
Abstract
We propose an accurate and computationally efficient numerical technique for solving the biharmonic eigenvalue problem. The technique is based on the sinc-Galerkin approximation method to solve the clamped plate problem. Numerical experiments for plates with various aspect ratios are reported, and comparisons are made with other methods in literature. The calculated results accord well with those published earlier, which proves the accuracy and validity of the proposed method.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Eigenvalue problems such as plate vibration problems have attracted much research using a wide range of methods. However, exact solutions are available only for certain boundary conditions and domain configurations, hence approximate solutions are of great importance when analytical methods fail or become too cumbersome.
A large number of numerical methods have been developed to obtain solutions for many rectangular plate problems with different boundary conditions [23, 26, 29, 37–39]. A boundary homotopy method was used in [46] to obtain strict bounds for the N lowest eigenvalues of the clamped plate equation in the unit square. Some of these methods can only provide upper bounds for the eigenvalues. For example, spectral Legendre-Galerkin method [6] was used to provide highly accurate solution to the biharmonic eigenvalue problem for the clamped unit-square plate and buckling plate problems. Another method that always gives upper bounds for the eigenvalues is the Rayleigh-Ritz method [48]. Recently, Gavalas and El-Raheb [21] extended the method for eigenvalue problems with discontinuous boundary conditions applied to vibration of rectangular plates. Also, the method was applied in [8] for the vibration analysis of exponential functionally graded rectangular plates in thermal environment. On the other hand, the superposition method developed by Gorman [24] gives lower bound results to the same problem. This method has been successfully applied for the analysis of undamped out-of-plane vibrations of single isotropic plates [22]. Other successful numerical methods include the spline finite strip method by Fan and Cheung [19], the Galerkin approach by Chia [11] and Leipholz [27], the least squares technique [45], meshless methods [4, 13], and finite element methods [1, 10]. Differential quadrature (DQ) methods [2, 9] have been successfully applied in the vibration analysis. A generalized differential quadrature (GDQ) method was introduced by Shu and Richards [41] to simplify the calculation of the weighting coefficients of the derivatives approximation.
The biharmonic boundary value problem
subject to the nonhomogeneous boundary conditions
(where \(\frac{\partial {u }}{\partial n}\) is the outward normal derivative) was solved using the sinc-Galerkin method in [18]. In this paper, we apply the sinc-Galerkin method to solve the biharmonic eigenvalue problem
subject to the following boundary conditions for a clamped plate
In recent years, a lot of attention has been devoted to the study of the sinc method to investigate various scientific models. It is possible to solve two point boundary value problems [5, 34], initial-value problems [3], fourth-order differential equations [40], sixth-order boundary-value problems [17], nonlinear higher-order boundary-value problems [16], partial differential equations [32], eigenvalue problems, singular problem-like Poisson [47], linear Fredholm integro-differential equations [33], linear and nonlinear Volterra integro-differential equations [35], linear and nonlinear system of second-order boundary value problems [14], as well as Troesch’s problem [15] by using sinc methods. The comparison of finite difference, spectral and sinc-convolution treatments was considered in [12].
The outline of the paper is as follows. Section 2, contains notations, definitions and some results of sinc function theory. In Sect. 3, the sinc-Galerkin approach to the clamped plate eigenvalue problem is presented. In Sect. 4, we verify the reliability of the proposed algorithm by numerical results obtained and comparisons with published results in literature. Conclusions are given in Sect. 5.
2 Preliminaries and fundamentals
The books [31, 43] provide excellent overviews of methods based on sinc functions for solving ordinary and partial differential equations and integral equations. The goal of this section is to recall notations and definitions of the sinc function, state some known results, and derive useful formulas that are important for this paper.
