
Abstract
Spatial pattern formation via Turing instability in the reaction–diffusion system associated with the replicator dynamics is concerned with the long-term effects of perturbations, whereas the notion of reactivity describes the transient behaviour of perturbations to an asymptotically stable equilibrium point. This article establishes the connection between these two concepts—Turing instability and reactivity—in the context of the reaction–diffusion system associated with game replicator dynamics. In particular, we show that for Turing instability to occur in the reaction–diffusion system, the smallest diffusion coefficient of the system must be strictly less than the ratio of positive reactivity of the stable equilibrium point and square of wavenumber. This connection is also explored in terms of elements of the symmetric part of the associated stability matrix.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Mathematical game theory was initially developed as a tool to tackle the social and economic problems in which there is strategic interaction among rational players. Evolutionary game theory originated as its application to study population games in biology. Evolutionary game theory studies the behaviour of large populations in which players engage in repeated strategic interactions. The first major contributions in population game are by Maynard Smith and collaborators; see Smith and Price (1973), Smith (1974), Smith (1982). Evolutionary game theory has found many applications also in social science and economics; see, e.g., Hofbauer et al. (1998), Weibull (1997), Novozhilov et al. (2012), Roca et al. (2009), Nanda and Durrett (2017), Park and Gokhale (2019), and the references therein.
In evolutionary game theory, we consider an infinitely large population in which individuals take part in pairwise symmetric contests. Each individual has finitely many (say r) pure strategies, labelled \(1, 2, \dots , r\). If an individual plays strategy i against another who plays strategy j, then the pay-off to the individual playing strategy i is \(a_{ij}\), giving rise to the \(r \times r\) pay-off matrix \(A=(a_{ij})\). The state of the population at time t is described by the probability vector \(p(t) = (p_{1}(t), p_{2}(t), \dots , p_{r}(t))^{T}\), where \(p_{i}(t)\) is the proportion of individuals playing strategy i. In this context, Smith and Price (1973) introduced the concept of ESS which is widely used to study the evolution of animals conflicts. A population state p is said to be an ESS; if all the members of the population adopt it, then no mutant strategy could invade the population. However, the theory of ESS does not tell us how it is achieved or how quickly mutants are defeated. Later, a dynamical approach for the analysis of population games, using replicator dynamics, was offered by Taylor and Jonker (1978), which allows the investigation of the time evolution of population states p(t). However, due to the migration of species, which involve spatial as well as temporal variations, replicator dynamics is not sufficient to incorporate spatial variations.
Vickers (1989) introduced the reaction–diffusion model, in which \(p_{i}(t)\) is replaced by \(n_{i}(x,t)\), the number density of i-strategists at time t at position x. Later, Cressman and Vickers (1997) also presented a model with slight modification (see Sect. 2). Both these works analyzed the stability of equilibrium points of their respective reaction–diffusion models. Spatially homogeneous equilibrium points which are stable in the absence of diffusion, but become unstable upon addition of diffusion, can give rise to a special kind of instability named diffusion-driven instability or Turing instability (see Turing 1952). Vickers (1989), Cressman and Vickers (1997), and Vickers et al. (1993) derived some results on Turing instability, in terms of elements of the Jacobian matrix B (see Sect. 2) when each player have four or less strategies.
Spatial pattern formation via diffusion-driven instability (i.e., Turing instability) wherein an equilibrium of the reaction–diffusion system is asymptotically stable in the absence of dispersal but unstable in the presence of dispersal, plays an important role in biology, physics, and chemistry. Now, the question arises: does each asymptotically stable equilibrium point in the absence of diffusion can become unstable in the presence of diffusion \(\text{? }\) The answer to this question is ‘no’. It was found that some perturbations to asymptotically stable equilibrium point in the absence of diffusion grow initially and growth can continue for some time; on the other hand, some perturbations decrease monotonically (see, e.g., Neubert and Caswell 1997). Neubert and Caswell call such asymptotically stable equilibrium point for which perturbations initially grow before decaying, as reactive, and it was found that reactive equilibrium point can only become unstable in the presence of diffusion. In this regard, the concept of reactivity was introduced by Neubert and Caswell (1997) and defined as the maximum amplification rate, over all initial perturbations to an asymptotically stable equilibrium point. Specifically, reactivity describes the short-term transient behaviour of perturbations to an asymptotically stable equilibrium point. Neubert and Caswell (1997) also found that reactivity of the asymptotically stable equilibrium point is the largest eigenvalue of the symmetric part \(Hr(B)=\dfrac{(B+B^{T})}{2}\) of the associated Jacobian matrix B (see Sect. 2). Later, Neubert et al. (2002) establishes that positive reactivity of an asymptotically stable equilibrium point is necessary for the occurrence of Turing instability in the reaction–diffusion system under consideration.
The main objective of this paper is to explore the connection between Turing instability and reactivity, in the reaction–diffusion system (see (7) in Sect. 2) associated with the game replicator dynamics. Since reactivity is the largest eigenvalue of the symmetric matrix Hr(B) and positive reactivity is necessary for Turing instability, it motivates us to find more explicit conditions for Turing instability in terms of the diffusion coefficients, reactivity, and elements of the symmetric matrix Hr(B). In this connection, we derive a theorem giving the necessary condition for Turing instability in terms of reactivity and diffusion coefficients (see Sect. 3). Furthermore, we also derive some results for Turing instability when \(r=3,~4\) in terms of diffusion coefficients and elements of the matrix Hr(B) (see Sect. 4).
