
Abstract
In this paper, torsional dynamics of nanotubes embedded in an elastic medium with arbitrary elastic boundary conditions is studied. The proposed mathematical model in this study developed based on the nonlocal elasticity theory gives us opportunity to include small-scale parameter. Two springs in torsional direction are attached to a nanotube at both boundaries. Angular rotation function based on the nonlocal elasticity theory is represented by a Fourier sine series. A coefficient matrix including torsional effects is obtained by using Stoke transformation and nonlocal boundary conditions. This coefficient matrix can be used to obtain the torsional vibration frequencies with restrained or rigid (fixed-free) boundary conditions. In order to validate the performance of the present analytical method, results calculated for rigid boundary cases (fixed-free) are presented for a comparison with those given in the literature, and the results agree with each other exactly. It is shown that nonlocal parameter, torsional spring coefficients and elastic medium have a notable impact on the torsional dynamics of carbon nanotubes.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Single-walled carbon nanotubes (SWCNTs) have attracted much attention due to their superior optical, mechanical, electrical and thermal properties and several applications in the development of micro- or nanoscale devices. Numerous studies into the mechanical, electric and physical properties of SWCNTs in engineering applications have been presented [1,2,3]. SWCNTs have different application fields as higher stiffness and stronger composite fibers, micro-mechanical high-frequency oscillators, good electronic elements, nanosized actuators and nanosized sensors [4,5,6,7,8]. Various methods for investigating the mechanical and dynamical characteristics of SWCNTs have been proposed along with experimental and theoretical studies.
Development of SWCNT-based machines requires a good understanding of their mechanical properties such as shear modulus, elasticity modulus (Young’s modulus), maximum compressive and tensile strengths, and Poisson’s ratio has been examined rigorously. Extensive experimental and theoretical studies have been conducted on their electronic and mechanical properties. On the other hand, experimentation with nanosized devices and nanoscale structures is both expensive and difficult. Research of appropriate atomic simulation, such as classical molecular dynamics and mathematical theories for SWCNTs, consequently, is essential.
Developing appropriate physics of nanoscale structures is parted into three categories: hybrid atomistic [9, 10], continuum [11, 12] and atomistic continuum mechanics [13, 14]. The classical continuum mechanics is not computationally expensive, and calculated mechanical properties are in good agreement with those of the other approaches.
Various elastic continuum theories such as modified couple stress theory [15, 16], nonlocal elasticity [17,18,19,20], couple stress theory of elasticity [21], strain gradient elasticity [22], surface elasticity [23] and nonlocal strain gradient elasticity that can capture small-sized effects have been used to study the electrical, mechanical and physical properties of nanosized components of structures. Yang et al. [16] have recently proposed a higher-order elasticity theory which known as modified couple stress theory. After this theory, the nonlocal strain gradient elasticity, strain gradient elasticity and the modified couple stress theories have been widely used to investigate the static, stability and dynamical analysis of small-sized structures [24,25,26,27,28,29,30,31,32,33,34,35,36,37,38,39,40,41,42,43,44,45,46,47,48,49,50,51,52,53,54,55,56,57,58,59,60,61,62,63,64,65,66,67,68,69,70].
Recently, numerous nanomachines have been developed which use SWCNTs as torsional components of structures [71]. Consequently, it is important to understand the mechanical properties of twisting SWCNTs such as the angular rotation and torsional frequencies for reliable design of torsional components.
In contrast to the rigid supports in which known as fixed–fixed and fixed-free supports which are used to describe the boundary conditions, the present analytical method possesses torsional elastic spring parameters for a better description of real boundary conditions. Idealized supporting conditions (clamped–clamped, clamped-free) are nothing but special cases of more complex boundary conditions involving elastic restraints located at the ends of a nanotube. For instance, a clamped–clamped nanotube is a special case of a nanotube with linear elastic springs of infinite stiffness which provide the torsional constraints. The main objective of present paper is to propose a general analytical method for the torsional vibration analysis of nanotubes with arbitrary elastic boundary conditions (restrained or rigid). It is planned to construct to a semi-continuum analytical model for torsional vibration analysis of SWCNTs, and the small-scale effects are also taken into account for direct comparisons. The angular rotation about the center of twist is represented by a Fourier sine series. A coefficient matrix is obtained by applying a mathematical procedure known as Stokes transformation to the nonlocal boundary conditions. The determinant of this coefficient matrix gives the torsional vibration frequencies for the SWCNTs with general elastic boundary conditions. The present model is expected to be very efficient in the design and analysis of SWCNTs, nanocones, nanobeams and nanobars under various boundary conditions (rigid or restrained). Free torsional frequencies presented herein should serve as references for torsional dynamic analysis of carbon nanotubes (CNTs) with any desired supporting conditions (elastic or rigid).
