
Abstract
This paper investigates the design problem of the proportional-plus-derivative state feedback fuzzy controller for the Takagi–Sugeno fuzzy singular systems, which considering the influence of internal perturbations and external noises. To solve the perturbation problem in the control system simply and concisely, the benefit of employing a robust control approach is proposed. Considering the perturbed Takagi–Sugeno fuzzy singular systems with external noises, the Lyapunov stability theory is chosen to derive the stability conditions with passivity constraints. To bring better transient performance for the controlled systems, the decay rate constraint is also adopted. These sufficient stability conditions can be effectively transferred into the linear matrix inequality problem. Finally, an example is used to verify the proposed robust fuzzy controller design method’s applicability and effectivity.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
The Takagi–Sugeno (T–S) fuzzy model [1] is advantageous in representing nonlinear systems. There have been many successful applications in industrial fields in the past few years [2,3,4,5,6,7]. To analyze and design the control systems, it is necessary to produce the mathematical model for the systems first. By applying the T–S fuzzy modeling method, the nonlinear systems with smooth nonlinearities can be represented in a state-space set by a set of linear subsystems. The set of linear subsystems is connected by the blending of these linear models through membership functions. After T–S fuzzy modeling, the controller can be designed by taking full advantage of linear control theories. In [8, 9], the T–S fuzzy system’s significant advantage is shown that it can extend many well-established control theories to analyze and synthesize complex nonlinear models. In this paper, the Lyapunov stability theory was chosen to analyze and derive the stability conditions for the nonlinear perturbed systems with external noises. By the way, the T–S fuzzy controller can be designed by using the parallel distributed compensation (PDC) method [10]. The linear controllers for each fuzzy rule of the constructed T–S fuzzy model were designed via the PDC method. Till now, massive efforts have been devoted to study the analysis and synthesis problems for the T–S fuzzy control systems [11].
Singular systems have attracted the attention of many researchers [12, 13]. The singular systems can model a lot of special case forms in the state space, and their physical significations are more complete than the nonsingular systems. Therefore, singular systems often occur in many areas, such as electrical circuit systems, robot systems, and economic systems. Many efforts have been devoted to singular systems because the singular system is hard to be stable. Only when the system is regular and impulse-free [14], can the singular system be stabilized. The singular systems have been extensively studied for continuous-time and discrete-time systems [14, 15].
Recently, there are so many papers discussing perturbed T–S fuzzy singular systems. However, most papers still used output feedback or state feedback control for perturbed T–S fuzzy singular systems [16, 17]. Suppose one used the state feedback to design the fuzzy controller. In that case, it is necessary to ensure that the system is regular and impulse-free first and then analyze the stability of the system. In order to overcome the above problem, a proportional-plus-derivative state feedback (PDSF) method has been applied in [18,19,20,21].
It is well known that if state derivatives are available for the controller design, the PDSF method is even more important for the T–S fuzzy singular systems. Referring to [19], the state derivative information can be utilized to eliminate the impulse behavior of singular systems. From [20], one can know that PDSF method can avoid the assumptions about singularities and possible rank changes of the derivative matrix. However, the research on PDSF control of T–S fuzzy singular systems has not been thoroughly studied as far as we know. Only several studies have been carried out on PDSF control for the singular systems. For example, the robust decentralized stabilization of large-scale singular systems via the PDSF method has been studied [20]. Decentralized guaranteed cost control for uncertain large-scale singular systems via PDSF method was studied in [21].
In the past decade, external noise has also attracted significant attention for the researcher. In many practical systems, perturbations and external noise usually exist and need to be considered because they may affect the system’s stability and performance. Usually, the external noise of the system is inevitable, and the design of the controller needs to consider these noises. It is well known that the passivity constraint [22,23,24,25] can be used to inhibit external noise problems. Therefore, passive constraints are also discussed in the proposed fuzzy controller design problem.
In [26], the robust passive control for uncertain time-delay singular systems has been studied. However, the controllers designed in [26] were developed based on the traditional state feedback approach. Hence, this paper will investigate the robust fuzzy controller design problem subject to passivity constraint using the PDSF method. That is, not only the robust control theory [27, 28] was applied to inhibit the perturbations of the systems, but also the passivity constraint was also chosen to inhibit external noise in this paper. Using the Lyapunov stability theory [29], the stability conditions with a decay rate constraint were derived with achieving passivity constraints for the perturbed T–S fuzzy singular systems.
In this paper, the nonlinear singular systems are expressed by the T–S fuzzy model considering the internal perturbations and external noises. The PDSF fuzzy control approach investigated in this paper was developed based on the PDC method. Following the Lyapunov stability theory, sufficient conditions can be obtained to design the robust fuzzy controller. These sufficient stability conditions can be transferred into the linear matrix inequality (LMI) problem that can be solved by the convex optimal programming algorithm [10]. Finally, a numerical example was provided to show the applicability and effectivity of the proposed robust fuzzy control method.
2 System Statements and Problem Descriptions
In this paper, a PDSF fuzzy controller based on the robust control theory for the T–S singular systems is proposed. Considering the systems with the perturbations and external noises, the complex nonlinear perturbed singular systems can be expressed by the following perturbed T–S fuzzy singular systems.
Plant Rule i:
IF \(\mu_{1} \left( t \right)\) is \({\text{M}}_{i1}\) and … and \(\mu_{ik} \left( t \right)\) is \({\text{M}}_{ik}\) THEN
where \(i = 1,2, \cdots ,n\) and \(n\) is the rule number, \(M_{ik}\) are fuzzy sets, \(k\) is the number of premise variables, \(x\left( t \right) \in \Re^{n}\) is the state vector, \(u\left( t \right) \in \Re^{m}\) is the control input vector, \(y\left( t \right) \in \Re^{q}\) is the output vector, and \(v\left( t \right) \in \Re^{z}\) denotes the disturbance input which belongs to \(L_{2} \left[ {0,\infty } \right)\).
