
Abstract
In this note we survey a selection of classical results and recent advances concerning our understanding of spaces of positive scalar metrics on closed manifolds, and describe how the basic questions can be transplanted to compact manifolds with boundary, a setting that naturally connects to the study of data sets in general relativity. Special emphasis is devoted to highlighting links with nearby fields and discussing some promising future directions.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
The concept of shape arguably stands among the most fundamental ones in Mathematics. Along the course of the centuries it has been formalised in diverse ways, and Riemannian geometry can be described as the subject where this task is accomplished by introducing the notion of curvature. A typical question one would like to answer is, for instance,
What is it that makes a plane different from a sphere?
which amounts to properly encoding, in a quantitative fashion, the intuitive ideas of flatness and roundness we naturally associate to these objects.
Yet, as soon as one goes beyond the study of curves and surfaces it is easily realised that, so to say, there is not just one but many different notions of curvature, which encode different properties and are fit for modelling different classes of geometric phenomena. This survey aims at briefly presenting one of these notions, that of scalar curvature, providing an overview of some of the recent developments and connecting them to classical landmarks in the field.
1 Introduction
Let \(X^n\) denote a smooth manifold of dimension \(n\ge 2\). If we add a Riemannian metric g, we have a good notion of distance, hence an effective way of differentiating vector fields along curves (by means of the Levi-Civita connection) and, thereby, gain a well-defined tensor, the Riemann curvature tensor, which contains the information about the value of all sectional curvatures of (X, g) at any given point. Recall that when \(n=2\) the only sectional curvature coincides with the Gauss curvature of the surface in question. This notion has now been studied for almost two centuries, and the pioneering contributions by Bonnet, Minding, Liebmann and Hilbert (among others) have played an important role in opening the way to modern Riemannian geometry. For instance, their study shed light on the classification of complete surfaces of constant Gauss curvature and on the characterisation of those, within such a list, admitting an isometric embedding in Euclidean \({\mathbb {R}}^3\).
There are at least three different perspectives one can take in order to introduce the notion of scalar curvature. The first, and by far best-known definition has to do with the second trace of the Riemann tensor. So, if we take a local orthonormal frame \(\{e_i\}_{i=1,\ldots ,n}\) on (X, g), the Ricci curvature is given by
and the scalar curvature is
thus a smooth function \(R_g:X\rightarrow {\mathbb {R}}\). Hence, the scalar curvature is the sum of the sectional curvatures of X at the point in question. It is apparent, from this definition, that when \(n>2\) this function should only retain some partial amount of information about the shape of the Riemannian manifold (X, g) or that, in other words, a lot of content should be lost because of this algebraic operation of trace (which corresponds to averaging with respect to all 2-dimensional linear subspaces of the tangent space). We now know how this intuition is only partially correct, and that highly unexpected rigidity phenomena arise, showing that seemingly mild restrictions on the scalar curvature of a manifold may have rather dramatic global implications.
The second definition has a more straightforward geometric character. Indeed, it descends from observing that, in the setting above, it holds for the volume of small geodesic balls centered at a point \(x\in X\) the asymptotic expansion (proven e.g. in [21, Theorem 3.3])
for \(\delta \) the Euclidean metric on \({\mathbb {R}}^n\), and that this property characterizes the scalar curvature function. Such a formula (suitably combined with the corresponding one for the area of the boundary of small geodesic balls) also suggests that isoperimetric sets of small volume tend to localise around maxima of the scalar curvature (which is indeed the case, see [58] and [17]). The reader may wish to compare, at a conceptual level, these results with classical facts connecting the Ricci curvature to the behaviour of geodesics, such as the Bonnet–Myers theorem.
The third definition, advocated by Gromov (see [23]), introduces the scalar curvature from a purely axiomatic perspective as the only (smooth) function satisfying certain universal properties. Since these axioms, on which we shall not digress, are easily checked to be satisfied by the standard definition of scalar curvature, the real point of Gromov’s claim is that the scalar curvature function is in fact uniquely identified by such a set of very soft requirements.
To get a deeper understanding of the geometric content of this notion, we need to get back to shapes, which means (as it often happens) to investigate the specific restrictions imposed on a Riemannian manifold when we know it satisfies, say, certain pointwise bounds on the scalar curvature. For the sake of definiteness, we will primarily focus on two questions.
Question 1.1
What manifolds can be endowed with a positive scalar curvature metric?
In other words, here we wonder whether there is some sort of algorithm or descriptive procedure which takes as input a manifold X and produces as output an affirmative or negative answer depending on whether the manifold in question can or cannot be endowed a ‘positively curved’ metric as encoded by means of the scalar curvature function.
Question 1.2
If we set \({\mathcal {R}}:=\{ g {\ :\ }R_g>0 \}\) what is the homotopy type of this space?
Of course, it can be argued that the first question is, in fact, a special case of the second, but we prefer to distinguish them for expository convenience. Also, note that from a certain viewpoint it is more natural to look at the space \({\mathcal {R}}\) modulo the pull-back action of the diffeomorphism group of X, namely at the moduli space \({\mathcal {R}}/\mathcal {D}\).
Remark 1.3
A priori one can ask these questions in any of the following three cases:
-
X compact, \(\partial X = \emptyset \);
-
X compact, \(\partial X \not = \emptyset \);
-
X non-compact.
However, in the last two cases both of them are actually trivialised by the absence of suitable boundary conditions or conditions at infinity (as we will discuss in more detail later). On the contrary, for closed manifolds the two questions above played a key role in geometric analysis over the last fifty years while remaining, at the same time, still wildly open.
In the case of surfaces, namely for \(n=2\), it is possible to answer both questions by means of fairly classical tools. Indeed, a straightforward application of the Gauss–Bonnet theorem gives that \({\mathcal {R}}\ne \emptyset \) only if \(X^2\) is either a sphere \(S^2\), or its quotient \(\mathbb {R}\mathbb {P}^2\) (and of course in both cases \({\mathcal {R}}\) is in fact not empty for we can just consider round metrics). About Question 1.2, an old result by Weyl [81] asserts that \(\mathcal {R}\), when not empty, is path-connected, which was then (much later) improved by Rosenberg-Stolz, who sketched in [64] the argument to conclude that this space is actually contractible. Incidentally, it is interesting to note how Weyl’s theorem arose in an attempt of attacking the problem of isometrically embedding spheres of positive Gauss curvature as convex bodies in \({\mathbb {R}}^3\) by means of what we would now call method of continuity; such an embedding problem was then solved by Nirenberg in one of his very first papers [59].
In general, when \(n\ge 3\) the story is a lot longer. Before embarking in a (necessarily partial) description of what we know about it, we note how one may first wonder why we posed the questions above for metrics with positive scalar curvature and not, for example, for metrics with negative scalar curvature. The reason is that, as we are about to see, there is a clear ‘broken symmetry’ between the positive and the negative scalar curvature cases. In particular, the following statement holds:
Theorem 1.4
If \(n\ge 3\), all closed smooth manifolds \(X^n\) support metrics of negative scalar curvature.
To the best of our knowledge, this result was first proven by Aubin in [1]. Here we will instead informally describe a totally different argument, which we learnt from Schoen. The rough idea behind this approach is to choose any Riemannian metric on the manifold X and then attach to X a sphere with a (microscopically scaled) metric of negative scalar curvature, thereby getting on X a metric whose total scalar curvature attains a very large negative value. At that stage, one only needs to ‘spread the negative scalar curvature’ uniformly. More precisely, the argument proceeds in three steps.
First of all, one proves that if \(n\ge 3\), then \(S^n\) has a metric \(g_-\) of negative scalar curvature. In Appendix A we present the proof for the case \(n=3\), when the negative scalar curvature metric can be found even left-invariant (once we identify, as it is rather standard, \(S^3\) with SU(2)). For \(n>3\) the metric \(g_{-}\) is obtained by suitably smoothing two n-dimensional discs, whose boundaries are identified so to have negative scalar curvature in a distributional sense (cf. [54]).
Secondly, we recall how for all \(n\ge 3\), the ‘two-ended Schwarzschild manifold’
is scalar flat. Chosen any Riemannian metric \(g_0\) on X, we glue \((X,g_0)\) with \((S^n, g_{-})\) employing a Schwarzschild neck whose mass parameter is wisely chosen. We then denote by g the resulting metric on X. This whole construction can be performed so that the total scalar curvature E(g) is as close as we wish to \(E(g_0)+E(g_{-})\), where \(E(g) = \int _X R_g\) stands for the Einstein–Hilbert action functional. So, by the scaling properties of the scalar curvature, it holds \(E(\lambda ^2g_-) = \lambda ^{n-2}E(g_-)\), which attains arbitrarily large negative values once we pick \(\lambda >0\) sufficiently large.
Lastly, we face the problem that the manifold (X, g) could still have some regions where the scalar curvature is positive. To resolve this issue, both elliptic and parabolic methods can be applied. The simple result needed to implement the former strategy is provided in Appendix B.
Remark 1.5
The space of metrics of negative scalar curvature on any given closed manifold has been studied by Lohkamp in [49], who proved that this space is always contractible.
Remark 1.6
It is in fact the case that any closed 3-manifold actually supports metrics of negative Ricci curvature, as proven by Gao and Yau in [20].
In contrast to Theorem 1.4, smooth manifolds for which \({\mathcal {R}}=\emptyset \), namely that do not support any metric of positive scalar curvature exist in abundance. The simplest class of examples is provided by n-dimensional tori
For indeed:
Theorem 1.7
If \(n\ge 3\), the n-dimensional torus does not support any metric of positive scalar curvature. In fact, if g is a metric on \(T^n\) with \(R_g\ge 0\), then g is flat.