2 Background theory
2.1 Nonlocal elasticity theory
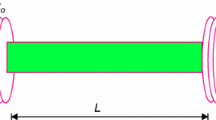
The dynamical properties of SWCNTs have been rigorously investigated based on nonlocal elasticity theory. Motivated by these ideas, SWCNTs can be taken as a rod of circular cross section with surrounding elastic matrix which is considered as a torsional springs, as shown in Fig. 1.

A single-walled carbon nanotube embedded in an elastic medium with torsional springs at both ends
For homogenous and isotropic elastic materials, the following relations are defined based on nonlocal elasticity theory [46]:
in which, \(\tau _{kl}(x')\) denotes the Cauchy stress tensor at any point \(x'\), \(\rho\) denotes the mass density of the body, \(u_{l}\) is the displacement vector, \(f_{l}\) is the applied force density, \(\epsilon _{kl}(x')\) is the strain tensor, \(\sigma _{kl}\) is the nonlocal stress tensor, V is the volume occupied by the body, t denotes the time, \(\mu\) and \(\lambda\) express Lame constants, A coordinate system is taken in the SWCNTs, where x is the longitudinal direction of carbon nanotube. \(\alpha \left| x-x'\right|\) denotes the distance form of Euclidean. \(\alpha \left| x\right|\) can be displayed by a differential operator, which can be shown as the following compact form [46]:
and the following equation can be deduced from equation (2):
Moreover, the following partial differential equation can be expressed by Eq. (1) as follows:
According to the Eringens’ nonlocal elasticity and considering the small-sized effect of nanomaterials, the linear differential operator is given by
in which a expresses internal characteristic length and \(e_0\) denotes a material constant for adjusting the nonlocal model in matching with experimental test results; this parameter is estimated the relations of the model could provide satisfied approximation of atomic lattice dynamics. The value of 0.39 is used by Eringen [19] for \(e_0\). A calibration of the small-scale parameter \(e_0\) has been made using MDS results at room-temperature conditions. \(\nabla ^2\) expresses the Laplacian. Then constitutive equation could be rewritten in terms of small-scale (nonlocal) parameter:
For nonlocal elasticity problems formulated in unbounded domains (elastic boundaries), Eringen differential law model can be considered equivalent to a strain-driven model, due to the tacit fulfillment of nonlocal boundary conditions of vanishing at infinity. So, Eringen differential law model is effectively exploited by Eringen to explored Rayleigh surface waves and screw dislocations. Utilizing equation (9), the equation of the motion in terms of the angular rotation function as follows [72]:
in which \(\Phi (x,t)\) expresses the angular rotation about the center of twist, \(k_t\) is the elastic medium coefficient, G expresses the shear modulus of elasticity and \(J_p\) denotes the polar moment of inertia and the shear modulus can be expressed as
In the above formula, \(\nu\) is the Poisson’s ratio, E is the Young’s modulus. Equation (10) is the partial differential equation for the free torsional vibration of single-walled carbon nanotube embedded in an elastic medium [72].
3 Free torsional vibration with general elastic boundary conditions
In this section, a restrained carbon nanotube embedded in an elastic medium (see Fig. 1) for a torsional vibration is studied based on Eringens’ nonlocal elasticity theory. The main idea of the proposed analytical method is to derive an eigenvalue problem including elastic medium parameter and the torsional spring coefficients. In addition, results of the classical boundary conditions (fixed-free), which have been existing extensively in the literature, are also presented for the comparison purpose.
