
Abstract
The purpose of this research is to provide sufficient conditions for the local and global existence of solutions for two-dimensional nonlinear fractional Volterra and Fredholm integral equations, based on the Schauder’s and Tychonoff’s fixed-point theorems. Also, we provide sufficient conditions for the uniqueness of the solutions. Moreover, we use operational matrices of hybrid of two-dimensional block-pulse functions and two-variable shifted Legendre polynomials via collocation method to find approximate solutions of the mentioned equations. In addition, a discussion on error bound and convergence analysis of the proposed method is presented. Finally, the accuracy and efficiency of the presented method are confirmed by solving three illustrative examples and comparing the results of the proposed method with other existing numerical methods in the literature.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
The fractional calculus deals with derivatives and integrals to an arbitrary order. In recent years, a large number of scientific and engineering problems involving fractional calculus. It provides more accurate models of systems under consideration. The applications of fractional calculus have been demonstrated by many authors. Many systems in interdisciplinary fields, such as biological systems (Ahmed and Elgazzar 2007; Zalp and Demirci 2011), turbulence (Chen 2006), anomalous diffusion (Chen et al. 2010; Sun et al. 2009), viscoelastic systems (Rossikhin and Shitikova 1997), and partial bed-load transport (Sun et al. 2015), can be described with the help of fractional derivatives. Moreover, various problems in fluid mechanics, biology, physics, physiology, optics, and climatology can be modeled by fractional integral equations (Atanackovic and Stankovic 2004; Evans et al. 2017). In many situations, analytic solutions of fractional integral and differential equations are not available, or may these equations not be directly solvable. Therefore, finding efficient numerical methods to approximate the solutions of these equations has become the main objective of many mathematicians. For a review on numerical methods, see, for instance, (Amin et al. 2021; Aminikhah et al. 2017; Dahaghin and Hassani 2017; Esmaeili et al. 2011; Fathizadeh et al. 2017; Hassani et al. 2019; Hassani and Naraghirad 2019; Hesameddini and Shahbazi 2018; Hassani et al. 2019a, b; Jabari Sabeg et al. 2017; Kılıçman and Al Zhour 2007; Li and Shah 2017; Mohammadi Rick and Rashidinia 2019; Maleknejad et al. 2018, 2020a, b, c; Mashoof and Refahi Shekhani 2017; Mirzaee and Samadyar 2019; Najafalizadeh and Ezzati 2016; Nouri et al. 2018; Pourbabaee and Saadatmandi 2019; Permoon et al. 2016; Rahimkhani et al. 2018; Samadyar and Mirzaee 2019; Shah and Wang 2019; Zhu and Fan 2012).
In this research study, the following fractional integral equations of the second kind are considered:
Two-dimensional nonlinear fractional Volterra integral equations (2D-NFVIEs):
Two-dimensional nonlinear fractional Fredholm integral equations (2D-NFFIEs):
where f(x, y) , \( {k}(x,y,\tau ,\varsigma ,f(\tau ,\varsigma )) \) are unknown functions and g(x, y) is a given function. Also, \( {\iota _1},~ {\iota _2}>0 \) and \( (x,y) \in \varOmega = [0,{\ell _1}] \times [0,{\ell _2}] \).
The outline of this paper is as follows. First, in Sect. 2, a review of two definitions required in this paper is given. In Sect. 3, sufficient conditions for the existence and uniqueness of solutions for 2D-NFVIEs and 2D-NFFIEs are provided. Also, in Sect. 4, the hybrid of two-dimensional block-pulse functions and two-variable shifted Legendre polynomials (2D-HBPSLs) and their operational matrices of product and fractional integration are introduced. Afterward, in Sect. 5, we explain numerical solutions of 2D-NFVIEs and 2D-NFFIEs, respectively, by using what was introduced in Sect. 4. Moreover, in Sect. 6, error bound and convergence analysis of the proposed method are discussed. To demonstrate the effectiveness of the presented method, three numerical examples are given in Sect. 7. Finally, in Sect. 8, a conclusion is given.
2 Preliminary knowledge
Here, we give two necessary definitions of the fractional calculus theory which are used throughout this paper.
Definition 1
(See Podlubony 1999) The Riemann–Liouville fractional integral of order \( \alpha >0 \) is defined by
where \( \upsilon >0 \). If \( \upsilon =0 \), for simplicity, we will denote the Riemann–Liouville fractional integral of order \( \alpha \) of f(x) with \( {I^\alpha }f(x) \).
Definition 2
(See Abbas and Benchohra 2014) The left-sided mixed Riemann–Liouville fractional integral of order \( \iota :=({\iota _1},{\iota _2}) \in (0,\infty ) \times (0,\infty ) \) of f is defined by
where \( \sigma = ({\sigma _1},{\sigma _2}) \). If \( \sigma = (0,0) \), for simplicity, we will denote the left-sided mixed Riemann–Liouville fractional integral of order \( \iota \) of f(x, y) with \( {I^\iota }f(x,y) \).