Roughly speaking, there are two different ways of proving this statement. The first, due to Schoen and Yau, relies on the use of minimal hypersurfaces together with a downward dimensional inductive scheme. While conceptually neat, it has the disadvantage of breaking down when the ambient dimension is larger than eight (although a more sophisticated extension, that is claimed to hold in all dimensions was recently presented in [69]). The second proof, due to Gromov and Lawson, makes use of harmonic spinors hence ultimately relies on the spin structure \(T^n\) inherits as a quotient of \({\mathbb {R}}^n\). For this reason, the latter approach (while imposing no dimensional restrictions) does not necessarily extend to classes of manifolds, such as e.g. those admitting a degree one map to tori, for which the Schoen–Yau method works without additional effort.
Sketch of proof of Theorem 1.7
We follow here the mean curvature approach in [70, 72, 73], and we restrict our discussion to \(n=3\) for simplicity. Let us start with the first statement. So, if \(g\in \mathcal {R}\) were a positive scalar curvature metric on \(T^3=S^1\times S^1\times S^1\) we could simply minimize, appealing to standard results in geometric measure theory, the area functional within a suitable (non-trivial) homology class, so to obtain an area-minimizing (closed, embedded) surface \(\Sigma \) of genus one. In particular, \(\Sigma \) would then be a stable minimal surface, hence the second derivative test would give
where A denotes the second fundamental form of \(\Sigma \) and K its Gauss curvature. Hence, choosing \(\varphi =1\) as our test function, and exploiting our assumption on the sign of \(R_g\) we derive that \(\Sigma \) should have positive Euler characteristic, a contradiction.
The second claimed statement is proven by ultimately appealing to the first, as we now explain. If we denote by g a Riemannian metric on X of non-negative scalar curvature, we can consider the evolution problem (known as Hamilton’s Ricci flow, see [27]) given by
which is uniquely solvable at least on some interval \((0,\tau )\) for some \(\tau >0\). The scalar curvature evolves under the nonlinear equation \(\partial _t R_{g(t)}=\Delta _{g(t)}R_{g(t)}+2 |{{\,\mathrm{Ric}\,}}_{g(t)}|^2_{g(t)}\) thus a standard application of the parabolic maximum principle ensures that, in fact, the scalar curvature of the metric, say, \(g(\tau /2)\) is strictly positive at all points whenever g is not Ricci flat. Hence, exploiting the first statement we proved, we conclude that g must be Ricci flat hence, since \(n=3\), it must in fact be a flat metric, as we wanted to prove. \(\square \)
Remark 1.8
We remark that Theorem 1.7, in the (slightly) more general form for closed manifolds admitting a degree one map to tori, implies the positive mass theorem by means of a beautiful, and by now classical, compactification argument due to Lohkamp (cf. [50]). This is not exactly the approach adopted in [71], although many ingredients are in common (as well clarified in [69]). It is also appropriate to recall how the (Riemannian) positive mass theorem, which a priori is just a statement about an Hamiltonian invariant of asymptotically flat manifolds, was in turn crucial to fully resolve the Yamabe problem [68] by means of a striking blow-up argument which allowed to take care of the cases left pending by earlier work of Trudinger and Aubin (as it is explained in great detail in the comprehensive survey [46] by Lee and Parker).
From an historical perspective, it is appropriate to note how the first obstructions to the existence of positive scalar curvature metrics were discovered by Lichnerowicz in [48], by means of a suitable Weitzenböck-type identity involving the square of the Dirac operator hence ultimately relying on the aforementioned spin structures. The approach he pioneered was then further developed by many authors, including (among others) Hitchin and, as we already pointed out, Gromov–Lawson. From this perspective, Question 1.1 was for long time interpreted as a quest for a complete set of obstructions to the existence of positive scalar curvature metrics on closed manifolds. The minimal hypersurface approach came later, precisely in relation to the positive mass conjecture, and yet proved to be very effective in many respects.
We will survey the state of the art on Question 1.1 in the first part of Sect. 2. In very loose terms, this question has a complete, fully satisfactory answer when \(n=3\), has a complete, but somewhat ‘abstract’ answer for simply connected manifolds of dimension \(n\ge 5\) and is still not fully understood otherwise (in particular in the case \(n=4\)). As an incidental remark, this problem patently relates to that of characterizing the set of all functions that can be realised as scalar curvature functions on a given background manifold X. For the sake of brevity, we shall not include the discussion of this (important) matter in the present survey, and refer the reader to the classical work by Kazdan and Warner [34, 35] as well as to the corresponding discussion in [64].
In the cases when \({\mathcal {R}}\ne \emptyset \), Question 1.2 raises the bar to the hard task of understanding the deformation theory of positive scalar curvature metrics or, in other words, to get a deeper understanding about how flexible positive scalar curvature metrics actually are. Historically, if we set aside the \(n=2\) case (where the answer ultimately relies upon the uniformisation theorem), the first results that have been obtained were all on the negative side.
A well-known landmark, in this respect, was the pioneering work by Hitchin [32], employing harmonic spinors to the scope of proving that for any integer \(k\ge 1\) the space of positive scalar curvature metrics is disconnected on any sphere of dimension equal to 8k or \(8k+1\). We will provide a brief overview of these sorts of results in the second part of Sect. 2, to the scope of providing (abundant) supporting evidence for the statement that in many cases of interest the moduli space \({\mathcal {R}}/\mathcal {D}\) (hence \({\mathcal {R}}\)) consists of infinitely many connected components.
From there, we will turn to some much more recent developments, namely to the phase transition that occurs for manifolds of dimension three. In particular, we will describe how the Ricci flow [27] can be employed to prove positive results on the (higher-)homotopy groups of the space of positive scalar curvature metrics on closed 3-manifolds. Thus, we will focus on deep work by Marques [52] and on the striking recent results by Bamler and Kleiner [2] that stem from the generalised Smale conjecture (cf. [74]) on the diffeomorphisms group of closed 3-manifolds (cf. [30]).
Section 3 focuses instead on the study of compact manifold with boundary, namely the second class listed in Remark 1.3. We will first discuss how the two key questions above should be transposed to that setting. In particular, we will see how the pairing of conditions on the scalar curvature of a manifold, and the mean curvature of its boundary is the natural choice both from the perspective of Riemannian geometry and of general relativity, where these problems naturally arise in the study of (certain classes of) black hole solutions to the Einstein field equations. Once the questions are set up, we will briefly overview recent work by the author and Li [8] aimed at starting their systematic investigation. For instance, we give a complete topological characterization of those compact 3-manifolds that support Riemannian metrics of positive scalar curvature and mean-convex boundary and, in any such case, we prove that the associated moduli space of metrics is path-connected. We further explain how to refine our methods so to construct continuous paths of non-negative scalar curvature metrics with minimal boundary, and to obtain analogous conclusions in that context as well. Thereby, one can derive the path-connectedness of the space of asymptotically flat, scalar flat Riemannian 3-manifolds with minimal boundary (for any fixed background topology).
This is by no means the first survey about positive scalar curvature metrics, and certainly it does not aim to be a superset of the pre-existing ones. Besides the aforementioned article by Rosenberg and Stolz [64], we would definitely recommend the text of the ICM lecture by Schick [67] and the two parts of the recent, broad survey by Walsh [79, 80]. When compared to these works, the present survey places a lot less emphasis on the obstruction results, hence on the higher dimensional scenario, and much more on the three-dimensional theory as it has been recently developed. More generally, I believe many readers will witness quite a clear shift of perspective (partly reflecting, as it is obvious, the background of the author).
It is my hope that the combination of these, rather diverse, sources might provide an enlightening, broad-spectrum introduction to this fascinating subject, that still poses a number of outstanding open problems.
2 The case of closed manifolds
Throghout this section, we assume \(X^n\) to be a (smooth) compact manifold without boundary. For the sake of expository convenience, we will also restrict to the case that of orientable manifolds. Let us first provide a picture of the landscape in front of us as far as Question 1.1 is concerned.
The case \(n=2\) has been discussed above, so let us assume \(n \ge 3\). As a byproduct of Perelman’s monumental work [60,61,62] on the Poincaré (and geometrisation) conjectures, we have the following strikingly simple result describing the three-dimensional scenario.
Theorem 2.1
Let \(X^3\) be a connected, orientable, compact manifold without boundary, such that \(\mathcal {R}\ne \emptyset \). Then
where \(\#\) denotes a connected sum operation, and for each \(i=1,\ldots , p\), we have that \(S^3/\Gamma \) is a spherical space form (i.e. \(\Gamma _i\), \(i\le B\), are finite subgroups of SO(4) acting freely on \(S^3\)).
Viceversa, any such manifold supports Riemannian metrics of positive scalar curvature.
Recall that, given smooth connected manifolds \(X_1, X_2\) (both having dimension n) their connected sum, denoted by \(X_1\# X_2\), is obtained, roughly speaking, by removing small balls around two points, say \(x_1\in X_1, x_2\in X_2\) and joining them by means of a connecting neck of the form \(S^{n-1}\times I\) for \(I=[0,1]\subset {\mathbb {R}}\), as schematically shown in the following picture. One can prove that this operation, properly formalised, is well-defined, i.e. that its outcome does not depend on the choice of the basepoints (i.e. on the choice of \(x_1\in X_1\) and \(x_2\in X_2\)) and of the identification maps for the boundary spheres (cf. [38]) (Figs. 1, 2).
