
Abstract
To reduce the energy consumption and emission, an innovative powertrain and the energy management strategy are proposed for hydraulic excavator in this paper. The novel powertrain consists of the engine, motor/generator, planetary gear, gearbox, and variable hydraulic pump. The energy regeneration system is also applied on the system to regenerate the potential energy and charge the battery. An improved equivalent consumption minimization strategy is proposed to control the engine, motor/generator, hydraulic pump and gearbox. The engine working points can be located in high efficiency range, with the proposed powertrain and the energy management strategy. To verify the energy saving efficiency of the proposed system, the test bench is built in laboratory. Compared with the current hybrid system, the energy saving efficiency reaches 11% in condition of a large velocity. Compared with the current hybrid system and conventional system, the energy saving efficiencies are 4% and 48% respectively with different cylinder velocities. The fuel consumption and emission of hydraulic excavator can be reduced effectively with the proposed powertrain and energy management strategy.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Currently, 60% of the carbon dioxide emissions is produced by the off-road machinery in construction machines [1]. Facing the energy crisis and environmental pollution, energy saving of hydraulic excavator is important and significative [2, 3]. To solve this problem, the hybrid technology is research and used in the hydraulic excavator to reduce the energy consumption [4, 5].
Energy regeneration of hybrid hydraulic excavator is an effective way to save energy, because the large amount of potential energy and kinetic energy is existed in actuators, which can be regenerated and stored in energy storage unit (ESU) [6, 7]. Based on the types of ESU, the energy regeneration system can be categorized as electric energy regeneration system (EERS) and hydraulic energy regeneration system (HERS) [8, 9]. The regenerated energy can be stored in battery of supercapacitor through electric generator in EERS [10, 11]. For the HERS, the regenerated energy can be stored in the hydraulic accumulator through hydraulic valves [12, 13]. To reduce the energy consumption of the hydraulic excavator, the stored energy can be reused to drive the actuator independently, or assist the engine to dive the hydraulic system.
A EERS for boom system was proposed by Wang T. et al. [14]. In the proposed system, a hydraulic motor was installed in the return line of the boom cylinder. In boom down mode, the fluid of boom cylinder flowed to the hydraulic motor. The hydraulic motor drove the electric generator to generate electric energy, which is stored in the battery. The energy loose of the energy regeneration system was analyzed. The energy regeneration efficiency was proved to range from 26 to 33% under no load and loaded conditions experimentally. Furthermore, the author proposed a similar system, in which the generator and the hydraulic valve were controlled in boom down mode [15]. Not only energy regeneration efficiency, but also stability of boom was improved.
A hybrid hydraulic forklift system with EERS was researched by Minav T. A. et al. [16]. In the system, a pump/motor unit was used instead of the main pump. The pump/ motor unit worked as hydraulic pump and a hydraulic motor in cylinder up mode and cylinder down mode respectively. Hence, the energy regeneration can be achieved in cylinder down mode.
To improve the energy regeneration efficiency, a EERS of boom was researched by Yu Y.X. et al. [17]. In this system, a variable hydraulic motor was installed in the return line of boom cylinder. In boom down mode, both the displacement of hydraulic motor and generator speed can be controlled to optimize the working points of EERS. Compared with the conventional EERS, the improvement of the energy regeneration efficiency was 3.2–4.1% with the novel structure and control strategy.
HERS was also researched for energy saving of hybrid hydraulic excavator. A HERS for boom was proposed by Ranjan P. et al. [18], the potential energy of boom was regenerated and stored in the accumulator. Compared with the conventional system, the energy saving efficiency researched 10%.
According to Yu Y.X. et al., an energy regeneration system for swing system with two independent accumulators was proposed [19]. Based on the different working conditions, the braking energy can be regenerated and stored in different accumulators. The experimental results showed that the energy regeneration efficiency ranged from 23 to 56%.
Based on the research of Hao Y. et al., a boom system with three-chamber cylinder and hydraulic accumulator was proposed [20]. One chamber was connected to the hydraulic accumulator to regenerate the potential energy of boom. The energy regeneration efficiency ranged from 26.2 to 44.4%.
A dual source hydraulic excavator was proposed by Huang W. et al. [21]. A new dual source hydraulic motor was proposed with two groups of oil inlet and outlet. The hydraulic accumulator, hydraulic pump, and tank can be connected through the novel hydraulic motor. The energy regeneration and reuse can be realized, and the energy consumption was reduced by 48.6% and 46.6% in full load and no-load operation.
To combine the advantages of EERS and HERS and improve the energy regeneration efficiency, an accumulator-motor-generator regeneration system with both battery and hydraulic accumulator was proposed by Lin T. et al. [22]. The potential energy can be stored in battery or hydraulic accumulator to improve the energy regeneration efficiency. Based on the simulation results, the energy regeneration efficiency researched 41% [23]. The experiment was conducted by the author, in which the energy regeneration efficiency researched approximately 39%.
According to Chen Q. et al., a valve-motor-generator and hydraulic accumulator was researched [24]. All the actuators of hydraulic excavator were studied to regenerate energy. Based on the simulation results, the energy regeneration efficiency researched 58%.
The energy regeneration system could save energy of hydraulic excavator effectively. Another important research of energy saving is electric drive system (EDS) for hydraulic excavator. According to the research of Ge L. et al. [25], an EDS with an asymmetric pump was proposed. The electric motor drove the asymmetric pump to provide energy for the hydraulic system. The potential energy can be regenerated through the asymmetric pump. The energy consumption can be reduced by 76.1% with the proposed system.
To further improve the energy saving efficiency, an EDS with a displacement variable pump and a speed variable electric motor was researched [26]. The energy saving efficiency ranged from 28.5% to 33% by controlling both the displacement of pump and the speed of electric motor.
The energy management strategy (EMS) is also an important factor that affects the energy saving efficiency. The equivalent consumption minimization strategy (ECMS) is a typical energy management strategy to control the hybrid system. In ECMS, the electrical energy of the battery is converted into an equivalent amount of fuel consumption by the equivalent factor (EF) [27]. However, conventional ECMS obtained a fixed EF through off-line optimization under specific driving conditions, which cannot maintain the stable SOC under different driving conditions.
Therefore, the adaptive ECMS (A-ECMS) was proposed to make the EF update dynamically [28]. A proportional coefficient was used to update the EF at the previous moment through the deviation of the SOC from the reference value. But this EF update strategy required many experiments to obtain the initial EF and the proportional coefficient.
According to Sun C. et al., an EF update method based on velocity prediction was proposed [29]. A neural network-based velocity predictor was constructed to predict the short-term driving behaviors by learning from the history data. The speed predictor provided temporary driving information for a real-time EF. Compared with the conventional A-ECMS, this method achieved stable SOC trajectory, and the reduction of fuel consumption was 3%.
According to Tian X. et al. [30], a driving style based A-ECMS was proposed, in which the EF was updated by the driving style of driver. Through HIL tests, the fuel economy was improved and the SOC was stable by using this control strategy. Hence, the ECMS was widely used in the hybrid vehicle to reduce the fuel consumption and keep the SOC of battery stable. In the application of the ECMS on a hybrid hydraulic excavator, the ECMS should be modified based on the specific conditions.
Based on the above analysis, the energy regeneration system, EDS and EMS are important factors that affect the energy saving efficiency. Compared with the HERS, the EERS can be applied in the electric hybrid hydraulic excavator, in which the regenerated energy is stored in the battery. Then the stored energy can be reused by the electric motor easily.
However, the energy reuse in drive mode affects the energy saving efficiency of hydraulic excavator. Currently, the research of drive mode is only about the EDS, which is used in the electric excavator. Hence, both energy regeneration and reuse should be researched to improve the energy saving efficiency for a hydraulic hybrid excavator. To solve this problem, an electro- hydraulic continually variable powertrain (EHCVP) was proposed by Yu Y.X. et al. in 2021 [31]. The engine and the electric motor were installed in the powertrain through a planetary gear. The EERS was also setup in the system. In this system, both energy regeneration in boom down mode and energy reused in drive mode were researched. Especially, the engine working points can be controlled in high efficiency range to reduce the fuel consumption. However, due to the limitation of the structure, the engine cannot work in highest efficiency in condition of large velocity. In real engineering, the actuator of the hydraulic excavator, such as boom, works with different velocities in different cycles. Hence, energy saving of hydraulic excavator with a wide range of velocities is important and significative.
Therefore, to further decrease the fuel consumption of hybrid hydraulic excavator, an innovative powertrain for hybrid hydraulic excavator is proposed in this paper. The proposed powertrain consists of an engine, a motor/generator, a hydraulic pump, a two-grade gearbox, and a planetary gear. Optimization of the engine working points and energy regeneration can be achieved to reduce the fuel consumption of this hybrid hydraulic excavator. Compared with EERS, HERS and EDS, not only energy regeneration, but also optimization of energy reuse is researched to improve the energy saving efficiency by using the ECMS. Compared with the EHCVP and the conventional system without EHCVP, the proposed hybrid hydraulic excavator can save 11% and 54% of the energy respectively in condition of the large velocity, and save 4% and 48% of the energy respectively with different velocities.
The remaining paper is organized as follows. The proposed system and energy management strategy are discussed in Sects. 2 and 3, respectively. The experimental results and analysis are presented in Sect. 4. The conclusion is presented in Sect. 5.
2 Structure of the System
2.1 Discussion of the Conventional System
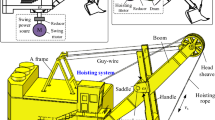
A conventional hydraulic excavator is shown in Fig. 1, in which the engine drives the main pump to provide energy to the hydraulic system. To save energy, the EHCVP was proposed as a powertrain of hydraulic excavator in previous research as shown in Fig. 2. The engine and electric motor/generator not only can drive the main pump separately, but also can drive the main pump together.