3 Existence and uniqueness of solutions
In this section, we provide sufficient conditions for the existence and uniqueness of solutions for 2D-NFVIEs (1) and 2D-NFFIEs (2) in a Banach space. To do this, we need the following theorems.
Theorem 1
(The Arzela-Ascoli theorem (Conway 2007)) If E is compact and \( B \subseteq C(E) \), then B is totally bounded if and only if B is bounded and equicontinuous.
Corollary 1
(See Conway 2007) If E is compact and \( B \subseteq C(E) \), then B is compact if and only if B is bounded, closed, and equicontinuous.
Theorem 2
(Schauder’s fixed-point theorem (Zeidler 1995)) If \( {\varPi _0} \) is a bounded, closed, convex, nonempty subset of a Banach space V and \( T : {\varPi _0} \rightarrow {\varPi _0} \) is completely continuous, then T has a fixed point.
Theorem 3
(Tychonoff’s fixed-point theorem (Zeidler 1995)) Let V be a complete, locally convex, linear space and \( V_0 \) be a closed, convex, nonempty subset of V. Assume that the mapping \( T : V \rightarrow V \) is continuous and \( T({V_0}) \subset {V_0} \). If the closure of \( T({V_0}) \) is compact, then T has a fixed point in \( V_0 \).
In the following theorem, we prove the local existence of the solutions for 2D-NFVIEs using Schauder’s fixed-point theorem.
Theorem 4
Assume that
- (C1):
-
f , v , g , \( {g_1} \in C(\varOmega ,{\mathbb {R}}^n) \) and \( k \in C(\varOmega \times \varOmega \times {\mathbb {R}}^n,{\mathbb {R}}^n) \), for \( 0 \le \tau \le x \le {\ell _1} \) and \( 0 \le \varsigma \le y \le {\ell _2} \).
- (C2):
-
\( \left| {{g}(x,y) - {g_1}(x,y)} \right| <\frac{\varepsilon }{2} \).
- (C3):
-
\( \left| {k(x,y,\tau ,\varsigma ,{f}(\tau ,\varsigma )) - k(x,y,\tau ,\varsigma ,{v}(\tau ,\varsigma ))} \right| < \frac{{\varepsilon \varGamma (1 + {\iota _1})\varGamma (1 + {\iota _2})}}{{2{\alpha ^{{\iota _1}}}{\beta ^{{\iota _2}}}}} \), for some \( 0< \alpha < {\ell _1} \) and \( 0< \beta < {\ell _2} \).
Then, the 2D-NFVIE has at least one solution on \( 0 \le x \le \alpha ,\, 0 \le y \le \beta \).
Proof
Consider the set \( D =\{ (x,y,\tau ,\varsigma ,f) : (x,y,\tau ,\varsigma )\in \varOmega \times \varOmega , |f| \le b \} \). Let \( |{g}(x,y)|\le \frac{b}{2} \) and \( |k(x,y,\tau ,\varsigma ,{f}(\tau ,\varsigma ))|\le {\xi } \) on D. Choose \( \frac{{{\xi }{\alpha ^{{\iota _1}}}{\beta ^{{\iota _2}}}}}{{\varGamma (1+{\iota _1})\varGamma (1+{\iota _2})}} \le \frac{b}{2} \) and let \( {\varPi _0}=\{f : f\in C({\varOmega _0},{\mathbb {R}}^n) ,~ \left\| f \right\| \le b\} \), where \( \left\| f \right\| = {\mathop {\max }\limits _{(x,y) \in {\varOmega _0}}} |f(x,y)| \) and \( {\varOmega _0}=[0,\alpha ]\times [0,\beta ] \). Clearly, the set \( {\varPi _0} \) is bounded, closed, and convex.
For any \(f \in {\varPi _0}\), define the operator
Clearly, we have
Therefore, we obtain \( \left\| {Tf} \right\| \le b \), which implies that \( T({\varPi _0}) \subset {\varPi _0} \). Furthermore, for any \( ({x_1},{y_1}),\, ({x_2},{y_2}) \in \varOmega _0 \) such that \( {x_2}>{x_1} \) and \( {y_2}>{y_1} \), we have
Now adding and subtracting \( {{{({x_2} - \tau )}^{{\iota _1} - 1}}{{({y_2} - \varsigma )}^{{\iota _2} - 1}} k({x_1},{y_1},\tau ,\varsigma ,f(\tau ,\varsigma ))} \) to the right-hand side of the inequality (4) yields
Let
and
for \( (\tau ,\varsigma )\in \varOmega \), then we can write
Note that the right-hand side in the inequality (5) tends to zero as \( {x_2}\rightarrow {x_1} , \, {y_2}\rightarrow {y_1} \). Therefore, \( T : {\varPi _0} \rightarrow {\varPi _0} \) is equicontinuous and consequently, from Theorem 1, the closure of \( T({\varPi _0}) \) is compact.