The rest of this paper is organized as follows. In Sect. 2, we recall some basic results regarding the stability of matrices and replicator dynamics. Subsequently, we introduce the reaction–diffusion system associated with the spatial games and describe the concept of Turing instability in this system. The definition and some properties of the stable equilibrium points are given at the end of Sect. 2. In Sect. 3, we derive necessary condition for Turing instability in terms of reactivity and diffusion coefficients of the reaction–diffusion systems (7). Section 4 contains results on Turing instability in terms of the diffusion coefficients and elements of the symmetric matrix Hr(B), when \(r=3,~4\). We end the paper with concluding remarks in Sect. 5.
2 Preliminaries
In this section, we outline some basic results regarding the stability of matrices, the analysis of Turing instability, and the concept of reactivity in the reaction–diffusion system associated with replicator dynamics.
2.1 Stability of matrices and the Routh–Hurwitz criterion
We begin with the definition of stable and negative definite matrices.
Definition 1
(Qian and Murray 2001) A \(r\times r\) real matrix, B, is said to be:
-
(i)
stable if all its eigenvalues have negative real parts, and
-
(ii)
negative definite if the quadratic form \(y^{T}By<0, ~\forall y (\ne 0) \in {\mathbb {R}}^{r}\).
Remark 1
Negative definiteness implies stability, but the converse is not true.
For a fixed diagonal matrix D with nonnegative entries and a real parameter k, let \( B(k) = B - k^{2}D \). The next lemma relates the negative definiteness of B with that of B(k).
Lemma 1
(Qian and Murray 2001) If B is negative definite, then the matrix B(k) is also negative definite.
To state the Routh–Hurwitz criterion for the stability of B, consider its characteristic equation
where the coefficients \(a_{i},\) \( i = 0, 1, {\dots }, r\) are all real.
The Routh–Hurwitz matrix corresponding to B is
Proposition 1
(Stability criterion of Routh–Hurwitz) (Gantmakher 1998; Murray 2007) The roots of characteristic equation (1) have negative real parts (or equivalently, B is stable) iff all the principal diagonal minors \(\Delta _{1}\), \(\Delta _{2}\), ..., \(\Delta _{r}\) of the matrix H (Routh–Hurwitz matrix) are positive, provided that \(a_{r} >0\) and \(a_{0}=1\).
Remark 2
By the definition of Routh–Hurwitz matrix H, it follows that \( \Delta _{r} = a_{r}\Delta _{r-1} \). Now, using this, we can rewrite the above proposition as follows: “the matrix B is stable iff all coefficients of characteristics equation (1) are positive”.
2.2 Reaction–diffusion system associated with the replicator dynamics and Turing instability
In this subsection, we first introduce replicator dynamics and evolutionarily stable states, followed by the associated reaction–diffusion system and its Turing instability.
Replicator dynamics
Generally, an evolutionary process consists of two basic elements: a mutation mechanism that provides variety and a selection mechanism that provides choice among currently available strategies. While the criterion of evolutionary stability highlights the role of mutations, the replicator dynamics highlights the role of selection. The term replicator dynamics has been introduced by Schuster and Sigmund (1983). Replicators are entities that can get copied. The probability of being copied may depend on the performance and environment of the replicator, and a copy of the replicator is an identical replicator that may again get copied.
Consider a large population of individuals who are programmed to play pure strategies \( i \in K = \lbrace 1, 2, \dots , r\rbrace \) in a symmetric two-player game with mixed strategy simplex \(\Delta \) and pay-off function \(u(p, q)= p^{T}Aq\), where \(A_{r\times r}\) is the pay-off matrix. At any time t, let \(x_{i}(t)\) be the number of individuals who are playing the pure strategy \( i \in K \), and let \( X(t)= \sum \nolimits _{i \in K} x_{i}(t)\) be the total population size. The associated population state is defined as the column vector \( p(t)= (p_{1}(t), p_{2}(t), \dots , p_{r}(t))^{T}\), where \(p_{i}(t) = \frac{x_{i}(t)}{X(t)}\) is the population share programmed to the pure strategy i at time t. Then, the replicator dynamics for the evolution of population state p(t) is
Here, \(u(e_{i}, p )\) and u(p, p) are average pay-offs to pure strategy i at a random match and population average pay-off, respectively, when population is in state p. Therefore, pure strategies that perform better than average grow, while those performing worse than average decline.
We now recall the definition of an ESS (Evolutionarily Stable State) (see Smith and Price 1973; Smith 1974; Weibull 1997; Cressman and Vickers 1997; Hofbauer et al. 1998).
Definition 2
A population state \(p \in \Delta \) is said to be an ESS if for every state \(q \ne p\), there exists \(\bar{\epsilon } \in (0, 1)\), such that
Remark 3
Note that p being an ESS is equivalent to the following set of conditions:
Recall that we have a population in which there are random pairwise contests between the players, each player has r strategies, and \(A=(a_{ij})_{r \times r}\) is the pay-off matrix where \(a_{ij}\) is the pay-off to an individual who plays strategy i against the opponent playing strategy j. In this context, we can rewrite the replicator dynamics as
For this system (2), we can find equilibrium points and investigate their stability. An ESS of the pay-off matrix A is always an equilibrium point of system (2) (see Weibull 1997). In replicator dynamics, spatial effects are ignored, but we know that the concept of ESS involves the consideration of migrating groups (or invaders or mutants) that produce a spatial variation. This motivates one to incorporate the dispersal or diffusion effects in system (2). We take the dispersal rate for each strategy to be fixed, but may vary between strategies. When dispersal rates are independent of strategies, the replicator model may be modified to the following spatial model:
where \(p_{i}=p_{i}(x,t)\), \(x \in \Omega \) (\(\Omega \subset {\mathbb {R}}^{l}\)) is the position vector, d is the common diffusion coefficient and \(\bigtriangledown ^{2}\) is the Laplace operator. Throughout this paper, we take one-dimensional space where \(\bigtriangledown ^{2} = \frac{\partial ^{2}}{\partial x^{2}}\). This spatial model cannot be immediately generalized to allow different dispersion rates for different strategies. The difficulty lies in the fact that p represents the frequencies rather than the numbers and dispersal usually depends upon the variation in the numbers.