3.1 Angular rotation function about the center of twist
Utilizing the separation of variables method, \(\Phi (x,t)\) in equation (10) can be written in the following form:
where \(\theta (x)\) expresses the rotation function about the center of twist and \(\omega\) expresses the angular frequency. By substituting Eq. (12) into Eq. (10) as
the rotation function \(\theta (x)\) can be written as
where
3.2 Stokes’ transformation
Because few detailed reports on the torsional vibration analysis of CNTs with elastic boundary conditions are available, in this study, a mathematical transformation known as “Stokes’ transformation” is applied to the nonlocal boundary conditions and the governing equation [56, 57]. Present mathematical model bridges the gap between deformable and the rigid supporting conditions, which is of great significance for the application of the nonlocal elasticity theory to CNTs. The coefficients (\(A_n\)) in equation (14) read as:
On the other hand, the first derivative of Eq. (14) with respect to x gives:
Utilizing the Fourier cosine series and Eq. (17), the following equation can be derived as:
Fourier constants (\(f_0\), \(f_n\)) in Eq. (18) read as:
by integrating parts of above equation, the following relations are obtained:
The present analytical approach (Stokes’ transformation to gather with Fourier series) will be useful when dealing with deformable boundary conditions [56, 57]. Similarly, the first two derivatives of angular rotation function \(\theta (x)\) can be calculated as:
Substituting Eqs. (14) and (24) into Eqs. (13) yields the following equation.
where,
By using the above equation, the rotation function \(\phi (x,t)\) can be written in terms of \(\theta _0\) and \(\theta _L\) as follows:
4 Nonlocal boundary conditions
4.1 General case
By using the relations for rigid boundary conditions in reference [53], the nonlocal boundary conditions for deformable boundary conditions can be written as:
in which, \(\phi _0\) and \(\phi _L\) are the torsional spring coefficients, and the following nondimensional parameters are defined as:
The following generalized eigenvalue problem is obtained by using Eqs. (23), (25), (28) and (29)
where
4.2 Without elastic medium
When the elastic medium parameter in Eqs. (35) and (36) is equal to zero, the systems of linear equations for without elastic medium case are written as
where
4.3 Torsional vibration analysis in classical elasticity theory
If both the nonlocal parameter \(e_0a\) and the elastic medium parameter \(K_t\) equal zero (\(e_0a=0\) and \(K_t=0\)), the systems of equations in (35) and (36) can be reduced to the classical torsional frequencies of prismatic bar theory (\(\omega _n=\frac{\pi n}{L} \sqrt{\frac{G}{\rho }}\)), (\(n =1,2,3,4, \ldots\)) where the index n indicates the mode number,
The torsional vibration model constructed here is valid for general elastic boundary conditions. From Eqs. (35) and (36), one yields:
where
To obtain a nontrivial solution of Eq. (45), the coefficient determinant of the matrix should be zero, or;
It is remarkable that if the nonlocal parameter in Eq. (50) is neglected, namely \(e_0a = 0\), then the torsional eigenvalue solution of carbon nanotube embedded in elastic medium based on the local (classical) elasticity theory is deduced. Assuming elastic medium parameter is neglected, the solution of present model is reduced to that of nonlocal elasticity theory without elastic matrix case. Furthermore, if the elastic medium and nonlocal parameter are all neglected, (i.e., \(K_t = 0\), \(e_0a = 0\)), the conventional torsional vibration eigenvalue problem can be obtained.
5 Results and discussion
The following subsections are devoted to study the effect of the torsional spring parameters, nonlocal parameter (\(e_0a\)), length of the carbon nanotube and the influence of elastic medium on the torsional frequencies of the carbon nanotube, with different elastic boundary conditions. During all numerical calculations, length of carbon nanotube is taken as 10 nm. It can be noted that the classical rigid boundary conditions are derived by setting the values of specific stiffness parameters of the elastic springs.
5.1 Model validation
To ensure about the exactness of the analytical computations and the convergence potentialities of the presented method (Stokes’ transformation), the calculated numerical results are compared with those of available studies in the literature. Because few detailed reports on the torsional vibration analysis of SWCNTs with deformable boundary conditions are available in the literature, an exact validation of the obtained results with existed results is difficult.
5.1.1 Clamped–clamped nanotube with surrounding elastic medium
The first validation gives a comparison between the present results with those calculated by Arda and Aydogdu [72] for a clamped–clamped nonlocal nanotube with surrounding elastic medium. Clamped–clamped supports are special case of a single-walled carbon nanotube with torsional springs of infinite stiffness. In order to obtain the solution of fixed–fixed supports, torsional spring parameters are taken as \(\delta _0 = 10\times 10^6\) and \(\delta _L = 10\times 10^6\). It should be pointed out that small-sized parameter (nonlocal parameter) \(e_0a\) must be smaller than 2 nm for SWCNTs [73]. Consequently, the small-sized parameter \(e_0a\) is selected in the range of 0–2 nm [74].
