
Abstract
To meet the tighter emission standard of the diesel engine and save energy, various energy recovery and utilization systems (ERUSs) of excavator boom began to be applied. In this paper, a new ERUS of excavator boom was proposed and designed for a 20-ton traditional excavator (TE) based on flow regeneration and balance theory. In the new ERUS, partial potential energy of excavator boom can be utilized directly, and other partial potential energy of excavator boom is accumulated and released within only one hydraulic–hydraulic circuit. When the models of working device and working device with the new ERUS were built and simulated by AMEsim software based on proportion integration differentiation control strategy and the typical working cycle of TE, it can been seen that the new ERUS can meet the working requirement. Calculating and analyzing the influences of main parameters on the energy saving efficiency of the new ERUS, the optimal parameters are achieved. Then, the performance of new ERUS with optimal parameters is analyzed, some conclusion achieved that the potential energy utilization rates of boom is 20.1%, 24.9 L oil is regenerated, and 37.8 L oil and 41.6% energy are saved.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Driven by the cylinders, the working device of TE, which is mainly composed of boom, arm, bucket and cylinders, carries out the work of digging, loading and unloading. During the operation process, supporting the other parts of the working device, driven by the boom cylinder, the boom moves up and down frequently to cooperate with arm and bucket to complete the work, and a large amount of potential energy is dissipated as heat. According to the literature [1], this energy consumption accounts for more than 15% of the total consumption of the TE.
With the stricter emission standard for off-road diesel engine released, the ERUS of excavator boom has been paid more attention by academic and industry. At present, various ERUSs of excavator boom have been proposed, such as hydraulic [2,3,4], electrical [5,6,7], flow regeneration [8] and balance theory [9, 10] ERUS. The hydraulic ERUS accumulates and releases the liquid energy with hydraulic accumulator (HA) during the process of the boom falling and rising and has been used by Caterpillar [11] and Liebherr [12]. In the electrical ERUS, used in Kobelco [13] and KYB [14, 15], the potential energy of boom is changed into electric energy accumulated by a battery or capacitance when the boom falls, and the accumulated electric energy is transformed into kinetic energy by the electric motor and to drive the main pump with the engine when the boom rises. Due to the oil of the none-rod cavity of boom cylinders (NRCBCs) flows back to tank, leading to flow loss when the boom of TE moves downward, the flow regeneration was proposed to lead partial oil of NRCBCs into rod cavity of boom cylinders (RCBCs) to reduce the flow loss in the literature [8]. In the balance theory ERUS, a balance cylinder is arranged parallel to the boom cylinders. When the boom moves downward, the potential energy of the boom is converted into hydraulic energy collected by a HA. According to the literature, energy saving efficiency of the above four types of ERUS is about 10–27%, 15–25%, 33% and 20–29%, respectively.
Based on the ERUSs above, the flow regeneration ERUS has been synthesized to hydraulic and electrical ERUSs and formed hydraulic and electrical flow regeneration ERUSs [16, 17], respectively. Although these two synthesized systems can achieve the functions of the hydraulic or electrical and flow regeneration ERUSs, they need hydraulic–electric–hydraulic or hydraulic–hydraulic storage and release energy circuits, to achieve the conversion and utilization of energy. Based on the flow regeneration and balance theory, a new flow regeneration and balance theory ERUS is proposed for a 20-ton TE in this study, in which partial potential energy of excavator boom can be utilized directly, and other partial potential energy of excavator boom is accumulated and released within only one hydraulic–hydraulic circuit. The models of working device and working device with the new ERUS of the 20-ton TE are established by the AMESim software based on detail designing of the new system. Performance of the new ERUS is simulated by the models.
This paper is arranged as follows: The operation principle of new ERUS is illustrated in Sect. 2. The main parameters of the HA, balance cylinder and boom cylinders are designed in Sect. 3. The simulation models of the working device and working device with new ERUS are established by the AMESim software in Sect. 4. The performance of new ERUS is analyzed in Sect. 5. Conclusions are summarized and listed in Sect. 6.
2 Operation principle
2.1 The working device of TE
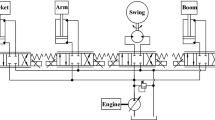
The composition and hydraulic principle of working device of a 20-ton TE are shown in Fig. 1. And its main parameters are listed in Table 1. The boom 12, arm 13 and bucket 14, driven by cylinders 1–3 which are controlled by the reversing valves of 5, 6, 4, and supplied oil by main pumps, rotate around the hinge points of 15–17, respectively.