Therefore, we consider the following two models in which growth rate depends upon how well individuals perform relative to the average pay-off or the common background fitness. The first model introduced by Vickers (1989) and is given as
where
In this system of reaction–diffusion equations, \(n_{i}(x,t)\) is the number density of i-strategists at position x and N(x, t) is the total number density, at time t. The constant \(d_{i}\) is the dispersal rate for i-strategists. The system (3) is assumed to hold in the region \( \Omega \times [0,\infty )\) (where \( \Omega \subset {\mathbb {R}}\)) with zero Neumann boundary conditions being imposed on \(\partial \Omega \). It is also clear that
and after integrating this on \( \Omega \), it follows that \(\int N \mathrm{d}x\) is a constant (carrying capacity, independent of t).
In the second model, an individual’s fitness comprises its pay-off in a random contest along with a common background fitness function, F(N), to all strategies. This function controls the growth rate of all strategists present in the population. Generally, F(N) is taken as a decreasing function of the density N (see Cressman and Vickers 1997). The model is given as
The dynamics of p is given by (2) and associated density dynamics becomes
Note that the equilibrium point of the system (4) is \(n^{*}=N^{*}p^{*}\), where \(p^{*}\) and \(N^{*}\) are the equilibrium points of (2) and (5), respectively. In the case of interior ESS of the matrix A, p evolve to \(p^{*}\) and N evolve to \(N^{*}\). For typical F(N), we expect a unique positive equilibrium density \(N^{*}\).
Remark 4
If all \(n_{i}\) are independent of x, then the reaction–diffusion system (3) reduces to
and hence, N is constant. Consequently, (6) becomes equivalent to (2) by taking \(p_{i}=\frac{n_{i}}{N}\). Thus, spatially constant equilibrium point \(n^{*}\) of (3) and \(p^{*}\) of (2) are related by \(n^{*}=N^{*}p^{*}\).
We now recall the definitions of stable and unstable equilibrium points of the reaction–diffusion system (3) or (4).
Definition 3
(Vickers et al. 1993) A homogeneous (that is, spatially constant) equilibrium point \( n^{*}\) of (3) (or (4)) is said to be:
-
(i)
temporally stable if it is asymptotically stable for spatially homogeneous perturbations of the reaction system (3) (or (4)) with \(d_{i}=0\), \(1 \le i \le r\).
-
(ii)
spatially stable equilibrium point with a particular set of \(d_{i}\) if it is asymptotically stable for spatially heterogeneous perturbations.
-
(iii)
uniformly spatially stable if it is asymptotically stable for spatially heterogeneous perturbations, for all \(d_{i} \ge 0\).
Definition 4
(Turing instability) (Turing 1952; Vickers et al. 1993)
The reaction–diffusion system (3) or (4) is said to exhibit Turing instability (diffusion-driven instability) if there is a homogeneous steady-state \(n^{*}\) asymptotically stable to small perturbations in the absence of diffusion, but unstable to small spatial perturbations when diffusion is present.
The interplay between diffusion and nonlinear reaction kinetics gives rise to spatially inhomogeneous patterns. It has been proved by Vickers (1989) that if \(p^{*}\) is an interior ESS of the pay-off matrix A, then the corresponding \(n^{*}\) is uniformly spatially stable for system (3) and hence no Turing instability. In this regard, Cressman and Vickers (1997) also shown that ESS can also become unstable under dynamics (4) and results in spatial patterns. This motivates us to study general necessary conditions for Turing instability when \(r \ge 2\). To this end, we note that the reaction–diffusion systems (3) or (4) can be expressed as
where the terms \(f_{i}(n)\), \(i=1, 2, \dots , r\), represent the reaction part of system (3) or (4), that is \(f_{i}(n)=n_{i} \left[ \dfrac{(An)_{i}}{N}-\dfrac{n^{T}An}{N^{2}}\right] \) for system (3), and \(f_{i}(n)=n_{i} \left[ \dfrac{(An)_{i}}{N}+F(N)\right] \) for system (4).
For the equilibrium point \(p^{*}\) of (2), let \(n^{*} = N^{*}p^{*}\) be the spatially constant equilibrium point of system (7) under consideration. We take the perturbation in \(n^{*}\) of the form \(\exp (\lambda t +\iota kx)\) (or \(\exp (\lambda t )\cos (kx)\)) in infinite (or in finite) domain and thus
where \(\lambda \in {\mathbb {R}}\), \( k \in {\mathbb {R}} \) is the wavenumber, and \(y \in {\mathbb {R}}^{r} \) (see Vickers 1989).
Then, by linear analysis of (7) about the stable spatially constant equilibrium point, \(n^{*}\) yields the linear system
The condition for non-trivial solution to this linear system is
Let \( B = \left[ \dfrac{\partial f_{i}}{\partial n_{j}}\right] _{n^{*}}\) be the Jacobian matrix for (7) without diffusion, and \(B(k)= B-k^{2}D\) be the Jacobian matrix for (7), where \( D = {\text {diag}}(d_{1}, d_{2}, \dots , d_{r})\). Note that after taking partial derivatives, we obtain
and
for the reaction–diffusion system (7) with reaction term \(f_{i}(n)\) as in the reaction–diffusion models (3) and (4), respectively.