Besides, \({\mathbf{A}}_{i} \in \Re^{n \times n}\), \({\mathbf{B}}_{i} \in \Re^{n \times m}\), \({\mathbf{G}}_{i} \in \Re^{q \times z}\), \({\mathbf{C}}_{i} \in \Re^{q \times n}\), and \({\mathbf{D}}_{i} \in \Re^{q \times z}\) are constant matrices and \({\varvec{\Xi}}_{i} \in \Re^{n \times n}\) is a constant matrix with \(rank\left( {{\varvec{\Xi}}_{i} } \right) = r < n\).
The perturbations in the T–S fuzzy model (1a) are considered as \({\mathbf{\Delta A}}_{i} { = }{\mathbf{H}}_{i} {\varvec{\Delta}}_{i} {\mathbf{R}}_{ai}\). \({\mathbf{H}}_{i}\) , and \({\mathbf{R}}_{ai}\) denote the known matrices, which are the composition of the perturbations and \({\varvec{\Delta}}_{i}\) denote the time-varying uncertain matrices. Considering the state vector \(x\left( t \right)\) and the input vector \(u\left( t \right)\) of the T–S fuzzy model (1), the overall perturbed T–S fuzzy singular model can be “blending” as follows:
where \(\omega \left( t \right) = \prod\nolimits_{j = 1}^{k} {M_{ij} \left( {\mu_{j} \left( t \right)} \right)}\), \({{\xi_{i} \left( {\mu \left( t \right)} \right) = \omega \left( t \right)} \mathord{\left/ {\vphantom {{\xi_{i} \left( {\mu \left( t \right)} \right) = \omega \left( t \right)} {\sum\nolimits_{i = 1}^{n} {\omega \left( t \right)} }}} \right. \kern-0pt} {\sum\nolimits_{i = 1}^{n} {\omega \left( t \right)} }}\), \(\xi_{i} \left( {\mu \left( t \right)} \right) \ge 0\), \(\sum\nolimits_{i = 1}^{n} {\xi_{i} \left( {\mu \left( t \right)} \right) = 1}\) , and \(M_{ij} \left( {\mu_{j} \left( t \right)} \right)\) is the grade of the membership of \(\mu_{j} \left( t \right)\).
To address the design scheme of the PDSF controller, some definitions are recalled. Consider the linear singular system represented by
Definition 1
-
(1)
The unforced singular system (3) is said to be regular if \(\det \left( {s{\varvec{\Xi}} - {\mathbf{A}}} \right) \ne 0\).
-
(2)
The unforced singular system (3) is said to be impulse-free if it is regular, and \(\text{deg}\left[ {\det \left( {s{\varvec{\Xi}} - {\mathbf{A}}} \right)} \right] = rank\left( {\varvec{\Xi}} \right)\).
-
(3)
The unforced singular system (3) is said to be stable if it is regular, impulse-free, and \(\sigma \left( {{\varvec{\Xi}},{\mathbf{A}}} \right)\) lies in the open left half-plane, where \(\sigma \left( {{\varvec{\Xi}},{\mathbf{A}}} \right)\) denotes all the roots of \(\det \left( {s{\varvec{\Xi}} - {\mathbf{A}}} \right) = 0\).
-
(4)
The unforced singular system (3) is said to be admissible if it is regular, impulse-free, and stable.
Definition 2
[30,31,32] The singular system (3) is said to be normal and stable (NS), if there exists a PDSF controller \(u\left( t \right) = {\mathbf{F}}x\left( t \right) - {\mathbf{F}}\dot{x}\left( t \right)\) such that its closed-loop system
satisfies the following requirements:
- (R1):
-
The derivative matrix \(\left( {{\varvec{\Xi}} + {\mathbf{B}}{\mathbf{F}}} \right)\) is nonsingular
- (R2):
-
The resultant closed-loop system (4) is stable
Remark 1
[30] Clearly, if the normal condition \(\det \left( {s{\varvec{\Xi}} - {\mathbf{A}}} \right) \ne 0\), holds, then the system (4) can be rewritten as
Obviously, the solution of the system (5) exists and is unique. Meanwhile, the system (5) is impulse-free since it has no infinite poles. As a result, if the system (3) could be NS via a PDSF control law, by virtue of the above-mentioned definitions, one can conclude that system (3) is admissible.
Definition 3
[22] Suppose there exist the performance matrices \({\mathbf{Q}}_{ 1}\), \({\mathbf{Q}}_{2}\), \({\mathbf{Q}}_{3}\) for satisfying the following inequality. In that case, the perturbed T–S fuzzy singular system is called passive with external noise input \(v\left( t \right)\) and output \(y\left( t \right)\) for all terminal time \(t_{p} > 0\).
By setting different matrices \({\mathbf{Q}}_{ 1}\), \({\mathbf{Q}}_{2} \ge 0\), \({\mathbf{Q}}_{3}\), one can define several performance constraints from the inequality (6). In this paper, the strictly input passive performance constraint (SIPPC) is considered as follows:
Let \({\mathbf{Q}}_{1} { = }{\mathbf{I}}\), \({\mathbf{Q}}_{2} = 0\), \({\mathbf{Q}}_{3} = \theta {\mathbf{I}}\) , and \(\theta\) is a positive scalar, then the passivity constraint (6) becomes:
Remark 2
Recalling for any nonsymmetric matrix \({\mathbf{Q}}\left( {{\mathbf{Q}} \ne {\mathbf{Q}}^{\text{T}} } \right)\), \({\mathbf{Q}} \in \Re^{n \times n}\), if \({\mathbf{Q}} + {\mathbf{Q}}^{\text{T}} < 0\) then \({\mathbf{Q}}\) has full rank.