To show that T is a continuous map, let
where \( v \in {\varPi _0} \). Clearly, we have
Since k is uniformly continuous, for an arbitrary \( \varepsilon > 0 \), there exists a \( \delta > 0 \) such that \( | f(x,y)-v(x,y) |<\delta \). Assume that conditions \( (\mathbf{C1} )\)–\((\mathbf{C3} ) \) are satisfied, then we obtain
and the proof is completed. \(\square \)
We shall next discuss a global existence result for the 2D-NFVIEs using Tychonoff’s fixed-point theorem.
Theorem 5
Assume that
- (D1):
-
\( k \in C({\mathbb {R}}_ + ^4 \times {\mathbb {R}}^n ,{\mathbb {R}}^n) \) and \( G \in C({\mathbb {R}}_ + ^5 ,{\mathbb {R}}^n) \).
- (D2):
-
\( G(x,y,\tau ,\varsigma ,u) \) is monotone nondecreasing in u, for each \( (x,y,\tau ,\varsigma )\in {\mathbb {R}}_ + ^4 \).
- (D3):
-
\( \left| {k(x,y,\tau ,\varsigma ,f)} \right| \le G(x,y,\tau ,\varsigma ,\left| f \right| )\), for \((x,y,\tau ,\varsigma ,f) \in {\mathbb {R}}_ + ^4 \times {{\mathbb {R}}^n} \).
Then, the fractional integral equation
has a solution u(x, y) , for every \( x,y\ge 0 \), and then for every \( q(x,y)\in {\mathbb {R}}_ + ^2 \) such that \( \left| g(x,y) \right| \le q(x,y) \), there exists a solution f(x, y) for 2D-NFVIE satisfying \( \left| f(x,y) \right| \le u(x,y) \).
Proof
Assume that the real vector space V consists of all continuous functions from \( (0,\infty )\times (0,\infty ) \) into \( {\mathbb {R}}^n \). The topology on V being that induced by the family of pseudo-norms \( \{ {V_{n,m}}(f)\} _{{n,m} = 1}^\infty \), where \( {V_{n,m}}(f) = {\mathop {\sup }\nolimits _{0 \le x \le n,0 \le y \le m}} \left| {f(x,y)} \right| \), for \( f \in V \). Let \( \{{S_{n,m}}\} _{n,m = 1}^\infty \) be a fundamental system of neighborhoods, where \( {S_{n,m}} = \{ f \in V:{V_{n,m}}(f) \le 1\} \). Under this topology, V is complete and locally convex linear space.
Now define the subset \({V_0}\) of V as follows:
where u(x, y) is a solution of Eq. (6). It is clear that in the topology of V, \( V_0 \) is closed, convex, and bounded.
Consider the Eq. (6) whose fixed point corresponds to a solution of Eq. (1). Evidently, in the topology of V, the operator T is compact. Hence, in view of the boundedness of \( {V_0} \), the closure of \( T({V_0}) \) is compact.
Now using conditions \( (\mathbf{D1} )\)–\((\mathbf{D3} ) \), we observe that for any \( f\in {V_0} \),
It is clear that using the fact that u(x, y) is a solution of 2D-NFVIE and from the definition of \(V_0\), we can obtain \( \left| {Tf(x,y)} \right| \le u(x,y) \), which implies that \(T({V_0}) \subset {V_0}\). Therefore, by Tychonoff’s fixed-point theorem, the mapping T has a fixed point in \( {V_0} \), which completes the proof of this theorem. \(\square \)
In the following theorem, we prove the uniqueness of the solution for 2D-NFVIEs.
Theorem 6
Let \( f \in C(\varOmega ,{\mathbb {R}}^n) \) and \( k \in C(\varOmega \times \varOmega \times {\mathbb {R}}^n ,{\mathbb {R}}^n) \). Suppose that there exists \( 0< L_1 < 1 \) such that the following Lipschitz condition is satisfied:
If \( \frac{{{L_1}{{\ell }_1^{\iota _1}}{{\ell }_2^{\iota _2}}}}{{\varGamma ({\iota _1}+1)\varGamma ({\iota _2}+1)}} < 1 \), then the 2D-NFVIE has a unique solution.
Proof
Let
then, for any \( {f},~ {f_1} \in C(\varOmega ,{\mathbb {R}}^n) \) and \( (x,y) \in \varOmega \), we have
Therefore,
Since \( \frac{{{L_1}{{\ell }_1^{\iota _1}}{{\ell }_2^{\iota _2}}}}{{\varGamma ({\iota _1}+1)\varGamma ({\iota _2}+1)}} < 1 \), it follows that T is a contraction in \( C(\varOmega ,{\mathbb {R}}^n) \). Consequently, T has a unique fixed point and therefore the 2D-NFVIE has a unique solution \( {f} \in C(\varOmega ,{\mathbb {R}}^n) \). \(\square \)
Now, in the following theorems, we are going to investigate a result of the existence and uniqueness of the solution for 2D-NFFIEs.