The working device of TE
The circuit of excavator boom, shown in Fig. 2, is composed of boom cylinders 1–2, reversing valve 3, engine 4, main pump 5 and relief valve 6. During the process of boom falling, the potential energy of boom is transformed into heat energy when the oil is pumped into the RCBCs passing the choke of reversing valve 3. And during the process of boom rising, the oil enters the reversing valves to NRCBCs.

The circuit of excavator boom
2.2 Flow regeneration
When one-way valves 7–8 and throttle valves 9–10 are added to the circuit of excavator boom, the flow regeneration circuit will be formed, as shown in Fig. 3 [8]. In the flow regeneration circuit, the oil return pressure of the NRCBCs is increased by the one-way valve 7 and throttle valve 10; and one part oil of the NRCBCs enters into the RCBCs via the reversing valve 3 to realize the flow regeneration, and the other part returns to tank via throttle valve 10 when the boom falls.

The flow regeneration circuit
2.3 Balance theory
The ERUS based on balance theory, shown in Fig. 4, is formed by adding a balance unit to the circuit of excavator boom [9]. The balance unit consists of balance cylinder 7, HA 8, reversing valves 9–11 and relief valve 12 [10]. And the balance cylinder 7 is arranged parallel to the boom cylinders 1–2. When the boom falls, the oil is pumped into the RCBCs through reversing valve 3 and partial potential energy is converted into hydraulic energy by balance cylinder 7 and collected by a HA via the reversing valves 10–11. When the boom rises, the high pressure oil of HA enters into the none-rod cavity of balance cylinder via the reversing valves 10–11. The boom is driven by HA and main pump. When the boom falls to fulfill the digging action, the oil is released from HA to the rod cavity of balance cylinder via the reversing valves 11 and 9 to increase the digging force of the bucket or arm.

The ERUS based on balance theory
2.4 A new ERUS based on flow regeneration and balance theory
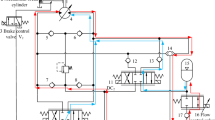
Based on the operation principle of flow regeneration and balance theory, a new ERUS is synthesized in this paper as shown in Fig. 5. For this new ERUS, when the boom falls, one part oil of the NRCBCs enters into the RCBCs via the reversing valve 3, one-way valve 13 to directly realize utilization of potential energy and the other part oil of the NRCBCs returns to tank via throttle valve 16; at the same time, a part of boom potential energy is converted into hydraulic energy in the none-rod cavity of balance cylinder 7, and when the oil in the none-rod cavity of balance cylinder 7 get into the HA 8, the hydraulic energy is accumulated; when the potential energy is utilized, the operation principle of the new ERUS is similar to the ERUS based on balance theory. The energy recovery and utilization of the new ERUS is realized only in the balance unit.

The new ERUS based on flow regeneration and balance theory
3 Parameter matching for the new ERUS
3.1 The determination of the cylinders specification
To meet the working requirements of TE, the sum of area of balance cylinder and boom cylinders in the new ERUS should be equal to the area of boom cylinders of TE. According to the requirement of component unification, the size of balance cylinder is selected equal to the boom cylinders in the new ERUS. It means:
where Db, db are the piston and piston rod diameters of balance cylinder and boom cylinders of the new ERUS. DD, dD are the piston and piston rod diameters of boom cylinder of TE. According to Table 1, Db and db are calculated and rounded as 100 mm and 70 mm, respectively.
3.2 The operational principle of hydraulic HA
In this paper, the bladder HA is selected as the energy storage component in the new ERUS for its fast response and low cost. The bladder HA is mainly composed of air valve 1, bladder 2, steel shell 3 and mushroom valve 4 as shown in Fig. 6. And Fig. 6(a), (b), (c), (d) illustrates the initial, released energy, accumulated energy and arbitrary working states of HA, respectively, where the pi and Vi (i = 0, 1, 2 and a) are the pressure and volume of HA corresponding to the four states.

