
Abstract
Anthropomorphic testing devices (ATDs) used in vehicle crash testing are the industry standard for occupant safety research, but they are expensive and complex equipment. The purpose of this research was to develop and build a simplified dummy and sled for a low-impact frontal crash. The design of the simplified ATD was inspired by the commercially available crash test dummy ECE-R16 model. The dummy was designed such that it matched weight and center of gravity of an adult passenger. A pendulum was created for imposing an impact force to the sled accommodating the dummy. This simplified ATD was used to measure acceleration based injury criteria. The experimental results were compared with a Finite Element (FE) simulation of the Hybrid III dummy in a 2002 Ford Explorer. The simplified physical experiment results followed a similar trend as the FE Hybrid III simulation results.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction and Background
Physical anthropomorphic dummies are expensive and complicated tools essential in occupant safety research. The purpose of this research is to develop a simplified physical anthropomorphic dummy with similar biofidelity functions as high-end dummies such as Hybrid III [1], Manikin ECE-R16 [2], and THOR [3]. The development of sled and impact pendulum was based on the need to measure the acceleration crucial to occupant safety. ATD’s come in many types and sizes. Some are made especially for frontal crash testing while others are made for side or rear impacts. However, they all serve the purpose of improving occupant safety.
This research focused on developing a simplified crash test dummy for frontal crash. The Hybrid III was used to evaluate the biofidelity of the simplified ATD design. The ECE-R16 manikin dummy is a simpler ATD compared to the Hybrid III. It represents a 50th percentile male to be used for testing vehicle seatbelts. Because of this purpose, it has no arms and only one lower extremity. It consists of six parts; head, neck, torso, upper arms, and one lower leg connected by joints in mid-sagittal plane. However, the Hybrid III 50th percentile dummy is a popular crash test dummy used in the crashworthiness and occupant safety research. It was designed and developed in the 1970’s by General Motors Corporation to predict injury in occupant safety testing [1]. It is more detailed and can provide more functions that the ECE-R16 cannot. The Hybrid III provides injury measurements such as acceleration based and deflection based injury criteria. The goal was to develop and create a simplified ATD that can mimic the biofidelity of the Hybrid III. This allows the simplified ATD to be used in further frontal crash testing.
Methodology
Simplified ATD
The ECE-R16 model was developed to test vehicle seatbelt in crash testing. Written permission of referring to this specific model for the current work was obtained. This ECE-R16 model was chosen as the prototype because of its lower complexity than other commercially available ATD models e.g., the Hybrid III and THOR in terms of design and manufacturing. The simplified ATD was designed in Solidworks (Version 2014, Dassault Systèmes SOLIDWORKS Corp.) as shown in Fig. 1. The design was handed over to the machine shop to be fabricated. The general dimensions of the simplified ATD are listed in Table 1. The head is a rectangular shape with a length of 191 mm, width of 153 mm, and height of 216 mm. The width of the shoulder is 930 mm. The rib cage consists of six ribs. The width of the hip is 201 mm. The lengths of the upper and lower legs are 554 mm and 579 mm respectively. The main material chosen for this development is aluminum because it is robustness suitable for impact.

Schematic of the simplified ATD
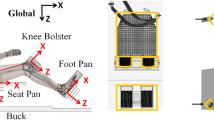
The simplified ATD consists of head, neck, torso, upper legs, lower legs and feet. These parts are connected together by joints which allow rotational movement about specific axes. To make the testing ATD have a similar weight of a 50th percentile male adult, cast iron blocks were attached to the spine and thighs of the testing ATD as weight blocks. The total weight of the testing ATD is approximately 73 kg. These weight blocks were allocated in such way that the center of gravity (CG) coordinates of the testing ATD is corresponding to the CG coordinates specified in the ECE-R16 user manual as shown in Fig. 2. The CG coordinates of the testing ATD, shown as the blue dot, are (199 mm, 256 mm) relative to the origin (dark green dot) at (200 mm, 200 mm). The ECE-R16 CG coordinates were (188 mm, 256 mm). It is important that the center of gravity is identical in respect to the human body. One study shows this importance by measurement center of gravity of 69 human subjects. The results were validated using the Manikin ATD [4]. The center of gravity dictates the motion of the occupant inside the vehicle.