Theorem 7
Assume that conditions \( (\mathbf{C1} )\)–\((\mathbf{C3} ) \) in Theorem 4 hold. Then the 2D-NFFIE has at least one solution on \( 0 \le x \le \alpha ,\, 0 \le y \le \beta \).
Proof
The proof of this theorem is similar to the proof of Theorem 4. \(\square \)
Theorem 8
Assume that conditions \( (\mathbf{D1} )\)–\((\mathbf{D3} ) \) in Theorem 5 hold. Then, the fractional integral equation
has a solution u(x, y) existing for every \( x,y\ge 0 \), and then for every \( q(x,y)\in {\mathbb {R}}_ + ^2 \), such that \( \left| g(x,y) \right| \le q(x,y) \), there exists a solution f(x, y) of the 2D-NFFIE for \( x,y\ge 0 \) satisfying \( \left| f(x,y) \right| \le u(x,y) \).
Proof
The proof of this theorem is similar to the proof of Theorem 5. \(\square \)
Theorem 9
Let \( f \in C(\varOmega ,{\mathbb {R}}^n) \) and \( k \in C(\varOmega \times \varOmega \times {\mathbb {R}}^n ,{\mathbb {R}}^n) \). Suppose that there exists \( 0< L_2 < 1 \) such that the following Lipschitz condition is satisfied:
If \( \frac{{{L_2}{{\ell }_1^{\iota _1}}{{\ell }_2^{\iota _2}}}}{{\varGamma ({\iota _1}+1)\varGamma ({\iota _2}+1)}} < 1 \), then the 2D-NFFIE has a unique solution.
Proof
The proof of this theorem is similar to the proof of Theorem 6. \(\square \)
4 The 2D-HBPSLs and the operational matrices
Here, we present the 2D-HBPSLs and use them to obtain the approximation of two-variable functions. Then, we review the operational matrices of fractional integration and product.
First, consider the 1D-HBPSLs on the interval \( [0,{\ell }) \) as follows:
for \(n=1,2,\dots ,N,~ m=0,1,\dots ,M-1\), where N and M are positive integers. Here, \(\phi _{m}\) is Legendre polynomial of degree m which is defined on \([-1,1]\) with the analytic form
The orthogonality property of the 1D-HBPSLs on the interval \( [0,{\ell }) \) is as follows:
Similarly, the 2D-HBPSLs on the domain \( \varOmega =[0,{\ell _1})\times [0,{\ell _2}) \) is defined as follows:
Here \(\phi _{m_{1}}\) and \(\phi _{m_{2}}\) are Legendre polynomials of degrees \(m_{1}\) and \(m_{2}\), respectively, where \(n_{1},n_{2}=1,2,\dots ,N,~ m_{1},m_{2}=0,1,\dots ,M-1\).
The orthogonality property of the 2D-HBPSLs on the domain \( \varOmega \) is
Now consider the space \(X=L^{2}(\varOmega )\) with the norm
where \( \left\langle {.,.} \right\rangle \) denotes the inner product. Let
Since \(X_{N,M} \subset X \) is a finite dimensional vector space, for every \( f \in X \) there exists a unique best approximation \( f_{N,M} \in X_{N,M} \) such that
A proof of this result is given by Cheney (1966), Davis (1975), and Kreyszig (1989). Since \( f_{N,M} \in X_{N,M} \), we have
where
and hybrid coefficients are uniquely obtained by
Now consider \(X =L^{2}(\varOmega \times \varOmega )\) with
Also, a function k in X can be expanded as follows:
where K is the \( N^{2}M^{2} \times N^{2}M^{2} \) known matrix and its entries are given by
Here \(H_{(n)}(x,y)\) denotes the nth element of H(x, y).
4.1 The operational matrix of fractional integration
Maleknejad et al. (2020a) obtained the left-sided mixed Riemann–Liouville fractional integral of order \( \iota := ({\iota _1},{\iota _2}) \) of 2D-HBPSLs as follows:
Here, \( \otimes \) denotes the Kronecker product and \( {\mathbf{I }^{{\iota _1}}} \otimes {\mathbf{I }^{{\iota _2}}} \) is the operational matrix of fractional integration of 2D-HBPSLs, where
and
with \( {\kappa _{_l}} = {(l + 1)^{{\iota _i} + 1}} - 2{l^{{\iota _i} + 1}} + {(l - 1)^{{\iota _i}+ 1}} \), \( l=1,2,\ldots ,NM-1 \), is the operational matrix of fractional integration of block-pulse functions given by Kılıçman and Al Zhour (2007). Also, \( \varPsi _i \) is an \( NM\times NM \) matrix given by
where
is an \( NM\times 1 \) vector of 1D-HBPSLs.