From Definition 4, it is clear that for Turing instability, we require a spatially constant asymptotically stable equilibrium point of system (7), which becomes unstable in the presence of diffusion. Therefore, Turing instability is concerned with finding the conditions on B, k, and D (diffusion matrix), such that in the presence of diffusion, the matrix \(B(k)=B - k^{2}D\) has an eigenvalue with a positive real part. Vickers (1989) and Vickers et al. (1993) have shown that spatial patterns (Turing instability) are observed when the matrix B has all characteristic roots with negative real parts [together with the zero root, for B in the system (3)] and the matrix B(k) has at least one root with positive real part for specific ranges of wavenumber k. Vickers et al. (1993) and Cressman and Vickers (1997) also derived some results regarding Turing instability in the reaction–diffusion model (3) and (4), respectively.
In the next subsection, we discuss briefly the concept of reactivity, which is going to play an important role in deriving the necessary condition for Turing instability in terms of diffusion coefficients.
2.3 Reactivity
It is known that when \(n^{*}\) is temporally stable, then any perturbation to \(n^{*}\) tends to zero asymptotically. However, some perturbations achieve their maximum first in a very short time, and after that, they tend to zero. On the other hand, some perturbations tend to zero monotonically. The short-term transient behaviour may be different from asymptotic behaviour.
Consider an initial perturbation of magnitude \( \Vert P_{0} \Vert \), to the asymptotically stable equilibrium point of the linearised system
where B is the linearised Jacobian matrix of system (7) without diffusion. The perturbation P in \(n^{*}\), will increase or decrease depending upon the initial condition \(P(0)=P_{0}\) and time. Now, the reactivity of stable equilibrium point \(n^{*}\) is defined as
Definition 5
(Reactivity) (Neubert and Caswell 1997) The reactivity of the stable equilibrium point \(n^{*}\) is the maximum amplification rate, over all initial perturbations, that is
or
where \(\Vert . \Vert \) is 2-norm.
For a nonlinear system, the reactivity of a stable equilibrium point is computed from the linearised system near that equilibrium point. Equilibria with positive reactivity are called reactive.
Revisiting Definition 5, the term \(\dfrac{\mathrm{d}\Vert P(t) \Vert }{\mathrm{d}t}\) can be rewritten as
Define the matrix Hr(B) as
Therefore, from Eqs. (14) and (15), we get
The R.H.S. of (16) is known as the Rayleigh quotient. Consequently, reactivity is the maximum of this ratio over \(P_{0}\). By Rayleigh’s Principle (see Johnson and Horn 1985), largest eigenvalue of matrix Hr(B) is the maximum value of Rayleigh quotient. Thus, the Definition 5 can also be written as
where \(\lambda _{1}\left( Hr(B)\right) \) is the largest eigenvalue of Hr(B) (since Hr(B) is Hermitian, its eigenvalues are real). While the eigenvalues of B determine the asymptotic behaviour of the linearised system (13), the eigenvalues of Hr(B) determine its transient behaviour. Therefore, if \(\lambda _{1}(Hr(B))> 0\), then the equilibrium point will be reactive, and the magnitude of corresponding perturbation will initially grow before decaying.
In the following subsection, we describe the connection between reactivity and Turing instability.
2.3.1 Turing instability and reactivity
In this subsection, we briefly discuss the conditions for Turing instability in the reaction–diffusion system (7) in terms of reactivity. In the absence of diffusion, stability of the homogeneous equilibrium point is determined by eigenvalues of the linearised matrix B, whereas reactivity is determined by eigenvalues of the matrix Hr(B). The linearised systems with and without diffusion are different. Now, we recall that spatially homogeneous equilibrium point \(n^{*}\) can be unstable to spatial perturbation only if this equilibrium is reactive, or equivalently positive reactivity of an equilibrium point is necessary for Turing instability (see also Neubert et al. 2002).
For a small spatial perturbation \(\hat{P}(x, t)\) to \(n^{*}\) [i.e., \(\hat{P}(x, t)=y \exp (\lambda t+\iota kx)\), using (8)], we get the linearised system as
where \(B(k)=B-k^{2}D\).
Let \(\lambda _{1}(B(k))\) be an eigenvalue of B(k) with largest real part. If \(Re(\lambda _{1}(B(k)))< 0\), then \({\lim _{t\rightarrow \infty }\Vert \hat{P}(x,t) \Vert =0}\). If this holds for all k, then \(n^{*}\) is stable in the presence of diffusion. However, if \(Re(\lambda _{1}(B(k)))>0\) for some k, then perturbations with this spatial frequency will grow and gives rise to Turing instability. Therefore, the equilibrium point \(n^{*}\) is destabilised by diffusion. Using (17) and Definition 5, Neubert et al. (2002) established that positive reactivity is necessary for Turing instability.
In view of above discussion, we derive a necessary condition for Turing instability in terms of diffusion coefficients and reactivity, in the next section.
3 Necessary condition for turing instability in terms of diffusion coefficients and reactivity
It is well known that for Turing instability, there must be variability in diffusion coefficients (see, e.g., Turing 1952; Vickers 1989; Cressman and Vickers 1997; Vickers et al. 1993). Therefore, the discussion in Sect. 2 leads us to derive a necessary condition for Turing instability in the reaction–diffusion system (7) in term of diffusion coefficients and reactivity, as given in the theorem below.