Remark 2.2
For the sake of comparison, Hamilton proved in [27] that a closed 3-manifold supporting metrics of positive Ricci curvature must be a spherical quotient. More generally, recall that the aforementioned Bonnet–Myers theorem implies at once that a manifold supporting metrics of positive Ricci curvature must be compact and have finite fundamental group. Both conclusions are false if one considers positive scalar curvature metrics instead, as shown e.g. by considering the Riemannian products \(S^p\times {\mathbb {R}}^q\) and \(S^2\times S^1\), respectively. In that respect, let G be any group that can be realised as the fundamental group of a (smooth) closed manifold, say \(X_0\). Then G can also be realised as the fundamental group of a manifold of positive scalar curvature, for it suffices to consider the product of \(X_0\) (endowed with any metric) with a suitably scaled two-dimensional round sphere.
We note that one of the two implications in Theorem 2.1 follows at once from a classical, yet fundamental fact about positive scalar curvature metrics:
Theorem 2.3
If two oriented manifolds \(X_1\) and \(X_2\) support positive scalar curvature metrics, then so does their connected sum \(X_1\# X_2\).
The proof of this result has been presented, independently, by Gromov–Lawson in [24] and Schoen–Yau in [72]. The argument in [24] has a rather constructive character: given \(g_1\) (respectively \(g_2\)) a positive scalar curvature on \(X_1\) (respectively \(X_2\)), one can build a metric g on \(X_1\# X_2\) that coincides with \(g_1\) away from a small geodesic ball on \(X_1\), with \(g_2\) away from a small geodesic ball on \(X_2\), resembles a cylindrical (product) metric near the center of \(S^2\times I\) and (most importantly) has positive scalar curvature everywhere. The construction is thus local around two given points on the manifolds that serve as input.
Now, as far as the application above is concerned, it is clear that both \(S^3/\Gamma \) and \(S^2\times S^1\) support positive scalar curvature metrics (for instance: the round, and product ones) hence the conclusion comes straight by invoking Theorem 2.3.

The connected sum operation, for three-dimensional manifolds
It is also important to mention how this statement about realising connected sums with positive scalar curvature metrics is actually just a special instance of a more general principle:
Theorem 2.4
Let X be an oriented manifold supporting positive scalar curvature metrics. Then the same conclusion holds for any manifold \(X'\) that is obtained from X performing a surgery of codimension at least 3.
Without embarking on a detailed discussion of surgery operations, which again entails various non-trivial aspects, let us give an informal idea of what we mean. We observe that for any \(p\ge 0, q\ge 1\) one has
for \(\partial \) the standard boundary operator. Hence, we shall say that \(X'\) descends from X by means of a surgery of dimension p (or codimension q) if it is obtained by removing an embedded \(S^p\times D^q\) and replacing it with \(D^{p+1}\times S^{q-1}\), glued along the common boundary. Here \(n=p+q\), if n denotes the dimension of X; the connected sum operation formally corresponds to \(p=0\).
Let us then proceed to the discussion of Question 1.1 for higher-dimensional manifolds. Partly building on Theorem 2.4 it is possible to prove if X is a closed, simply connected manifold of dimension at least 5, and if \(w_2(X)\ne 0\) then X does support positive scalar curvature metrics. Here \(w_2(X)\in H^2(X;\mathbb {Z}/2\mathbb {Z})\) denotes the second Stiefel-Whitney class of the tangent bundle of X. This result leaves the case \(w_2(X)= 0\) open, which is indeed the case corresponding to spin manifolds (i.e. manifolds admitting a spin structure). The situation was then fully clarified by the following, outstanding theorem by Stolz [75].
Theorem 2.5
Let \(X^n\) be a closed, simply connected manifold of dimension \(n\ge 5\). Then: \(\mathcal {R}\ne \emptyset \) if and only if either X does not admit any spin structure or admits a spin structure such that the (associated) \(\alpha \)-invariant vanishes.
Remark 2.6
For the basic background on the map \(\alpha \), which is a graded ring homomorphism from the set of spin cobordism classes to the real K-homology of a point, we refer the reader to the beautiful monograph by Lawson and Michelsohn [43].
Remark 2.7
When one considers closed (oriented) manifolds that are not simply connected, the characterization given by Theorem 2.5 ceases to hold: for instance, as we saw with Theorem 1.7, the three-dimensional torus \(T^3\) supports no positive scalar curvature metric, in spite of being a spin manifold with vanishing \(\alpha \)-invariant.
Remark 2.8
For \(n=2,3\) all closed simply connected manifolds do admit positive scalar curvature metrics. For \(n=4\), there are lots of simply connected manifolds that do not admit positive scalar curvature metrics. In fact, this is the case for any K3 surface (cf. [44, 45]).
It turns out that the issues raised in the two remarks above are not at all isolated, for in fact we still do not have a clear/complete understanding of the situation when the fundamental group is not trivial (cf. [4, 66]) or when \(n=4\).
On the one hand, let us remind the reader that the key contribution in [75] was to prove that a spin manifold with vanishing \(\alpha \)-invariant does admit a metric of positive scalar curvature: as was pointed out to us by Hanke, for non simply connected manifolds (in dimension \(\ge 5\)) we have almost no general existence results for positive scalar curvature metrics, except for very specific fundamental groups. Some information in the case of odd order abelian fundamental groups may be found in [28].
On the other hand, the world of four-dimensional manifold seems to be peculiar with respect to Question 1.1 as well. Its investigation is naturally connected to Seiberg-Witten theory, see [76] by Taubes and [65] by Ruberman (as well as references therein). In that respect, we wish to mention the existence of simply connected spin manifolds that have vanishing \(\alpha \)-invariant and yet do not admit any positive scalar curvature metric. This ultimately relies on a striking theorem by Teicher [77, Theorem 5.8] constructing simply connected general-type complex surfaces which are spin and have signature zero (cf. [56]), for indeed employing the Seiberg-Witten invariants one proves that all compact algebraic surfaces of ‘general type’ do not admit metrics of positive scalar curvature [57].
Let us now turn our attention to Question 1.2. The network of problems around this question has been extensively studied for decades, yet the landscape in front of us is still very poorly understood, except in special cases. One such case corresponds to the scenario when the background manifold X is a closed (orientable) surface \(X^2\). Like we wrote in the introduction, in this case the space \(\mathcal {R}\) of positive scalar curvature metrics, when not empty (which occurs if and only if \(X^2\) is a sphere), is contractible. Actually, this conclusion follows from a more general statement, proven by the author in joint work [10] with Wu. To present it, we will employ this notation. Given a Riemannian metric g we denote by [g] the pointwise conformal class of g, that is, \(g_1 \in [g]\) if \(g_1 = e^{2u} g\) for some smooth function u on X. Further, let \(\mathcal {C}\) denote the set of conformal classes of metrics on X, and \(\pi \) the associated projection map.
Theorem 2.9
Let \(\mathcal {S}\) be a non-empty space of Riemannian metrics satisfying the following two properties:
-
(1)
one fiber is star-shaped, namely: there exists a metric \(\bar{g} \in \mathcal {S}\) such that
$$\begin{aligned} e^{2tu} \bar{g} \in \mathcal {S} \cap \pi ^{-1}([\overline{g}]) \ \text {for all} \ 0 \le t \le 1, \ \text {whenever} \ e^{2u} \bar{g} \in \mathcal {S} \cap \pi ^{-1}([\bar{g}]); \end{aligned}$$ -
(2)
\(\mathcal {S}\) is invariant under diffeomorphisms, i.e.
$$\begin{aligned} g\in \mathcal {S} \ \text {if and only if} \ \phi ^{*}g\in \mathcal {S} \ \text {for all} \ \phi \in \mathcal {D}. \end{aligned}$$
Then \(\mathcal {S}\) is contractible.
Although [10] deals with compact surfaces with boundary, hence with the (somewhat more general) problems we will present in Sect. 3, the translation to the closed setting is straightforward. Theorem 2.9 implies the contractibility of \(\mathcal {R}\) because all fibers of \(\mathcal {R}\) are actually convex in the sense that if \(g_i = e^{2u_i} g \in \mathcal {S} \cap \pi ^{-1} ([g])\), \(i = 1, 2\), then
due to the well-known equation describing the change of Gauss curvature under pointwise conformal deformations, that reads
Sketch of proof of Theorem 2.9
We first note that an elementary argument, based on the use of volume forms, implies that the set \(\mathcal {C}\) is contractible, see e.g. [10, Appendix A]. This fact holds true for any n-dimensional oriented manifold, without specific reference to the setting in question.