In this paper, the critical aim of this paper is to design the following PDC fuzzy controller to ensure the passive stability of the closed-loop system (2). The designed fuzzy PDSF controller shares the same fuzzy rules as the system (2). The overall fuzzy PDSF controller can be formulated as follows:
IF \(\mu_{1} \left( t \right)\) is \({\text{M}}_{i1}\) and … and \(\mu_{ik} \left( t \right)\) is \({\text{M}}_{ik}\) THEN
Then, the overall fuzzy controller can be represented by
Substituting the control input (9) into the perturbed T–S fuzzy singular model (2a), the closed-loop state equation can be obtained as follows:
where \({\tilde{\mathbf{A}}} = \left( {{\mathbf{A}}_{i} + \Delta {\mathbf{A}}_{i} } \right)\).
Assumption 1
Considering the closed-loop fuzzy system (10), it is assumed that the linear subsystems of (10) are regular and NS. From Definition 1, the normal condition \(\det \left( {s{\varvec{\Xi}}_{i} - {\mathbf{A}}_{i} } \right) \ne 0\) is assumed to be held for each linear subsystem of (10). According to Definition 2, the derivative matrices \(\left( {{\varvec{\Xi}}_{k} + {\mathbf{B}}_{i} {\mathbf{F}}_{j} } \right)\) are assumed to be nonsingular when the subsystem of system (10) is admissible.
Considering the perturbations of the T–S fuzzy model (10), they are constructed as \({\mathbf{\Delta A}}_{i} { = }{\mathbf{H}}_{i} {\varvec{\Delta}}_{i} {\mathbf{R}}_{ai}\). For these perturbations, the following lemma is useful for the design of the proposed robust fuzzy control approach.
Lemma [3]
Given real compatible dimension matrices \({\mathbf{A}}\), \({\mathbf{H}}\) , and \({\mathbf{R}}\) for any matrix \({\mathbf{X}}{ > 0}\), \(\varsigma { > 0}\) with the conditions \({\varvec{\Delta}}^{\text{T}} (t ){\varvec{\Delta}} (t )\le {\mathbf{I}}\) and \({\mathbf{X}}{ - }\xi {\varvec{\Delta}} (t ){\varvec{\Delta}}^{\text{T}} (t )\ge 0\), one can find two results as follows:
and
Lemma 1 provides a method to convert the uncertain item \({\varvec{\Delta}}\) in the model perturbations. The purpose of this paper is to design the PDSF fuzzy controller, which combined the robust control theory, decay rate constraint, and passivity constraint to derive Lyapunov stability conditions. For readability, the \(He\left\{ {\varvec{\upeta}} \right\}\) denotes shorthand notation for \({\varvec{\upeta}} + {\varvec{\upeta}}^{\text{T}}\).
In order to introduce the stability conditions for the singular systems more thoroughly, we first studied the stability for the closed-loop singular system without external noises in Theorem 1. From the closed-loop system (10), one can obtain the closed-loop system without external noise as follows:
Definition 4
[7] Consider a candidate of Lyapunov function \(V\left( {x\left( t \right)} \right) = x^{\text{T}} \left( t \right){\mathbf{P}}x\left( t \right)\), where \({\mathbf{P}} > 0\). The fuzzy system (13) is said to be quadratically stable with decay rate \(\gamma\) if there exists \(\gamma > 0\) such that the Lyapunov derivative is bounded as follows:
for all trajectories of the system (13).
In the next section, the PDSF fuzzy controller will be designed based on robust control theory and Lyapunov stability theory. The sufficient conditions will be derived to satisfy passivity constraint and decay rate constraint simultaneously.
3 Controller Design For Perturbed T–S Fuzzy Singular Systems via Proportional-Plus-Derivative State Feedback Method
In this section, a robust PDSF fuzzy controller for the closed-loop perturbed T–S fuzzy singular system is proposed. Defining the Lyapunov function, one can obtain the stability conditions by the following theorem.
Theorem 1
If there exist a positive definite matrix \({\mathbf{S}}\) and feedback gains \({\mathbf{K}}_{i}\) and \({\mathbf{K}}_{ij}\) to satisfy the following stability conditions, then the perturbed T–S fuzzy singular system (13) is asymptotically stable.
where * is an ellipsis for the terms that are introduced by symmetry for symmetric block matrices and
\({\mathbf{B}}_{ij} = \left( {{\mathbf{B}}_{i} + {\mathbf{B}}_{j} } \right),\;{\mathbf{F}}_{ij} = \left( {{\mathbf{F}}_{i} + {\mathbf{F}}_{j} } \right),\;{\mathbf{R}}_{1} = {\mathbf{R}}_{ai} {\mathbf{S\varXi }}_{k}^{\text{T}}\),
\({\mathbf{R}}_{2} { = }{\mathbf{R}}_{ai} {\mathbf{K}}_{i}^{\text{T}} {\mathbf{B}}_{i}^{\text{T}} ,\;{\mathbf{R}}_{ 3} = \left( {{\mathbf{R}}_{ai} + {\mathbf{R}}_{aj} } \right){\mathbf{S\varXi }}_{k}^{\text{T}}\),
\({\mathbf{R}}_{ 4} { = }\left( {{\mathbf{R}}_{ai} + {\mathbf{R}}_{aj} } \right){\mathbf{K}}_{ij}^{\text{T}} {\mathbf{B}}_{ij}^{\text{T}} ,{\mathbf{K}}_{ij} = \left( {{\mathbf{F}}_{i} + {\mathbf{F}}_{j} } \right){\mathbf{S}}\),
\(\varPhi_{ii} = He\left\{ {{\varvec{\Xi}}_{k} {\mathbf{SA}}_{i}^{\text{T}} { + }{\mathbf{B}}_{i} {\mathbf{K}}_{i} {\mathbf{A}}_{i}^{\text{T}} { + }{\mathbf{B}}_{i} {\mathbf{K}}_{i} {\varvec{\Xi}}_{k}^{\text{T}} } \right\} + 2\varsigma {\mathbf{H}}_{i} {\mathbf{H}}_{i}^{\text{T}}\), and
Proof
To analyze the stability of the closed-loop system, the following Lyapunov function was chosen:
where \({\mathbf{P}} > 0\).
