.
The bifurcation diagrams plotted against model parameters reveals a lot of dynamical properties such as periodic, quasi-periodic and chaotic behaviour. The chaotic behaviour here signify that the system is highly sensitive to the initial perturbation and different people will show different T Cell count and viral load in HIV infections under same set of conditions.
One of the main property of HIV infection is that the people shows symptoms after about year or so which is clearly explained by the the proposed model as depicted in Fig. 17. The number of helper cell initially maintaining a level which is regarded as latency phase. In this phase, the viral load is also low, but once this phase is over, viral concentration starts to increase while the CD4\(^{+}\) T cell count sharply decreases, and keeps on oscillating. In this oscillation, there are times where CD4\(^{+}\) cell count falls below 200 mm\(^{-3}\) which is a clear sign of full blown AIDS and the patient can succumb to HIV infection finally.
If somehow, CD\(^{+}\) cell count can be constantly supplied, the person can have chance of survival. This can be clearly observed in Fig. 18, as the rate of influx of T cell have stabilising behaviour on the viral infection.
References
Anderson, R.M.: Mathematical and statistical studies of the epidemiology of HIV. AIDS 3(6), 333–346 (1989)
Bailey, J.J., Fletcher, J.E., Chuck, E.T., Shrager, R.I.: A kinetic model of CD4\(^+\) lymphocytes with the human immunodeficiency virus (HIV). BioSystems 26(3), 177–183 (1992)
Beretta, E., Kuang, Y.: Modeling and analysis of a marine bacteriophage infection with latency period. Nonlinear Anal. Real World Appl. 2(1), 35–74 (2001)
Beretta, E., Kuang, Y.: Geometric stability switch criteria in delay differential systems with delay-dependent parameters. SIAM J. Math. Anal. 33(31), 144–1165 (2002)
Brauer, F., Castillo-Chavez, C., Castillo-Chavez, C.: Mathematical Models in Population Biology and Epidemiology, vol. 40. Springer, New York (2001)
Culshaw, R.V., Ruan, S.: A delay-differential equation model of HIV infection of CD4\(^+\) T-cells. Math. Biosci. 165(1), 27–39 (2000)
Culshaw, R.V., Ruan, S., Webb, G.: A mathematical model of cell-to-cell spread of HIV-1 that includes a time delay. J. Math. Biol. 46(5), 425–444 (2003)
Hale, J.K., Lunel, S.M.V.: Introduction to Functional Differential Equations. Springer, New York (1993)
Hraba, T., Doležal, J., čelikovský, S.: Model-based analysis of CD4\(^+\) lymphocyte dynamics in HIV infected individuals. Immunobiology 181(1), 108–118 (1990)
Hristov, J.: Transient heat diffusion with a non-singular fading memory: from the Cattaneo constitutive equation with Jeffrey’s kernel to the Caputo-Fabrizio time-fractional derivative. Therm. Sci. 20, 19 (2016)
Kirschner, D.E., Webb, G.F.: A mathematical model of combined drug therapy of HIV infection. Comput. Math. Methods Med. 1(1), 25–34 (1997)
Kuang, Y.: Delay Differential Equations: With Applications in Population Dynamics. Academic Press, Boston (1993)
Li, D., Ma, W.: Asymptotic properties of a HIV-1 infection model with time delay. J. Math. Anal. Appl. 335(1), 683–691 (2007)
Li, M.Y., Shu, H.: Impact of intracellular delays and target-cell dynamics on in vivo viral infections. SIAM J. Appl. Math. 70(7), 2434–2448 (2010)
Mittler, J.E., Sulzer, B., Neumann, A.U., Perelson, A.S.: Influence of delayed viral production on viral dynamics in HIV-1 infected patients. Math. Biosci. 152(2), 143–163 (1998)
Nelson, P.W., Murray, J.D., Perelson, A.S.: A model of HIV-1 pathogenesis that includes an intracellular delay. Math. Biosci. 163(2), 201–215 (2000)
Nelson, P.W., Perelson, A.S.: Mathematical analysis of delay differential equation models of HIV-1 infection. Math. Biosci. 179(1), 73–94 (2002)
Nowak, M., May, R.M.: Virus Dynamics: Mathematical Principles of Immunology and Virology: Oxford University Press, New York (2000)
Nowak, M.A., Bangham, C.R.: Population dynamics of immune responses to persistent viruses. Science 272(5258), 74–79 (1996)
Perelson, A.S.: Modelling viral and immune system dynamics. Nat. Rev. Immunol. 2(1), 28–36 (2002)
Perelson, A.S., Kirschner, D.E., De Boer, R.: Dynamics of HIV infection of CD4\(^+\) T cells. Math. Biosci. 114(1), 81–125 (1993)
Perelson, A.S., Nelson, P.W.: Mathematical analysis of HIV-1 dynamics in vivo. SIAM Rev. 41(1), 3–44 (1999)
Sahani, S.K.: Effects of intracellular delay and immune response delay in HIV model. Neural Parallel Sci. Comput. 23, 357–366 (2015)
Smith, H.L., De Leenheer, P.: Virus dynamics: a global analysis. SIAM J. Appl. Math. 63(4), 1313–1327 (2003)
Song, X., Cheng, S.: A delay-differential equation model of hiv infection of CD4\(^+\) T-cells. J. Korean Math. Soc. 42(5), 1071–1086 (2005)
Stafford, M., Cao, Y., Ho, D.D., Corey, L., Perelson, A.S.: Modeling plasma virus concentration and CD4\(^+\) T cell kinetics during primary HIV infection. No. 99-05-036 (1999)
Sun, Z., Xu, W., Yang, X., Fang, T.: Effects of time delays on bifurcation and chaos in a non-autonomous system with multiple time delays. Chaos Solitons Fractals 31(1), 39–53 (2007)
Wang, L., Li, M.Y.: Mathematical analysis of the global dynamics of a model for HIV infection of CD4\(^+\) T cells. Math. Biosci. 200(1), 44–57 (2006)
Wein, L.M., Zenios, S.A., Nowak, M.A.: Dynamic multidrug therapies for HIV: a control theoretic approach. J. Theor. Biol. 185(1), 15–29 (1997)
Wodarz, D., Nowak, M.A.: Mathematical models of HIV pathogenesis and treatment. BioEssays 24(12), 1178–1187 (2002)
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Sahani, S.K. A Delayed Model for HIV Infection Incorporating Intracellular Delay. Int. J. Appl. Comput. Math 3, 2303–2322 (2017). https://doi.org/10.1007/s40819-016-0190-7
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40819-016-0190-7