Hence the theorem is proven by showing that the set \(\mathcal {S}\) in the statement is homotopy equivalent to \(\mathcal {C}\), which in turn is done by constructing a section of \(\mathcal {S}\) over \(\mathcal {C}\). One way of proving the uniformisation theorem relies on the Beltrami equation, and that approach provides (as a byproduct) a homeomorphism \(\Phi : \mathcal {C}\rightarrow \mathcal {D}^{+}_{\bullet }\), the space of orientation-preserving diffeomorphisms of the sphere that fix three given marked points. That said, one defines the map \(\sigma : \mathcal {C} \rightarrow \mathcal {S}\) by factoring through \(\mathcal {D}^{+}_{\bullet }\) as shown in the diagram

namely one sets
This definition is well-posed because of assumption (2) in the statement. That being said, one checks at once that \(\pi \circ \sigma = \mathbb {1}_{\mathcal {C}}\), the identity on the set of conformal classes, while on the other hand (exploiting assumption (1) in the statement) \(\sigma \circ \pi \simeq \mathbb {1}_{\mathcal {S}}\), where \(\simeq \) stands for the homotopy relation. Hence, \(\mathcal {S}\) is homotopy equivalent to \(\mathcal {C}\). \(\square \)
In spite of its simplicity, the case of surfaces is quite instructive, as it exhibits some features that are much harder to detect in the higher-dimensional scenario. In particular, a trivial (but non secondary) remark is that the conclusion that \(\mathcal {R}\) be contractible does not, in general, imply that the associated moduli space \(\mathcal {R}/\mathcal {D}\) be contractible as well (nor, of course, the converse is true). For instance, in the setting above one can easily prove that the moduli space in question is homeomorphic to the space obtained by quotienting the set \(\left\{ u\in C^{\infty }(S^2) \ : \ 2-\Delta _{g_0} u>0 \right\} \) (for \(g_0\) the standard round metric) with respect to the right action of \(PSL_2(\mathbb {C})\). Namely, the equivalence relation is defined as
where \(f_{\eta }\) is uniquely determined by the equation \(\eta ^{*}g_0=e^{f_{\eta }}g_0\).
So, the reader might get convinced (at least at some heuristic level) that the full understanding of \(\mathcal {R}\) does not per sé trivialise, in any sense, the problem of determining the homotopy type of the associated moduli space.
As anticipated above, the case \(n=3\) is very peculiar. Till about a decade ago, essentially no general result about \(\mathcal {R}\) or \(\mathcal {R}/\mathcal {D}\) was available. This ceased to be the case when Marques showed in [52] how to employ Perelman’s work on the Ricci flow with surgery, together with a number of other tools, to prove the following statement.
Theorem 2.10
Let \(X^3\) be a connected, orientable, compact manifold without boundary. Then: either the space of positive scalar curvature metrics \({\mathcal {R}}\) is empty, or the moduli space \({\mathcal {R}}/\mathcal {D}\) is path-connected. In addition, when \(X^3\) is diffeomorphic to the three-dimensional sphere \(S^3\) then the space \({\mathcal {R}}\) is itself path-connected.
Remark 2.11
When \(X^3=S^3\), then we know by [12] that \({\text {Diff}}^+(S^3)\) is contractible. Thanks to this fact, together with the path-connectedness of the moduli space, the conclusion for \({\mathcal {R}}\) is straightforward. In fact, we now know a lot more about \({\text {Diff}}(S^3)\): by work of Hatcher [30] this space is actually homotopy equivalent to O(4). The attempt of suitably generalising this sort of conclusion to all closed 3-manifolds (i.e. to prove the generalised Smale conjecture) was a driving force for recent research in geometric analysis, on which we will come back later when briefly discussing the contributions by Bamler and Kleiner.
The proof presented by Marques contains several beautiful ideas and cannot be reasonably presented here in any detail. We will just limit ourselves to sketch it, with a focus on some specific aspect that will get back in play in Sect. 3.
Given a closed orientable 3-manifold X that supports positive scalar curvature metrics we know from Theorem 2.1 that it takes the form of a connected sum of finitely many pieces that are either spherical space forms or handles. Hence, for any such manifold Marques defined a preferred, path-connected subset \(\mathcal {O}\subset \mathcal {R}\) consisting of model metrics. In the simplest case of \(S^3\) one has that \(\mathcal {O}/\mathcal {D}\) only consists of one point (the equivalence class of the round metric), while in general model metrics are obtained by attaching to a central round sphere the other summands by means of Gromov–Lawson connected sum operations. That said, one needs to develop a strategy to connect, by means of continuous paths of smooth metrics, an arbitrary initial point in \(g_0\in \mathcal {R}\) to an element in \(g\in \mathcal {O}\).

Connecting arbitrary initial metrics in \(\mathcal {R}\) with model metrics, in the case when \(X\cong S^3\) so that \(\mathcal {O}/\mathcal {D}\) is the equivalence class of the round metric
To construct these paths, one would like to employ Hamilton’s Ricci flow. In order to clarify the point, let us observe how one could prove that the space of metrics on \(S^3\) of positive Ricci curvature is path-connected. We follow the same conceptual scheme as above. Hence, given \(g_0\), a metric of positive Ricci curvature, as initial datum for the evolution we know (by the main theorem in [27]) that the renormalised flow will converge to a round metric. Hence, if we look at the evolution in the quotient modulo the action of diffeomorphisms, we prove that any initial equivalence class can be joined to that associated to the standard round metric, which then implies the path-connectedness result we want.
The problem here is that under our assumptions, namely that \(g_0\in \mathcal {R}\), the (renormalised) flow will not in general converge to a round metric, but will indeed develop finite time singularities so that suitable operations, again called surgeries (but totally unrelated to the construction which lies behind the statement of Theorem 2.4), are needed to continue the flow. More precisely, we take \(g_0\in \mathcal {R}\) as input and look at the spacetime plot of the Ricci flow with surgery (as defined by Perelman) as output. Due to the positive scalar curvature assumption, there will be a finite extinction time \(t_{j+1}>0\) as well as, possibly, finitely many intermediate singular times \(t_1,\ldots t_j\) (with \(0<t_1<\cdots<t_j<t_{j+1}\)) where surgeries occur. Using the blow-up analysis by Perelman (i.e. his classification of singularities), Marques proved that the (possibly disconnected) Riemannian manifold one has short before time \(t_{\ell }\) is isotopic to a Gromov–Lawson connected sum of the pieces one sees at time \(t_{\ell }\). Hence, the conclusion comes by means of a backward-in-time induction argument provided one proves the following two assertions:
-
(a)
the Gromov–Lawson connected sum of Riemannian manifolds that can be separately isotoped to model metrics is itself isotopic to a model metric, and
-
(b)
short before the extinction time \(t_{j+1}\) the Riemannian manifold one sees is isotopic to a model metric.
Each of these two statement is, in turn, quite non-trivial to prove. The former relies, among other tools, on the use of Kuiper’s developing map (cf. [40, 41]), a reference toy problem being that of proving that the Gromov–Lawson connected sum of two round spheres is conformally diffeomorphic to a round sphere. The latter exploits, instead, Perelman’s fundamental result asserting that, short before the singular time, the Riemannian manifold we see satisfies the so-called \((C,\epsilon )\)-canonical neighborhood property, i.e. it is covered by geometric pieces we understand well (essentially: caps and necks with suitable curvature bounds). A highly non-trivial covering argument is employed to close the proof of this second ancillary statement.
To say something more about Question 1.2 for three-dimensional manifolds, we need to get back to the generalised Smale conjecture, i.e. to the conjecture that for all closed, irreducible, geometric manifolds there exists a homotopy equivalence between the space \(\mathcal {D}\) of diffeomorphisms and the space of isometries associated to a homogeneous Riemannian metric of maximal symmetry. Without opening an additional digression on this problem, we shall mention here how the conjecture has been recently proven by Bamler–Kleiner [2]. The key tool, in their approach, is the result (motivated by well-known statements due to Perelman) that there is a unique, canonical singular Ricci flow, and that the associated Ricci flow spacetimes depend continuously/smoothly (in a suitable sense) on their initial data. In this approach, the problem of suitably defining and constructing surgeries is somewhat by-passed by means of a more robust approach, where the flow is not necessarily regarded in purely classical, smooth terms. As a vague analogy, the reader may wish to compare this sort of result to the construction of weak mean curvature flows as level set flows, as originally proposed by Evans and Spruck in [18] and, indiependently, by Chen, Giga and Goto in [13]. In any event, using this methodology (crucially relying on earlier work by Kleiner and Lott [37], whose program was then completed in [3]), Bamler and Kleiner succeeded in proving the following remarkable result:
Theorem 2.12
Let \(X^3\) be a connected, orientable, compact manifold without boundary. Then the space of positive scalar curvature metrics \({\mathcal {R}}\) is either empty or contractible.
This provides a complete understanding of the space \({\mathcal {R}}\) for closed manifolds of dimension three, so let us now focus on the case \(n>3\). In analogy with what we described above for Question 1.1, the results that have been obtained mostly rely on the index theoretic analysis of Dirac operators (or generalisations thereof) or, in the special case of four-manifolds, on gauge-theoretic tools. To make a long story short, and oversimplifying things to the extreme, we can assert that
‘if the background manifold has dimension \(n\ge 4\) the moduli space \(\mathcal {R}/\mathcal {D}\) has, in many cases of interest, infinitely many connected components.’
In particular, in any of these cases, the same conclusion holds for \({\mathcal {R}}\) as well. That being said, following the chronological order of the events, a very brief overview of some landmark results goes as follows. Concerning the space \({\mathcal {R}}\) of positive scalar curvature metrics on \(S^n\):
-
in 1974, Hitchin proved in [32] that it is disconnected when \(n\equiv 0,1 \ (\text {mod} \ 8)\);
-
in 1983, Gromov–Lawson proved in [26] that it has infinitely many connected components when \(n=7\);
-
in 1988, Carr proved in [11] that it has infinitely many connected components when \(n\equiv -1 \ (\text {mod} \ 4), \ n\ge 7\).
Further refining the last of the results mentioned above, Kreck and Stolz proved in [39] that the moduli space \({\mathcal {R}}/\mathcal {D}\) of \(S^{n}\) also has infinite connected components for \(n\equiv -1 \ (\text {mod} \ 4), \ n\ge 7\).