Structure of the conventional system

Structure of the EHCVP
In the EHCVP, the electric motor/generator can work as a motor or a generator to provide mechanical energy or generate electric energy. The speed of engine and motor/generator decide the speed of main pump through planetary gear. Then the engine speed can be controlled to the high efficiency range with the EHCVP. A variable displacement pump was installed in system to govern the torque of the engine. Hence, the engine working points can be controlled in the high efficiency range. However, the maximum displacement of the hydraulic pump limits the controlled range of engine torque in condition of a large velocity.
In the condition of a large velocity, the engine efficiency will be decreased, because of the large speed. If a larger hydraulic pump is selected in the system, the engine efficiency can be improved in the condition of a large velocity. But the hydraulic pump will always work with a low and middle displacement, which leads to a low efficiency of hydraulic pump in other conditions. Hence, the current structure of EHCVP limits the improvement of the energy saving efficiency in condition of a large velocity. Finally, the fuel consumption of the total system cannot be improved with varying velocities in real engineering.
2.2 Proposed Innovative EHCVP
To enhance the energy saving efficiency, especially in condition of a large velocity, an innovative EHCVP is proposed in this paper as shown in Fig. 3. A two-speed gearbox is installed between the ring gear shaft and hydraulic pump. The engine torque is governed by the hydraulic pump and gearbox mainly. So, the working range of engine torque can be controlled more flexible than that of the current EHCVP. Meanwhile, the electric motor/generator govern the speed of engine. The proposed EHCVP of this paper is named EHCVP II.