The structure and working principle of HA
During the process of boom falling, if pa is lower than p2, the oil of the none-rod cavity of balance cylinder enters into the HA, and the HA is accumulating energy; if pa reaches p2, the HA stops accumulating energy and keeps in its accumulated energy state. During the process of boom rising, if pa is higher than p1, the high pressure oil of HA enters into the none-rod cavity of balance cylinder and the HA is releasing energy; if pa reaches p1, the HA stops releasing energy and keeps in its released energy state. The efficiency of HA is determined by its p0, p1, p2 and V0.
3.3 Determination of Working pressures of HA
According to the Boyle’s law [18], the air in the HA follows the ideal air law, so
where n is the air polytropic exponent and equal to 1.4 for the falling time of the boom is short.
During the process of boom falling, the oil pressure of the none-rod cavity of balance cylinder increases with the increase in pa of the HA, which will lead to the difficulty of the boom falling and affect the work and efficiency of the new ERUS. To avoid this phenomenon, p2 of the HA should be lower than the maximum pressure of NRCBC of TE. According to Table 1, p2 should no more than 26.5 MPa. The accumulated energy E of the HA can be calculated as follows:
Equation (4) indicates that the accumulated energy E of HA increases with the increase in V0. If the energy density Ev of HA, which is calculated as Eq. (5), reaches its maximum, the limited installation space of HA on the excavator can achieve the maximum utilization. And the maximum energy density of HA can be calculated by derivative of p1 with respect to E as Eq. (6). Then, the relationship of p1 and p2 can be obtained as follows: \({{p_{1} } \mathord{\left/ {\vphantom {{p_{1} } {p_{2} }}} \right. \kern-0pt} {p_{2} }} = 0.308\).
If the volume of bladder HA is often changed at oversize, it will influence its service life. To prevent the volume of bladder HA changes too large to contact the inner shell of HA, p2, p0 and p1 of HA should satisfy [19]:
So the working pressure of the HA is primarily selected as follows: p0 = 5.5 MPa, p1 = 6.2 MPa, p2 = 20 MPa.
3.4 Determination of V0 of HA
From the literature [19], the V0 of HA can be calculated as follows:
where ∆Vmax is the maximum volume change of the HA. According to the operation principle of the new ERUS, ∆Vmax is equal to the maximum volume change of the none-rod cavity of balance cylinder, that is,
where Sb is the stroke of balance cylinder. Based on Chapter 3.1 and Table 1, the V0 is initially determined as 25 L.
4 Model simulation
4.1 Establishment of simulation model
According to Figs. 1, 5, Table 1 and the initial parameters matched for new ERUS, the models of working device and working device with the new ERUS of the 20-ton TE are established by the AMESim software, as shown in Figs. 7 and 8, respectively.

The model of working device

The model of working device with the new ERUS
Because this paper focuses on the research of ERUS of boom potential, to simplify the modeling process, the engine is simulated by a motor and the arm, and bucket cylinders are actuated by means of a constant pressure source in the two models. And these simplifies have no impact on the ERUS of boom potential. In order to fulfill the typical working cycle of falling–digging–rising–returning action of working device [20, 21], also the control units, in which the PID control strategy is selected, are included besides the working device and hydraulic system in the two models.
In Fig. 7, the PID control strategy is used to control the speeds of boom, arm and bucket via adjusting reversing valves 4–6.
In Fig. 8, the PID control strategy is used to control the speeds of boom, arm and bucket and the energy accumulation and release time of HA via adjusting the reversing valves 5–10 and throttle valves 12–13.
4.2 The simulation actions of boom cylinders
The actions of boom cylinders are simulated by the two models. And the piston displacement and velocity of the boom cylinders of TE and TE with the new ERUS are shown in Fig. 9(a) and (b). It can be seen that the two models of TE and TE with the new ERUS can realize the simulation of typical working cycle of TE successfully under the PID control strategy. In the typical working cycle, the actions of boom falling, digging, rising and returning take place about in 0–3.5 s, 3.5–7.5 s, 7.5–12 s, 12–15.5 s and 15.5–20 s, respectively.

The piston displacement and velocity of the boom of TE and new ERUS with initial parameters
Figure 9a, b reveals that although there are some deviations between the piston displacement and velocity of boom cylinders of new ERUS with initial parameters and the ones of TE, the action process of the piston displacement and velocity of the boom cylinders of the two system basically coincide with each other. Therefore, the new ERUS can meet the working requirement.
5 The performance analysis of new ERUS
5.1 The influences of the main parameters on the energy saving efficiency
Analyzing the operation principle of the new ERUS, the energy saving efficiency of new ERUS will be influenced by p0 and V0 of HA and choke area of throttle valve 16 (CATV), which is set in the NRCBCs return circuit as shown in Fig. 5. The influences of p0, V0 and CATV on the energy saving efficiency are calculated with the model of new ERUS as shown in Fig. 10a–c, respectively.