Taking differential of the Lyapunov function \(V\left( {x\left( t \right)} \right)\), then one can get
From (13), the Eq. (18) can be rewritten as follows:
where
If \({\varvec{\Lambda}}_{ii} < 0\) and \({\varvec{\Lambda}}_{ij} < 0\) are satisfied, \(\dot{V}\left( {x\left( t \right)} \right) < 0\) is also satisfied. Then the perturbed T–S fuzzy singular system (13) is asymptotically stable. However, \({\varvec{\Lambda}}_{ii} < 0\) and \({\varvec{\Lambda}}_{ij} < 0\) are not the LMI conditions, one cannot solve them by LMI technology.
Now, pre-multiplying \(\varTheta_{ii} = \left( {{\varvec{\Xi}}_{k} + {\mathbf{B}}_{i} {\mathbf{F}}_{i} } \right){\mathbf{P}}^{ - 1}\) and post-multiplying \(\varTheta_{ii}^{\text{T}}\) on both sides of (20), one can obtain
Defining a new variable \({\mathbf{S}} = {\mathbf{P}}^{ - 1}\), \({\mathbf{S}} > 0\), \({\mathbf{K}}_{i} { = }{\mathbf{F}}_{i} {\mathbf{S}}\) , and \({\mathbf{\Delta A}}_{i} { = }{\mathbf{H}}_{i} {\varvec{\Delta}}_{i} {\mathbf{R}}_{ai}\), one can rewrite (22) as
Based on Lemma 1, by replacing the matrices \({\mathbf{R}}_{1} = {\mathbf{R}}_{ai} {\mathbf{S\varXi }}_{k}^{\text{T}}\) and \({\mathbf{R}}_{2} { = }{\mathbf{R}}_{ai} {\mathbf{K}}_{i}^{\text{T}} {\mathbf{B}}_{i}^{\text{T}}\), the following inequality can be obtained from (23).
where \(\varPhi_{ii} = He\left\{ {{\varvec{\Xi}}_{k} {\mathbf{SA}}_{i}^{\text{T}} { + }{\mathbf{B}}_{i} {\mathbf{K}}_{i} {\mathbf{A}}_{i}^{\text{T}} { + }{\mathbf{B}}_{i} {\mathbf{K}}_{i} {\varvec{\Xi}}_{k}^{\text{T}} } \right\} + 2\varsigma {\mathbf{H}}_{i} {\mathbf{H}}_{i}^{\text{T}}\).
By using Schur complements [10], the nonlinear inequality can be converted into the following LMI form:
According to the procedure from (22) to (25), pre-multiplying \(\varTheta_{ij} = \left( {{\varvec{\Xi}}_{k} + {\mathbf{B}}_{ij} {\mathbf{F}}_{ij} } \right){\mathbf{P}}^{ - 1}\) and post-multiplying \(\varTheta_{ij}^{\text{T}}\) on both sides of (21), one can get the following equation.
where
\({\mathbf{K}}_{ij} { = }{\mathbf{F}}_{ij} {\mathbf{S}}\), \({\mathbf{R}}_{ 3} = \left( {{\mathbf{R}}_{ai} + {\mathbf{R}}_{aj} } \right){\mathbf{S\varXi }}_{k}^{\text{T}}\), \({\mathbf{R}}_{ 4} { = }\left( {{\mathbf{R}}_{ai} + {\mathbf{R}}_{aj} } \right){\mathbf{K}}_{ij}^{\text{T}} {\mathbf{B}}_{ij}^{\text{T}}\) , and
Obviously, if the conditions (15) and (16) in Theorem 1 are satisfied, then the Eqs. (25) and (26) meet \(\varTheta_{ii} {\varvec{\Lambda}}_{ii} \varTheta_{ii}^{\text{T}} < 0\) and \(\varTheta_{ij} {\varvec{\Lambda}}_{ij} \varTheta_{ij}^{\text{T}} < 0\). On the other hand, if the equations \(\varTheta_{ii} {\varvec{\Lambda}}_{ii} \varTheta_{ii}^{\text{T}} < 0\) and \(\varTheta_{ij} {\varvec{\Lambda}}_{ij} \varTheta_{ij}^{\text{T}} < 0\) are satisfied, then one can obtain \({\varvec{\Lambda}}_{ii} < 0\), \({\varvec{\Lambda}}_{ij} < 0\) , and \(\dot{V}\left( {x\left( t \right)} \right) < 0\) from (19), and the perturbed T–S fuzzy singular system (13) is stable. The proof of this theorem is completed.
The feasible solutions for conditions (15) and (16) of Theorem 1 can be solved by using the LMI technology. First, one can solve the matrices \({\mathbf{S}}\), \({\mathbf{K}}_{i}\) , and \({\mathbf{K}}_{ij}\) from (15) and (16) by using MATLAB LMI-Toolbox. Then, according to \({\mathbf{F}}_{i} = {\mathbf{K}}_{i} {\mathbf{S}}^{ - 1}\) and \({\mathbf{F}}_{ij} = {\mathbf{K}}_{ij} {\mathbf{S}}^{ - 1}\), one can obtain the feedback gains \({\mathbf{F}}_{i}\) and \({\mathbf{F}}_{ij}\).