Structure of the proposed system
In the condition of a large velocity, the gearbox works with a large gear ratio to decrease the speed and increase the torque of the engine with EHCVP II. So, the engine can work with a high efficiency in condition of a large velocity. In the condition of the middle and low velocities, the efficiency of the proposed EHCVP II may keep the same level with conventional EHCVP. In summary, the fuel consumption of the EHCVP is improved with the varying velocity in real engineering.
Compared with the EHCVP II, a planetary gear is also used in the power-split system of Toyota [32], in which the engine and two motor/generators are connected to the carrier, sun gear, and ring gear respectively. In the EHCVP II, a variable hydraulic pump connects to the ring gear instead of one motor/generator to adjust the output torque of the engine and provide fluid to the hydraulic system. Furthermore, a gearbox is also setup in the system to improve the energy saving efficiency.
In EHCVP II, the engine, electric motor/generator and gearbox are connected to the carrier, sun gear and ring gear respectively. The rotational speed of each gear follows the Equation (1) [33].
where, Ns and ωs denote the number of teeth and speed of the sun gear, respectively, Nr and ωr are the number of teeth and speed of the ring gear, respectively, and ωc denotes the speed of the carrier. The speed of ring gear follows the Eq. (2).
where ωHP is speed of hydraulic pump. The targe flow rate is given by the joystick signal, and follows the Eq. (3).
where, ηHPv and qc denote the volumetric efficiency and flow rate of hydraulic pump, respectively. Once the displacement of hydraulic pump, and the gear ratio of gearbox are selected, the speed of ring gear can be calculated based on the required flow rate by Eqs. (2 and 3). Then there will be infinity combinations of the engine speed and motor/generator speed can be selected, based on Eq. 1. Then the final control command of engine speed and motor/generator speed will be decided by the control strategy.
The torque of each gear follows the Eq. (4) [34].
where, Tr, Ts, and Tc denote the torque of the ring gear, sun gear, and carrier, respectively. The torque of hydraulic pump is based on pressure of the output side of the hydraulic pump as shown in Eq. (5).
where, THP represents the torque of the hydraulic pump, pc represents the pressure of the output side of the hydraulic pump, DHP denotes the displacement of the hydraulic pump, and ηHPm denotes the hydro-mechanical efficiency of the hydraulic pump. The torque of ring gear is decided by the torque hydraulic pump THP as shown in Eq. (6).
If the required torque of pump and gear ratio are decided, the torque of the engine and motor will be fixed and cannot be controlled. Hence, a variable pump and gearbox are installed in the EHCVP II to extend the controllable range of the engine torque, based on Eqs. (4 and 5).
The energy regeneration system is also installed in the return line of boom cylinder, because the boom has the largest gravitational potential energy among all the actuators. When the boom moves down, the hydraulic motor will drive the generator to generate electric energy. The regenerated energy is saved in battery and will be used by the motor/generator to drive the hydraulic pump in the next working cycle.
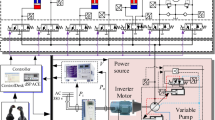
Based on the above analysis, the engine speed and toque are decoupled from the pump speed and torque, and the energy regeneration can also be achieved to reduce the fuel consumption of a hydraulic excavator with EHCVP II. To verify the energy saving of the proposed system, the test bench is built in the laboratory, as shown in Fig. 4. The connection of the real planetary gear is shown in Fig. 5. The hydraulic circuit of the test bench is shown in Fig. 6.

Test bench of the EHCVP II

Connection of planetary gear for EHCVP II

Hydraulic circuit of EHCVP II test bench
A cylinder is set up in the test bench to emulate the boom cylinder of an excavator, and the load is connected to the rod of cylinder. The electric motor 1 and electric motor 2 emulate the engine and motor/generator, respectively. The dual clutch 1 is used as the gearbox, which has two gear ratios. The dual clutch 2 controls the output shaft of dual clutch 1 to be connected to the main pump or the hydraulic motor. If the dual clutch 2 connects the output shaft of dual clutch 1 to the main pump, the system will work as boom up mode. In boom up mode, the main valve works at left position, and the EHCVP II drives the main pump to move the load up. If the dual clutch 2 connects the output shaft of dual clutch 1 to the hydraulic motor, the system will work as boom down mode. In boom down mode, the energy regeneration valve V1 is open, and the fluid from cylinder will flow to the hydraulic motor, which is connected to the EHCVP II. In this condition, the electric motor/generator 2 works as a generator to balance the torque of the hydraulic motor and to regenerate the energy. The hydraulic motor drives the motor/generator 2 through the dual clutch 2 (lift side), double clutch 1, and planetary gear. The speed sensors and torque sensors are installed in each shaft of planetary gear. A pressure sensor is installed in output port of rod chamber of cylinder.
3 Energy Management Strategy
3.1 Discussion on the Control of the System
In boom up mode, the required cylinder velocity is linear to the joystick signal, as shown in Eq. (7)
where, α is the joystick signal, and vreq and vmax are the required velocity and maximum velocity of the boom cylinder, respectively. α ranges from 0 to 100%. Next, the required flow rate qc can be calculated using Eq. (8).
where, Ac is the area of the rod chamber. The pressure of the rod chamber pc is measured using a pressure sensor. The speed of hydraulic pump can be calculated based on Eq. (3). To meet the requited flow rate and enhance the energy saving efficiency, the engine speed, electric motor/generator speed, grade of gearbox, and displacement of hydraulic pump should be controlled. Hence, an energy management strategy is necessary to be applied on the EHCVP II.
3.2 Energy Management Strategy
As mentioned above, the energy management strategy is important to affect the energy saving efficiency of the EHCVP II. To enhance the energy saving efficiency, an equivalent consumption minimization strategy (ECMS) is used as the energy management method. The ECMS was proposed for hybrid vehicle to find the condition of minimum fuel consumption. Based on the characteristics of the EHCVP II, a novel ECMS is proposed as the energy management strategy. The cost function of proposed ECMS is defined as in Eq. (9) [27, 35].
where, \(\dot{m}_{{{\text{tatal}}}}\) is the total equivalent fuel consumption, \(\dot{m}_{{{\text{eng}}}}\) and \(\dot{m}_{{{\text{motor}}}}\) are the equivalent energy consumptions of the engine and electric motor, respectively, and f(SOC) is the penalty factor, which is used to limit the state of charge(SOC) for battery, as shown in Fig. 7.