In Table 1, the comparative analysis of the first two nondimensional frequencies obtained by two methods is carried out. The numerical results have been presented for constant value of the elastic medium parameter (\(K_t=1.50\)) as well as different values of the nonlocal parameter (\(e_0a\)). As it is seen from Table 1, the predicted results of the proposed method (Stokes’ transformation) are in excellent agreement with those given in Ref. [72] by using Eq. (51):
5.1.2 Clamped-free nanotube with surrounding elastic medium
In the second validation, the clamped-free nanotube is considered. To obtain the results of clamped-free supports, torsional spring parameters are taken as \(\delta _0 = 10\times 10^6\) and \(\delta _L =0\). The numerical results have been derived for constant value of elastic medium parameter (\(K_t=5.00\)) as well as different values of the nonlocal parameter (\(e_0a\)). As it can be seen from Table 2, the obtained results agree very well with those given in Ref. [72] by using Eq. (52):
5.2 Numerical examples
In the following, a few numerical examples will be considered to highlight the effects of the torsional restraints, elastic medium and nonlocal parameter.
5.2.1 Effects of the nonlocal parameter
The effect of nonlocal parameter and length change on the dimensionless vibration frequencies is illustrated in Fig. 2a–d. The following relation is used to give a better illustration of the nonlocal effects in torsional vibration response of nanotubes,
in which \(\Gamma _k\) is introduced as the dimensionless frequencies. The index (NL) denotes the nonlocal elasticity theory (\(e_0a\ne 0\)) and (L) denotes the local elasticity (\(e_0a=0\)). This numerical example points out to the possibility of enhancing the torsional vibration frequencies of CNTs. It also shows the effectiveness of the presented approach to capture significance of the torsional spring coefficients, nonlocal effect, and elastic medium parameter on the dynamical response of CNTs. As observed in these figures, increasing nonlocal parameter causes lower vibration frequencies, or equivalently, the presence of small-sized effect induces a weaker carbon nanotube subject to vibration. One can observe from these figures that for increasing values of nonlocal parameter \(e_0a\), the torsional vibration frequencies decrease, especially for higher-order modes. This is because size effects are significant in small size and these higher-order effects are associated with the more dense arrangement of repulsive particles. Therefore, the classical elasticity theory underestimates the vibration response of a nanotube.

Effect of nonlocal parameter on the first six frequencies with \(K_t = 1.5\)
It is also seen from this example that the torsional vibration frequencies under an oscillation are not only dependent on the nonlocal parameter, the length of nanotube and the elastic medium parameter, but also dependent on the elastic torsional restraints at the ends. Thus, for the applications of SWCNTs, the study on the torsional vibration characteristics of nanotubes embedded in an elastic medium considering the supporting condition effect of nanosized materials is of special interest. Figure 3a–d shows the variation of the first four dimensionless frequencies (\(\Gamma _k=\Omega _k^{NL}/\Omega _k^{L}\)) versus the nonlocal parameter (\(e_0a\)) for various values of the torsional spring parameters. It is worthy to know that, in the presence of the lower values of symmetrical torsional spring parameters, the second, third and fourth nondimensional natural frequencies increase, as shown in Fig. 3b–d. As it can be observed from Fig. 3a, first mode exhibits a different behavior than the other modes for the lower values of symmetrical torsional spring parameters and the influence of the nonlocal parameter is less noticeable. This exception has been also well pointed out for lower values elastic spring parameters in the literature. The relationships between nonlocal parameter and second dimensionless frequencies (\(\Gamma _2=\Omega _2^{NL}/\Omega _2^{L}\)) and the rotational spring parameter under a constant elastic medium are demonstrated in Fig. 3b. The change in nonlocal parameter increases as \(\Gamma _2\) decreases for different elastic spring parameters which is in accordance with the literature. The ratio (\(\Gamma _k\)) indicated in Fig. 3c, d has the same trend as that in Fig. 3b. The effect on mode number on the vibration frequency of restrained carbon nanotube is illustrated in Fig. 4a–d. Fixing the elastic medium parameter \(K_t\) and varying the nonlocal parameter \(e_0a\) result in a significant change of the mode shapes. For the case in hand, changing the symmetrical spring parameters \(\delta _0=\delta _L\) from 1 to 10 results in an increase in the vibration frequencies of about 20 percent when \(e_0a=0\), as can be noted from Fig. 4a–d. This enhancement of the vibration frequencies is not observed for the presence of nonlocal parameter (\(e_0a\ne 0\)) as presented in Fig. 4a–d. The relationship between the torsional frequency parameter and the mode number appears to be linearly increasing at the zero value of the small-scale parameter, whereas it become gradually quadratic as the small-scale parameter increased further. According to these figures, the difference between nonlocal and classical frequencies decreases with increasing nonlocal parameter. Difference between nonlocal and classical theories increases with increasing value of mode number since higher-order modes are more affected from small wave length.