Position of the simplified ATD and the seat
Considering that the geometry of the head is not a strict related variable to the present work, the head of ATD was simplified to be a hollow rectangular aluminum box. A sheet was fixed in the middle of the box which serves as a bed plate for the accelerometer. A 3-axial accelerometer was installed at the center of gravity of the ATD’s head to measure the acceleration experienced by the testing ATD’s head during the impact.
The neck of the ATD model consists of 6 aluminum/rubber discs tightened by a roller chain and a chain tensioner. The rubber discs allow the neck to be able to sustain bending, extension or contraction while the aluminum discs maintain their shapes. The material consists of aluminum, polyurethane, and neoprene rubber. The durometer for the polyurethane is 40 OO (ultra-soft). A roller chain going through these discs tightens these discs together with a chain tensioner. The neck is connected to the head through the top disc by a shaft and is connected to the spine through the bottom block by a bolted connection. Schematic of neck could be seen in Fig. 3.

Neck configuration including top disc and bottom block
The torso of the simplified ATD consists of a rigid spine and a pair of shoulders and the ribs, as shown in Fig. 4. The material for these three parts is aluminum, taking the advantage of the high strength to weight ratio. A piece of U-channel and two pieces of sheets were welded together to form the spine. On the top of the upper deck sits the bottom block of the neck. The lower deck connects the spine to the hip joint. Ribs were made of aluminum strips and were installed to the spine by a bolted connection. The whole rib cage and the shoulders offer the necessary geometry for the seatbelt to conform and restrain the ATD’s body.

Configuration of torso (L) and hip joint (R)
The hip joint is the part that connects the upper body and lower body. It allows the upper body and lower body to rotate around a specific axis (Fig. 4). Both the upper body and lower body connection were bolted. The testing ATD has upper legs and lower legs and feet (Fig. 5). The upper legs were bolted to the slots welded on the hip-joint at their upper ends while the lower ends were bolted to the knee joints. The knee joints allow upper legs and lower legs to rotate about the horizontal axis separately. Two pieces of deformable rubber tubes were place inside the knee joint, and bolts were placed through the tubes. The outer surface of the rubber tube and inner surface of the knee joints have been roughened to increase friction between the surfaces. When the bolts were fastened, the nuts and washers compressed the rubber tubes in the radial direction, i.e., against the inner surface of the knee joint, which increased the friction between the external surface of the rubber tube and internal surface of the knee joint. Therefore, the angle between upper leg and lower leg can be fixed at a desired value. When adjustment was needed, loosening the bolts could reduce the friction and let the upper and lower legs free to rotate. Due to the relative hardness of two type of materials, abrasion mostly happens on rubber tube rather than the aluminum. Replaceable rubber tubes can help keep the knee joints working as expected.

Configuration of lower extremities
Sled
The sled test device comprised of two parts, the sled rig and the impact pendulum. The sled rig, which simulates the driving compartment of a vehicle, accommodates the seat and the seatbelt restrain system. The whole sled rig is made of steel tubes welded together. It was designed and built such that it can withstand the impact of the pendulum many times. The overall dimension of the sled rig is 2.1 m (length) × 0.9 m (width) × 2.4 m (height).
The sled rig was fitted with a vehicle seat and seatbelt taken from an actual vehicle as shown in Fig. 6. The seatbelt anchor was made to be adjustable. It also has an angled foot rest to simulate the gas pedal for the right foot. Rollers were installed for ease of moving the sled; they can be removed easily for the experiment.

Sled with the testing ATD
The seat was bolted to the sled rig through four anchors. The adjustable seat tracks were not included. The back cushion of the seat is functional and it can rotate and hold to a specific angle. A standard three-point seatbelt system was chosen. All the three anchors are bolted to the main structure of the sled rig. The pillar loop anchor can be adjusted vertically where height is one of the testing parameters.