Penalty factor
Considering the working conditions, energy regeneration, and life of the battery, the range of SOC for battery should be controlled. Based on the discussion in the introduction, the ECMS is widely used in the hybrid vehicle. But the working conditions of vehicle and hydraulic excavator are different. For the hydraulic excavator, the range of velocity is narrower than that of the vehicle. Hence, an adaptive penalty factor can satisfy the requirement of the EHCVP II. However, the curve of penalty factor should be made for the specific system. The principles of the penalty factor design are shown as follow:
-
1.
At the end of each working cycle, the remaining energy of the battery should be enough to drive the system for the next cycle.
-
2.
For the potential energy regeneration in the next working cycle, the SOC of battery cannot reach to 100% at the end of each cycle.
-
3.
The SOC of battery must be always higher than 20% to avoid deep charging and ensure the life of the battery.
Furthermore, the setting of the penalty factor should satisfy the working conditions of the hydraulic excavator with EHCVP II. Hence, the final penalty factor was designed by many experiments, based on the above principles and conditions. Finally, the penalty factor was got in Fig. 7. The largest value of penalty factor is 2.0 in condition of a low SOC to decrease the energy output of the battery. The lowest value of penalty factor is 0.3 to avoid the full charging of the battery.
In ECMS \(\dot{m}_{{{\text{eng}}}}\) and \(\dot{m}_{{{\text{motor}}}}\) can be calculated using Eqs. (10 and 11) [36].
where, ηeng, ηmotor and ηbat denote the efficiency of the engine, electric motor, and battery, respectively. \(\dot{m}_{{{\text{motor}}}}\) represents the equivalent output energy of the battery. In Eq. (11), if the electric motor/generator works as a motor, the directions of speed and torque are the same (ωsTs > 0). On the contrary, ωsTs ≤ 0 means the electric motor/generator works as a generator. Based on Eqs. (4, 5 and 6), the Tc and Ts are calculated and shown in Eqs. (12, and 13).
In Eqs. (12 and 13), the cylinder pressure pc is measured by the pressure sensor. Due to the specific structure of the EHCVP II, the ECMS is different from that of the vehicle. The efficiency of hydraulic part and gearbox are also involved in the calculation of the proposed ECMS. According to Eqs. (9, 10, 11, 12, 3), the proposed ECMS considers the efficiency of engine, battery, and hydraulic pump, SOC of battery, and gear ratio of gearbox. Hence, the proposed ECMS combines the conventional ECMS and the characteristic of the EHCVP II to reduce the fuel consumption. To realize the calculation of proposed ECMS, the progress is shown in Fig. 8.

Calculation progress of proposed ECMS
Firstly, the flow rate and torque of hydraulic pump is calculated by the joystick signal through the Eqs. (3 and 5). Secondly, the speed and torque of ring gear for different gear ratio are calculated respectively. Thirdly, the total equivalent fuel consumptions of different gear ratio are calculated by ECMS respectively. The minimum equivalent consumptions (ṁtotal_min1 and ṁtotal-min2) for each gear ratio are got. Finally, the minimum equivalent fuel consumption (ṁtotal_min) between ṁtotal_min1 and ṁtotal-min2 is got, in which the corresponding speed of engine, speed of electric/motor, displacement of hydraulic pump and gear ratio of the gearbox are selected as the control commands.
In boom down mode, the electric motor/generator works as a generator. The command of the generator speed is calculated based on the target cylinder velocity. Then the generator speed is controlled, and energy regeneration is realized.
3.3 Flow Chart of the Energy Management Strategy
The flow chart of the proposed energy management strategy is shown in Fig. 9.

Flow chart of the energy management strategy
4 Experiment and Analysis
4.1 Parameters of the Test Bench
To verify the energy saving of EHCVP II, a mini-test bench is built in laboratory. The size of hydraulic system and load are smaller than those of the real excavator. The efficiency maps of the engine and motor/generator are based on those described in [36]. In real engineering, the speed range of a real engine is about 800–4000 rpm. In the experiment, the engine range is reduced to 100–500 rpm. In real engineering, the engine cannot work below 500 rpm. Duo to the mini-test bench, the engine speed and efficiency map is scaled-down to be used in the calculation of energy management strategy and to verify the trend of the energy saving efficiency. The efficiency map of the engine and the electric motor are shown in Figs. 10 and 11.