Moreover, from Maleknejad et al. (2020a), we have
where
and
4.2 The product operational matrix
Let H(x, y) be the 2D-HBPSLs vector defined in (10), then we have
where \({{\hat{F}}}\) is defined by (9) and \(\tilde{{{\hat{F}}}}\) is an \( {N^2}{M^2}\times {N^2}{M^2} \) product operational matrix. Maleknejad et al. (2020a) have computed the entries of \(\tilde{{{\hat{F}}}}=diag(C_{i_{1}})_{i_{1}=1,2,\dots ,N} \) as follows:
5 Method of solution
In this section, we suppose that \({k}(x,y,\tau ,\varsigma ,f(\tau ,\varsigma ))={k}(x,y,\tau ,\varsigma ){f^p}(\tau ,\varsigma ) \) and then we use 2D-HBPSLs and their operational matrices for solving Eqs. (1) and (2).
5.1 The method for 2D-NFVIEs
Here, we are going to convert Eq. (1) to a nonlinear system using 2D-HBPSLs. First, we can write
Using (8) and (17) for the function f(x, y) , we obtain
where \({\widetilde{{{\hat{F}}}_2^T}}\) is an \( {N^2}{M^2}\times {N^2}{M^2} \) product operational matrix. By expanding the method for an arbitrary \( p\in \mathbb {N} \), the result is as follows:
Now, using (8), (12), (14), (17) -(19), we get
Therefore, we have
To obtain unknown coefficients \( {{{\hat{f}}}_{n_{1}m_{1}n_{2}m_{2}}} \), for \( n_{1},n_{2}=1,2,\dots ,N,~ m_{1},m_{2}=0,1,\dots ,M-1 \), we collocate Eq. (20) at \( {N^2}{M^2} \) collocation points \( \{({x_i},{y_j})\}_{i,j=1}^{NM} \) in the domain \(\varOmega = [0,{\ell _1}) \times [0,{\ell _2})\), where
are the Newton-Cotes nodes. Therefore, we have \( {N^2}{M^2} \) nonlinear equations. By solving this system, we determine an approximate solution for 2D-NFVIE from (8).
5.2 The method for 2D-NFFIEs
Now we want to convert Eq. (2) to a nonlinear system using 2D-HBPSLs. For this purpose, we apply (8), (12), (16)–(19) in (2) and, therefore, we obtain
So, we have
Obtaining the unknown coefficients \( {{{\hat{f}}}_{n_{1}m_{1}n_{2}m_{2}}} \) in the above system is similar to (20). Therefore, we can determine an approximate solution for 2D-NFFIE from (8).
6 Error bound and convergence analysis
Theorem 10
Suppose that \( f \in {C^{(2M)}}(\varOmega ) \). Let f(x, y) be the exact solution of the 2D-NFVIE and \(f_{N,M}(x,y)\) be its approximate solution obtained by the proposed method. Assume that for \( (x,y)\in \varOmega =[0,{\ell _1})\times [0,{\ell _2}) \), the following assumptions hold:
- (H1):
-
\( g \in {C^{(2M)}}(\varOmega ) \) and \( k \in {C^{(4M)}}(\varOmega \times \varOmega ) \).
- (H2):
-
There exists a Lipschitz constant L such that
$$\begin{aligned} \left| {{f^{p}}(x,y) - f_{N,M}^{p}(x,y)} \right| \le {L}\left| {f(x,y) - {f_{N,M}}(x,y)} \right| . \end{aligned}$$ - (H3):
-
\(\sup _{\varOmega }|{{{f}}^{p}}(x,y) |= a' <\infty \).
- (H4):
-
\(\sup _{\varOmega \times \varOmega }|{k}(x,y,\tau ,\varsigma )|= b' <\infty \).
Then, there exist positive constants \({\mu _1}\) and \({\mu _2}\) such that
Proof
Considering the two-dimensional hybrid expansions of f(x, y) and \( {k}(x,y, \tau ,\varsigma ) \) and also using assumptions \( (\mathbf{H1} )\)–\((\mathbf{H4} ) \) lead to
Now from Maleknejad et al. (2020a) (see Theorem 6, page 16), we can write
and
Also, by taking \( {L^2}- \)norm in the inequality (23), we obtain
By simplifying the above relation and also setting \( {\mu _1} = {a'}{d'} \) and \( {\mu _2} = {b'}{L} \), we get the inequality (22) which completes the proof of the theorem. \(\square \)
Remark 1
To obtain an upper error bound for 2D-NFFIEs, since \( (x,y) \in \varOmega \), we can use a similar way that has been used in Theorem 10.
Remark 2
It is obvious that the right-hand side of the inequality (22) tends to zero as \(N,M \rightarrow \infty \), so \( f - {f}_{N,M} \rightarrow 0 \) and this proves the convergence of the proposed method.