Effect of nonlocal parameter on the first six frequencies with \(K_t = 1.5\)

Effect of mode number for different nonlocal parameters on the vibration frequencies with \(K_t = 1.5\)
5.2.2 Effects of elastic medium
The frequency response curves of SWCNTs for several elastic spring parameters \(K_t\) and torsional spring constants are shown in Fig. 5. It is seen that the torsional frequencies of the nanotubes under consideration increase with the increase in elastic medium parameter. It is further seen that the influence of elastic medium becomes more pronounced when the spring constants change and the vibration frequencies increase. This parametric study points out to the possibility of enhancing the vibration frequencies of SWCNTs. It is also shown that the effectiveness of the proposed method captures the significance of the elastic medium effect on the dynamical behavior of CNTs.

Effect of elastic medium parameter on the vibration frequencies
5.2.3 Effects of asymmetrical springs
Finally, variation of torsional frequencies with mode number is shown for first six modes of vibration. Figure 6 shows the variation of the vibrational frequencies of a restrained nanotube for asymmetrical spring parameters. The results have been calculated for three different values of the elastic medium parameter (\(K_t=0\), \(K_t=5\), \(K_t=10\)) and three different values of the nonlocal parameter (\(e_0a=0.0\), \(e_0a=1.0\), \(e_0a=1.5\)) as well as three different combination of asymmetrical spring constants (\(\delta _0=2;\delta _L=10\), \(\delta _0=4;\delta _L=6\), \(\delta _0=5;\delta _L=15\)). The influence of the combined variation of the nonlocal parameter \(e_0a\), the elastic medium parameter \(K_t\) and the torsional springs at the ends on the torsional frequency of a restrained nanotube is considered. It can be seen that the effectiveness of the presented approach captures the significance of the nonlocal parameter and elastic medium effect on the dynamical behavior of restrained nanotubes. Further, it is shown that nonlocal parameter, torsional spring coefficients and elastic medium have a notable impact on the torsional dynamics of CNTs.

Influence of the different parameters
In the presented examples, the restrained SWCNTs are considered. Due to the outstanding electronical, dynamical and mechanical properties of CNTs, their usage in the different field of applications in nanoscience and nanotechnology has greatly increased. In this regard, CNTs with different boundary conditions have attracted substantial interest due to their suitability for a broad range of applications, such as nanoactuators, nanosensors and microelectronic devices; therefore, obtaining their torsional frequencies for different elastic boundary conditions is of particular interest using the presented approach. The present method does not need an admissible function that satisfies nonlocal boundary conditions. Stokes’ transformation is applied to get the relevant matrix. Stokes transformation with Fourier sine series is chosen for its freedom from supporting conditions when compared to other standard techniques.
6 Conclusions
Free torsional vibration analysis of restrained CNTs with a continuous elastic restraint is investigated by both the Fourier sine series and Stoke transformation. It is aimed to construct to a semi-continuum analytical method for torsional vibration analysis of retrained nanotubes. This new analytical method including elastic medium parameter is virtually different from all previous analytical and numerical methods where, instead of rigid supporting conditions (free-fixed), elastic constraints are used by considering the torsional spring coefficients. Such theoretical modeling has not been reported in previous studies. A coefficient matrix including torsional spring coefficients, nonlocal parameter and elastic medium is presented for the first time. The validity and accuracy of the present method, in obtaining the torsional vibration frequencies, have been examined by means of numerical example problems. The calculated results for the first two dimensionless torsional frequencies of the carbon nanotube by Fourier series to gather with Stokes transform have been compared with those of other works available in the literature, and a good agreement has been achieved. It is expected that this new analytical method will find a wide range of applications in more complex nanosystems with general elastic boundary conditions. The developed nonlocal elasticity model can also degenerate into classical elasticity theory if nonlocal parameter is set to be equal to zero.