Theorem 1
Let \( n^{*} = N^{*}p^{*}\) be a temporally stable equilibrium point of the reaction–diffusion system (7) with \( n_{i}^{*} > 0, ~ i= 1, 2, \dots , r\). If there is Turing instability in system (7) due to perturbation (8) corresponding to wavenumber \(k>0\), with \(d_{i}\ge 0,~i= 1, 2, \dots , r\), then \(d_{\mathrm{min}}<\dfrac{\lambda _{1}(Hr(B))}{k^{2}}\) (here, \(d_{\mathrm{min}}=\min \left( d_{1}, d_{2}, \dots , d_{r}\right) \) and \(\lambda _{1}(Hr(B))\) is positive reactivity).
Proof
Assume that \(d_{i}\ge 0,~i=1, 2, \dots , r\), and there is Turing instability in system (7) due to perturbation (8) corresponding to wavenumber k. Using the linearised transformation (17), we have
where Hr(B(k)) is the Hermitian matrix given by
By Rayleigh’s Principle (see Johnson and Horn 1985), we get
where \(\lambda _{1}(Hr(B(k)))\) is the largest eigenvalue of Hr(B(k)). Thus, from (18) and (19), we have
Since there is Turing instability in the reaction–diffusion system, we must have \(\lambda _{1}(Hr(B(k))) >0 \) (otherwise, \({\lim _{t\rightarrow \infty }\Vert \hat{P}(k,t) \Vert =0}\), giving no Turing instability). Also, in (19), the right-hand side is a sum of symmetric matrices. Therefore, by Weyl’s theorem (see Johnson and Horn 1985), the largest eigenvalue of the sum is less than or equal to the sum of largest eigenvalues of each matrix. Note that the largest eigenvalue of the matrix Hr(B) is positive, that is, \(\lambda _{1}(Hr(B))>0\), for Turing instability (see, e.g., Neubert et al. 2002). Moreover, the largest eigenvalue of the matrix \(-k^{2}D\) is \(-k^{2}d_{\mathrm{min}}\). Thus, for the given \(k>0\), the smallest diffusion coefficient \(d_{\mathrm{min}}\) is strictly less than \(\dfrac{\lambda _{1}(Hr(B))}{k^{2}}\) which can be written equivalently as
This completes the proof. \(\square \)
Next, we illustrate Theorem 1 using an example.
Example 1
Suppose that the pay-off matrix of the symmetric contest between two players, each having two strategies in a population game, is
Consider the reaction–diffusion model (4) with background fitness function \(F(N)=3-3N \). Then, \(N^{*}=1\) and \(p^{*}=\left( \dfrac{1}{2}, \dfrac{1}{2}\right) \) which is also an ESS of A. Therefore, \(n^{*}=N^{*}p^{*}=\left( \dfrac{1}{2}, \dfrac{1}{2} \right) \) is an equilibrium point of the associated reaction–diffusion system (4). The Jacobian matrix in the absence of diffusion [see (11)] is
The eigenvalues of B are \(-2,-3\). Thus, \(n^{*}=\left( \dfrac{1}{2}, \dfrac{1}{2}\right) \) is stable when diffusion is not present in the system, and Fig. 1 confirms this.

These figures represent the fluctuations in \(n_{1}(t)\) and \(n_{2}(t)\) with initial states (1, 0), (0, 1) and (0.2, 0.8), respectively
Associated Hermitian matrix Hr(B) is given by
and \(\lambda _{1}(Hr(B))= 24.1421\), which shows that \(n^{*}\) is reactive. Suppose that \(0\le d_{1}<d_{2}=2\), and there is Turing instability in system (4). By Theorem 1, \(d_{1}< \dfrac{\lambda _{1}(Hr(B))}{k^{2}}\), i.e., \(d_{1}<\dfrac{24.1421}{k^{2}}\). For instance, take \(d_{1}=0,~d_{2}=2\), then Jacobian matrix \(B(k)=B-k^{2}D\) has at least one positive eigenvalue for \(k^{2}>3\). Fix \(k^{2}=4\). This yields the Jacobian matrix in the presence of diffusion (see (12)) as
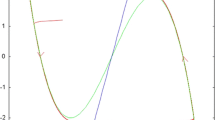
having eigenvalues \(-13.1521, ~0.1521\). The positive eigenvalue causes Turing instability in the reaction–diffusion system (4). Figure 2 shows the approximate unstable behaviour (perturbations in \(n^{*}\) corresponding to eigenvalue 0.1520673) near \(n^{*}=\left( \dfrac{1}{2}, \dfrac{1}{2} \right) \) in the presence of diffusion.

Variations of \(n_{i}(x, t)\) in the domain \([0, 2\pi ]\times [0, 1]\) (\(d_{1}=0,~d_{2}=2\), \(k^{2}=4\))
Similarly, when we take \(d_{1}=\dfrac{1}{12}, ~d_{2}=6\), for \(1.22<k^{2}<9.772\), the matrix B(k) has at least one positive eigenvalue. For instance, take \(k^{2}=4\). Then, the Jacobian matrix
has eigenvalues \(-29.603571, ~ 0.2702376\), causing Turing instability. Figure 3 shows the approximate unstable behaviour (perturbations in \(n^{*}\) corresponding to eigenvalue 0.2702376) near \(n^{*}=\left( \dfrac{1}{2}, \dfrac{1}{2}\right) \) in the presence of diffusion.

Variations of \(n_{i}(x, t)\) in the domain \([0, 2\pi ]\times [0, 0.1]\) (\(d_{1}=\dfrac{1}{12},~d_{2}=6\), \(k^{2}=4\))
Note that here the necessary condition \(d_{\mathrm{min}}< \dfrac{\lambda _{1}(Hr(B))}{k^{2}}\) is satisfied for \(1.22<k^{2}<9.772\), that is reflected in Fig. 4.

