
Abstract
In this paper, cubic polynomial spline based functions are used for the approximate solutions of fractional boundary value problems (FBVPs). Left and right sided Caputo’s fractional approaches are used for the fractional derivative. Convergence analysis of this method is also presented. Numerical examples are given to illustrate the accuracy and efficiency of this method and comparison show that this scheme is more accurate than the existing method (Rehman and Khan in Appl Math Model 36:894–907, 2012).
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
The topic of fractional calculus has gain considerable attention in the last few years. Fractional derivatives and fractional integrals provide more accurate systems’s models in various applications. Analysis and numerical approximate solutions of fractional differential equations with various types of initial and boundary conditions gain interest due to its numerous applications [1–5]. In this paper, Caputo’s fractional derivative is used. This operator is widely applied in modelling of the material’s mechanical properties [6], modelling of the viscoelastic behaviour, signal processing [7], diffusion problems [8], bioengineering and mathematical finance models [9] etc. The existence and uniqueness of the solution of two-point boundary value problem of fractional order can be seen in [10–13]. Akram and Tariq established the exponential spline method to compute approximate solution for FBVP [14].
Many authors used the spline technique to establish the accurate and efficient numerical schemes for solution of boundary value problems (BVPs). For example, Siddiqi and Akram constructed many numerical schemes with help of different spline functions such as polynomial splines and non-polynomial splines for the solution of eighth and tenth order BVPs [15, 16].
In this paper, consider the following FBVP:
subject to
where A and B are real constants. Also f(x) is continuous function on the interval [a, b] and \(D^{\alpha }\) denotes fractional derivative in Caputo’s sense. The left and right sided Riemann-Liouville fractional integral operator of order \(\alpha \) is:
and
respectively. The right and left sided Caputo’s fractional derivative of order \(\alpha \) is defined as
and
respectively, where \(D^{m}\) is ordinary differential operator.
If \(\alpha >0\), \(m-1\le \alpha <m\), \(\delta >-1\), \(m \in \mathbb {N}\), \(\lambda , \mu \in \mathbb {R}\) and y(x) is continuous function, then the following results hold:
For more properties of fractional derivatives, we refer to [17–19].
The main aim of this work is that to establish a numerical scheme using polynomial spline functions. The paper is organized as follows: In section “Polynomial Spline”, cubic polynomial spline functions based methods are developed for the solutions of FBVPs with right Caputo’s operator and left Caputo’s operator. The matrix form of the proposed scheme is discussed in section “Matrix Form of the Method”. In section “Convergence Analysis”, the convergence analysis of method is presented. In section “Numerical Experiments”, two examples are given to illustrate the efficiency of the method. Also the numerical results of suggested scheme is compared with scheme developed in [20] and find that presented method gives better results.
Polynomial Spline
Derivation of the Methods
Let \(x_{i}=a+il\) \((i=0,1,\ldots ,n, \ \ l=\frac{b-a}{n}, \ n>0)\) be grid points of the uniform partition of [a, b] into the subintervals \([x_{i-1},x_{i}]\). Let y(x) be the exact solution of Eq. (1) and \(S_{i}\) be an approximation to \(y_{i} = y(x_{i})\) obtained by the cubic spline function \(\Psi _{i}\) passing through the points \((x_{i} , S_{i})\) and \((x_{i+1}, S_{i+1})\).
The numerical solution of given FBVP is discussed with left differential operator (first case) and secondly with right differential operator (second case).
Numerical Scheme of FBVP with Left Fractional Operator
In this case, FBVP becomes
Consider that cubic spline segment has the following form:
where \(\widehat{a_{i}}\), \(\widehat{b_{i}}\), \(\widehat{c_{i}}\) and \(\widehat{d_{i}}\) are undetermined coefficients. These coefficients are expressed in terms of \(S_{i}\) and \(M_{i}\) as
and are calculated, as
Applying the derivative continuities of order up to the maximum of 2 and using values of the constants, the following consistency relations are obtained as,
The approximations of \(M_{0}\) and \(M_{n}\) in terms of functional values are defined as
and
For \(i=1\) and \(i=n-1\), the consistency relations can be taken as
respectively. Also \(M_{i}\) are taken from Eq. (3), as
where \(f_{i}=f(x_{i})\).