The limitation of the rigid sled rig is its capability to simulate the actual response of a real vehicle crash. During a real crash, the vehicle deforms in a designed way to absorb kinematic energy and protect the driver during specific impact speed, e.g., 56.4 km/h, while for the sled, all the kinetic energy is transferred to the testing ATD. However, a relative low impact speed is utilized for the present work such that the deformation of an actual vehicle and present sled is considered more realistic.
The impact pendulum consists of cast iron bars that are housed inside a steel sheet box. It weighs approximately 68 kg. The dimensions are 30.5 cm in length, 21.0 cm in width and 14.6 cm height. This impact pendulum was designed to be accelerated by gravity. During the tests, the impact pendulum was lifted by a crane to 1.15 m high, inclined manually, and released to swing to provide the impact pulse.
The peak pre-impact velocity of the impact pendulum was computed by calculating the conversion of potential energy at its inclined position and kinetic energy at its pre-impact position, i.e., at the bottom at its swing (Δh = 0.2 m). The amount of energy that has been consumed in terms of heat and sound is assumed to be insignificant and negligible. In a crash without deformation, i.e., sled test, the impact speed is specified as the Equivalent Energy Speed (EES) [5]. The formulas are as follows:
where m is the mass of the impact pendulum, g is the gravity constant, h is the height of the pendulum.
Currently, there are two widely acceptable configurations regarding the frontal crash test. The first one was developed by the agency NHTSA based on FMVSS 208. The testing protocol is utilized in the New Car Assessment Program (NCAP) in which the testing vehicle crashes at a speed of 30 mph into a rigid barrier that covers the full width of the vehicle. The other one is developed by the Insurance Institute of Highway Safety (IIHS), an independent organization which carries out research, conducts tests and produces ratings for passenger vehicles.
Compared to the full-width tests, a smaller part of the structure of the vehicle has to deal with the crash energy during offset tests. Therefore, it is more challenging for the structure of the vehicle to maintain intact. Whereas in the full-width tests, more part of the structure of the vehicle is taking part into crumple resulting in less crush in such way that the deceleration that the restraint system has to handle is greater. The offset tests are more demanding of the integrity of the vehicle structure but less demanding of restraint system while the reverse is true in full-width tests [6]. Considering the objective of the present work which is to investigate the effect of driving postures rather than to assess the performance of the structure of the vehicle, a full-width frontal crash testing configuration is considered more suitable.
It should be noted that the current testing speed is far below the testing speed specified in the widely used frontal crash standards. The crash test serves for the purpose of measuring how well a passenger vehicle would protect its occupant during a serious crash accident. The injury of the occupant comes from two adverse effects of an accident, rapid deceleration of the occupant compartment and crush of the occupant compartment survival space. The improving structural design manages to mitigate these two adverse effects. To evaluate the performance of the structure of a vehicle, the test conditions are necessary to be representative of the real world crash environment in which the passenger vehicles are exposed. Thus, the U.S. New Car Assessment Program (NCPA), developed by the NHTSA, employed an impact speed of 35 mph, crashing into a fixed barrier. This test condition could represent the situation of a vehicle moving at 70 mph striking an identical parked vehicle or two identical vehicle moving toward each other at 35 mph [7]. Considering the great kinetic energy carried by the testing vehicle with the impact speed of 35 mph, the testing vehicle is always completely destroyed after the crash. Other researchers have used lower impact speeds to evaluate occupant safety. In a study involving 50th percentile male live human subjects in low-speed front sled tests, the average velocity used was 9.7 km/h. The achievable velocity used in this experiment is 7.1 km/h. This comparison shows that frontal sled tests can be conducted in a low-speed setting [8]. In another similar study, the low-speeds used were 9.7 km/h and 4.8 km/h. Our experiments speed of 7.1 km/h falls in the middle of the two [9].
Instrumentation
The tests were conducted in the structures laboratory of College of Engineering. The sled rig was fixed on ground in an open area of the laboratory. A chain link was attached to the pendulum. Marks on the chain helped ensure for experiment run, the pendulum was lifted to the same height to provide the same peak pre-impact velocity. Rubber dampers were installed in the middle of the extended arms of the sled rig for the point of pendulum impact. It reduced the vibration of the sled rig and lessened the noise in the collected acceleration data. It also reduced the possible potential damage to the sled rig.