The influences of the various parameters on the energy saving efficiency
From Fig. 10, it can be found that the influences of p0, V0 and CATV on the energy saving efficiency of the new ERUS are roughly similar. The energy saving efficiency increases first and then decreases with the increase in p0, V0 and CATV. And the energy saving efficiency achieves the maximum value when p0, V0 and CATV are 4.4 MPa, 25 L and 17 mm2, respectively.
5.2 The action of boom cylinders with the optimal parameters
The model of new ERUS with the optimal parameters is simulated, and the displacement and velocity of the boom cylinder piston, compared with the ones of TE and new ERUS with initial parameters, are shown in Fig. 11a, b.

The piston displacement and velocity of boom cylinders of TE and new ERUS with optimal and initial parameters
According to Fig. 11, it can be seen that the displacement and velocity of boom cylinders of new ERUS with the optimal parameters are more consistent with the TE than those of the new ERUS with initial parameters. And the new ERUS with initial parameters can better meet the working requirement.
5.3 The performance of new ERUS with optimal parameters
5.3.1 Analysis of potential energy recovery and utilization
According to the simulation, the energy recovery and energy utilization of new ERUS with optimal and initial parameters are shown in Figs. 12 and 13.

The potential energy of TE and energy recovery in new ERUS with optimal and initial parameters

The energy utilization in new ERUS with optimal and initial parameters
From Fig. 12, it can be observed that 44.8 kJ and 21.9 kJ of 178.2 kJ potential energy of the boom of TE are converted into hydraulic energy in new ERUS with optimal and initial parameters, respectively, during the process of boom falling. And the recovery rates of potential energy of new ERUS with optimal and initial parameters are 25.1% and 12.3%, respectively.
According to Fig. 13, it can be seen that 35.8 kJ and 16.5 kJ of hydraulic energy, accumulated by HA, are utilized during the process of boom rising in new ERUS with optimal and initial parameters. And the energy utilization rates of the converted hydraulic energy are 79.9% and 75.3% in new ERUS with optimal and initial parameters, respectively.
Consequently, the potential energy utilization rates of boom are 20.1% and 9.3% in new ERUS with optimal and initial parameters, respectively.
5.3.2 Analysis of flow regeneration
In view of the simulation, to complete the typical working cycle, when the boom falls, 24.9 L and 0 L oil are supplied by main pump in the TE and the new ERUS; when the boom rises, 43.9 L and 31 L oil are supplied by main pump in the TE and the new ERUS as shown in Table 2. It means that 24.9 L oil is regenerated and 37.8 L oil is saved in one working cycle in the new ERUS.
5.3.3 Analysis of the energy saving
The energy supply of main pump in the TE and new ERUS with initial and optimal parameters is shown in Fig. 14. It can be seen that energy needs to be continuously supplied by main pump with a total energy requirement of 1482.8 kJ in the TE. However, for the new ERUS with optimal and initial parameters, no energy need to be supplied in 0–7.5 s and only 865.6 kJ and 999.4 kJ energy need to be supplied in 7.5–12.5 s. In other words, compared with the TE, the new ERUS with optimal parameters saves 41.6% energy.