7 Illustrative examples
In this section, we present three examples to demonstrate the accuracy and efficiency of the proposed method. In all these examples, \( {{\hat{n}}} \) denotes the number of bases. All examples are tested on an Intel(R) Core(TM) i5-2450M CPU @ 2.50GHz Processor with 4 GB of RAM using Maple 2018 software on Windows 7 (64 bit) operating system with 16 significant digits (Digits:= 16). The absolute errors in the solutions are obtained by
Also, the maximum absolute errors
are calculated at points \( ({x_i},{y_j}),~ i,j=1,\ldots ,NM \) which are Newton-Cotes nodes in \( [0,{\ell _1})\times [0,{\ell _2}) \).
Moreover, plots of maximum absolute errors are displayed by using
where points \( {y_j},~ j=1,\ldots ,NM \) are Newton-Cotes nodes in \( [0,{\ell _2}) \).
Example 1
Consider the following two-dimensional fractional Fredholm integral equation studied by Hesameddini and Shahbazi (2018); Najafalizadeh and Ezzati (2016):
with the exact solution \( f(x,y) = \frac{1}{2} x y \).
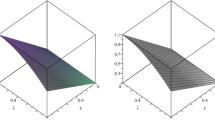
In Tables 1 and 2, respectively, we report the exact and approximate solutions and also the absolute errors in the solutions for \( N=2,~M = 2,3 \) at some selected nodes. These tables state that by using \( {{\hat{n}}} = {N^2}{M^2} = 36 \) numbers of bases, we obtain more accurate results than the 2D-SLPOM and 2D-BPFs methods reported by Hesameddini and Shahbazi (2018); Najafalizadeh and Ezzati (2016), respectively, that used \( {{\hat{n}}} = {(N+1)^2} = {129^2}=16641 \) 2D-SLPOM and \( {{\hat{n}}} = {m^2} = {128^2}=16384 \) 2D-BPFs to solve this problem. Figures 1 and 2 illustrate the accuracy and efficiency of the presented method.

Plots of: a1 the exact solution, b1 the approximate solution, c1 the absolute error with \( N = 2 \) and \( M=3 \) for Example 1

Plots of: d1 the comparison of the exact and approximate solutions, e1 the maximum absolute error with \( N = 2 \) and \( M=3 \) at \( y=0.3 \) for Example 1

Plots of: a2 the exact solution, b2 the approximate solution, c2 the absolute error with \( N = 2 \) and \( M=3 \) for Example 2

Plots of: d2 the comparison of the exact and approximate solutions, e2 the maximum absolute error with \( N = 2 \) and \( M=3 \) at \( y=0.3 \) for Example 2
Example 2
Consider the following two-dimensional fractional Fredholm integral equation studied by Hesameddini and Shahbazi (2018) and Najafalizadeh and Ezzati (2016):
where
with the exact solution \( f(x,y) = {x^2} - x + \frac{1}{2}y \).
In Tables 3 and 4, respectively, we report the exact and approximate solutions and also the absolute errors in the solutions for \( N=2,~M = 2,3 \) at some selected nodes. These tables state that using \( {{\hat{n}}} = {N^2}{M^2} = 36 \) numbers of bases, we obtain more accurate results than the 2D-SLPOM and 2D-BPFs methods reported by Hesameddini and Shahbazi (2018); Najafalizadeh and Ezzati (2016), respectively, that used \( {{\hat{n}}} = {(N+1)^2} = {129^2}=16641 \) 2D-SLPOM and \( {{\hat{n}}} = {m^2} = {128^2}=16384 \) 2D-BPFs to solve this problem. Figures 3 and 4 illustrate the accuracy and efficiency of the presented method.
Example 3
Consider the following two-dimensional nonlinear fractional Volterra integral equation studied by Jabari Sabeg et al. (2017) and Najafalizadeh and Ezzati (2016):
with the exact solution \( f(x,y) = \frac{{\sqrt{3 x y} }}{3} \).
The exact and approximate solutions and also the absolute errors in the solutions, respectively, are reported in Tables 5 and 6 for \( N=2,~M = 3,4 \). These tables state that by using \( {{\hat{n}}} = {N^2}{M^2} = 64 \) numbers of bases, we obtain more accurate results than the 2D-TFs and 2D-BPFs methods reported by Jabari Sabeg et al. (2017) and Najafalizadeh and Ezzati (2016), respectively, that used \( {{\hat{n}}} = 4{m^2} =256 \) 2D-TFs and \( {{\hat{n}}} = {m^2} = {32^2}=1024 \) 2D-BPFs to solve this problem. Figures 5 and 6 illustrate the accuracy and efficiency of the presented method.