Numerical Scheme of FBVP with Right Fractional Operator
Consider the cubic polynomial spline as,
where \(a_{i}\), \(b_{i}\), \(c_{i}\) and \(d_{i}\) are constants. Now the cubic spline is defined by the following relations:
-
\(S(x)=\Psi _{i}\), \(x\in [x_{i},\ x_{i+1}],\) \(i=0,1,\ldots ,n-1\)
-
\(S(x) \in C^{2}[a,b]\)
In order to obtain the consistency relations in terms of \(S_{i}\) and \(M_{i}\), let
The coefficients introduced in Eq. (8) have the following form:
Applying derivative continuities of order up to the maximum of 2 and using values of the constants, same relations Eqs. (4)–(6) are obtained. Also,
Matrix Form of the Method
Let \(Y=[y_{1},y_{2},\ldots ,y_{n-1}]^{T}\), \(S=[S_{1},S_{2},\ldots ,S_{n-1}]^{T}\), \(M=[M_{1},M_{2},\ldots ,M_{n-1}]^{T}\), \(E = (e_{i})\) and \(T= (\widetilde{t}_{i})\) for \(i=1,2,\ldots ,n-1\) are \((n-1)\) dimensional column vectors.
The Eqs. (4)–(6) in matrix form can be written as,
where \(Z=(z_{ij})\), \(B=(b_{ij})\) are \((n-1)\times (n-1)\) matrices and
and
The system (9) in matrix form have the following form,
where \(W=(w_{ij})\), \(K=(k_{ij})\) are \((n-1)\times (n-1)\) matrices,
and
Moreover, \(F = (f_{i})\) is \((n-1)\) dimensional column vector such that
The Eq. (11) can be written as
From Eqs. (10) and (11), it can be written, as
In order to get a bound on \(\Vert E\Vert _{\infty }\), consider
From Eq. (14), E can be expressed as
Order of Trucation Error
Lemma 1
Let \(y \in C^{6}[a,b]\) then the local trucation errors \(\widetilde{t}_{i}, \ i= 0, 1, \ldots , n-1\) associated with the Eqs. (4)–(6) are
Moreover,
where \(c_{1}\) is a constant and also independent of l.
Convergence Analysis
Lemma 2
[21] If Z is a matrix of order n and \(\Vert Z\Vert <1\), then \((I+Z)^{-1}\) exists and
Lemma 3
The infinite norm of \( W^{-1}\) satisfies the inequality
provided that \(\frac{ l^{2-\alpha }}{2\Gamma (4-\alpha )} < 1.\)
Proof
The matrix W can be written, as
where matrix \(\widetilde{W}=(\widetilde{w_{ij}}) \) is \((n-1)\times (n-1)\) and
The matrix \(W^{-1}\) can be written, as
Using the Lemma 2, if
then
where
From Eq. (17),
\(\square \)
Lemma 4
The matrix \((Z+l^{2}BW^{-1}K)\) in Eq. (14) is nonsingular, provided that:
where \(\lambda _{1}=\frac{1}{8}((b-a)^{2}+l^{2})\), \(\lambda _{2}=2\Gamma (4-\alpha )-l^{2-\alpha }\) and \(c_{2}=\frac{h^{-\alpha }(\Gamma (4-\alpha )-\Gamma (3-\alpha ))}{\Gamma (3-\alpha )\Gamma (4-\alpha )}\). Then
Proof
From Lemma 2,
provided that \(l^{2}\Vert Z^{-1}\Vert _{\infty }\Vert B\Vert _{\infty }\Vert W^{-1}\Vert _{\infty }\Vert K\Vert _{\infty }< 1.\)
As, \(\Vert Z^{-1}\Vert _{\infty } = \frac{l^{-2}}{8}((b-a)^{2}+l^{2})\). Also, \(\Vert B\Vert _{\infty }=1\) and \( \Vert K\Vert _{\infty }=\frac{2l^{-\alpha }(\Gamma (4-\alpha )-\Gamma (3-\alpha ))}{\Gamma (3-\alpha )\Gamma (4-\alpha )}.\) Substitute the values of \(\Vert Z^{-1}\Vert _{\infty }\), \(\Vert B\Vert _{\infty }\), \(\Vert W^{-1}\Vert _{\infty }\) and \(\Vert K\Vert _{\infty }\) in Eq. (20),
\(\square \)
Theorem 1
Let y(x) be the exact solution of the fractional differential equation Eq. (1) with boundary condition Eq. (2) and \(y_{i}, i = 0, 1, 2,\ldots , n-1\), satisfy the discrete BVP Eq. (13). Moreover, if \(e_{i}= y_{i}-S_{i}\), then
Numerical Experiments
Two numerical examples are given to check the accuracy, efficiency and validity of the hyperbolic spline method. All calculations are implemented with MATLAB 7.
Example 4.1
Consider the following boundary value problem:
with
The exact solution of this problem is \(x^{5}-x^{4}.\) The results are shown in Table 1 and Fig. 1.