The simplified ATD was seated on the vehicle seat mounted on the sled rig. It was secured by the standard three-point seatbelt system. In order to determine the accelerations of head and torso of the testing ATD, a Summit Instruments 35200B Digital/Analog Accelerometer was mounted both at the center of gravity of head and geometric center of torso. A National Instruments NI cDAQ-9172 data acquisition platform as well as a National Instruments NI-9239 channel to channel isolated analog input module, were utilized to collect the acceleration data. The acceleration data were recorded by the computer program LabVIEW (Version 2014, National Instruments.). The sampling rate of the accelerometer was 1612 readings per second. To obtain the occupant injury measurements, the raw data needed to be filtered using the appropriate Channel Frequency Class (CFC). The head acceleration and chest acceleration measurements should be filtered using CFC-1000 and CFC-180 respectively [10].
During the execution of the experiment, the impactor was raised, released, and swung freely into the sled rig. The accelerometers installed on the ATD recorded the acceleration. The accelerometers were mounted in such way that their axes follow the coordinate system convention specified in SAE J211–1(2007): Instrumentation for Impact Test, Part 1, Electronic Instrumentation [11].
Finite Element Simulation
The finite element simulation was setup according to the Federal Motor Vehicle Safety Standards and Regulations (FMVSS) no. 208 for 2002 Ford Explorer and Hybrid III dummy as shown in Fig. 7. It contains detailed information and results on the physical frontal crash testing of said vehicle [12]. The physical Hybrid III was developed and validated using a series of tests [13]. The non-deformable steel components of the dummy are modeled as elastic material type 1 in LS-DYNA. The dummy’s polyvinyl skin was modeled as visco-elastic material type 6. The foam and rubber components were modeled as Blatz-ko rubber type 7 and viscous foam type 62 respectively. The dummy model consists of 292,231 nodes, 256 beam, 226,452 shell, and 225,638 solid elements. The dummy weighs 79 kg and 5′-9″ upright height which represents the average 35 year old male [14]. We do not have the equipment or the resources to create these tests to validate our simplified dummy. Instead, we compare the simplified dummy experiment results with that of the FE simulation of the Hybrid III under the same settings.

FE simulation setup
After successfully positioning the dummy akin to that of the FMVSS report, a three-point seatbelt was created and fitted onto the dummy. The seatbelt fitting was done through “Beltfit” keyword function in LS-PrePost. The seatbelt used was a mixed seathbelt that consisted of shell elements connected with Contrained Nodal Rigid Body (CNRB) to beam elements. The beam elements were anchored to the vehicle. A seatbelt can only provide in-plane resistance so the shell element formulation was set as Belytschko-Tsay membrane element. This formulation allows only in-plane stiffness whereas traditional shell elements provide both in-plane and out-of-plane stiffness.
The shoulder belt portion was looped through a slipring to form the lap belt portion. This was accomplished by first creating the shoulder belt and lap belt portions using the last node of the shoulder belt as the first node of the lap belt. That node was duplicated and formed as the slipring node. This allows the seatbelt beam elements to slip through the node to prevent excessive deflection in the torso and hip. The offset used in the belt fitting was 1 mm from the surface of the dummy. The thickness of the torso jacket was 0.01 mm while the thickness for the pelvis block was 6 mm. This caused a problem with excessive slack in the seatbelt. This was solved by first decreasing the thickness of the pelvis down to 0.01 mm and then recover the pelvis thickeness after the completion of seatbelt fitting. The belt’s loading and unloading curves were created as a linear curve reaching a value of 10 kN at 12% percent strain. The Automatic_Surface_To_Surface contact card was used. The “automatic” always considers thickness offsets and has no segment orientation which allows it to consider both directions. The “SOFT” parameter was set to 1 for contact between soft materials (e.g. dummy) which prevents negative volume errors.
The model was validated by comparing results from the FE simulation to the FMVSS no. 208 report. The same speed of 56.4 km/h was used as same as the speed used in the report. The chest acceleration between the FE Simulation and FMVSS no. 208 report match fairly well. The two curves have similar peak values approximately 50 g’s. The minor differences exist due to the absence of an airbag.