Plots of: a3 the exact solution, b3 the approximate solution, c3 the absolute error with \( N = 2 \) and \( M=4 \) for Example 3

Plots of: d3 the comparison of the exact and approximate solutions, e3 the maximum absolute error with \( N = 2 \) and \( M=4 \) at \( y=0.3 \) for Example 3
8 Conclusion
In the presented paper, sufficient conditions were provided for the local and global existence of solutions for 2D-NFVIEs and 2D-NFFIEs, based on the Schauder’s and Tychonoff’s fixed-point theorems. Also, sufficient conditions were provided for the uniqueness of the solutions. Moreover, operational matrices of 2D-HBPSLs via collocation method were applied to find approximate solutions for 2D-NFVIEs and 2D-NFFIEs. The obtained results introduced the presented method as a powerful mathematical tool for solving these fractional integral equations with lower numbers of bases than the other methods studied by Hesameddini and Shahbazi (2018); Jabari Sabeg et al. (2017); Najafalizadeh and Ezzati (2016).
References
Abbas S, Benchohra M (2014) Fractional order integral equations of two independent variables. Appl Math Comput 227:755–761
Ahmed E, Elgazzar AS (2007) On fractional order differential equations model for nonlocal epidemics. Phys A 379(2):607–614
Amin R, Shah K, Asif M, Khan I, Ullah F (2021) An efficient algorithm for numerical solution of fractional integro-differential equations via Haar wavelet. J Comput Appl Math 381:113028
Aminikhah H, Sheikhani AHR, Houlari T, Rezazadeh H (2017) Numerical solution of the distributed-order fractional Bagley–Torvik equation. J Autom Sin epub 6(3):760–765
Atanackovic TM, Stankovic B (2004) On a system of differential equations with fractional derivatives arising in rod theory. J Phys A: Math Gen 37(4):1241
Chen W (2006) A speculative study of 2/3-order fractional Laplacian modeling of turbulence: some thoughts and conjectures. Chaos 16(2): Article ID 023126
Chen W, Sun H, Zhang X, Korosak D (2010) Anomalous diffusion modeling by fractal and fractional derivatives. Comput Math Appl 59(5):1754–1758
Cheney EW (1966) Introduction to approximation theory. McGraw-Hill, New York
Conway JB (2007) A course in functional analysis. Springer, Berlin
Dahaghin MS, Hassani H (2017) An optimization method based on the generalized polynomials for nonlinear variable-order time fractional diffusion-wave equation. Nonlinear Dyn 88(3):1587–1598
Davis P (1975) Interpolation and approximation. Blaisdell, New York
Esmaeili SH, Shamsi M, Luchkob Y (2011) Numerical solution of fractional differential equations with a collocation method based on Müntz polynomials. Comput Math Appl 62:918–929
Evans RM, Katugampola UN, Edwards DA (2017) Applications of fractional calculus in solving Abel-type integral equations: surface-volume reaction problem. Comput Math Appl 73(6):1346–1362
Fathizadeh E, Ezzati R, Maleknejad K (2017) The construction of operational matrix of fractional integration using the fractional chebyshev polynomials. Int J Appl Comput Math 3(1):387–409
Hassani H, Avazzadeh Z, Tenreiro Machado JA (2019) Numerical approach for solving variable-order space-time fractional telegraph equation using transcendental Bernstein series. Eng Comput. https://doi.org/10.1007/s00366-019-00736-x
Hassani H, Naraghirad E (2019) A new computational method based on optimization scheme for solving variable-order time fractional Burgers’ equation. Math Comput Simul 162:1–17
Hassani H, Tenreiro Machado JA, Avazzadeh Z (2019a) An effective numerical method for solving nonlinear variable-order fractional functional boundary value problems through optimization technique. Nonlinear Dyn 97(4):2041–2054
Hassani H, Tenreiro Machado JA, Naraghirad E (2019b) Generalized shifted Chebyshev polynomials for fractional optimal control problems. Commun Nonlinear Sci Numer Simul 75:50–61
Hesameddini E, Shahbazi M (2018) Two-dimensional shifted Legendre polynomials operational matrix method for solving the two-dimensional integral equations of fractional order. Appl Math Comput 322:40–54
Jabari Sabeg D, Ezzati R, Maleknejad K (2017) A new operational matrix for solving two-dimensional nonlinear integral equations of fractional order. Cogent Math 4(1):1347017. https://doi.org/10.1080/23311835.2017.1347017
Kılıçman A, Al Zhour ZAA (2007) Kronecker operational matrices for fractional calculus and some applications. Appl Math Comput 187(1):250–265
Kreyszig E (1989) Introductory functional analysis with applications. Wiley, New York
Li Y, Shah K (2017) Numerical solutions of coupled systems of fractional order partial differential equations. Adv Math Phys. Article ID 1535826:1–14
Maleknejad K, Rashidinia J, Eftekhari T (2018) Numerical solution of three-dimensional Volterra–Fredholm integral equations of the first and second kinds based on Bernstein’s approximation. Appl Math Comput 339:272–285