Remark 3
Note that \({\varvec{\Lambda}}_{ii} < 0\) and \({\varvec{\Lambda}}_{ij} < 0\) imply that the derivative matrices \(\left( {{\varvec{\Xi}}_{k} + {\mathbf{B}}_{i} {\mathbf{F}}_{i} } \right)^{ - 1}\) in the system (13) are nonsingular. That is, the closed-loop system (13) is admissible. Thus, by Definition 2, one can conclude that the closed-loop system (13) is NS as long as the conditions (15) and (16) hold simultaneously.
In Theorem 1, robustness is the only performance considered in the fuzzy controller design. In the next theorem, the decay rate will be introduced for the closed-loop systems. Decay rate constraint will bring better transient performance for the systems. Hence, the robust performance is combined with the decay rate constraint in the subsequent fuzzy controller design process.
Theorem 2
If there exists a positive definite matrix \({\mathbf{S}}\), feedback gains \({\mathbf{K}}_{i}\),\({\mathbf{K}}_{ij}\) and given decay rate \(\gamma\) to satisfy the following stability conditions, then the perturbed T–S fuzzy singular system (13) is quadratically stable with a decay rate \(\gamma\).
Proof
The conditions (27) and (28) can be represented as follows by Schur complements [10].
and
where
Therefore, if the conditions (29) and (30) are satisfied, then the following inequalities are also satisfied due to inequality (24).
and
Multiplying \(x^{\text{T}} \left( t \right)\varTheta_{ii}^{ - 1}\) and \(\varTheta_{ii}^{{ - {\text{T}}}} x\left( t \right)\) on the left-hand and right-hand sides of (33), then one can get
By the same way, the following equation can be obtained from (34).
According to \(\sum\limits_{i = 1}^{n} {\xi_{i} \left( {\mu \left( t \right)} \right) = 1}\) and \(0 \le \xi_{i} \left( {\mu \left( t \right)} \right) \le 1\), one can obtain the following inequalities.
and
Adding (35) with (36), one can get
Note that if Eq. (39) is satisfied, it means that the following equation is also satisfied due to (37) and (38).
According to Eq. (19), the inequality (40) can also be expressed as \(\dot{V}\left( t \right) < - 2\gamma V\left( {x\left( t \right)} \right)\). By Definition 4, one can conclude that the T–S fuzzy singular system (13) is quadratically stable with a decay rate \(\gamma\). Therefore, the perturbed T–S fuzzy singular system (13) controlled by the proportional-plus-derivative state feedback fuzzy controller achieves decay rate constraint if conditions (27) and (28) are satisfied.
In the next theorem, let us consider the external noises for the controlled systems. The passivity constraint is chosen to deal with external noises. Besides, the decay rate is also considered in the proposed passive fuzzy controller design process. The passivity theory is employed to treat the external noises of systems. The sufficient stability conditions subject to SIPPC of (7) are developed in the following theorem.
Theorem 3
If there exists a positive definite matrix \({\mathbf{S}}\), controller feedback gains \({\mathbf{K}}_{i}\),\({\mathbf{K}}_{ij}\), decay rate \(\gamma\) and performance matrices \({\mathbf{Q}}_{ 1}\), \({\mathbf{Q}}_{2} \ge 0\) and \({\mathbf{Q}}_{3}\) to satisfy the following stability conditions, then the perturbed T–S fuzzy singular system (10) with external noise achieves the quadratic stability, decay rate constraint, and passivity constraint.
where
and
Proof
Let us define the same Lyapunov function of (17). According to [4,5,6,7], one can take differential of the Lyapunov function \(V\left( {x\left( t \right)} \right)\), then one has
The Eq. (46) can be rewritten as follows from (10).
where
and
By multiplying \(\tilde{\varTheta }_{ii} = diag\left[ {\begin{array}{*{20}c} {\varTheta_{ii} } & {\mathbf{I}} \\ \end{array} } \right]\) and its transport on both sides of (48), one can obtain
In the same way, multiplying \(\tilde{\varTheta }_{ij} = diag\left[ {\begin{array}{*{20}c} {\varTheta_{ij} } & {\mathbf{I}} \\ \end{array} } \right]\) and its transport on (49), then one has
Using (50) and (51), one can define the following Lyapunov function.
To inhibit the external noise, the passivity constraint was considered, and the following cost function was defined with zero initial condition.
where
Substituting (2b) into (54), one has
Rewriting the above Eq. (55), one can get
where
Substituting (52) into (56), one can obtain the Eq. (57).
where
and \({\tilde{\mathbf{Q}}}_{i}\), \({\tilde{\mathbf{Q}}}_{ij}\) and \({\tilde{\mathbf{Q}}}\) has been defined in (43)–(45).Following the same derivation form (23) to (25), the Eqs. (58) and (59) can be rewritten as follows by the Schur complement [10].
and
Applying the Schur complements [10] for conditions (41) and (42), one can obtain the following equations.
and
Thus, if the conditions (41) and (42) are satisfied, then \({\varvec{\upomega}} < 0\) and \({\tilde{\mathbf{\omega }}} < 0\) that implies \(\varPsi \left( {x,v,t} \right) < 0\) via (57). Notice that \(\varPsi \left( {x,v,t} \right) < 0\) implies
and
That is, if the conditions (41) and (42) are satisfied, then the passivity constraint (6) is achieved. In order to discuss the stability of the closed-loop system, let us assume that \(v\left( t \right) = 0\). Then, one can obtain the following inequality from (54) due to \(\varPsi \left( {x,v,t} \right) < 0\) and \(v\left( t \right) = 0\).
Because \({\mathbf{Q}}_{2} \ge 0\), one has \(\dot{\tilde{V}}_{1} \left( {x\left( t \right)} \right) < 0\) from (64).