After validation of the simulation model, the simulation impact speed was changed to 7.1 km/h as dictated by the physical experiment. The physical experiment and the finite element simulation were the same in terms of dummy positioning, impact speed, and absence of airbag. This was done to compare the results of the physical experiment with the finite element simulation. Since the sled does not crumble like an actual vehicle would and in order to compare the FE simulation with the sled tests, the deformable to rigid card was used to turn the vehicle into a rigid vehicle at the beginning of the crash to minimize the crumbling.
Results
A major difference between the FE simulation and the physical experiment is the method at which is the impact occurs. The sled is stationary and is impacted by a pendulum which causes changes in acceleration in the dummy accelerometers as opposed to the simulation where the vehicle impacts a rigid wall. The simplified dummy physical experiment was conducted twice and the results were compared to that of the finite element simulation as shown in Figs. 8 and 9. After two repetitions, the results show similar trends but most importantly, they show the same peak acceleration. The peak value determines the injury in a crash. The simplified ATD results show similar results but they were lower than that of the FE results. All three head acceleration curves show similar slopes but the FE simulation shows continue increase to a peak of 5 g’s. The simplified physical experiment shows two distinct peaks while the FE simulation shows a larger peak along with a smaller hump. The FE simulation shows a steeper decline than the physical experiment. The construction of the neck differs from that of the Hybrid III therefore, results may differ but overall, the head accelerations between the FE simulation and physical experiment show similar trends. The percent differences with respect to the FE simulation for experiment runs #1 and #2 are 25.5 and 27.5% respectively Fig. 10.

Chest acceleration comparison between FE simulation and FMVSS no. 208

Comparison of head accelerations between FE Simulation and selected experiments

Comparison of chest accelerations between FE simulation and selected experiments
To investigate injury, the injury criteria are assessed. The head acceleration is involved in calculating the Head Injury Criterion [15]. It is a quantitative method to measure head injury. HIC is derived by taking the highest acceleration change under the period of 15 msec. The following equation is used to measure the criterion:
where t1 and t2 are any points of arbitrary time that make up 15 msecs and should result in the highest change in acceleration. Accerleration and time are measured in gravity acceleration (g’s) and seconds respectively. Initially, NHTSA proposed a period of 36 msecs but based on human volunteer testing, the probability of injury during a longer duration was low. Finally, it was proposed that 15 msecs was the period of time that yields the maximum HIC value [15]. The proposed threshold limit is 700 for both the 50th percentile male and 5th percentile female. The calculated HIC15 for the FE simulation is 2.04. The calculated HIC15 for the physical experiments run #1 and run #2 are 1.24 and 1.17 respectively. These values are very low compared to large values a standard impact test would yield.
The chest resultant accelerations of the two simplified physical dummy repetitions show nearly identical results which is a good indicator that the physical tests were carried out consistently. The percent differences with respect to the FE simulation for experiment runs #1 and #2 are 2.0 and 4.9% respectively. The FE simulation is also similar to the two repetitions with the exception of the beginning which is also evident in the head resultant acceleration. The FE simulation curve’s incline and decline slopes show consistent increase in acceleration while the physical experiment repetitions show less smooth slopes. All three chest acceleration curves show a peak value of 5 g’s. Overall, the chest accelerations between the FE simulation and physical experiments show similar trends. The simplified dummy’s chest correlates well with that of the Hybrid III.
The chest injury criterion is different from the head injury criterion. The Thoracic Injury Criterion (TIC) is represented by the Combined Injury Index (CTI). Through human surrogate testing, it was determined that injury is caused by both chest acceleration and deflection. The index is determined as follows:
It is computed by taking the sum of maximum acceleration over acceleration limit and maximum deflection over deflection limit. Focusing solely on the 50th percentile male, the index limit is 1. The index value is lower for 5th percentile female and children. The acceleration limit and deflection limit is set as 90 g’s and 103 mm respectively. These two values are only to be used in determining the CTI. The individual values for acceleration and deflection are 60 g’s and 63 mm respectively. In this study, the deflection portion is not investigated because the simplified ATD does not contain deformable material that can express deflection. This is a limitation to the design of the ATD.