The energy supply of main pump
6 Conclusion
In order to improve the energy utilization rate of the TE, a new ERUS of excavator boom is proposed and designed for a 20-ton TE based on flow regeneration and balance theory. When the simulation models of the working device and working device with the new ERUS are built with AMEsim software, the influences of main parameters are calculated and the performance of the new ERUS is analyzed. And some conclusions are as follows:
- 1.
The optimal parameters of p0, V0 and CATV are obtained. Analyzing the actions of boom cylinders, it can be inferred that the actions of boom cylinders with optimal parameterized new ERUS is more consistent with that of the TE than with the initial parameterized one. And the new ERUS with optimal parameters can better meet the working requirement of TE.
- 2.
Compared with the TE, potential energy utilization rates of boom are 20.1% and 9.3% in new ERUS with optimal and initial parameters, respectively.
- 3.
According to the simulation of the models, 24.9 L oil is regenerated and 37.8 L oil and 41.6% energy are saved in one working cycle in the new ERUS with optimal parameters.
References
Hiroaki I (2008) Introduction of PC200_8 hybrid hydraulic excavators. Komatsu Tech Rep 54(161):26–31 (in Japanese)
Casoli P, Riccò L, Campanini F, Bedotti A (2016) Hydraulic hybrid excavator-mathematical model validation and energy analysis. Energies MDPI 9:1002. https://doi.org/10.3390/en9121002
Hippalgaonkar R, Ivantysynova M (2013) A series-parallel hydraulic hybrid mini-excavator with displacement controlled actuators. In: The 13th Scandinavian international conference on fluid power, Linköping, Sweden, pp 31–42
Shen W, Jiang JH, Su XY, Karimi HR (2015) Control strategy analysis of the hydraulic hybrid excavator. J Frankl Inst 352(2):541–561. https://doi.org/10.1016/j.jfranklin.2014.04.007
Yoon J II, Truong DQ, Ahn KK (2013) A generation step for an electric excavator with a control strategy and verifications of energy consumption. Int J Precis Eng Manuf 14(5):755–766. https://doi.org/10.1007/s12541-013-0099-6
Das D, Chowdhury P, Truong BNM, Ahn KK et al (2015) A novel energy recuperation system for hybrid excavator using hybrid actuator. In: The 15th international conference on control, automation and systems, Busan, Korea
Choi J, Kim H, Yu S et al (2011) Development of integrated controller for a compound hybrid excavator. J Mech Sci Technol 25(6):1557–1563
Shenouda A, Book W (2005) Energy saving analysis using a four-valve independent metering configuration controlling a hydraulic cylinder. In: 2005 SAE commercial vehicle engineering conference, Chicago, Illinois, USA. https://doi.org/10.4271/2005-01-3632
Sun W, Virvalo T (2005) Simulation study on a hydraulic-accumulator-balancing energy saving system in hydraulic boom. In: 50th national conference on fluid power, Las Vegas, Nevada, pp 371–381
Ren HL, Lin TL, Ye YY, Fu SJ (2017) Parameters design and experiment of boom potential energy recovery system based on balance cylinder. China J Highw Transp 30(2):153–158 (In Chinese)
Rydberg KE (2005) Energy efficient hydraulic systems and regenerative capabilities. In: The 9th Scandinavian international conference on fluid power, Linköpings, Sweden, pp 1–12
Boehm D, Hollander C, Landmann T (2011) Hybrid drives in crawler excavators: concepts and solutions. In: The third symposium on hybrid drive systems for mobile machinery, Karlsruhe, Germany
Kagoshima M, Komiyama M, Nanjo T, Akira T (2007) Development of new hybrid excavators. Kobelco Technol Rev 27:39–42. https://doi.org/10.1016/S0960-894X(99)00396-0
Egawa M, Kawasaki H Study of electro-hydraulic energy saving system (EHESS) for construction machinery. In: The 12th Scandinavian international conference on fluid power, Tampere, Finland
Kawasaki H, Egawa M (2011) Controller of hybrid construction machine: US. US20110072810
Zhang SZ, Deng B, Ke J (2010) Research on energy regeneration of hydraulic excavator’ s boom based on hydraulic transformer. China Mech Eng 21(10):1161–1166 (in Chinese)
Choi K, Seo J, Nam Y, Kim KU (2015) Energy-saving in excavators with application of independent metering valve. J Mech Sci Technol 29(1):387–395. https://doi.org/10.1007/s12206-014-1245-5
Ge L, Quan L, Li YW, Zhang XG, Yang J (2018) A novel hydraulic excavator boom driving system with high efficiency and potential energy regeneration capability. Energy Convers Manag 166:308–317
Lin TL, Chen Q, Ren HL, Zhao Y, Miao C, Fu SJ, Chen QH (2017) Energy regeneration hydraulic system via a relief valve with energy regeneration unit. Appl Sci 7(6):613–627. https://doi.org/10.3390/app7060613
JCMAS H020 (2007) Earth-moving machinery—fuel consumption on hydraulic excavator—test procedure
Zhang SZ, Minav T, Pietol M, Kauranne H, Kajaste J (2019) The effects of control methods on energy efficiency and position tracking of an electro-hydraulic excavator equipped with zonal hydraulics. Autom Constr 100:129–144. https://doi.org/10.1016/j.autcon.2019.01.003
Acknowledgements
This research was supported by Shandong Province Key Laboratory of Mine Mechanical Engineering (Grant No. 2019KLMM204)and NSFC-Shanxi coal-based low carbon joint fund focused on supporting project (Grant No. U1510205).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Additional information
Technical Editor: Fernando Antonio Forcellini, Dr.
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Liu, J., Jiao, Z., Xian, F. et al. Energy recovery and utilization system of excavator boom based on flow regeneration and balance theory. J Braz. Soc. Mech. Sci. Eng. 42, 35 (2020). https://doi.org/10.1007/s40430-019-2124-x
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s40430-019-2124-x