Engine efficiency

Motor/generator efficiency
The speed range for the engine is selected based on the range of the velocity. For the real excavator, the velocity range of the boom cylinder is from 0.05 to 0.2 m/s. In this experiment, the above velocity range of a real excavator is selected to test the system. The torque range for the engine is selected based on the load of the test bench. For the test bench, the load is 160 times smaller than that of a 48-t hydraulic excavator. Furthermore, to ensure the working efficiency of the engine, the range of the speed and torque cannot be large excessively. Hence, the ranges of the speed and torque for the engine are selected to balance the requirements of the velocity and the load, and the working efficiency. Based on the mini-test bench, the engine speed and torque are scaled-down, and the efficiency map is shown in Fig. 10. If the proposed system uses in engineering, the engine should be selected based on the specific conditions of the real excavator.
In the experiment, the motor/generator 1 emulates the engine. The speed and torque of motor 1 are measured by the speed sensor and the torque sensor. Then the engine working points can be got. Based on the efficiency map and measured engine working points, the efficiency can be got in Fig. 10. Finally, the energy consumption of the engine can be calculated. Although the electric motor in the test bench is different form the real engine, the working points are the same, and the real engine efficiency map is used to calculate the energy consumption.
In the test bench, a variable hydraulic pump is installed, in which the displacement is form 15 to 30 mL/r. As mentioned in Chapter 3, the efficiency of hydraulic pump is also considered in the proposed energy management strategy. Hence, the volumetric efficiency and the hydro-mechanical efficiency of the hydraulic pump in the test bench are tested, and used for calculation in the proposed EMS. One map of the volumetric efficiency and the hydro-mechanical efficiency is shown in Fig. 12, in condition of 45 bar.

Efficiency of hydraulic pump at 45 bar
The capacity of the battery is important in hybrid hydraulic excavator. To avoid deep charge and discharge, and ensure the battery life, the working range of battery is set to 30–80% normally [32, 37]. The enough energy is also needed to drive the hydraulic excavator by electric motor. Based on the above analysis, a battery of 0.02 kWh is selected for the test bench. This selected capacity of battery can ensure that the battery provides energy for three cycles of running within the working range of battery.
In the real engineering, the excavator is much larger than the test bench. So, the capacity of battery should be deigned based on the real condition by using EHCVP II in real excavator. The parameters of the key components are listed in Table 1.
4.2 Experiment Results and Analysis
As discussion in chapter 1, the proposed system with the EHCVP II can improve the energy saving efficiency, especially in condition of a large velocity. Hence, one experiment was conducted to verify the energy saving efficiency, in which the velocity of cylinder is 0. 2 m/s. The load is 400 kg, and the battery is emulated in the Simulink software.
In the experiment, the speed and torque of the engine can be measured by the speed sensor and torque sensor. Based on the efficiency map of the engine in Fig. 10 and the tested speed and torque, the efficiency of each working point can be found out. Similarly, the working points of the motor/generator can be got, and the efficiency can be checked by efficiency map in Fig. 11. Then the energy consumption of engine and motor/generator can be calculated. Finally, the charge energy and discharge energy of the battery are calculated in the experiment.
The test bench is controlled through the Simulink Desktop Real-Time mode, in which the control pogrom is built. The signals of each sensor are measured by Ni PCI card, which is installed in industrial computer. One typical working cycle of boom cylinder is tested, and the experimental results are shown in Fig. 13.

Displacement of cylinder, speed and torque of engine and motor/generator, and SOC of battery for EHCVP II
The displacement of cylinder is shown in Fig. 13a. The system worked in boom up mode from 2.2 to 5.1 s. Both the engine and the motor/generator provided the energy to drive the system. The speed and torque of the engine and motor/generator are shown in Fig. 13b and c. In boom down mode, the cylinder moved down, and the motor/generator worked as a generator to regenerate the potential energy from 11 to 14.5 s with gear ratio 1:1.3. The battery provided the energy in boom up mode and stored the energy in boom down mode. Hence, the SOC of battery decreased in boom up mode, and increased in boom down mode in Fig. 13d.
As a comparison, the experiments of current EHCVP was conducted. Only one gear ratio 1:1 is used in experiment to emulate direct connection without gearbox. The experimental results are shown in Fig. 14.

Displacement of cylinder, speed and torque of engine and motor/generator, and SOC of battery for current EHCVP
The same working cycle was tested, and shown in Fig. 14a. As shown in Fig. 14b and c, both the engine and the motor/generator drove the hydraulic pump. The torques of engine were 71 Nm and 60 Nm in experimental results of Figs. 13c and 14c respectively. Hence, the engine working points of EHCVP II is different from those of current EHCVP, which are summarized in Figs. 16 and 17. In boom down mode, the motor/generator worked as a generator to regenerate the potential energy with gear ratio 1:1.
A conventional system without EHCVP and EHCVP II were also tested. The experimental results are shown in Fig. 15. In boom up mode, only the engine drove the hydraulic pump, and the speed and torque of engine were shown in Fig. 15b and c. The working points of the engine are different from those of the EHCVP and EHCVP II, because there was no electric motor/generator to provide the additional energy. In boom down mode, the cylinder moved down without energy regeneration.

Displacement of cylinder, speed and torque of engine for conventional system
The comparison of the speed and torque of the engine for the three systems are summarized in Fig. 16. In Fig. 16b, the engine speed of conventional system is much larger than those of the EHCVP and EHCVP II. Compared with the EHCVP, the speed of the engine is low and the torque of engine is large for the EHCVP II in Fig. 16b and c. Hence, the engine working points are located in the high efficiency range of the EHCVP II in Fig. 17. The battery provides lower power of EHCVP II than that of EHCVP. So, in Fig. 16a, the final SOC of battery for EHCVP II is higher than that of EHCVP.