The sinc function is defined on the whole real line by
For \(h>0\), the translated sinc functions with evenly spaced nodes are given as
If f is defined on the real line, then for \(h>0\) the series
is called the Whittaker cardinal expansion of f whenever this series converges. The properties of Whittaker cardinal expansions have been studied and are thoroughly surveyed in [43]. These properties are derived in the infinite strip \(D_d\) of the complex plane where for \(d>0\)
To construct approximations on the interval (a, b) which are used in this paper, we consider the conformal map [43]
The map \(\phi \) carries the eye-shaped region
onto the infinite strip \(D_d\).
The “mesh sizes” h represent the mesh sizes in \(D_d\) for the uniform grids \(\{kh\}\), \(k=0,\pm 1,\pm 2,\ldots \). The sinc grid points \(z_k\in (a,b)\) in \(D_E\) will be denoted by \(x_k\) because they are real, and are given by
The class of functions suitable for sinc interpolation and quadrature is denoted by B(D) and defined below.
Definition 2.1
[43] Let B(D) be the class of functions F that are analytic in D, satisfy
where
and on the boundary of D (denoted \(\partial D\)) satisfy
The following theorem provides the error bounds of sinc interpolation and quadrature formulae for functions in B(D).
Theorem 2.1
[43]Let \(\Gamma \) be (a, b). Let \(F\in B(D)\) and \(\tau _{j}=\psi (jh)=\phi ^{-1}(jh),\quad j=0,\pm 1,\pm 2,\ldots ,\). Let there exist positive constants \(\alpha \), \(\beta \) and C such that
then the error bound is
Making the selections
where [x] is the integer part of x, then
The sinc-Galerkin method requires that the derivatives of composite sinc functions be evaluated at the nodes. We need the following lemma.
Lemma 2.1
[31, 43] Let \(\phi \) be the conformal one-to-one mapping of the simply connected domain \(D_E\) onto \(D_d,\) given by (2.2). Then
3 The Sinc-Galerkin approach to the biharmonic eigenvalue problem
The equation of motion for the undamped free vibration of a plate may be written as [44]
where u is the transverse displacement at a point defined by the coordinates \((\bar{x},\bar{y})\in (0,a)\times (0,b)\) where a and b are the plate dimensions, at any given time t, D is the flexural rigidity of the plate and \(\rho \) is the mass of the plate per unit area of its surface.
For a plate of constant thickness \(\sigma \) and material properties E (Young’s modulus of elasticity) and \(\nu \) (Poisson’s ratio), the flexural rigidity D is given by
Assuming harmonic vibration, we may write
where \(U(\bar{x},\bar{y})\) is a shape function satisfying the fully clamped plate boundary conditions and describing the shape of the deflected middle surface of the vibrating plate, and \(\omega \) is a natural circular frequency of the plate. Substituting for u in Eq. (3.1), we obtain
For convenience, the governing Eq. (3.3) is expressed in dimensionless form. Define the dimensionless coordinates x and y, where \(x = \bar{x}/a\) and \(y = \bar{y}/b\). Equation (3.3) may be then written as
where \(\left( \Phi = b/a \right) \) is the plate aspect ratio, and the non-dimensional frequency parameter, \(\lambda \) of the plate may be expressed as
The assumed sinc approximate solution to the eigenvalue problem (3.4) takes the form:
where the basis functions \(\left\{ S_{ij}(x,y)\right\} \) for \(-M \le i,j \le N\) are given as simple product basis functions of one dimensional sinc basis
where \( \phi \) be as before.
The assumed approximate solution satisfies the clamped plate boundary conditions
where \(\Gamma \) is the boundary of the new dimensionless domain, \(\Omega \equiv (0,1)\times (0,1)\), and n is the outward normal to the boundary.
We use the Galerkin scheme to determine the unknown coefficients \(\left\{ U_{ij}\right\} \) in (3.6). First, we define the inner product of two functions f and g by
where \(w(x)=\frac{1}{[\phi _1'(x)]^2}\) and \( v(y)=\frac{1}{[\phi _2'(x)]^2}\) are the weight functions in the direction of the x-axis and y-axis, respectively.