Normalized frequencies of CNTs are calculated corresponding to various torsional spring coefficients, dimensionless nonlocal parameters and elastic medium coefficient. It is found that the value of nonlocal parameter plays more important role in the torsional vibrational response of SWCNTs with higher torsional spring parameters. Also, it is revealed that the difference between torsional frequencies calculated by classical and nonlocal elasticity theory is more significant for CNTs with higher values of nonlocal parameter.
References
Wang CY, Ru CQ, Mioduchowskil A (2003) Axially compressed buckling of pressured multiwall carbon nanotubes. Int J Solids Struct 40:38933911
Li HB, Wang X (2012) Effect of small scale on the dynamic characteristic of carbon nanotubes under axially oscillating loading. Physica E 46:198205
Bao WS, Meguid SA, Zhu ZH, Meguid MJ (2011) Modeling electrical conductivities of nanocomposites with aligned carbon nanotubes. Nanotechnology 22:485704
Tu ZC, Yang ZC (2002) Single walled and multiwalled carbon nanotubes viewed as elastic tubes with the effective Youngs moduli dependent on layer number. Phys Rev B 65:233407-1-4
Chang T, Gao H (2003) Size-dependent elastic properties of a single-walled carbon nanotube via a molecular mechanics model. J Mech Phys Solids 51:10591074
Li X, Bhushan B (2002) A review of nanoindentation continuous stiffness measurement technique and its applications. Mater Charact 48:1136
Wang X, Sun B, Yang HK (2006) Stability of multi-walled carbon nanotubes under combined bending and axial compression loading. Nanotechnology 17:815823
Cai H, Wang X (2006) Effects of initial stress on transverse wave propagation in carbon nanotubes based on Timoshenko laminated beam models. Nanotechnology 17:4553
Ball P (2001) Roll up for the revolution. Nature 414:142144
Baughman RH, Zakhidov AA, de Heer WA (2002) Carbon nanotubes the route toward applications. Science 297:787792
Aydogdu M (2009) Axial vibration of the nanorods with the nonlocal continuum rod model. Physica E 41:861864
Pradhan SC, Phadikar JK (2009) Small scale effect on vibration of embedded multilayered graphene sheets based on nonlocal continuum models. Phys Lett A 373:1062–1069
Bodily BH, Sun CT (2003) Structural and equivalent continuum properties of single-walled carbon nanotubes. Int J Mater Prod Technol 373:381397
Li C, Chou TW (2003) A structural mechanics approach for the analysis of carbon nanotubes. Int J Solids Struct Int J Mater Prod Technol 40:24872499
Li C, Chou TW (2003) Single-walled carbon nanotubes as ultrahigh frequency nanomechanical resonators. Phys Rev B 68:073405
Yang F, Chong ACM, Lam DC, Tong P (2002) Couple stress based strain gradient theory for elasticity. Int J Solids Struct 39:27312743
Eringen AC, Suhubi ES (1964) Nonlinear theory of simple micro-elastic solids-I. Int J Eng Sci 2:189–203
Eringen AC (1972) Nonlocal polar elastic continua. Int J Eng Sci 10:116
Eringen AC (1983) On differential equations of nonlocal elasticity and solutions of screw dislocation and surface waves. J Appl Phys 54:4703–4710
Toupin RA (1962) Elastic materials with couple-stresses. Arch Ration Mech Anal 11:385–414
Mindlin RD, Tiersten HF (1962) Effects of couple-stresses in linear elasticity. Arch Ration Mech Anal 11:415448
Aifantis EC (1999) Strain gradient interpretation of size effects. Int J Fract 95:1–4
Gurtin ME, Weissmuller J, Larche F (1998) The general theory of curved deformable interfaces in solids at equilibrium. Philos Mag 78:10931109
Arroyo M, Belytschko T (2005) Continuum mechanics modeling and simulation of carbon nanotubes. Meccanica 40(4–5):455–469
Wu DH, Chien WT, Chen CS, Chen HH (2006) Resonant frequency analysis of fixed-free single-walled carbon nanotube-based mass sensor. Sens Actuators A 126:117–121