SOC of battery, speed and torque of engine for conventional system, EHCVP II and EHCVP

Working points of engine
In boom up mode, the gear ratio and displacement of EHCVP II and EHCVP were controlled by the proposed energy management strategy, and the results are summarized in Table 2. The gear ratio and displacement of conventional system were fixed to 1:1 and 30 cc with only the engine in the powertrain.
The engine working points of conventional system, EHCVP and EHCVP II are shown in Fig. 17 with red color, blue color and green color. The engine working points of conventional system are located in large speed area, because the large velocity of cylinder is required. But the efficiency of engine is low. The engine efficiency of the EHCVP is higher than that of the conventional system as shown in Fig. 17. But the engine cannot work in the highest efficiency range. Even if the displacement of the hydraulic pump got the maximum value 30 mL/r, the engine torque cannot be increased to improve the engine efficiency further. The engine working points of EHCVP II are located in highest efficiency range, because the gearbox is used in system, and a smaller gear ratio 1:1.3 is selected to increase the engine torque as shown in Table 2. Finally, the engine efficiency of EHCVP II is the largest value.
Engine efficiency is the key points to decide the energy consumption of the system. But the other components also affect the energy consumption. Hence, the experimental energy consumption of total system is summarized in Table 3 to verify the energy saving efficiency of the proposed EHCVP II in a hydraulic excavator boom system.
In Table 3, Eeng denotes the energy consumption of engine. ΔEbat is the charge of battery form beginning to the end of the experiment, in which positive value means the energy in the battery is increased, and vice versa. Etot is the estimated the energy consumption of the total system, which is calculated by Eq. 14.
The energy saving efficiency is calculated by Eq. 15.
where, ŋsav is the energy saving efficiency, and Econ is the energy consumption of the conventional system. The results are summarized in Table 3. The energy saving efficiency of the EHCVP II is 54%, which is larger than that of the current EHCVP. Compared with current EHCVP, the energy saving efficiency of EHCVP II researches to 11% based on Eq. (15). Hence, compared with the conventional system and EHCVP, the proposed EHCVP II improves the energy saving efficiency effectively.
4.3 Discussion of Economic in Real Engineering
As shown in chapter 4.2, the energy saving of the proposed system is verified to save energy in a large velocity. However, the velocity range of the boom cylinder is varied in the real engineering. To show the advantage of the proposed system in real engineering, 3 cycles of experiments were conducted with different cylinder velocities. As a comparison, the conventional system with EHCVP, and the system without EHCVP were also tested. The experimental results are shown in Fig. 18.