In addition, Botvinnik and Gilkey discussed in [6] how to construct examples of closed, orientable manifolds of any pre-assigned dimension \(n\ge 5\) for which, again, the moduli space in question has infinitely many connected components. This result has recently been improved by Reiser in [63]. Lastly, for what concerns the case \(n=4\), in [65] Ruberman constructed, on the one hand, examples of closed orientable manifolds for which \({\mathcal {R}}\) has infinitely many connected components and, on the other, examples of closed non-orientable manifolds for which the moduli space has itself infinitely many components.
Remark 2.13
To the best of our knowledge, it is still unclear whether for any \(n\ge 4\) it is possible to construct simply connected manifolds such that \({\mathcal {R}}\) has infinitely many connected components.
The results we have listed above do not, by any means, provide a complete overview of the recent advances in the field. In particular, we have witnessed some partial, yet striking, progress on the problem of determining the higher homotopy groups of \(\mathcal {R}\). In that respect, we refer the reader to [7, 29, 82] and references therein.
3 The case of compact manifolds with boundary
Let us now transition to the case when \(X^n\) is a compact manifold with boundary. What can one say about Questions 1.1 and 1.2? It turns out that, quite surprisingly, both questions are trivialised by the following theorem, due to Gromov [22, Theorem 4.5.1].
Theorem 3.1
Let \(X^n\) be a compact manifold with \(n\ge 3\). If \(\partial X\not =\emptyset \), then \(X^n\) always supports positive scalar curvature metrics, i.e. \({\mathcal {R}}\not =\emptyset \). In fact, \(X^n\) always supports metrics with positive sectional curvature.
So, as it is also plausible from a PDE perspective, we must add ‘boundary conditions’ for the questions above to be of some interest. Of course, a priori this leaves room for different choices. Motivated by later applications to the study of initial data sets for (certain classes of) asymptotically flat, black hole solutions to the Einstein equations, we will focus here on pointwise conditions on the mean curvature of \(\partial X\). To elaborate on this, let us quickly recall a few basic facts about the mathematical foundations of general relativity. Let us consider a Lorentzian manifold \((L,\gamma )\), of dimension \(1+3\), and assume it solves the Einstein field equations
where \(G_\gamma :={{\,\mathrm{Ric}\,}}_\gamma - \frac{1}{2} R_\gamma \gamma \) (we assume, for the sake of simplicity, to work with a vanishing, or anyway negligible, cosmological constant), and T is the stress-energy tensor which describes the physical sources. Now, let X be a spacelike hypersurface inside L, and let g and h denote its first and second fundamental forms, respectively. A straightforward computation shows that the Gauss and Codazzi equations, combined with (3.1), imply that (X, g, h) shall satisfy the system
for \(\mu \) the energy density and J the momentum densisty associated to T. These equations, known as Einstein constraints, turn out to be a necessary and sufficient condition for a triple (X, g, h) to isometrically embed in a spacetime solving the field equations. For indeed, a celebrated theorem due to Choquet-Bruhat (see [14], as well as later work with Geroch [15]) ensures that any such triple constitues an initial data set for a well-posed hyperbolic problem (as are the Einstein field equations, when written in a suitable gauge).
Now, in the simplest of all cases, namely when \(h=0\) (the so-called Riemannian case) it is readily seen that the constraints reduce to a single condition on the scalar curvature. In particular, when the sources are assumed (as it is most often the case) to satisfy the dominant energy condition \(\mu \ge |J|_g\) we would be looking for metrics of positive (in fact: non-negative) scalar curvature on X. Analogous remarks hold true, more generally, in the so-called maximal case, i.e. when \({{\,\mathrm{tr}\,}}_g h=0\). This is a crucial conceptual link, which lies behind the reduction of the positive mass conjecture to Question 1.1 for a certain class of closed manifolds, as we remarked in the introduction.
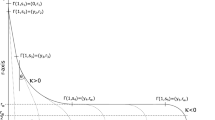
That being said, in many situations of physical relevance the solutions one deals with exhibit an event horizon, which bounds a black hole region, from where physical signals cannot escape. This is for instance the case with the familiar Schwarzschild spacetime, whose Penrose diagram is sketched in Fig. 3. If \((L,\gamma )\) is a black hole solution of the Einstein equations, the trace of the event horizon on a spacelike hypersurface inherits an additional condition, on the (null) mean curvature, which can equivalently be posed as a possibly inhomogeneous condition on the Riemannian mean curvature of \(\partial X\) within (X, g). Then, once again, through suitable compactification arguments, we can derive results for black hole spacetimes from theorems concerning compact 3-manifolds with boundary (with a Riemannian metric).

A sketchy Penrose diagram for the Schwarzschild black hole solution
Therefore, given \(X^n\) a compact orientable manifold and g a smooth Riemannian metric on X, and denoted by
the general theme we wish to develop in this section is the study of sets of Riemannian metrics on X that are ‘cut’ by two pointwise conditions involving these two curvature functions. For example, one can consider
To streamline the exposition we will mostly focus on the case of \(\mathcal {M}\), although one may develop a similar program for \(\mathcal {H}\), on which we will get back later on. We can then ask similar questions as in the closed case, namely:
-
(a)
Given X as above, can we decide whether \(\mathcal {M}\ne \emptyset \)?
-
(b)
What is the homotopy type of the moduli space \(\mathcal {M}/\mathcal {D}\)?
Note that, in this case \(\mathcal {D}\) shall denote the space of (proper) diffeomorphisms of X, without the assumption that they restrict to the identity along the boundary \(\partial X\).
Remark 3.2
There are obviously other ways of recasting Questions 1.1 and 1.2. An interesting choice, that turns out to be quite natural from the topologists’ perspective is to impose collar boundary conditions, i.e. study positive scalar curvature metrics that take the form of a product near the boundary. We will not further describe this problem here, but rather refer the reader to [5, 78] as well as references therein (in particular: classical work by Gajer [19]) for various contributions around this theme.
To get a feeling for these questions, and to better convince ourselves of the close analogy with the corresponding questions in the closed case, let us first consider compact surfaces with boundary. In this case, the Gauss–Bonnet theorem implies that, if \(\mathcal {M}\not =\emptyset \), then \(\chi (X)>0\) and thus X must be diffeomorphic to a two-dimensional disc \(D^2\). Furthermore, thanks to the uniformisation theorem, it can be shown that \({\mathcal {M}}\) is contractible. In fact, in [10] we proved Theorem 2.9 for surfaces with boundary (which, in particular, allows to deduce the contractibility of both \(\mathcal {M}\) and \(\mathcal {H}\)).
Very little is known, for the two questions above, when \(n\ge 4\). We shall instead focus on three-dimensional manifolds, and briefly present some of the main results in [8].
Theorem 3.3
([8, Theorem 1.1]) Let \(X^3\) be a connected, orientable, compact manifold with boundary, such that \(\mathcal {M}\ne \emptyset \). Then there exist three integers \(A,B,C\ge 0\), not all zero, such that X is diffeomorphic to a connected sum of the form
Here: \(P_{\gamma _i}\), \(i\le A\), are genus \(\gamma _i\) handlebodies; \(\Gamma _i\), \(i\le B\), are finite subgroups of SO(4) acting freely on \(S^3\). Viceversa, any such manifold supports Riemannian metrics of positive scalar curvature and mean-convex boundary.
In the statement, as above, the symbol \(\#\) denotes an interior connected sum. Also, note that we allow \(\gamma =0\) (i.e. genus zero handlebodies) and that taking the interior connected sum with a copy of \(P_0\) is equivalent to removing an open ball away from the boundary. Before sketching the proof of Theorem 3.3, let us mention some related results. In particular, it is natural to ask how the answer to our questions changes replacing the strict inequalities in the definition of \({\mathcal {M}}\) with weak inequalities. The answer is given by the following statement.
Theorem 3.4
Let \(X^3\) be a connected, orientable, compact manifold with boundary. Then the following three assertions are equivalent:
-
(i)
\(\mathcal {M}_{R>0, H>0}\ne \emptyset \);
-
(ii)
\(\mathcal {M}_{R>0, H\ge 0}\ne \emptyset \);
-
(iii)
\(\mathcal {M}_{R\ge 0, H>0}\ne \emptyset \).
Furthermore, each of these is equivalent to
-
(iv)
\(\mathcal {M}_{R\ge 0, H\ge 0}\ne \emptyset \),
unless \(X^3\cong S^1\times S^1\times I\) (in which case the space \(\mathcal {M}_{R\ge 0, H\ge 0}\) only contains flat metrics, making the boundary totally geodesic).
The proof of this result, which we will not present here, exhibits various connections with the torus rigidity theorem (cf. Theorem 1.7) and the positive mass theorem. Instead, we shall now give an outline of the proof of Theorem 3.3. In particular we first prove that all manifolds as in the statement support a metric in \({\mathcal {M}}\) and then we prove that all manifolds for which \({\mathcal {M}}\not =\emptyset \) are of that form.
Proof of Theorem 3.3
Let us first deal with the second assertion. Thanks to Theorem 2.1, since the statement of Theorem 3.3 only involves connected sums in the interior (thus not affecting the boundary), it suffices to show that for any \(\gamma \ge 0\) the handlebody \(P_\gamma \) can be endowed with a metric of positive scalar curvature and mean-convex boundary. One way to see this is to notice that for any \(\gamma \ge 0\) there exists, in round \(S^3\), a minimal surface of genus \(\gamma \) (thanks to classical work by Lawson [42]): any such surface is two-sided and unstable, thus if we consider a small deformation by means of the first eigenfunction of the Jacobi operator we will determine two domains, one of which is mean-convex and has scalar curvature equal to 6 at all points.