Joshi AY, Harsha SP, Sharma SC (2010) Vibration signature analysis of single walled carbon nanotube based nanomechanical sensors. Physica E 42:2115–2123
Mehdipour I, Barari A, Domairry G (2012) Why the center-point of bridged carbon nanotube length is the most mass sensitive location for mass attachment? Comput Mater Sci 55:136–141
Wong EW, Sheehan PE, Lieber CM (1997) Nanobeam mechanics: elasticity, strength and toughness of nanorods and nanotubes. Science 277:1971–1975
Wan H, Delale F (2010) A structural mechanics approach for predicting the mechanical properties of carbon nanotubes. Meccanica 45(1):43–51
Poncharal P, Wang ZL, Ugarte D, Heer WAD (1999) Electrostatic deflections and electromechanical resonances of carbon nanotubes. Science 283:1513–1516
Chowdhury R, Adhikari S, Wang CW, Scarpa F (2010) A molecular mechanics approach for the vibration of single walled carbon nanotubes. Comput Mater Sci 48:730–735
Li CY, Chou TW (2003) A structural mechanics approach for the analysis of carbon nanotubes. Int J Solids Struct 40:2487–2499
Chowdhury R, Adhikari S, Mitchell J (2009) Vibrating carbon nanotube based bio-sensors. Physica E 42:104–109
Yayli MO (2011) Stability analysis of a gradient elastic beam using finite element method. Int J Phys Sci 6(12):2844–2851
Chen Y, Lee JD, Eskandarian A (2004) Atomistic viewpoint of the applicability of microcontinuum theories. Int J Solids Struct 41:2085–2097
Ma HM, Gao X-L, Reddy JN (2008) A microstructure-dependent Timoshenko beam model based on a modified couple stress theory. J Mech Phys Solids 56(12):3379–3391
Park SK, Gao X-L (2006) Bernoulli–Euler beam model based on a modified couple stress theory. J Micromech Microeng 16(11):2355–2359
Ramezani S, Naghdabadi R, Sohrabpour S (2009) Analysis of micropolar elastic beams. Eur J Mech A Solids 28(2):202–208
Wang Q, Liew KM (2007) Application of nonlocal continuum mechanics to static analysis of micro-and nano-structures. Phys Lett A 363:236–242
Wang Q (2005) Wave propagation in carbon nanotubes via nonlocal continuum mechanics. J Appl Phys 98:124301
Lu P, Lee HP, Lu C, Zhang PQ (2007) Application of nonlocal beam models for carbon nanotubes. Int J Solids Struct 44:5289–5300
Pradhan SC, Phadikar JK (2009) Bending, buckling and vibration analyses of nonhomogeneous nanotubes using GDQ and nonlocal elasticity theory. Struct Eng Mech 33:193–213
Khademolhosseini F, Rajapakse RKND, Nojeh A (2010) Torsional buckling of carbon nanotubes based on nonlocal elasticity shell models. Comput Mater Sci 48:736–742
Pradhan SC, Murmu T (2010) Buckling of single layer graphene sheet based on nonlocal elasticity and higher order shear deformation. Phys Lett A 373:4182–4188
Reddy JN, Pang SD (2008) Nonlocal continuum theories of beams for the analysis of carbon nanotubes. J Appl Phys 103:023511–023526
Eringen AC, Edelen DGB (1972) On nonlocal elasticity, Int J Eng Sci 10 233–248 Theory. Phys Lett A 373:4182–4188
Bower C, Rosen R, Jin L, Han J, Zhou O (1999) Deformation of carbon nanotubes in nanotube––polymer composites. Appl Phys Lett 74:3317–3319
Wagner HD, Lourie O, Feldman Y, Tenne R (1998) Stress-induced fragmentation of multiwall carbon nanotubes in a polymer matrix. Appl Phys Lett 72:188–190
Qian D, Dickey EC, Andrews R, Rantell T (2000) Load Transfer and deformation mechanisms in carbon nanotube-polystyrene composites. Appl Phys Lett 76:2868–2870
Schadler LS, Giannaris SC, Ajayan PM (1998) load transfer in carbon nanotube epoxy composites. Appl Phys Lett 73:3842–3844
Ru CQ (2001) Axially compressed buckling of a double-walled carbon nanotube embedded in an elastic medium. J Mech Phys Solids 49:1265–1279
Wang L, Ni Q, Li M, Qian Q (2008) The thermal effect on vibration and instability of carbon nanotubes conveying fluid. Physica E 40:3179–3182