The discrete Galerkin system is then given by
Instead of substituting the approximate solution given by (3.6) into (3.8), we first analyze the equation
The method of approximating the integrals in (3.9) begins by integrating by parts to transfer all derivatives from U to \(S_{kl}\). We are lead to the following theorem
Theorem 3.1
The following relations hold
and
for some functions \(\mu _j,\) \(\eta _j,\) \(\xi _p\) and \(\tau _r\) to be determined.
Proof
The proof is given in Appendix 1. \(\square \)
Replacing each term of (3.9) with the corresponding approximations defined in (3.10), (3.11), (3.12) and (3.13) and replacing \(U(x_k,y_l)\) by \( U_{kl}\) and dividing by \(h_x\,h_y\), we obtain the following theorem
Theorem 3.2
If the assumed approximate solution of the boundary-value problem (3.1) is (3.6), then the discrete sinc-Galerkin system for the determination of the unknown coefficients \(\left\{ U_{kl},\, k=-M,\ldots , N,\quad l=-M,\ldots , N \right\} \) is given by
Recall the notation of Toepleitz matrices [25]. Let \(I_{n}^{(P)}\), \(P=0,1,2,3,4\) be the \(n\times n\) matrices \(I^{(P)}\), with jk-th entry \(\delta _{jk}^{(P)}\) as given by equations (2.7)–(2.11). Further, \(D(g_x)\) is an \(n \times n\) diagonal matrix whose diagonal entries are \([g_{-M}, g_{-M+1}, \dots , g_{N}]^T\). Lastly, the \(n\times n\) matrix \(\mathbf U \) has kl-th entries given by \(U_{kl}\). Introducing this notation in Eq. (3.14) leads to the matrix form
where \(\mathbf A ,\, \mathbf B ,\,\mathbf C ,\,\mathbf E \) and \(\mathbf X \) are matrices of size \(n \times n \), and given by
and
The last step is to convert the matrix equation (3.15) to a matrix eigenvalue problem. This is done via vectorization of (3.15) using Kronecker matrix products [36]. This yields the algebraic eigenvalue problem
where
From the above equation, the values of \(\lambda \) defined in Eq. (3.5) can be obtained from the eigenvalues of matrix M.
4 Numerical results and discussions
For purposes of comparison, contrast and performance, we consider the computation of \(\lambda \) for the square plate and rectangular plates of various aspect ratios, \(\Phi \). For all cases, we have made the selections, \(d = \pi /2\), \(\alpha = 0.5\) and \(h = \pi /\sqrt{M}\).
-
Case 1 In this case, a clamped square plate is considered. In Table 1, we report the calculated values of \(\lambda _1, \lambda _2, \lambda _3\) and \(\lambda _4\) using different number of sinc basis functions with \(M = 5,\,10,\,15,\ldots ,50\).
It is worth noting that clamped plate eigenvalue problem has no exact solution. Hence, we further use the results obtained in Table 1 to find the limit values \(\left\{ \lambda ^{*}_1,\,\lambda ^{*}_2,\,\lambda ^{*}_3,\,\lambda ^{*}_4\right\} \) using the minimal polynomial extrapolation (MPE) approach [7, 42]. The obtained limit values are reported in Table 2 along with the strict lower bounds, \(\underline{\lambda }_j\) and upper bounds, \(\overline{\lambda }_j\) obtained in [46].
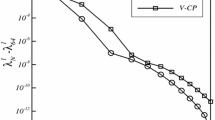
Since we are using the Galerkin scheme, we note from the results in Table 1 that our method converges to the accurate upper bound. We define an approximate relative error (ARE) by

Approximate relative error of the calculated \(\lambda _i,\; i = 1,\ldots ,4\)
The exponential convergence rate shown in Fig. 1 for the ARE of the first four frequency paramters verifies the validity and accuracy of the proposed scheme. The shapes of the corresponding eigenmodes are shown in Fig. 2.