Let us now discuss the other implication, which is a lot subtler. The key trick to attack it is an old, but perhaps not so well-known remark by Gromov–Lawson [25, Lemma 5.7], asserting that if X satisfies \(\mathcal {M}\ne \emptyset \) then its double DX satisfies \(\mathcal {R}\ne \emptyset \). In other words, whenever \(X^3\) supports metrics of positive scalar curvature and mean-convex boundary, we can endow its (topological) double DX with a metric of positive scalar curvature. We will get back later to the proof of this statement (which does indeed play a fundamental role in the global economy of [8]) but, for the time being, let us give it for granted and see how to proceed.
Thanks to such a remark, it is enough to classify the compact orientable three-manifolds X with boundary such that
which is a purely topological matter. To take care of this, we proceed in two steps.
Step 1 Assume that there are only spherical boundary components. In this case we compare the outcome of two topological operations we can perform on X: the first one is the double D and the second one is the filling F. Rather than formally defining these operations (which are quite intuitive anyway), we depict them by means of the following picture (Figs. 4, 5, 6).

For a compact manifold with boundary X, we compare DX versus FX
What is always true, and rather easy to check, is that these two operations are related by the following equation
where d is the number of boundary components of X. Keeping in mind that the left-hand side of this equation is given (it is provided by Theorem 2.1), we solve this equation for FX (using Milnor’s uniqueness theorem of prime decomposition of three-manifolds [55]) and get, for suitable integers \(p', q'\)
At that stage, we solve for X by simply removing finitely many balls in the interior, namely we obtain
which is what we wanted, provided we just keep in mind that any ball removed corresponds to the connected sum with a solid disc, which we denote \(P_0\) (a genus zero handlebody).
Step 2 In the general case, namely when one needs to handle boundary components of positive genus, the key remark is that any such boundary component must be compressible in X. This is a standard notion in geometric topology, for which we refer the reader e.g. to the monograph by Jaco [33]. In our specific setting, where any surface we deal with is two-sided and orientable (being a connected component of the boundary \(\partial X\)) this condition is equivalent to the non-injectivity of the fundamental group of the surface in the fundamental group of X (the morphism being the map induced by the inclusion). The reason why such claim is true is quite simple: if that were not the case, we could construct in X a stable minimal surface of positive genus, which is impossible by well-known facts about the second variation of the area functional (as we have seen above in sketching the proof of Theorem 1.7).
That being said, any such boundary component comes with a compressing disc and we can compress along that disc obtaining a new compact 3-manifold with boundary, say Z, such that \(DX\cong DZ\# (S^2\times S^1)\). At this stage, either Z only has spherical boundary components (in which case we invoke Step 1 or, if not, it has other non-spherical boundary components. In the latter alternative, we perform yet another compression. Because of the previous equation relating DX and DZ, the process must finish after finitely many steps, hence we eventually reduce to a compact manifold with boundary, say \(Z_0\), to which Step 1 applies. At that stage, we can determine \(Z_0\) and, hence, reconstruct X by arguing backwards, i.e. by unwinding the compression operations we have just performed. In particular, we note that X is obtained by taking finitely many boundary connected sums of \(Z_0\) with \(D^2\times [0,1]\). For any \(\gamma \ge 1\), the boundary connected sum
is diffeomorphic to a genus \(\gamma \) handlebody. Thereby, reconstructing X from \(Z_0\) we can conclude the proof of Theorem 3.3. \(\square \)
Once these aspects have been clarified, we can proceed and start looking at the structure of the space \(\mathcal {M}\), in those cases when it is not empty. In particular, we can determine \(\pi _0({\mathcal {M}})\).
Theorem 3.5
([8, Theorem 1.2]) If \({\mathcal {M}}\not =\emptyset \), then \({\mathcal {M}}/\mathcal {D}\) is path-connected. In the special case \(X^3\cong D^3\), then \({\mathcal {M}}\) is path-connected.
Remark 3.6
Here are some general comments about this statement.
-
This conclusion is not known for any \(n\ge 4\), not even for \(D^n\), but (relying on the analogy with the closed case) it is reasonably expected to be false in many cases of interest.
-
The same conclusion as in Theorem 3.5 also holds for the three larger spaces \({\mathcal {M}}_{R\ge 0, H>0}\), \({\mathcal {M}}_{R\ge 0, H\ge 0}\) and \({\mathcal {M}}_{R>0, H\ge 0}\) thanks to Theorem 3.4 and related, simple deformation arguments, unless \(X^3\cong S^1\times S^1\times I\) (in which case the conclusion is still true, due to the characterization of the metrics in \({\mathcal {M}}_{R\ge 0, H\ge 0}\)).
-
The proof of Theorem 3.5 is a combination of elliptic and parabolic methods. In addition, although the statement concerns smooth metrics, the methods we employ are partly non-smooth (i.e. along the course of our arguments we need to deal with metrics that exhibits certain types of singularities along codimension one interfaces).

A diagram showing the inclusions of the four spaces of metrics defined in terms of scalar curvature and boundary mean curvature
Essentially, this theorem is proven through two main steps, that are hereby briefly outlined. The first one is essentially an ‘isotopic version’ of the Gromov–Lawson doubling construction. That is to say, given \(g\in {\mathcal {M}}= {\mathcal {M}}_{R>0,H>0}\), we build an isotopy \((g_\mu )_{\mu \in [0,1]}\) starting at \(g_0=g\), such that \(g_\mu \in {\mathcal {M}}\) for all \(\mu \in [0,1)\) and that \(g_1\) has positive scalar curvature and totally geodesic boundary (in fact, it can be smoothly doubled).

The first step: reducing the problem to a question about closed manifolds with a certain symmetry (which we call reflexive triples)
This isotopy being constructed, the idea for the second step is that we can then flow the metric on the closed manifold obtained as the double of X with metric \(g_1\), so to connect it to a subset of model metrics, to be suitably defined in this context. But before moving on, let us now outline the idea of the proof behind this isotopic doubling construction.
As it is shown in the picture below, in the Gromov–Lawson doubling construction one considers the set \(T_\epsilon =\left\{ (x,h)\in X\times {\mathbb {R}}: d((x,h),X')=\epsilon \right\} \) consisting of the points in space \(X\times {\mathbb {R}}\), with its product metric, at tiny distance \(\epsilon \) from a small inward deformation \(X'\) of X. It is apparent that the set \(T_{\epsilon }\) shall consist, roughly speaking, of two isometric copies of \(X'\) and the portion of a tube (corresponding to the set of points at distance \(\epsilon \) from \(\partial X'\times \left\{ 0\right\} \) in \(X\times {\mathbb {R}}\). Such a tube consists of meridians parametrised by an angle \(\theta \in [-\pi /2,\pi /2]\). The values \(\theta =\pm \pi /2\) correspond to the singular interfaces, where the induced metric is not smooth.
In [25] it is observed that if \(g\in \mathcal {M}\) then the induced metric on \(T_{\epsilon }\) has, away from such interfaces, positive scalar curvature. Such interfaces can be smoothened by different methods, see e.g. [54] or [53], and in both cases the smoothing can be performed so that the resulting metric on DX still has positive scalar curvature. What we discovered in [8] is that an additional, somewhat suprising, property holds true: for any value of \(\theta _0\in (0,\pi /2)\) the mean curvature of the manifold with boundary defined by the inequality \(\theta \ge \theta _0\) (a set drawn in Fig. 7 in magenta) is strictly positive, which naturally defines a family of (singular) metrics on X all having positive scalar curvature and mean-convex boundary. Hence, the point is to suitably desingularise these metrics, so to gain a continuous path of smooth metrics. What we do in [8] is first to regularise by means of a localised fiberwise convolution, which produces a new family of metrics that may fail to have positive scalar curvature in a small strip around the interface, and then ‘reimpose the constraints’ i.e. conformally deform these metrics using the first eigenfunction of the conformal Laplace operator with Neumann boundary conditions. Using results by Mantoulidis–Schoen [51] on the smooth dependence of (suitably normalised) eigenfunctions with respect to the background metrics, combined with a variation of an argument by Li-Mantoulidis [47] providing a uniform, positive lower bound for the first eigenvalue of that operator (which in turn relies on the application of Moser’s Harnack inequality) we can finally obtain the desired isotopy.

A cartoon picture for the Gromov–Lawson doubling trick, and our isotopic counterpart
The net outcome of this construction is thus the reduction of our problem into one concerning the space of positive scalar curvature metrics satisfying a suitable equivariance constraint. More specifically, we define a category of reflexive n-manifolds, that are (loosely speaking) triples \((M^3,g,f)\) where \((M^3,g)\) is a closed Riemannian manifold and \(f\in C^\infty (M,M)\) is an isometric involution \(f^2 = id\), \(f\not =-id\) that is conjugate to a ‘standard reflection’. However, note that if M is non-connected, there may be reflexive pairs as well (couples of identical connected components). That being said, what we still need to do in order to prove Theorem 3.5 is to show that any reflexive triple of positive scalar curvature can be joined, through a reflexive isotopy of classes of \({\mathcal {R}}\) to a model triple.

The backward inductive scheme
Because of the statement of Theorem 3.3, the definition of model triples takes quite some effort when compared to the closed case, i.e. to [52]. First of all, we need to get a classification for suitably equivariant necks, and then we need to devise a general procedure to assign to each X a collection of equivariant necks, of the different types, (together with, possibly, some spherical space forms) in a way that the inductive scheme behind the proof of Theorem 2.10 might work as well. In that respect, it may be appropriate to note, for instance, how the doubling map \(X\mapsto DX\) is (highly) non-injective: for instance \(S^2\times S^1\) can be obtained by doubling either \(S^2\times I\) or \(D^2\times S^1\) (and in the two cases the corresponding model metrics will be very different).