This graph shows that, for \(d_{1}=\dfrac{1}{12},~ d_{2}= 6\), and \(1.22<k^{2}<9.772\), the expression \(k^{2}d_{\mathrm{min}}-\lambda _{1}(Hr(B))\) is negative
In the next section, we derive necessary conditions for Turing instability that do not depend explicitly on the reactivity of the equilibrium point.
4 Explicit conditions for diffusion coefficients and the wavenumber k
It is clear from the proof of Theorem 1 (in Sect. 3) that, for Turing instability in the reaction–diffusion system (7) with \(d_{i}\ge 0\), the largest eigenvalue of the matrix Hr(B(k)) is positive (i.e., \(\lambda _{1}(Hr(B(k))) > 0\)). In view of this, we use the Routh–Hurwitz criterion for the symmetric matrix Hr(B(k)) and derive results regarding Turing instability in the reaction–diffusion system (7).
4.1 Necessary conditions in terms of diffusion coefficients and wavenumber for three strategies games
Let the characteristic equation of the matrix Hr(B(k)) (with r=3) be
where \( p_{1}(k)= -tr[Hr(B(k))]\), \(p_{2}(k)=M_{11}(k)+M_{22}(k)+M_{33}(k)\) and \(p_{3}(k)=-det[Hr(B(k))]\). Here, \(M_{ii}(k)\) is the cofactor of the diagonal element \(h_{ii}(k)\).
Now, the Routh–Hurwitz matrix H(k) for (20) can be written as
Therefore, by Proposition 1, the matrix Hr(B(k)) is stable if the following Routh–Hurwitz conditions are satisfied:
-
1.
\( det[Hr(B(k))] = -p_{3}(k) < 0 \),
-
2.
\( tr[Hr(B(k))] = -p_{1}(k) < 0 \),
-
3.
\( p_{2}(k) p_{1}(k) - p_{3}(k) > 0 \).
It is useful to note that
Here, diagonal elements of Hr(B) are the same as that of the matrix B, that is, \(h_{ii}=b_{ii}\). This yields \(tr[Hr(B)]=tr[B]<0\) (because \(Hr(B)= \dfrac{B+B^{T}}{2}\) and B is assumed to be stable). And \(M_{ii}\) is the diagonal cofactor of \(h_{ii}\). Note that if \(h_{ii}=b_{ii}<0\), \(M_{ii}>0\) for all i, and \(det[Hr(B)]\le 0\), then \(p_{i}(k)>0,~i=1, 2, 3\). Therefore, the matrix Hr(B(k)) turns out to be stable. It is now clear that if any of the three Routh–Hurwitz conditions fail to hold, then Turing instability will occur. In particular, the matrix Hr(B(k)) has at least one positive eigenvalue and \(p_{i}(k)\) is negative for some i. Observe that \(p_{1}(k)\) is always positive, which yields \(p_{2}(k)<0\) or \(p_{3}(k)<0\). Keeping this in mind, we derive necessary conditions for Turing Instability, depending upon diffusion coefficients and wavenumber k, as given below.
Let us suppose that there is Turing instability in system (7). From the above discussion, it follows that \(p_{2}(k)<0\) or \(p_{3}(k)<0\).
Take \(d_{1}=d_{2}= 0\). Then, \(d_{3}>0\) is the largest diffusion coefficient which satisfies \(d_{3}M_{33}k^{2} < det[Hr(B)]\) or \(d_{3}(h_{11}+h_{22})k^{2} >\sum \nolimits _{i}M_{ii}\), for given wavenumber k. From this discussion, the next theorem follows.
Theorem 2
Let \( n^{*} = N^{*}p^{*}\) be a temporally stable equilibrium point of the reaction–diffusion system (7) with \( n_{i}^{*} > 0, ~ i= 1, 2, 3\). Suppose that \(d_{1}=d_{2}= 0\) and there is Turing instability in system (7), for a given wavenumber k. Then, the largest positive diffusion coefficient \(d_{3}\) satisfies \(d_{3}M_{33}k^{2} < det[Hr(B)]\) or \(d_{3}(h_{11}+h_{22})k^{2} > \sum \nolimits _{i}M_{ii}\).
We now consider an example which illustrates Theorem 2.
Example 2
Consider an infinite population in which there are two-player symmetric contests with three strategies and pay-off matrix
Take the reaction–diffusion model (4) with background fitness function \(F(N)=4-4N\). Then, \(N^{*}=1\) and \(p^{*}=\left( \dfrac{1}{3}, \dfrac{1}{3}, \dfrac{1}{3}\right) \), i.e., \(n^{*}=p^{*}\). Clearly, \(p^{*}\) is not an ESS, because \(E(p^{*}, q)>E(q, q)\) is not true for \(q=\left( \dfrac{1}{2}, \dfrac{1}{2}, 0\right) \) which is an alternate best response to \(p^{*}\). The associated Jacobian matrix is
The eigenvalues of B are \(-4,~ -0.1667 \mp 0.441 \iota \), implying the stability of the matrix B. Stability behaviour of \(n^{*}\) in the absence of diffusion is shown in Fig. 5.

These figures represent the fluctuations in \(n_{1}(t)\), \(n_{2}(t)\), and \(n_{3}(t)\) with initial states (1, 0, 0), (0, 1, 0), and (0, 0, 1), respectively
Now, the Hermitian matrix Hr(B) is calculated as
having largest eigenvalue \(\lambda _{1}(Hr(B))=0.3504\). This shows that \(n^{*}\) is reactive.