Demir C, Civalek O (2013) Torsional and longitudinal frequency and wave response of microtubules based on the nonlocal continuum and nonlocal discrete models. Appl Math Model 37:93559367
Hsu JC, Lee HL, Chang WJ (2011) Longitudinal vibration of cracked nanobeams using nonlocal elasticity theory. Curr Appl Phys 11:1384–1388
Yayli MO, Aras M, Aksoy S (2014) An efficient analytical method for vibration analysis of a beam on elastic foundation with elastically restrained ends. Shock Vib Article ID 159213
Yayli MO (2016) A compact analytical method for vibration analysis of single-walled carbon nanotubes with restrained boundary conditions. J Vib Control 22:2542–2555
Yayli MO (2017) A compact analytical method for vibration of micro-sized beams with different boundary conditions. Mech Adv Mater Struct 24:496–508
Kiani K (2014) Nonlocal discrete and continuous modeling of free vibration of stocky ensembles of vertically aligned single-walled carbon nanotubes. Curr Appl Phys 14(8):1116–1139
Kiani K (2014) In-and out-of-plane dynamic flexural behaviors of two-dimensional ensembles of vertically aligned single-walled carbon nanotubes. Physica B Condens Matter 449:164–180
Kiani K (2014) Nanoparticle delivery via stocky single-walled carbon nanotubes: a nonlinear-nonlocal continuum-based scrutiny. Compos Struct 116:254–272
Kiani K (2014) Magnetically affected single-walled carbon nanotubes as nanosensors. Mech Res Commun 60:33–39
Kiani K (2015) Vibration analysis of two orthogonal slender single-walled carbon nanotubes with a new insight into continuum-based modeling of van der Waals forces. Compos Part B Eng 73:72–81
Kiani K (2016) Free vibration of in-plane-aligned membranes of single-walled carbon nanotubes in the presence of in-plane-unidirectional magnetic fields. J Vib Control 22(17):3736–3766
Kiani K (2015) Dynamic interactions of doubly orthogonal stocky single-walled carbon nanotubes. Compos Struct 125:144–158
Mirzaei M, Kiani Y (2016) Free vibration of functionally graded carbon-nanotube-reinforced composite plates with cutout. Beilstein J Nanotechnol 7:511–523
Mirzaei M, Kiani Y (2016) Nonlinear free vibration of temperature-dependent sandwich beams with carbon nanotube-reinforced face sheets. Acta Mechanica 227(7):1869–1884
Kiani Y (2016) Free vibration of functionally graded carbon nanotube reinforced composite plates integrated with piezoelectric layers. Comput Math Appl 72(9):2433–2449
Kiani Y (2017) Free vibration of FG-CNT reinforced composite spherical shell panels using Gram-Schmidt shape functions. Compos Struct 159:368–381
Kiani Y (2017) Thermal post-buckling of FG-CNT reinforced composite plates. Compos Struct 159:299–306
Kiani Y (2016) Shear buckling of FG-CNT reinforced composite plates using Chebyshev–Ritz method. Compos Part B Eng 105:176–187
Loya JA, Aranda-Ruiz J, Fernandez-Saez J (2014) Torsion of cracked nanorods using a nonlocal elasticity model. J Phys D Appl Phys 47(3):115304
Arda M, Aydogdu M (2014) Torsional statics and dynamics of nanotubes embedded in an elastic medium. Compos Struct 114:80–91
Wang Q, Wang C (2007) The constitutive relation and small scale parameter of nonlocal continuum mechanics for modelling carbon nanotubes. Nanotechnology 18:075702
Lim C, Zhang G, Reddy J (2015) A higher-order nonlocal elasticity and strain gradient theory and its applications in wave propagation. J Mech Phys Solids 78:298–313
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflicts of interest
The authors declare that they have no conflict of interest.
Additional information
Technical Editor: Wallace Moreira Bessa.
Rights and permissions
About this article

Cite this article
Yayli, M.Ö. On the torsional vibrations of restrained nanotubes embedded in an elastic medium. J Braz. Soc. Mech. Sci. Eng. 40, 419 (2018). https://doi.org/10.1007/s40430-018-1346-7
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s40430-018-1346-7