That being said, we evolve an initial reflexive triple through a suitable equivariant Ricci flow with surgery, due to Dinkelback–Leeb [16]. Hence, we follow the conceptual path that has been described in Sect. 2, which we depict in the Fig. 8. All technical tools need to be transplanted to this (special) equivariant setting, and in particular a key point to make the backward induction work is to show that the equivariant connected sum of reflexive triples that can be (separately) isotoped to model triples can be isotoped, within reflexive triples, to a model triple as well.
Here are a couple of final remarks about the contributions in [8]. First of all, we can obtain similar results for spaces of metrics of positive (or: non-negative) scalar curvature and minimal boundary such as e.g. the space \(\mathcal {H}\) defined above (cf. [8, Sect. 6]). This requires some extra care, and indeed there are subtle technical points coming into play, but the general argument resembles the approach we have described in this section. From there, fairly standard compactification arguments allow to deduce path-connectedness results for spaces of asymptotically flat metrics on, say, \({\mathbb {R}}^3\) minus a finite number of balls with non-negative scalar curvature and minimal or mean-convex boundary conditions. This has quite non-trivial implications. For instance, when the background topology is that of \({\mathbb {R}}^3{\setminus } B\) this result implies that we can connect any given asymptotically flat solution of the (Riemannian) vacuum Einstein constraint equations, through a continuous path of solutions (namely: through a continuous path of smooth, asymptotically flat and scalar flat metrics with minimal boundary) to the simplest one we know, the Schwarzschild solution. The fact that this can be done is, in a sense, far from obvious as we know how large and rich the space of such solutions can be (the reader may take a look at the localised data constructed by Schoen and the author in [9]). Differently phrased, such a connectedness result rules out a nightmare scenario of infinitely many islands of solutions, with the most exotic ones separate from the others. As it has been recently pointed out in [31] this positive conclusion is consistent with the landscape predicted by the so-called Final State Conjecture in general relativity.
References
Aubin, T.: Métriques riemanniennes et courbure. J. Differ. Geom. 4, 383–424 (1970)
Bamler, R., Kleiner, B.: Ricci flow and contractibility of spaces of metrics, preprint. arXiv:1909.08710
Bamler, R., Kleiner, B.: Uniqueness and stability of ricci flow through singularities, preprint. arXiv:1709.04122
Bérard-Bergery, L.: Scalar curvature and isometry group, Spectra of Riemannian Manifolds, pp. 9–28. Kaigai Publications, Tokyo (1983)
Botvinnik, B., Ebert, J., Randal-Williams, O.: Infinite loop spaces and positive scalar curvature. Invent. Math. 209(3), 749–835 (2017)
Botvinnik, B., Gilkey, P.B.: Metrics of positive scalar curvature on spherical space forms. Can. J. Math. 48(1), 64–80 (1996)
Botvinnik, B., Hanke, B., Schick, T., Walsh, M.: Homotopy groups of the moduli space of metrics of positive scalar curvature. Geom. Topol. 14(4), 2047–2076 (2010)
Carlotto, A., Li, C.: Constrained deformations of positive scalar curvature metrics, preprint arXiv:1903.11772
Carlotto, A., Schoen, R.: Localizing solutions of the Einstein constraint equations. Invent. Math. 205(3), 559–615 (2016)
Carlotto, A., Wu, D.: Contractibility results for spaces of Riemannian metrics on the disc, preprint. arXiv:1908.02475
Carr, R.: Construction of manifolds of positive scalar curvature. Trans. Am. Math. Soc. 307(1), 63–74 (1988)
Cerf, J.: Sur les difféomorphismes de la sphère de dimension trois \((\Gamma _{4}=0)\), Lecture Notes in Mathematics, No. 53, Springer-Verlag, Berlin-New York (1968)
Chen, Y.G., Giga, Y., Goto, S.: Uniqueness and existence of viscosity solutions of generalized mean curvature ow equations. J. Differ. Geom. 33(3), 749–786 (1991)
Choquet-Bruhat, Y.: Théorème d’existence pour certains systèmes d’équations aux dérivées partielles non linéaires. Acta Math. 88, 141–225 (1952)
Choquet-Bruhat, Y., Geroch, R.: Global aspects of the Cauchy problem in general relativity. Comm. Math. Phys. 14, 329–335 (1969)
Dinkelbach, J., Leeb, B.: Equivariant Ricci ow with surgery and applications to finite group actions on geometric 3-manifolds. Geom. Topol. 13(2), 1129–1173 (2009)
Druet, O.: Sharp local isoperimetric inequalities involving the scalar curvature. Proc. Am. Math. Soc. 130(8), 2351–2361 (2002)
Evans, L.C., Spruck, J.: Motion of level sets by mean curvature I. J. Differ. Geom 33(3), 635–681 (1991)
Gajer, P.: Riemannian metrics of positive scalar curvature on compact manifolds with boundary. Ann. Global Anal. Geom. 5(3), 179–191 (1987)
Gao, L.Z., Yau, S.-T.: The existence of negatively Ricci curved metrics on three-manifolds. Invent. Math. 85(3), 637–652 (1986)
Gray, A., Vanhecke, L.: Riemannian geometry as determined by the volumes of small geodesic balls. Acta Math. 142(1), 157–198 (1979)
Gromov, M.: Stable mappings of foliations into manifolds. Izv. Akad. Nauk SSSR Ser. Mat. 33, 707–734 (1969)
Gromov, M.: A Dozen Problems, Questions and Conjectures About Positive Scalar Curvature, Foundations of Mathematics and Physics One Century After Hilbert, pp. 135–158. Springer, Cham (2018)
Gromov, M., LawsonLawson Jr., H.B.: The classification of simply connected manifolds of positive scalar curvature. Ann. Math. (2) 111(3), 423–434 (1980)
Gromov, M., Lawson Jr., H.B.: Spin and scalar curvature in the presence of a fundamental group I. Ann. Math. (2) 111(2), 209–230 (1980)
Gromov, M., Lawson Jr., H.B.: Positive scalar curvature and the Dirac operator on complete Riemannian manifolds. Inst. Hautes Études Sci. Publ. Math. 58, 83–196 (1983)
Hamilton, R.S.: Three-manifolds with positive Ricci curvature. J. Differ. Geom. 17(2), 255–306 (1982)
Hanke, B.: Positive scalar curvature on manifolds with odd order abelian fundamental groups, preprint. arXiv:1908.00944
Hanke, B., Schick, T., Steimle, W.: The space of metrics of positive scalar curvature. Publ. Math. Inst. Hautes Études Sci. 120, 335–367 (2014)
Hatcher, A.E.: A proof of the Smale conjecture, \({\rm Diff}(S^{3})\simeq {\rm O}(4)\). Ann. Math. (2) 117(3), 553–607 (1983)
Hirsch, S., Lesourd, M.: On the moduli space of asymptotically at manifolds with boundary and the constraint equations, preprint. arXiv:1911.02687
Hitchin, N.: Harmonic spinors. Adv. Math. 14, 1–55 (1974)
Jaco, W.: Lectures on three-manifold topology, CBMS Regional Conference Series in Mathematics, vol. 43. American Mathematical Society, Providence, R.I. (1980)
Kazdan, J.L., Warner, F.W.: Existence and conformal deformation of metrics with prescribed Gaussian and scalar curvatures. Ann. Math. (2) 101, 317–331 (1975)
Kazdan, J.L., Warner, F.W.: Prescribing curvatures, Differential geometry (Proc. Sympos. Pure Math., Vol. XXVII, Stanford Univ., Stanford, Calif., 1973), Part 2, pp. 309–319 (1975)
Kerin, M., Wraith, D.: Homogeneous metrics on spheres. Irish Math. Soc. Bull. 51, 59–71 (2003)
Kleiner, B., Lott, J.: Singular Ricci ows I. Acta Math. 219(1), 65–134 (2017)
Kosinski, A.A.: Differential Manifolds, Pure and Applied Mathematics, vol. 138. Academic Press Inc, Boston, MA (1993)
Kreck, M., Stolz, S.: Nonconnected moduli spaces of positive sectional curvature metrics. J. Am. Math. Soc. 6(4), 825–850 (1993)
Kuiper, N.H.: On conformally: at spaces in the large. Ann. Math. (2) 50, 916–924 (1949)
Kuiper, N.H.: On compact conformally Euclidean spaces of dimension \(>2\) 2. Ann. Math. (2) 52, 478–490 (1950)
Lawson Jr., H.B.: Complete minimal surfaces in S3. Ann. Math. (2) 92, 335–374 (1970)
Lawson Jr., H.B., Michelsohn, M.-L.: Spin geometry, Princeton Mathematical Series, vol. 38. Princeton University Press, Princeton, NJ (1989)
LeBrun, C.: On the scalar curvature of complex surfaces. Geom. Funct. Anal. 5(3), 619–628 (1995)
LeBrun, C.: Kodaira dimension and the Yamabe problem. Commun. Anal. Geom. 7(1), 133–156 (1999)
Lee, J.M., Parker, T.H.: The Yamabe problem. Bull. Am. Math. Soc. (N.S.) 17(1), 37–91 (1987)
Li, C., Mantoulidis, C.: Positive scalar curvature with skeleton singularities. Math. Ann. 374(1–2), 99–131 (2019)
Lichnerowicz, A.: Spineurs harmoniques. C. R. Acad. Sci. Paris 257, 7–9 (1963)