Conclusion
A simplified ATD was developed that can be used as a low-cost alternative for vehicle safety research. The ATD was validated by comparing physical experiment and FE simulation. We ran both the simplified physical experiment and FE simulation under the same settings. FE simulation was conducted with a Hybrid III FE dummy model that was validated with another crash testing. The physical simplified dummy experiment results match the FE Hybrid III simulation results. The physical experiment accelerations yield a lower peak value than the FE simulation. The experiment runs #1 and #2 yielded 25.5 and 27.5% respectively lower values than the FE simulation for the head acceleration. As for the chest acceleration, experiment runs #1 and #2 yielded 2.0 and 4.9% respectively higher values than the FE simulation. The simplified ATD may be used as a low-cost alternative for the ECE-R16 or the Hybrid III, when only acceleration response of the dummy is needed. However, when the flexibility of the model is important, ECE-R16 or Hybrid III shall be used.
References
Backaitis S, Mertz H. Hybrid III: The first human-like crash test dummy. Society of Automotive Engineers 1994
Humanetics. 2014 Hybrid III 50th Male Dummy. Humanetics Innovative Solutions <http://www.humaneticsatd.com/crash-test-dummies/frontal-impact/hybrid-iii-50th>. Accessed 2014
NHTSA. Biomechanical Reponse requirement of the THOR NHTSA advanced frontal dummy. National Highway Traffic Safety Administration; 2005
Yoganandan N, Pintar FA, Zhang J, Baisden JL (2009) Physical properties of the human head: mass, center of gravity and moment of inertia. J Biomech 42:16
Berg FA, Walz F, Muser M, Buerkle H, Epple J. Implication of velocity Change Delta-V and energy equivalent speed EES for injury mechanism assessment in various collision Configurations. International Research Council on Biomehcnanics of Injury Conference 1998; Goeteborg, Sweden.
Park BT, Partyka SC, Morgan RM, Hackney JR, Lee J, Summers L, Lowrie JC, Beuse NM (2000) Comparison of vehicle structural integrity and occupant injury potential in full-frontal and offset-frontal crash tests. SAE Transactions 109:1483–1501
Hershman LL (2001) The US new car assessment program (NCAP): past. In: Present and future
Kemper A, Beeman S, Duma S. Effects of Pre-Impact Bracing on Chest Compression of Human Occupants in Low-Speed Frontal Sled Tests. SAE Journal 11, 2011
Beeman S, Kemper A, Madigan M, Franck C (2012) Occupant kinematics in low-speed frontal sled tests: human volunteers, hybrid III ATD, and PMHS. Accid Anal Prev 47:128–139
Huang M. Vehicle Crash Mechanics. Boca Raton, FL: CRC Press; 2002
SAE S. J211–1 Instrumentation for Impact Test—Part 1—Electronic Instrumentation. SAE International 2007
Ivory M, Richardson F (2001) New Car Assessment Program Frontal Barrier Impact Test: 2002 Ford Explorer XLT 4WD SUV. In: Transportation USDo. U.S. Department of Transportation, Washington, D.C.
Mohan P, Marzougui D, Kan C (2009) Development and validation of hybrid III crash test dummy. SAE Technical Paper 1:0473
Mohan P, Park C, Marzougui D, Kan C, Guha S, Maurath C, D. B. LSTC/NCAC Dummy Model Development. 11th International LS-DYNA Users Conference. Dearborn, MI2010
Eppinger R, Sun E, Bandak F, Haffner M, Khaewpong N, Maltese M (1999) Development of improved injury criteria for the assessment of advanced automotive restraint systems - II. In: Administration NHTS (ed) National Highway Traffic Safety Administration, p 180
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Fung, K., Xu, R., Jung, S. et al. Development and Testing of a Simplified Dummy for Frontal Crash. Exp Tech 43, 7–14 (2019). https://doi.org/10.1007/s40799-018-0261-2
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40799-018-0261-2