Take \(d_{1}=d_{2}=0\) and suppose that there is Turing instability in the reaction–diffusion system (4). Therefore, by Theorem 2, at least one of the two necessary conditions holds. In fact, in this example, one of the conditions is satisfied, namely, \(d_{3}M_{33}k^{2} < det[Hr(B)]\), for \(d_{3}=3\) and \(k^{2}=4\) (i.e., \(\dfrac{-12}{9}<0.1759\)). Now, for \(d_{1}=d_{2}=0\), \(d_{3}=3\), and \(k^{2}=4\), the Jacobian matrix is
The eigenvalues of B(k) are \(-15.1745,~ -1.1836, ~ 0.0247\). The single positive eigenvalue causes the Turing instability in the reaction–diffusion system (4), and Fig. 6 depicts the approximate unstable behaviour (perturbation in \(n^{*}\) corresponding to eigenvalue 0.0247) near \(n^{*}\) in the presence of diffusion.

Variations of \(n_{i}(x, t)\) in the domain \([0, 2\pi ]\times [0, 1]\) (\(d_{1}=d_{2}=0,~ d_{3}=3\), \(k^{2}=4\))
Note that in this example, the necessary condition as given in Theorem 1 is also satisfied, that is, \(d_{\mathrm{min}}<\dfrac{\lambda _{1}(Hr(B))}{k^{2}}\) or \(0 <0.0876\).
In the next subsection, we derive analogous necessary conditions for Turing instability with four strategies, in terms of diffusion coefficients and the wavenumber k.
4.2 Necessary conditions in terms of diffusion coefficients and wavenumber for four strategies games
Let the characteristic equation of the matrix Hr(B(k)) (with \(r=4\)) be
The Routh–Hurwitz matrix H(k) for (21) can be written as
Therefore, by Proposition 1, the matrix Hr(B(k)) is stable if the following Routh–Hurwitz conditions are satisfied:
-
1.
\(det[B(k)] = p_{4}(k) >0\),
-
2.
\( tr[B(k)] = -p_{1}(k)<0\),
-
3.
\( p_{2}(k)p_{1}(k)-p_{3}(k)>0\),
-
4.
\(p_{1}(k)\left( p_{3}(k)p_{2}(k)-p_{4}(k)p_{1}(k)\right) -p_{3}^{2}(k)>0\),
where
Here, \(h_{ii}=b_{ii}\) and \( F_{ij}= h_{ii}h_{jj}-h_{ij}h_{ji}\). In particular, \( F_{ij} = F_{ji}\) and \(F_{ii} = 0\).
The Routh–Hurwitz conditions are satisfied for the matrix Hr(B(k)) if for all i, j, \(h_{ii}< 0\), \(F_{ij} > 0 \), \(M_{ii} < 0 \), and \(det[Hr(B)]>0\). For Turing instability to occur, at least one of the \(p_{l}(k),~l=2, 3, 4\) must be negative (because \(p_{1}(k)\) is always positive).
Assume that there is Turing instability in the reaction–diffusion system (7) corresponding to a given wavenumber k. Take \(d_{1}=d_{2}=d_{3}=0\). Then, the largest diffusion coefficient \(d_{4}>0\), satisfies \(d_{4}M_{44}k^{2} > det[Hr(B)]\) or \(d_{4}(F_{12}+F_{13}+F_{23})k^{2} < \sum \nolimits _{i=1}^{4}M_{ii}\) or \(d_{4}(h_{11}+h_{22}+h_{33})k^{2} > (F_{12}+F_{13}+F_{14}+F_{23}+F_{24}+F_{34})\). From the above discussion, the next theorem follows.
Theorem 3
Let \( n^{*} = N^{*}p^{*}\) be a temporally stable equilibrium point of system (7) with \( n_{i}^{*} > 0, ~i= 1, 2, 3, 4\). Suppose \(d_{1}=d_{2}=d_{3}=0\) and there is Turing instability in the reaction–diffusion system (7), for a given wavenumber k. Then, the largest positive diffusion coefficient \(d_{4}\) satisfies \(d_{4}M_{44}k^{2} > det[Hr(B)]\) or \(d_{4}(F_{12}+F_{13}+F_{23})k^{2} < \sum \limits _{i=1}^{4}M_{ii}\) or \(d_{4}(h_{11}+h_{22}+h_{33})k^{2} >(F_{12}+F_{13}+F_{14}+F_{23}+F_{24}+F_{34})\). Here, \( F_{ij}= h_{ii}h_{jj}-h_{ij}h_{ji}\), and \(M_{ii}\) is the diagonal cofactor of \(h_{ii}\).
For illustration of Theorem 3, we consider the following example.
Example 3
For the pay-off matrix
in the reaction–diffusion system (4) with \(F(N)= 1-N\), the equilibrium point is \(n^{*}=N^{*}p^{*}=\left( \dfrac{1}{4}, \dfrac{1}{4}, \dfrac{1}{4}, \dfrac{1}{4}\right) \). The associated Jacobian matrix in the absence of diffusion is
The eigenvalues of the matrix B are \(-0.25, ~-0.25, ~-1, ~-1\), and hence, the equilibrium point \(n^{*}\) is stable. Now, the Hermitian matrix Hr(B) is
The largest eigenvalue of Hr(B) is \(\lambda _{1}(Hr(B))=0.1418\) which shows that the equilibrium point \(n^{*}\) is reactive.