Besides, the conditions (41) and (42) can be represented by the following inequalities by the Schur complement [10].
and
where \({\tilde{\mathbf{\varLambda }}}_{ii}\) and \({\tilde{\mathbf{\varLambda }}}_{ij}\) have been defined in (31) and (32). From (24), (67), and (68), the following inequalities can be obtained because \({\mathbf{Q}}_{2} \ge 0\).
and
Therefore, if the conditions (67) and (68) are satisfied, the following inequalities are also satisfied due to (69) and (70).
and
Now, multiplying \(\left[ {\begin{array}{*{20}c} {x\left( t \right)} \\ {v\left( t \right)} \\ \end{array} } \right]^{\text{T}} \tilde{\varTheta }_{ii}^{ - 1}\) and \(\tilde{\varTheta }_{ii}^{{ - {\text{T}}}} \left[ {\begin{array}{*{20}c} {x\left( t \right)} \\ {v\left( t \right)} \\ \end{array} } \right]\) on the left-hand and right-hand sides of (71), where \(\tilde{\varTheta }_{ii}^{ - 1} = diag\left[ {\begin{array}{*{20}c} {\varTheta_{ii}^{ - 1} } & {\mathbf{I}} \\ \end{array} } \right]\), then one can get
By the same way, multiplying \(\left[ {\begin{array}{*{20}c} {x\left( t \right)} \\ {v\left( t \right)} \\ \end{array} } \right]^{\text{T}} \tilde{\varTheta }_{ij}^{ - 1}\) and \(\tilde{\varTheta }_{ij}^{{ - {\text{T}}}} \left[ {\begin{array}{*{20}c} {x\left( t \right)} \\ {v\left( t \right)} \\ \end{array} } \right]\) on the left-hand and right-hand sides of (72), then one has
Due to \(v\left( t \right) = 0\), the Eqs. (73) and (74) can be rewritten as follows:
and
According to \(\sum\limits_{i = 1}^{n} {\xi_{i} \left( {\mu \left( t \right)} \right) = 1}\) and \(0 \le \xi_{i} \left( {\mu \left( t \right)} \right) \le 1\), one can obtain the following inequalities.
and
Adding (75) with (76), one can get
According to (77) and (78), if Eq. (79) is satisfied, it means the following equation is also satisfied.
According to Eq. (19), the inequality (80) can also be rewritten as follows:
From (81), one can conclude that the closed-loop system is quadratically stable by Definition 4. Thus, if the conditions (41) and (42) of Theorem 3 are satisfied, the singular system (10) is quadratically stable and satisfies the decay rate constraint and passivity constraint simultaneously.
By solving the stability conditions provided in Theorem 3, the PDSF fuzzy controller (9) can be designed for the perturbed T–S fuzzy singular system with external noises (10). In this section, we considered the passivity constraints to inhibit the external noises. Therefore, the nonlinear singular systems can obtain better performance under external noises.
It is evident that the conditions of Theorem 3 belong to the LMI problem that MATLAB LMI-Toolbox can directly solve for seeking feasible solutions. To solve the feasible solutions of the above problem, the following design procedure is proposed for Theorem 3.
Design Procedure
-
Step 1:
Set up the scalar \(\gamma > 0\) and performance matrices \({\mathbf{Q}}_{1}\), \({\mathbf{Q}}_{2} \ge 0\), \({\mathbf{Q}}_{3}\).
-
Step 2:
Solve the conditions of Theorem 3 to obtain the variables \({\mathbf{S}} > 0\), \({\mathbf{K}}_{i}\) and \({\mathbf{K}}_{ij}\) by using MATLAB LMI-Toolbox.
-
Step 3:
According to \({\mathbf{F}}_{i} = {\mathbf{K}}_{i} {\mathbf{S}}^{ - 1}\) and \({\mathbf{F}}_{ij} = {\mathbf{K}}_{ij} {\mathbf{S}}^{ - 1}\), one can find the feedback gains \({\mathbf{F}}_{i}\) and \({\mathbf{F}}_{ij}\).
-
Step 4:
Ensure the satisfaction of Assumption 1 for the closed-loop fuzzy system (10).
-
Step 5:
Based on the gains obtained by Step 3, the corresponding controller (9) can be constructed to establish the PDSF fuzzy controller.
Based on the above design procedure, the PDSF fuzzy controller (9) can be designed to guarantee the stability of the perturbed T–S fuzzy singular system (10) with external noises subject to decay rate and passivity constraint. In the next section, a numerical example was applied to verify the proposed fuzzy controller design method’s availability and effectiveness.
4 A Numerical Example and Simulations
In this section, Theorem3 is used to verify the applicability for the proposed robust fuzzy control method, and some comparisons will be given. Let us consider a nonlinear perturbed singular system with external noises, which is represented by the perturbed T–S fuzzy singular model with external noises as follows:
where
The perturbations of T–S fuzzy singular system (10) are described by \({\mathbf{\Delta A}}_{i} = {\mathbf{H}}_{i} {\varvec{\Delta}}\left( t \right){\mathbf{R}}_{ai}\), where
and\({\mathbf{\Delta A}}_{2} \left( t \right) = \left[ {\begin{array}{*{20}c} {0.01{ \sin }\left( t \right)} & 0 & 0 \\ 0 & {0.1{ \sin }\left( t \right)} & 0 \\ {0.01{ \sin }\left( t \right)} & 0 & {0.02{ \sin }\left( t \right)} \\ \end{array} } \right]\).It is assumed that the disturbance \(v\left( t \right)\) has the following form:
In this example, we also consider the output tracking problem. The output signals \(\tilde{y}\left( t \right)\) and \(y_{ref} \left( t \right)\) described in (82b) are the real output and reference output, respectively. In order to discuss the passivity constraint and decay rate constraint, this example will first study the regulation design that considered the output \(y\left( t \right)\) given in (82c). Then, the reference output is assigned as \(y_{ref} \left( t \right) = 3\sin \left( t \right)\) for the subsequent tracking case.