Exact and approximate solutions of Example 1

Exact and approximate solutions of Example 2
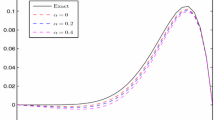
Example 4.2
Consider the boundary value problem for inhomogeneous linear fractional differential equation
with
The exact solution of this problem is \(\frac{x^{\alpha +1}}{\Gamma (\alpha +2)}.\) The results are shown in Table 2 and Fig. 2. Also, the results of same problem are compared with the numerical scheme in [20], and found that results of suggested method are more accurate than [20].
Conclusion
Collocation method is established for the approximate solution of fractional differential equation along with boundary conditions, using cubic spline. The suggested method also utilize the properties of fractional derivatives in order to solve this problem. This numerical scheme is computationally captivate. Descriptive examples show applications of this problem. It is proved that the method is of \(O(l^{2})\).
References
Diethelm, K., Scalas, E., Trujillo, J.J.: Fractional Calculus Models and Numerical Methods. World Scientific Publishing, New York (2012)
Diethelm, K., Ford, N.J., Freed, A.D.: Detailed error analysis for a fractional adams method. Numerical Algorithms 36, 31–52 (2004)
Diethelm, K.: The Analysis of Fractional Differential Equations, Lecture Notes in Mathematics (2010)
Tarasov, V.E.: Fractional Dynamics: Application of Fractional Calculus to Dynamics of particles, Fields and Media, Springer. Heidelberg; Higher Education Press, Beijing (2010)
Su, X.: Solutions to boundary value problem of fractional order on unbounded domains in a Banach space. Nonlinear Anal. 74, 2844–2852 (2011)
Torvik, P.J., Bagley, R.L.: On the appearance of the fractional derivative in the behavior of real materials. J. Appl. Mech. 51, 294–298 (1984)
Marks II, R.J., Hall, M.W.: Differintegral interpolation from a bandlimited signals samples. IEEE Trans. Acoust. Speech Signal Process. 29, 872–877 (1981)
Olmstead, W.E., Handelsman, R.A.: Diffusion in a semi-infinite region with nonlinear surface dissipation. SIAM Rev. 18, 275–291 (1976)
Scalas, E., Gorenflo, R., Mainardi, F.: Fractional calculus and continuous-time finance. Phys. A 284, 376–384 (2000)
Ahmad, B., Nieto, J.J.: Existence of solutions for nonlocal boundary value problems of higher-order nonlinear fractional differential equations. Abstr. Appl. Anal. 2009, Article ID 494720, p. 9. doi:10.1155/2009/494720
Liang, S., Zhang, J.: Existence of multiple positive solutions form-point fractional boundary value problems on an infinite interval. Math. Comput. Model. 54, 1334–1346 (2011)
Bai, Z.B., Sun, W.: Existence and multiplicity of positive solutions for singular fractional boundary value problems Comput. Math. Appl. 63, 1369–1381 (2012)
Shuqin, Z.: Existence of solution for boundary value problem of fractional order. Acta Math. Sci. 26, 220–228 (2006)
Akram, G., Tariq, H.: An Exponential Spline Technique for Solving Fractional Boundary Value Problem, Calcolo. doi:10.1007/s10092-015-0161-0
Siddiqi, S.S., Akram, G.: Solution of eighth-order boundary value problems using the non-polynomial spline technique. Int. J. Comput. Math. 84(3), 347–368 (2007)
Siddiqi, S.S., Akram, G.: Solution of tenth-order boundary value problems using eleventh degree spline. Appl. Math. Comput. 185, 115–127 (2007)
Kilbas, A.A., Srivastava, H.M., Trujillo, J.J.: Theory of Application of Fractional Differential Equations, 1st edn. Belarus (2006)
Podlubny, I.: Fractional Differential Equation. Academic, San Diego (1999)
Lakshmikantham, V., Vatsala, A.S.: Basic theory of fractional differential equations. Nonlinear Anal. 69, 2677–2682 (2008)
Rehman, M.U., Khan, R.A.: A numerical method for solving boundary value problems for fractional differential equations. Appl. Math. Model. 36, 894–907 (2012)
Usmani, R.A.: Discrete variable methods for a boundary value problem with engineering applications. Math. Comput. 32, 1087–1096 (1978)
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Akram, G., Tariq, H. Cubic Polynomial Spline Scheme for Fractional Boundary Value Problems with Left and Right Fractional Operators. Int. J. Appl. Comput. Math 3, 937–946 (2017). https://doi.org/10.1007/s40819-016-0145-z
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40819-016-0145-z