Eigenmodes of the clamped square plate: a The first mode, \(\lambda _1 \simeq 35.985\). b The second mode, \(\lambda _2 \simeq 73.394\). c The third mode, \(\lambda _3 \simeq 73.394\). d The fourth mode, \(\lambda _4 \simeq 108.217\)
The results in Table 3 also show good agreement with those obtained by other methods; the Rayleigh–Ritz method with displacement components expressed in simple algebraic polynomial forms [8], the Rayleigh–Ritz method together with natural co-ordinate regions and normalized beam characteristic orthogonal polynomials [20], the Ritz method with 36 terms containing the products of beam functions [28], and Rayleigh–Ritz procedure for minimization of the energy function derived using Mindlin’s plate theory [30].
-
Case 2 In this case, we consider clamped rectangular plates with different aspect ratios \(\Phi = 2/3, 1.5\) and 2.5. The calculated values of \(\lambda _i,\,\, i = 1,\ldots ,4\) for \(\Phi = 2/3\) and 1.5 are reported in Tables 4 and 5, respectively.
The mode shapes for the rectangular plate with an aspect ration, \(\Phi = 1.5\) are shown in Fig. 3.

Mode shapes of clamped rectangular plate with \(\Phi =1.5 \): a The first mode, \(\lambda _1 \simeq 27.005\). b The second mode, \(\lambda _2 \simeq 41.704\). c The third mode, \(\lambda _3 \simeq 66.125\). d The fourth mode, \(\lambda _4 \simeq 66.527\)
In Table 6, the values of \(\lambda \) for the case of a clamped rectangular plate with \(\Phi = 2.5\) are reported. The calculated values of the first four frequency parameters for the cases of \(\Phi = 2/3, 1.5\) and 2.5 are listed in Table 7, compared with those obtained by other approaches in [8, 20, 28, 30].
Based on the limit values obtained using the MPE method, the approximate relative errors are defined for each case of \(\Phi = 2/3, 1.5\) and 2.5 by (4.1). The values of the AREs are listed in Table 8.
5 Conclusion
In this paper, the sinc-Galerkin method was applied to solve the biharmonic eigenvalue problem. Clamped thin square and rectangular plates with various aspect ratios were considered. The calculated results for these cases accord well with those published earlier. In addition, compared to the strict lower and upper bounds available for the square plate, the sinc-Galerkin has a high convergence rate. This proves the accuracy and validity of the sinc-Galerkin method.
References
Bardell, N.S., Dunsdon, J.M., Langley, R.S.: Free vibration of coplanar sandwich panels. Compos. Struct. 38, 463–475 (1997)
Bellman, R., Kashef, B.G., Casti, J.: Differential quadrature: a technique for the rapid solution of non-linear partial differential equations. J. Comput. Phys. 10, 40–52 (1972)
Bellomo, N., Ridolfi, L.: Solution of nonlinear initial -boundary value problems by sinc-collocation-interpolation methods. Comput. Math. Appl. 29, 15–28 (1995)
Belytschko, T., Lu, Y.Y., Gu, L.: Element-free Galerkin methods. Int. J. Numer. Methods Eng. 37, 229–256 (1994)
Bialecki, B.: Sinc-collocation methods for two-point boundary value problems. IMA J. Numer. Anal. 11, 357–375 (1991)
Bjørstad, P.E., Tjøstheim, B.P.: High precision solutions of two fourth order eigenvalue problems. Computing 63, 97–107 (1999)
Cabay, S., Jackson, L.W.: A polynomial extrapolation method for finding limits and antilimits of vector sequences. SIAM J. Numer. Anal. 13, 734–752 (1976)
Chakraverty, S., Pradhan, K.K.: Free vibration of exponential functionally graded rectangular plates in thermal environment with general boundary conditions. Aerosp. Sci. Technol. 36, 132–156 (2014)
Chen, W., Zhong, T.X.: A note on the DQ analysis of anisotropic plates. J. Sound Vib. 204, 180–182 (1997)