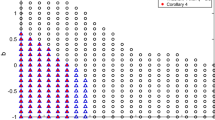
Considering the membership functions of \(x_{1} \left( t \right)\) stated in Fig. 1, then the perturbed T–S fuzzy singular model with external noises can be constructed as follows:
Rule 1:IF \(x_{1} \left( t \right)\) is about 0 THEN
Rule 2:IF \(x_{1} \left( t \right)\) is about \(\pm 3\) THEN
Choose the decay rate as \(\gamma = 5\). The proposed PDSF fuzzy controller can be designed by following the design procedure provided in Section III. By using MATLAB LMI-Toolbox to solve the conditions (41) and (42) of Theorem 3, the common positive definite matrix \({\mathbf{P}}\) can be obtained as follows.

The membership functions of state \(x_{1} \left( t \right)\)
According to the above feedback gains, the proportional-plus-derivative state feedback fuzzy controller can be constructed by using the PDC method as follows:
Rule 1:IF \(x_{1} \left( t \right)\) is about \(0\) THEN
Rule 2:IF \(x_{1} \left( t \right)\) is about \(\pm 3\) THEN
In order to show the advantage and effectiveness of the proposed fuzzy controller design approach, it was compared with the previous fuzzy control method developed in [18]. Considering the LMI conditions investigated in [18], one can define the following controller.
Rule 1:IF \(x_{1} \left( t \right)\) is about 0 THEN
Rule 2:IF \(x_{1} \left( t \right)\) is about \(\pm 3\) THEN
The feedback gain solutions can be obtained by solving the conditions of Theorem3 in [18] as follows:
For the simulations, let us choose the initial condition as \(x\left( 0 \right) = \left[ {\begin{array}{*{20}c} 1& 0 & { - 2} \\ \end{array} } \right]^{\text{T}}\). The state responses for the fuzzy controllers (86) and (87) are shown in Figs. 2, 3, 4. Referring to Figs. 2, 3, 4, it can be found the proposed fuzzy controller (86) has a smaller setting time than the fuzzy controller (87) developed in [18] because decay rate constraint was considered in the proposed design approach. Besides, the following specific values can be calculated to verify the SIPPC of (7).
It can be found that the value of (89a) is bigger than 1 and (89b) is not bigger than 1. It implies that the closed-loop system achieving the SIPPC via the proposed fuzzy controller (86), but the fuzzy controller (87) developed in [18] does not achieve the SIPPC constraint. In conclusion, the proposed fuzzy control method provides better state responses than the fuzzy control approach investigated in [18], and fuzzy controller (87) developed in [18] does not achieve the SIPPC constraint. Next, let us compare the output tracking responses for the proposed fuzzy control method and the fuzzy control approach of [18]. In order to make a clear comparison, it is assumed \(v\left( t \right) = 0\), and the reference output is defined as \(y_{ref} \left( t \right) = 3\sin \left( t \right)\). That is, the real output tracks the sinusoidal function \(\tilde{y}\left( t \right)\) without considering external noises. Figure 5 presents the simulation results for the output responses driven by fuzzy controllers (86) and (87), respectively. The results show that the proposed fuzzy control approach achieves better tracking performance than the design method developed in [18]. From the comparisons of this example, one can find that the proposed fuzzy controller designed by PDSF has a shorter settling time than the fuzzy control method of [18]. And the passivity constraint can be used to successfully inhibit the external noise by using the proposed fuzzy controller. Via the proposed PDSF fuzzy controller design method, the perturbed T–S fuzzy singular systems can be controlled to simultaneously satisfy stability, robustness, passivity, and decay rate constraint.

The responses of state \(x_{1} \left( t \right)\)

The responses of state \(x_{2} \left( t \right)\)

The responses of state \(x_{3} \left( t \right)\)

The responses of output tracking
5 Conclusions
In this paper, a PDSF fuzzy controller with multiple constraints has been designed for the perturbed T–S fuzzy singular systems with external noises. The performance requirements described in this approach included the system stability, robust constraint, decay rate constraint, and passivity constraint. This paper’s advantage is that the stability conditions developed by the proposed fuzzy control method are more straightforward than those derived by using the state feedback control method. The simulated comparison results show that the proposed PDSF fuzzy control approach provided better state responses and output tracking performance. The problem of extending the proposed PDSF fuzzy controller design approach to discrete-time cases can be studied and discussed in the future.