Maleknejad K, Rashidinia J, Eftekhari T (2020a) Operational matrices based on hybrid functions for solving general nonlinear two-dimensional fractional integro-differential equations. Comp Appl Math 39:103. https://doi.org/10.1007/s40314-020-1126-8
Maleknejad K, Rashidinia J, Eftekhari T (2020b) Numerical solutions of distributed order fractional differential equations in the time domain using the Müntz-Legendre wavelets approach. Numer Methods Partial Differ Equ. https://doi.org/10.1002/num.22548
Maleknejad K, Rashidinia J, Eftekhari T (2020c) A new and efficient numerical method based on shifted fractional-order Jacobi operational matrices for solving some classes of two-dimensional nonlinear fractional integral equations. Submitted to Numerical Methods for Partial Differential Equations
Mashoof M, Refahi Shekhani AH (2017) Simulating the solution of the distributed order fractional differential equations by block-pulse wavelets. UPB Sci Bull Ser A Appl Math Phys 79:193–206
Mirzaee F, Samadyar N (2019) Numerical solution based on two-dimensional orthonormal Bernstein polynomials for solving some classes of two-dimensional nonlinear integral equations of fractional order. Appl Math Comput 344–345:191–203
Mohammadi Rick S, Rashidinia J (2019) Solving fractional diffusion equations by Sinc and radial basis functions. Asian-Eur J Math 2050101. https://doi.org/10.1142/S1793557120501016
Najafalizadeh S, Ezzati R (2016) Numerical methods for solving two-dimensional nonlinear integral equations of fractional order by using two-dimensional block pulse operational matrix. Appl Math Comput 280:46–56
Nouri K, Torkzadeh L, Mohammadian S (2018) Hybrid Legendre functions to solve differential equations with fractional derivatives. Math Sci 12:129–136
Permoon MR, Rashidinia J, Parsa A, Haddadpour H, Salehi R (2016) Application of radial basis functions and sinc method for solving the forced vibration of fractional viscoelastic beam. J Mech Sci Technol 30(7):3001–3008
Podlubony I (1999) Fract Diff Equ. Academic Press, San Diego
Pourbabaee M, Saadatmandi A (2019) A novel Legendre operational matrix for distributed order fractional differential equations. Appl Math Comput 361:215–231
Rahimkhani P, Ordokhani Y, Babolian E (2018) M\({\ddot{u}}\)ntz-Legendre wavelet operational matrix of fractional-order integration and its applications for solving the fractional pantograph differential equations. Numer Algor 77:1283–1305
Rossikhin YA, Shitikova MV (1997) Application of fractional derivatives to the analysis of damped vibrations of viscoelastic single mass systems. Acta Mech 120(1):109–125
Saeedi H, Mohseni Moghadam M (2011) Numerical solution of nonlinear Volterra integro-differential equations of arbitrary order by CAS wavelets. Commun Nonlinear Sci Numer Simul 16:1216–1226
Samadyar N, Mirzaee F (2019) Numerical scheme for solving singular fractional partial integro-differential equation via orthonormal Bernoulli polynomials. Int J Num Model 32(6):e2652
Shah K, Wang J (2019) A numerical scheme based on non-discretization of data for boundary value problems of fractional order differential equations. RACSAM 113:2277–2294
Sun HG, Chen W, Chen YQ (2009) Variable-order fractional differential operators in anomalous diffusion modeling. Phys A 388(21):4586–4592
Sun HG, Chen D, Zhang Y, Chen L (2015) Understanding partial bed-load transport: experiments and stochastic model analysis. J Hydrol 521:196–204
Zalp N, Demirci E (2011) A fractional order SEIR model with vertical transmission. Math Comput Model 54(1–2):1–6
Zeidler E (1995) Applied functional analysis: applications to mathematical physics. Appl Math Sci 108
Zhu L, Fan Q (2012) Solving fractional nonlinear Fredholm integro-differential equations by the second kind Chebyshev wavelet. Commun Nonlinear Sci Numer Simul 17:2333–2341
Acknowledgements
The authors express their sincere thanks to the reviewer for his valuable comments and suggestions that improved the content of the paper.
Author information
Authors and Affiliations
Corresponding author
Additional information
Communicated by José Tenreiro Machado.
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Maleknejad, K., Rashidinia, J. & Eftekhari, T. Existence, uniqueness, and numerical solutions for two-dimensional nonlinear fractional Volterra and Fredholm integral equations in a Banach space. Comp. Appl. Math. 39, 271 (2020). https://doi.org/10.1007/s40314-020-01322-4
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1007/s40314-020-01322-4
Keywords
- Two-dimensional nonlinear fractional Volterra and Fredholm integral equations
- Existence and uniqueness
- Banach space
- Hybrid functions
- Operational matrices
- Collocation method
- Convergence analysis