Lohkamp, J.: The space of negative scalar curvature metrics. Invent. Math. 110(2), 403–407 (1992)
Lohkamp, J.: Scalar curvature and hammocks. Math. Ann. 313(3), 385–407 (1999)
Mantoulidis, C., Schoen, R.: On the Bartnik mass of apparent horizons. Class. Quantum Gravity 32(20), 205002 (2015). 16
Marques, F.: Deforming three-manifolds with positive scalar curvature. Ann. Math. (2) 176(2), 815–863 (2012)
McFeron, D., Székelyhidi, G.: On the positive mass theorem for manifolds with corners. Commun. Math. Phys. 313(2), 425–443 (2012)
Miao, P.: Positive mass theorem on manifolds admitting corners along a hypersurface. Adv. Theor. Math. Phys. 6(6), 1163–1182 (2002)
Milnor, J.: A unique decomposition theorem for 3-manifolds. Am. J. Math. 84, 1–7 (1962)
Moishezon, B., Robb, A., Teicher, M.: On Galois covers of Hirzebruch surfaces. Math. Ann. 305(3), 493–539 (1996)
Moore, J.D.: Lectures on Seiberg–Witten Invariants: Lecture Notes in Mathematics, vol. 1629. Springer, Berlin (1996)
Morgan, F., Johnson, D.L.: Some sharp isoperimetric theorems for Riemannian manifolds. Indiana Univ. Math. J. 49(3), 1017–1041 (2000)
Nirenberg, L.: The Weyl and Minkowski problems in differential geometry in the large. Commun. Pure Appl. Math. 6, 337–394 (1953)
Perelman, G.: The entropy formula for the Ricci ow and its geometric applications. preprint arXiv:math/0211159
Perelman, G.: Finite extinction time for the solutions to the Ricci ow on certain three-manifolds. Preprint arXiv:hep-th/0307245
Perelman, G.: Ricci ow with surgery on three-manifolds, preprint arXiv:math/0303109
Reiser, P.: Moduli spaces of metrics of positive scalar curvature on topological spherical space forms, preprint. arXiv:1909.09512
Rosenberg, J., Stolz, S.: Metrics of positive scalar curvature and connections with surgery, Surveys on surgery theory. Ann. Math. Stud. 2, 353–386 (2001)
Ruberman, D.: An obstruction to smooth isotopy in dimension 4. Math. Res. Lett. 5(6), 743–758 (1998)
Schick, T.: A counterexample to the (unstable) Gromov–Lawson–Rosenberg conjecture. Topology 37(6), 1165–1168 (1998)
Schick, T.: The topology of positive scalar curvature, In: Proceedings of the International Congress of Mathematicians—Seoul 2014. Vol. II, 1285–1307, Kyung Moon Sa, Seoul (2014)
Schoen, R.: Conformal deformation of a Riemannian metric to constant scalar curvature. J. Differ. Geom. 20(2), 479–495 (1984)
Schoen, R., Yau, S.-T.: Positive scalar curvature and minimal hypersurface singularities, preprint. arXiv:1704.05490
Schoen, R., Yau, S.-T.: Existence of incompressible minimal surfaces and the topology of three-dimensional manifolds with nonnegative scalar curvature. Ann. Math. (2) 110(1), 127–142 (1979)
Schoen, R., Yau, S.-T.: On the proof of the positive mass conjecture in general relativity. Commun. Math. Phys. 65(1), 45–76 (1979)
Schoen, R., Yau, S.-T.: On the structure of manifolds with positive scalar curvature. Manus. Math. 28(1), 159–183 (1979)
Schoen, R., Yau, S.-T.: Complete three-dimensional manifolds with positive Ricci curvature and scalar curvature. In: Seminar on Differential Geometry, 209–228, Ann. of Math. Stud., 102, Princeton Univ. Press, Princeton, NJ (1982)
Smale, S.: Diffeomorphisms of the 2-sphere. Proc. Am. Math. Soc. 10, 621–626 (1959)
Stolz, S.: Simply connected manifolds of positive scalar curvature. Ann. Math. (2) 136(3), 511–540 (1992)
Taubes, C.H.: The Seiberg–Witten invariants and symplectic forms. Math. Res. Lett. 1(6), 809–822 (1994)
Teicher, M.: Hirzebruch surfaces: degenerations, related braid monodromy, Galois covers, Algebraic geometry: Hirzebruch 70 (Warsaw, 1998), 305–325, Contemp. Math., 241, Amer. Math. Soc., Providence, RI (1999)
Walsh, M.: The space of positive scalar curvature metrics on a manifold with boundary, preprint. arXiv:1411.2423
Walsh, M.G.: Aspects of positive scalar curvature and topology I. Irish Math. Soc. Bull. 80, 45–68 (2017)
Walsh, M.G.: Aspects of positive scalar curvature and topology II. Irish Math. Soc. Bull. 81, 57–95 (2018)
Weyl, H.: Über die bestimmung einer geschlossenen konvexen fläche durch ihr linienelement, Vierteljahrschr. Naturforsch. Ges. Zür 61, 40–72 (1916)
Wiemeler, M.: On moduli spaces of positive scalar curvature metrics on highly connected manifolds. preprint arXiv:1610.09658
Acknowledgements
The present article is an expanded version of the invited address delivered by the author during the XXI Congresso dell’Unione Matematica Italiana held in Pavia, from September 2nd to September 7th, 2019. I would like to thank the scientific committee for their kind invitation, and the organising committee for putting together such a beautiful event. In addition, I would like to express my sincere gratitude to my student Giada Franz for providing a preliminary set of notes that turned out to be extremely useful in the preparation of this survey, as well as to the anonymous referee, whose suggestions were highly appreciated.
This article was completed while the author was a visiting scholar at the Institut Mittag-Leffler: the excellent working conditions and the support of the Royal Swedish Academy of Sciences are gratefully acknowledged.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendices
Appendix A. Left-invariant metrics on \(S^3\)
Here we present the proof of the following simple, yet partly surprising result:
Proposition A.1
The three-dimensional sphere \(S^3\), identified with the Lie group \({\text {SU}}(2)\), supports left-invariant metrics of negative scalar curvature.
Proof
Given the identification in the statement, the tangent space at the identity (namely: \(\mathfrak {s}\mathfrak {u}(2)\)) is spanned by the basis
Hence, we define on \(\mathfrak {su}(2)\):
Set \(\epsilon _i = e_i/\sqrt{\mu _i}\) for \(i=1,\ldots ,3\). Then, as it easily checked (cf. e.g. [36] for all details), the sectional curvatures of \((S^3,g)\) are given by
and cyclic permutations. Hence, the scalar curvature of this manifold is given by
constrained to the open octant \(\{\mu _1>0,\, \mu _2>0,\, \mu _3>0\}\). Therefore, choosing \(\mu _1=\sigma \), \(\mu _2=\sigma ^2\), \(\mu _3=\sigma ^3\) for a parameter \(\sigma >0\), we obtain
thus \(R_g \simeq -2\sigma ^{-4}\) as \(\sigma \rightarrow 0^+\), whence the conclusion is straightforward. \(\square \)
Appendix B. Trichotomy theorem
We shall state here, for the sake of completeness a basic but fundamental fact about the conformal geometry of closed manifolds of dimension at least three, that is sometimes cited in the literature as trichotomy theorem.
Theorem B.1
Let \((X^n,g_0)\) be a closed Riemannian manifold. Define the Yamabe invariant of the conformal class \([g_0] = \{ g = e^{2f}g_0 {\ :\ }f\in C^\infty (X) \}\) as
where \(E(g) = \int _X R_g\). Then, there are exactly three mutually distinct possibilities:
-
(1)
\(Y([g_0])>0\), if and only if there exists \(g\in [g_0]\) with \(R_g>0\), if and only if \(\lambda _1(-L) > 0\).
-
(2)
\(Y([g_0])=0\), if and only if there exists \(g\in [g_0]\) with \(R_g=0\), if and only if \(\lambda _1(-L) = 0\).
-
(3)
\(Y([g_0])<0\), if and only if there exists \(g\in [g_0]\) with \(R_g<0\), if and only if \(\lambda _1(-L) < 0\).
Here L is the conformal Laplace operator, i.e.
It is perhaps appropriate to note here how, in sketching the proof of Theorem 1.4, we did not rely on the full strength of the statement above but only the following straightforward lemma.
Lemma B.2
Given a closed Riemannian manifold \((X^n,g_0)\), if \(E(g_0)<0\), then \(\lambda _1(-L) < 0\). As a result, there exists \(g\in [g_0]\) with \(R_g<0\).
Proof
We recall the variational characterization of the first eigenvalue of an elliptic operator, which in this case reads
Now, an admissible competitor for the above minimization problem is \(u=1\), so
If we set \(g=u^{4/(n-2)}g_0\) and recall that \(R(g) = -c(n)^{-1} u ^{-\frac{n+2}{n-2}} Lu\), we can just deform the Riemannian manifold \((X,g_0)\) using the first (positive) eigenfunction of the conformal Laplacian. This is an elliptic way of spreading the curvature, as we explained above.
Rights and permissions
About this article

Cite this article
Carlotto, A. A survey on positive scalar curvature metrics. Boll Unione Mat Ital 14, 17–42 (2021). https://doi.org/10.1007/s40574-020-00228-7
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40574-020-00228-7