Cheung, Y.K., Chen, W.J.: Hybrid quadrilateral element based on Mindlin/Reissner plate theory. Comput. Struct. 32, 327–339 (1989)
Chia, C.Y.: Non-linear vibration of anisotropic rectangular plates with non-uniform edge constraints. J. Sound Vib. 101, 539–550 (1985)
Cook, T.: Comparison of finite difference, spectral and sinc biharmonic operators. M.sc thesis, University of Utah (2004)
Donning, B.M., Liu, W.K.: Meshless methods for shear-deformable beams and plates. Comput. Methods Appl. Mech. Eng. 152, 47–71 (1998)
El-Gamel, M.: Sinc-collocation method for solving linear and nonlinear system of second-order boundary value problems. Appl. Math. 3, 1627–1633 (2012)
El-Gamel, M.: Numerical solution of Troesch’s problem by sinc-collocation method. Appl. Math. 4, 707–712 (2013)
El-Gamel, M., Behiry, S., Hashish, H.: Numerical method for the solution of special nonlinear fourth-order boundary value problems. Appl. Math. Comp. 145, 717–734 (2003)
El-Gamel, M., Cannon, J.R., Zayed, A.: Sinc-galerkin method for solving linear sixth order boundary-value problems. Math. Comp. 73, 1325–1343 (2004)
El-Gamel, M., Mohsen, A., El-Mohsen, A.A.: Sinc-Galerkin method for solving biharmonic problems. Appl. Math. Comp. 247, 386–396 (2014)
Fan, S.C., Cheung, Y.K.: Flexural free vibrations of rectangular plates with complex support conditions. J. Sound Vib. 93, 81–94 (1984)
Geannakakes, G.N.: Natural frequencies of arbitrarily shaped plates using the Rayleigh–Ritz method together with natural co-ordinate regions and normalized characteristic polynomials. J. Sound Vib. 182, 441–478 (1995)
Gavalas, G., El-Raheb, M.: Extension of Rayleigh–Ritz method for eigenvalue problems with discontinuous boundary conditions applied to vibration of rectangular plates. J. Sound Vib. 333, 4007–4016 (2014)
Gorman, D.J.: Free Vibration Analysis of Rectangular Plates. Elsevier, New York (1982)
Gorman, D.J.: An exact analytical approach to the free vibration analysis of rectangular plates with mixed boundary conditions. J. Sound Vib. 93, 235–247 (1984)
Gorman, D.J., Yu, S.D.: A review of the superposition method for computing free vibration eigenvalues of elastic structures. Comput. Struct. 104, 27–37 (2012)
Grenander, V., Szego, G.: Toeplitz Forms and Their Applications, 2nd edn. Chelsea Publishing Co, Orlando (1985)
Keer, L.M., Stahl, B.: Eigenvalue problems of rectangular plates with mixed edge conditions. J. Appl. Mech. 39, 513–520 (1972)
Leipholz, H.H.E.: On some developments in direct methods of the calculus of variations. Appl. Mech. Rev. 40, 1379–1392 (1987)
Leissa, A.W.: The free vibration of rectangular plates. J. Sound Vib. 31, 257–293 (1973)
Liew, K.M., Hung, K.C., Lam, K.Y.: On the use of the substructure method for vibration analysis of rectangular plates with discontinuous boundary conditions. J. Sound Vib. 163, 451–462 (1993)
Liew, K.M., Xiang, Y., Kitipornchai, S.: Transverse vibration of thick rectangular plates-I. compressive sets of boundary conditions. Comput. Struct. 49, 1–29 (1993)
Lund, J., Bowers, K.: Sinc Methods for Quadrature and Differential Equations. SIAM, Philadelphia (1992)
McArthur, K., Bowers, K., Lund, J.: The sinc method in multiple space dimensions: model problems. Numer. Math. 56, 789–816 (1990)
Mohsen, A., El-Gamel, M.: A sinc-collocation method for the linear Fredholm integro-differential equations. Z. Angew. Math. Phys. 58, 380–390 (2007)
Mohsen, A., El-Gamel, M.: On the Galerkin and collocation methods for two-point boundary value problems using sinc bases. Comput. Math. Appl. 56, 930–941 (2008)