Displacement, energy consumption and SOC of battery for proposed system with EHCVP II, conventional system without EHCVP, and conventional system with EHCVP
The displacements of cylinder for each system are shown in Fig. 18a. The velocities are 0.2 m/s, 0.15 m/s, and 0.05 m/s in each cycle respectively. The energy consumptions of engine for each system are shown in Fig. 18b. The comparison of SOC for battery is shown in Fig. 18c.
In the first cycle of boom up, the SOC of the EHCVP was lower than that of the EHCVP II, because the motor/generator provided more energy of EHCVP than that of EHCVP II. Hence, the engine provided more energy of the EHCVP II than that of the EHCVP. But the energy consumptions of the engine for the EHCVP II and EHCVP are similar in Fig. 18b. In summary, with the similar energy consumption of the engine, the output energy of the engine for the EHCVP II was larger than that of the EHCVP, because the working efficiency of the engine for EHCVP II was higher than that for the EHCVP, which was also discussed in the chapter 4.2. So, the energy of the battery is saved for the EHCVP II in this process. Based on the above discussion and the experimental results in chapter 4.2, the energy consumption was decreased with the proposed EHCVP II in a large velocity (0.2 m/s). Compared with the conventional system, the energy consumptions of the EHCVP II and the EHCVP were decreased obviously.
In the second cycle from 22 to 27 s, the energy consumption increased fast of EHCVP II and EHCVP, because the motor/generator charged the battery. In this condition, part of the energy from the engine is stored in the battery to keep the engine working with high efficiency. The energy saving efficiency of the EHCVP and EHCVP II were the same level in the condition of a middle velocity.
In the third cycle, the energy consumptions of the engine for EHCVP and EHCVP II were all zero, because the motor/generator drove the hydraulic pump independently. In this condition, the cylinder velocity was low so that the required power of the hydraulic pump was low. To avoid the low efficiency of the engine working points, the engine stopped working, and only the battery provided energy. Hence, the SOC of battery was decreased obviously from 44 to 56 s.
Finally, the energy consumptions of the engine for EHCVP II, EHCVP and conventional system are 43.07 kJ, 43.55 kJ and 90.06 kJ respectively. The SOC of the EHCVP II and the EHCVP are 0.55 and 0.53 respectively. The total energy consumption is calculated based on the Eq. (14) to convert the energy change of the battery to the total energy consumption. Then the total energy consumption for EHCVP II and EHCVP are 46.67 kJ and 48.59 kJ. Compared with the EHCVP, the EHCVP II saved 4% of the energy. Compared with the conventional system without EHCVP, the energy saving efficiency reached to 48%.
Taking a 48-t hydraulic excavator as an example, in which the hydraulic excavator works 10 h per day, and 250 days per year. The 48-t hydraulic excavator is 160 times larger than the test bench. Based on the saved energy of 80 s test in Fig. 16 and the energy of the diesel (38,410 kJ per liter), the saved energy can be converted into the fuel consumption of diesel. Compared with the EHCVP and conventional system without EHCVP, the EHCVP II can save 902 L and 20,733 L fuel per year respectively. Currently, the market of hydraulic excavator is large and increasing. For instance, the Chinese salves volume of hydraulic excavator researched 320 thousand in 2020 [31]. The application of EHCVP II on the hydraulic excavator can effectively reduce large amount of the fuel consumption.
5 Conclusion
To reduce the energy consumption and emission of the hydraulic excavator, a novel hybrid hydraulic excavator is proposed in this paper with the innovative EHCVP II and the energy regeneration system. An improved ECMS is proposed as the energy management strategy, in which the speed and torque of the engine are controlled in a high efficiency range. Based on the experimental results, the energy consumption can be reduced in boom up mode, and potential energy of boom can be regenerated in boom down mode. Compared with the conventional system and the current EHCVP, the EHCVP II and the improved ECMS can improve the working efficiency of the engine further.
The EHCVP II was proved to reduce the energy consumption in a large velocity. Compared with current EHCVP and conventional system without EHCVP, the energy saving efficiencies of EHCVP II are 11% and 54% respectively in condition of a large velocity, and one hydraulic excavator with EHCVP II can save 902 L and 20,733 L fuel respectively in 1 year. Hence, the EHCVP II can reduce the fuel consumption of hydraulic excavator effectively.
However, this research still has limitations, which are shown below:
-
1.
The energy saving efficiency was effectively improved with the EHCVP II in the condition of a large velocity. However, the proposed system cannot reduce the energy consumption obviously in the conditions of middle and low velocities.
-
2.
The energy saving efficiency of the proposed system is calculated based on the mini-test bench. In the real engineering, the energy loose of each part may different from the testbench, such as the gearbox and planetary gear. The efficiency of each part also decreases in long-time running. Hence, the energy saving efficiency may decrease in the application of the real engineering.
-
3.
For the ECMS, the design of the penalty factor consumed much time by the experiment. If the optimized penalty factor of ECMS can be used in the proposed system, the time for penalty factor design will be decreased, and the SOC of the battery may be controlled steadily. Furthermore, the efficiency of the system may increase.
References
Zhang, S. (2019). The effects of control methods on energy efficiency and position tracking of an electro-hydraulic excavator equipped with zonal hydraulics. Automation in Construction, 100, 129–144.
Chen, M., & Zhao, D. (2017). The gravitational potential energy regeneration system with closed-circuit of boom of hydraulic excavator. Mechanical Systems and Signal Processing, 82, 178–192. https://doi.org/10.1016/j.ymssp.2016.05.017.
Ding, R., Zhang, J., Xu, B., Cheng, M., & Pan, M. (2019). Energy efficiency improvement of heavy-load mobile hydraulic manipulator with electronically tunable operating modes. Energy Conversion and Management, 188, 447–461. https://doi.org/10.1016/j.enconman.2019.03.023.
Wang, Z., Jiao, X., Pu, Z., & Han, L. (2018). Energy recovery and reuse management for fuel-electric-hydraulic hybrid powertrain of a construction vehicle. IFAC-Papers Online, 51, 390–393. https://doi.org/10.1016/j.ifacol.2018.10.080.
Yang, J., Bian, Y., Yang, M., Shao, J., & Liang, A. (2021). Parameter Matching of Energy Regeneration System for Parallel Hydraulic Hybrid Loader. Energies, 14, 5014. https://doi.org/10.3390/en14165014.
Ge, L. (2019). Potential energy regeneration method and its engineering applications in large-scale excavators. Energy Conversion and Management, 195, 1309–1318.
Zhang, C., Wang, L., Li, H., & Wang, L. (2020). Experimental research on parameters of a late-model hydraulic-electromotor hybrid pumping unit. Mathematical Problems in Engineering, 2020, 2923154. https://doi.org/10.1155/2020/2923154.