Take \(d_{1}=d_{2}=d_{3}=0\), and suppose that there is Turing instability in the reaction–diffusion system (7) corresponding to the wavenumber \(k=2\). Therefore, by Theorem 3, at least one of the three necessary conditions holds. In fact, in this example, two of them are satisfied, namely, \(d_{4}M_{44}k^{2} > det[Hr(B)]\) and \(d_{4}(F_{12}+F_{13}+F_{23})k^{2} < \sum \nolimits _{i=1}^{4}M_{ii}\), are satisfied for \(d_{4}=5\) (i.e., \(1.406>-0.1494\) and \(-1.8750<0.6562\), respectively). Now, the Jacobian matrix in the presence of diffusion (when \(d_{1}=d_{2}=d_{3}=0, ~d_{4}=5\), and \(k^{2}=4\)) is
The eigenvalues of B(k) are \(-1.1623, ~ -0.25, ~ -21.2295, ~0.1418\). The single positive eigenvalue gives rise to the Turing instability in system (4). Figure 7 shows the approximate unstable behaviour of \(n^{*}\) in the presence of diffusion.
Note that the necessary condition for Turing instability as given in Theorem 1, namely, \(0=d_{\mathrm{min}}< \dfrac{\lambda _{1}(Hr(B))}{k^{2}}=0.03545\) is also satisfied here.

Variations of \(n_{i}(x, t)\) in the domain \([0, 2\pi ]\times [0, 1]\) (\(d_{1}=d_{2}=d_{3}=0,~ d_{4}=5\), \(k^{2}=4\))
5 Conclusion
We have derived necessary conditions for Turing instability of stable equilibrium points of the reaction–diffusion system associated with replicator dynamics. The main results (Theorems 1, 2, 3) of the present paper are based on the connection between Turing instability and reactivity of stable equilibrium point. More specifically, in Theorem 1, we established that a necessary condition for Turing instability is that the smallest diffusion coefficient \(d_{\mathrm{min}}\) is strictly less than the ratio of positive reactivity and square of the wavenumber k. From a population perspective, this means that, if individuals adopting pure strategies corresponding to the minimum diffusion coefficient deviate from the population state or strategy \(p^{*}\), then the above-mentioned necessary condition should hold true. Also, while proving Theorem 1, it was observed that the largest eigenvalue of the matrix Hr(B(k)) is positive, that is, the corresponding perturbation \(\hat{P}(x,t)\) does not die out. This leads us to derive explicit necessary conditions for Turing instability when players have three (Theorem 2) or four (Theorem 3) strategies. Again, this may be interpreted as follows: if players adopting the pure strategies corresponding to the maximum diffusion coefficient in Theorem 2 or 3 deviate from the population state or strategy \(p^{*}\), then necessary conditions for Turing instability should hold true. Note that in Theorems 2 and 3, necessary conditions for Turing instability are obtained by considering specific values for some diffusion coefficients. It would be interesting to derive necessary conditions for games with any number of pure strategies with minimal constraints on diffusion coefficients.
References
Cressman R, Vickers GT (1997) Spatial and density effects in evolutionary game theory. J Theor Biol 184(4):359–369
Gantmakher FR (1998) The theory of matrices, vol 131. American Mathematical Society, Providence
Hofbauer J, Sigmund K et al (1998) Evolutionary games and population dynamics. Cambridge University Press, Cambridge
Johnson CR, Horn RA (1985) Matrix analysis. Cambridge University Press, Cambridge
Murray JD (2007) Mathematical biology: I. An introduction, vol 17. Springer Science & Business Media, New York
Nanda M, Durrett R (2017) Spatial evolutionary games with weak selection. Proc Natl Acad Sci 114(23):6046–6051
Neubert MG, Caswell H (1997) Alternatives to resilience for measuring the responses of ecological systems to perturbations. Ecology 78(3):653–665
Neubert MG, Caswell H, Murray JD (2002) Transient dynamics and pattern formation: reactivity is necessary for turing instabilities. Math Biosci 175(1):1–11
Novozhilov AS, Posvyanskii VP, Bratus AS (2012) On the reaction-diffusion replicator systems: spatial patterns and asymptotic behaviour. Russ J Numer Anal Math Model 26(6):555–564
Park HJ, Gokhale CS (2019) Ecological feedback on diffusion dynamics. R Soc Open Sci 6(2):181273
Qian H, Murray JD (2001) A simple method of parameter space determination for diffusion-driven instability with three species. Appl Math Lett 14(4):405–411
Roca CP, Cuesta JA, Sánchez A (2009) Evolutionary game theory: temporal and spatial effects beyond replicator dynamics. Phys Life Rev 6(4):208–249
Schuster P, Sigmund K (1983) Replicator dynamics. J Theor Biol 100(3):533–538
Smith JM (1974) The theory of games and the evolution of animal conflicts. J Theor Biol 47(1):209–221
Smith JM (1982) Evolution and the theory of games. Cambridge University Press, Cambridge
Smith JM, Price GR (1973) The logic of animal conflict. Nature 246(5427):15–18
Taylor PD, Jonker LB (1978) Evolutionary stable strategies and game dynamics. Math Biosci 40(1–2):145–156
Turing AM (1952) The chemical basis of morphogenesis. Bull Math Biol 52(1):153–197
Vickers GT (1989) Spatial patterns and ESS’s. J Theor Biol 140(1):129–135
Vickers GT, Hutson VCL, Budd CJ (1993) Spatial patterns in population conflicts. J Math Biol 31(4):411–430
Weibull JW (1997) Evolutionary game theory. MIT Press, Cambridge
Author information
Authors and Affiliations
Corresponding author
Additional information
Communicated by Valeria Neves Domingos Cavalcanti.
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Kumar, M., Shaiju, A.J. Necessary conditions for Turing instability in the reaction–diffusion systems associated with replicator dynamics. Comp. Appl. Math. 41, 160 (2022). https://doi.org/10.1007/s40314-022-01861-y
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1007/s40314-022-01861-y
Keywords
- Evolutionary game theory
- ESS
- Replicator dynamics
- Reaction–diffusion systems
- Turing instability
- Reactivity