References
Takagi, T., Takayuki, L., Wang, H.O.: Fuzzy regulators and fuzzy observers: relaxed stability conditions and LMI-based designs. IEEE Trans. Fuzzy Syst. 6(2), 250–265 (1998)
Yeh, J., Su, S.F.: Efficient approach for RLS type learning in TSK neural fuzzy systems. IEEE Trans. Cybern. 47(9), 2343–2352 (2017)
Chang, W.J., Ku, C.C.: Robust fuzzy control for uncertain stochastic time-delay Takagi-Sugeno fuzzy models for achieving passivity. Fuzzy Sets Syst. 161(15), 2012–2032 (2010)
Uang, H.J.: On the dissipativity of nonlinear systems: fuzzy control approach. Fuzzy Sets Syst. 156(2), 185–207 (2005)
Liu, X., Zhang, Q.: Approaches to quadratic stability conditions and H∞ control designs for TS fuzzy systems. IEEE Trans. Fuzzy Syst. 11(6), 830–839 (2003)
Chiang, W.L., Chen, T.W., Liu, M.Y., Hsu, C.J.: Application and robust H∞ control of PDC fuzzy controller for nonlinear systems with external disturbance. J. Mar. Sci. Technol. 9(2), 84–90 (2001)
K. R. Lee, T. J. Eun, and B. P. Hong, “Robust fuzzy H∞ control for uncertain nonlinear systems via state feedback: an LMI approach,” Fuzzy sets and systems, Vol. 120, Vo. 1, pp. 123-134, 2001
Chang, X.H., Liu, Y.: Robust H∞ filtering for vehicle sideslip angle with quantization and data dropouts. IEEE Trans. Veh. Technol. 69(10), 10435–10445 (2020)
Chang, X.H., Yang, G.: Nonfragile H∞ filter design for T-S fuzzy systems in standard form. IEEE Trans. Industr. Electron. 61(7), 3448–3458 (2014)
Tanaka, K., Wang, H.O.: Fuzzy Control Systems Design and Analysis: A Linear Matrix Inequality Approach. Wiley, New York (2001)
Chang, W.J., Hsu, F.L.: Sliding mode fuzzy control for Takagi-Sugeno fuzzy systems with bilinear consequent part subject to multiple constraints. Inf. Sci. 327, 258–271 (2016)
Rongchang, L., Yang, Y.: Fault detection for TS fuzzy singular systems via integral sliding modes. J. Franklin Inst. 357(17), 13125–13143 (2020)
Zhenghong, J., Zhang, Q., Ren, J.: The approximation of the T-S fuzzy model for a class of nonlinear singular systems with impulses. Neural Comput. Appl. 32(14), 10387–10401 (2020)
Lu, G., Ho, D.W.C.: Generalized quadratic stability for continuous-time singular systems with nonlinear perturbation. IEEE Trans. Autom. Control 51(5), 818–823 (2006)
Huang, C.P.: Stability analysis of discrete singular fuzzy systems. Fuzzy Sets Syst. 151(1), 155–165 (2005)
Xu, S., Song, B., Lu, J., Lam, J.: Robust stability of uncertain discrete-time singular fuzzy systems. Fuzzy Sets Syst. 158(20), 2306–2316 (2007)
Liu, P., Yang, W.T., Yang, C.E.: Robust observer-based output feedback control for fuzzy descriptor systems. Expert Syst. Appl. 40(11), 4503–4510 (2013)
Huang, C.P.: Stability analysis and controller synthesis for fuzzy descriptor systems. Int. J. Syst. Sci. 44(1), 23–33 (2013)
Ren, J., Zhang, Q.: Simultaneous robust normalization and delay-dependent robust H∞ stabilization for singular time-delay systems with uncertainties in the derivative matrices. Int. J. Robust Nonlinear Control 25(18), 3528–3545 (2015)
Ding, Y., Weng, F.: Robust decentralized stabilization of large-scale singular systems via proportional-plus-derivative state feedback. Int. Conf. Adv. Comput. Theory Eng. (ICACTE) 4, 320–324 (2010)
Kwon, W., Kang, D., Park J., Won, S.: Decentralized guaranteed cost control for uncertain large-scale singular systems via proportional-plus-derivative state feedback. Asian Control Conference (ASCC), pp. 1-6, 2015
Lozano, R., Brogliato, B., Egeland, O., Maschke, B.: Dissipative Systems Analysis and Control Theory and Application. Springer, London (2000)
Chang, W.J., Chang, Y.C., Ku, C.C.: Passive fuzzy control via fuzzy integral Lyapunov function for nonlinear ship drum-boiler systems. ASME 137(4), 15 (2015)
Chang, W.J., Chen, P.H., Ku, C.C.: Mixed sliding mode fuzzy control for discrete-time nonlinear stochastic systems subject to variance and passivity constraints. IET Control Theory Appl. 9(16), 2369–2376 (2015)
Chang, W.J., Chen, P.H., Ku, C.C.: Variance and passivity constrained sliding mode fuzzy control for continuous stochastic nonlinear systems. Neurocomputing 201, 29–39 (2016)
Li, Q., Zhang, Q., Yi, N., Yuan, Y.: Robust passive control for uncertain time-delay singular systems. IEEE Trans. Circuits Syst. I Regul. Pap. 56(3), 653–663 (2008)
Sun, Y.G., Xu, J.Q., Chen, C., Lin, G.B.: Fuzzy H∞ robust control for magnetic levitation system of maglev vehicles based on TS fuzzy model: design and experiments. J. Intell. Fuzzy Syst. 36(2), 911–922 (2019)
Xu, J., Fang, H., Zhou, T., Chen, Y.H., Guo, H., Zeng, F.: Optimal robust position control with input shaping for flexible solar array drive system: a fuzzy-set theoretic approach. IEEE Trans. Fuzzy Syst. 27(9), 1807–1817 (2019)
Nguyen, N.T.: Lyapunov Stability Theory. Springer, Cham (2018)
Mu, Y., Zhang, H., Sun, S., Ren, J.: Robust non-fragile proportional plus derivative state feedback control for a class of uncertain Takagi-Sugeno fuzzy singular systems. J. Franklin Inst. 356(12), 6208–6225 (2019)
Mu, Y., Zhang, H., Sun, J., Ren, J.: Proportional plus derivative state feedback controller design for a class of fuzzy descriptor systems. Int. J. Syst. Sci. 50(12), 2249–2260 (2019)
Zhang, G., Xia, J., Zhang, B., Sun, W.: Robust normalisation and P-D state feedback control for uncertain singular Markovian jump systems with time-varying delays. IET Control Theory Appl. 12(3), 419–427 (2018)
Acknowledgements
This work was supported by the National Science Council of the Republic of China under Contract MOST109-2221-E-019-049. It was also supported by the University System of Taipei Joint Research Program under Contract USTP-NTUT-NTOU-109-03.
Author information
Authors and Affiliations
Corresponding authors
Rights and permissions
About this article

Cite this article
Chang, WJ., Lian, KY., Su, CL. et al. Multi-constrained Fuzzy Control for Perturbed T–S Fuzzy Singular Systems by Proportional-Plus-Derivative State Feedback Method. Int. J. Fuzzy Syst. 23, 1972–1985 (2021). https://doi.org/10.1007/s40815-021-01096-9
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40815-021-01096-9