Lin, T., Wang, Q., Hu, B., & Gong, W. (2010). Development of hybrid powered hydraulic construction machinery. Automation in Construction, 19, 11–19. https://doi.org/10.1016/j.autcon.2009.09.005.
Wang, D., Guan, C., Pan, S., Zhang, M., & Lin, X. (2009). Performance analysis of hydraulic excavator powertrain hybridization. Automation in Construction, 18, 249–257. https://doi.org/10.1016/j.autcon.2008.10.001.
Yu, Y.-X., & Ahn, K. K. (2020). Energy regeneration and reuse of excavator swing system with hydraulic accumulator. Int J of Precis Eng and Manuf-Green Tech, 7, 859–873. https://doi.org/10.1007/s40684-019-00157-7.
Ahn, K. K., Ho, T. H., & Dinh, Q. T. (2008). A study on energy saving potential of hydraulic control system using switching type closed loop constant pressure system. Proceedings of the JFPS International Symposium on Fluid Power, 2008, 317–322. https://doi.org/10.5739/isfp.2008.317.
Xia, L. (2018). Energy efficiency analysis of integrated drive and energy recuperation system for hydraulic excavator boom. Energy Conversion and Management, 156, 680–687.
Zhang, W., Wang, J., Du, S., Ma, H., Zhao, W., & Li, H. (2019). Energy management strategies for hybrid construction machinery: evolution, classification. Comparison and Future Trends. Energies, 12, 2024. https://doi.org/10.3390/en12102024.
Wang, T., & Wang, Q. (2014). Efficiency analysis and evaluation of energy-saving pressure-compensated circuit for hybrid hydraulic excavator. Automation in Construction, 47, 62–68. https://doi.org/10.1016/j.autcon.2014.07.012.
Wang, T., Wang, Q., & Lin, T. (2013). Improvement of boom control performance for hybrid hydraulic excavator with potential energy recovery. Automation in Construction, 30, 161–169. https://doi.org/10.1016/j.autcon.2012.11.034.
Minav, T. A., Virtanen, A., Laurila, L., & Pyrhönen, J. (2012). Storage of energy recovered from an industrial forklift. Automation in Construction, 22, 506–515. https://doi.org/10.1016/j.autcon.2011.11.010.
Yu, Y.-X., & Ahn, K. K. (2019). Optimization of energy regeneration of hybrid hydraulic excavator boom system. Energy Conversion and Management, 183, 26–34. https://doi.org/10.1016/j.enconman.2018.12.084.
Ranjan, P., Wrat, G., Bhola, M., Mishra, S. K., & Das, J. (2020). A novel approach for the energy recovery and position control of a hybrid hydraulic excavator. ISA Transactions, 99, 387–402. https://doi.org/10.1016/j.isatra.2019.08.066.
Yu, Y.-X., & Ahn, K. K. (2020). Improvement of energy regeneration for hydraulic excavator swing system. International Journal of Precision Engineering and Manufacturing-Green Technology, 7, 53–67. https://doi.org/10.1007/s40684-019-00165-7.
Hao, Y. (2018). Potential energy directly conversion and utilization methods used for heavy duty lifting machinery. Energy, 155, 241–255.
Huang, W., Zhang, X., Ge, L., & Quan, L. (2021). Dual source integrated driving for hydraulic excavator swing system. IEEE Access, 9, 120755–120764. https://doi.org/10.1109/ACCESS.2021.3108796.
Lin, T., Wang, Q., Hu, B., & Gong, W. (2010). Research on the energy regeneration systems for hybrid hydraulic excavators. Automation in Construction. https://doi.org/10.1016/j.autcon.2010.08.002.
Lin, T., Huang, W., Ren, H., Fu, S., & Liu, Q. (2016). New compound energy regeneration system and control strategy for hybrid hydraulic excavators. Automation in Construction, 68, 11–20. https://doi.org/10.1016/j.autcon.2016.03.016.
Chen, Q., Lin, T., Ren, H., & Fu, S. (2019). Novel potential energy regeneration systems for hybrid hydraulic excavators. Mathematics and Computers in Simulation, 163, 130–145. https://doi.org/10.1016/j.matcom.2019.02.017.
Ge, L. (2018). A novel hydraulic excavator boom driving system with high efficiency and potential energy regeneration capability. Energy Conversion and Management, 166, 308–317.
Ge, L. (2017). Efficiency improvement and evaluation of electric hydraulic excavator with speed and displacement variable pump. Energy Conversion and Management, 150, 62–71.
Paganelli, G., Delprat, S., Guerra, T. M., Rimaux, J., & Santin, J. J. (2002). Equivalent consumption minimization strategy for parallel hybrid powertrains. Vehicular technology conference. IEEE 55th Vehicular Technology Conference, 4, 2076–2081. https://doi.org/10.1109/VTC.2002.1002989.
Onori, S., Serrao, L., & Rizzoni, G. (2010). Adaptive equivalent consumption minimization strategy for hybrid electric vehicles. ASME 2010 dynamic systems and control conference (1st ed., pp. 499–505). Cambridge: ASMEDC. https://doi.org/10.1115/DSCC2010-4211.
Sun, C., Sun, F., & He, H. (2017). Investigating adaptive-ECMS with velocity forecast ability for hybrid electric vehicles. Applied Energy, 185, 1644–1653. https://doi.org/10.1016/j.apenergy.2016.02.026.
Tian, X., Cai, Y., Sun, X., Zhu, Z., & Xu, Y. (2019). An adaptive ECMS with driving style recognition for energy optimization of parallel hybrid electric buses. Energy, 189, 116151. https://doi.org/10.1016/j.energy.2019.116151.
Yu, Y., Do, T. C., Park, Y., & Ahn, K. K. (2021). Energy saving of hybrid hydraulic excavator with innovative powertrain. Energy Conversion and Management, 244, 114447. https://doi.org/10.1016/j.enconman.2021.114447.
Chen, Z., Mi, C. C., Xia, B., & You, C. (2014). Energy management of power-split plug-in hybrid electric vehicles based on simulated annealing and Pontryagin’s minimum principle. Journal of Power Sources, 272, 160–168. https://doi.org/10.1016/j.jpowsour.2014.08.057.
Syed, S. A., Lhomme, W., & Bouscayrol, A. (2011). Modeling of power split device with clutch for heavy-duty millitary vehicles. IEEE Vehicle Power and Propulsion Conference. https://doi.org/10.1109/VPPC.2011.6043134.
Zeng, X., Yang, N., Song, D., Zhang, C., Wang, J., Wang, J., et al. (2016). Multi-factor integrated parametric design of power-split hybrid electric bus. Journal of Cleaner Production, 115, 88–100. https://doi.org/10.1016/j.jclepro.2015.07.034.
Liu, J., & Peng, H. (2008). Modeling and control of a power-split hybrid vehicle. IEEE Transactions on Control Systems Technology, 16, 1242–1251. https://doi.org/10.1109/TCST.2008.919447.
Cai, Y., Ouyang, M. G., & Yang, F. (2017). Impact of power split configurations on fuel consumption and battery degradation in plug-in hybrid electric city buses. Applied Energy, 188, 257–269. https://doi.org/10.1016/j.apenergy.2016.11.126.
Chen, S.-Y., Wu, C.-H., Hung, Y.-H., & Chung, C.-T. (2018). Optimal strategies of energy management integrated with transmission control for a hybrid electric vehicle using dynamic particle swarm optimization. Energy, 160, 154–170. https://doi.org/10.1016/j.energy.2018.06.023.
Acknowledgements
This work was supported by Basic Science Research Program through the National Research Foundation of Korea (NRF) funded by the Ministry of Science and ICT, South Korean (NRF-2020R1A2B5B03001480 and by China Postdoctoral Science Foundation [2021M701477].
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of Interest
On behalf of all authors, the corresponding author states that there is no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Yu, Y., Do, T.C., Yin, B. et al. Improvement of Energy Saving for Hybrid Hydraulic Excavator with Novel Powertrain. Int. J. of Precis. Eng. and Manuf.-Green Tech. 10, 521–534 (2023). https://doi.org/10.1007/s40684-022-00437-9
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40684-022-00437-9