Mohsen, A., El-Gamel, M.: On the numerical solution of linear and nonlinear Volterra integral and integro-differential equations. Appl. Math. Comput. 217, 3330–3337 (2010)
Neudecker, H.: A note on Kronecker matrix products and matrix equation systems. SIAM J. Appl. Math. 17, 603–606 (1969)
Nowacki, W.: Free vibrations and buckling of a rectangular plate with discontinuous boundary conditions. Bull. Acad. Pol. Sci. Biol. 3, 159–167 (1955)
Ota, T., Hamada, M.: Fundamental frequencies of simply supported but partially clamped square plates. Bull. Jpn. Soc. Mech. Eng. 6, 397–403 (1963)
Piskunov, V.H.: Determination of the frequencies of the natural oscillations of rectangular plates with mixed boundary conditions. Prikl. Mekh. 10, 72–76 (1964). (in Ukrainian)
Ralph, C., Bowers, K.: The sinc-Galerkin method for fourth-order differential equations. SIAM J. Numer. Anal. 28, 760–788 (1991)
Shu, C., Richards, B.E.: Application of generalized differential quadrature to solve twodimensional incompressible Navier-Stokes equations. Int. J. Numer. Methods Fluids 15, 791–798 (1992)
Sidi, Avram: Efficient implementation of minimal polynomial and reduced rank extrapolation methods. J. Comput. Appl. Math. 36, 305–337 (1991)
Stenger, F.: Numerical Methods Based on Sinc and Analytic Functions. Springer, New York (1993)
Timoshenko, S., Woinowsky-Krieger, S.: Theory of Plates and Shells. McGraw-hill, New York (1959)
Žitňan, P.: Vibration analysis of membranes and plates by a discrete least squares technique. J. Sound Vib. 4, 595–605 (1996)
Wieners, C.: Bounds for the N lowest eigenvalues of fourth-order boundary value problems. Computing 59, 29–41 (1997)
Yin, G.: Sinc-collocation method with orthogonalization for singular problem-like Poisson. Math. Comput. 62, 21–40 (1994)
Young, D.: Vibration of rectangular plates by the Ritz method. Trans. Am. Soc. Mech. Eng. J. Appl. Mech. 17, 448–453 (1950)
Acknowledgments
The authors would like to thank the anonymous reviewer for carefully reading this paper and for his many useful suggestions.
Author information
Authors and Affiliations
Corresponding author
Appendix 1: Proof of Theorem 3.1
Appendix 1: Proof of Theorem 3.1
For \(U_{xxxx}\), the inner product with sinc basis element is given by
Integrating by parts to remove the fourth order derivatives from the dependent variable U leads to the equality.
where the boundary term is
The boundary terms in Eq. (5.1) vanished. Continuing only with the remaining integral in (5.1) and expanding the derivative results in
where \(S_k^{(i)}\) denotes the ith derivative of \(S_k\) with respect to the \(\phi _1\) and
and
Applying the sinc quadrature in the x-domain and y-domain to Eq. (5.2) yields Eq. (3.10).
The inner product for \(U_{yyyy}\) may be handled in a similar manner. This gives the expression (3.11) where
and
For \(U_{xxyy}\), the inner product with sinc basis element is given by
Integrating by parts to remove the fourth derivatives from the dependent variable U leads to the equality
where the boundary term is
Continuing with the remaining integral in (5.3) and expanding the derivative result in
where
and
Applying the sinc quadrature in the x-domain and y-domain to the Eq. (5.4) yields Eq. (3.12).
For \(\Phi ^{4} \lambda ^2 U(x,y)\), the inner product is
Applying the sinc quadrature to (5.5) yields
as given in Eq. (3.13).
Rights and permissions
About this article

Cite this article
El-Gamel, M., Mohsen, A. & Abdrabou, A. Sinc-Galerkin solution to the clamped plate eigenvalue problem. SeMA 74, 165–180 (2017). https://doi.org/10.1007/s40324-016-0086-9
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40324-016-0086-9