
Abstract
In this paper, we introduce a semi-analytical method called the local fractional Laplace homotopy analysis method (LFLHAM) for solving wave equations with local fractional derivatives. The LFLHAM is based on the homotopy analysis method and the local fractional Laplace transform method, respectively. The proposed analytical method was a modification of the homotopy analysis method and converged rapidly within a few iterations. The nonzero convergence-control parameter was used to adjust the convergence of the series solutions. Three examples of non-differentiable wave equations were provided to demonstrate the efficiency and the high accuracy of the proposed technique. The results obtained were completely in agreement with the results in the existing methods and their qualitative and quantitative comparison of the results.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction
Historically, more than two hundred years many problems in mathematical biology, plasma physics, analytical chemistry, finance, quantum mechanics, and many other applications in science and engineering were formulated using the fractional calculus (Losada and Nieto 2015; Caputo and Fabrizio 2015; Atangana and Baleanu 2016; Atangana and Koca 2016; Algahtani 2016; Raja et al. 2015, 2016; Atangana 2016; Mandelbrot and Van Ness 1968; Atangana and Gómez-Aguilar 2017; Jumarie 2001, 2005a, b, 2009; Baleanu et al. 2010) The origin of fractional calculus was dated back to the work of the German mathematician Gottfried Wilhelm Leibniz in 1695 (see Oldham and Spanier 1974). The theory of fractional calculus can easily be used to study the memory effects of dynamic systems, and have the embedded efficiency to described these systems in the best way. Unfortunately, the concept of classical fractional calculus cannot be used to study some continuous dynamical systems with highly irregular surfaces and curves (Kolwankar and Gangal 1998). These dynamics systems are continuous but nowhere differentiable and arise naturally in many fields of physical science and engineering (Kolwankar and Gangal 1997). To overcome the limitations of classical fractional calculus, the concept of local fractional calculus was introduced by Kolwankar and Gangal (1996). The local fractional calculus is a modification of classical calculus and is suitable to study the behavior of these dynamics systems with highly irregular curves and surfaces (non-differentiable).
In recent years, there is a rapid development on the concept of local fractional calculus (see Yang 2011a, 2012; Yang et al. 2010, 2013a, b, 2014a, b, 2016a, b, c, 2017a, b, c, d, 2018; Hemeda et al. 2018; Ming-Sheng et al. 2012; Zhao et al. 2017; Wang et al. 2014; Chen et al. 2010; Golmankhaneh et al. 2015; Singh et al. 2016; Liu et al. 2014; Srivastava et al. 2014; Jafari et al. 2015a; Kumar et al. 2017a, b). Based on the current development, many numerical and analytical techniques such as local fractional Adomian decomposition method (Yan et al. 2014), the local fractional variational iteration method (Yang et al. 2013c, 2014c; Jafari and Kamil 2015; Jafari et al. 2015b), the local fractional homotopy perturbation method (Yang et al. 2015a; Zhang et al. 2015), the local fractional homotopy perturbation Sumudu transform method (Ziane et al. 2017), and the local fractional Laplace decomposition method (Jassim 2015) have been proposed and successfully applied to various applications.
The main aim of this present paper is to introduce an efficient numerical method which is a combination of homotopy analysis method (Liao 1995, 2003, 2005, 2010) and the local fractional Laplace transform (Yang 2011b; Yang et al. 2015b) for solving wave equations involving local fractional derivatives arising in physical sciences and engineering. The efficiency and the high accuracy of the method are demonstrated. The most significant novel features of the proposed scheme are as follows:
-
The proposed scheme can be applied directly without any linearization, transformations, discretizations of variables, or taking some restrictive assumptions.
-
The LFLHAM reduces the computational size and errors.
-
It is a semi-analytical method which provides an exact or approximate solution.
-
The LFLHAM avoids the cumbersome steps of some computational methods.
-
The proposed technique can easily be applied to nonlinear local fractional partial differential equations.
-
The cornerstone of the LFLHAM is the nonzero convergence-control parameter which provides us with a convenient way to guarantee the convergence of the series solutions.
The paper is organized as follows. In Sect. 2, some preliminaries of local fractional calculus and local fractional Laplace transform are presented. The basic idea of the homotopy analysis is presented in Sect. 3. Section 4 described the analysis and convergence of the local fractional Laplace homotopy analysis method. In Sect. 5 some applications of the LFLHAM are presented, and finally, in Sect. 6 conclusions of this paper are discussed. In Table 1, we presented some useful identities of the local fractional calculus.
2 Preliminaries of local fractional calculus
Definition 1
Let \(\phi : \mathfrak {I}\rightarrow \aleph \) be a function defined on fractal set \(\mathfrak {I}\) of fractal dimension \(\alpha \) say \((0<\alpha <1)\). Then a real-valued function on a fractal set \(\mathfrak {I}\) is defined as (Yang 2011a, 2012)
where \(t^\theta \in \mathfrak {I}\) and \(0<\theta <1\).
Definition 2
The function \(\xi (t)\) is local fractional continuous at \(t=t_0\) if it is valid for (Yang 2011a, 2012)
with \(|t-t_0|<\delta \), for \(\varepsilon >0\) and \(\varepsilon \in \mathbb {R}\) For \(t\in (a,b)\), the function \(\xi (t)\in C_\theta (a,b)\) is called local fractional continuous on the interval (a, b).
Definition 3
(Local fractional derivative) The local fractional derivative of the function \(\xi (t)\) of order \(\theta \) at \(t=t_0\) is defined as (Yang 2011a, 2012)
where
Similarly, for any \(t\in (a,b)\), there exists,
which is denoted by
The local fractional derivatives of higher order is written as (Yang 2011a, 2012)
The local fractional partial derivative of higher order is written as (Yang 2011a, 2012)
Definition 4
(Local fractional integral) The local fractional integral of the function \(\xi (t)\) of order \(\theta \) in the interval \([\alpha , \beta ]\) is defined as (Yang 2011a, 2012)
where \(\varDelta _{\tau i}=\tau _{i+1}-\tau _i,\,\,\varDelta _\tau =\max \{\varDelta _{\tau 0},\varDelta _{\tau 1},\varDelta _{\tau 2},\ldots \}\), \(\tau _0=\alpha ,\,\,\tau _N=\beta \), and \(\{\tau _0,\tau _1,\dots ,\tau _N\}\) is a partition of the interval \([\alpha , \beta ].\)
Definition 5
(Local fractional Laplace transform) The local fractional Laplace transform of the function \(\xi (t)\) of local fractional order \(\theta \) is defined as (Yang 2011b; Yang et al. 2015b)
where \(\pounds _\theta \) is called the local fractional Laplace transform operator.
The sufficient condition for the convergence of Eq. (10) is given by
Definition 6
The inverse local fractional Laplace transform is defined as
Definition 7
The nth derivative of local fractional Laplace transform is defined as (Yang 2011b; Yang et al. 2015b)
Definition 8
The Riemann–Liouville fractional integral operator of order \(\alpha >0\), of a function \(f(t)\in C^m_\tau ,\) and \(\tau \ge -1\) is defined as (Oldham and Spanier 1974).
Below we list some important properties of \(I^{\alpha }\) (see Oldham and Spanier 1974):
-
(i)
If \(f\in C_\tau ,\,\,\tau \ge -1,\,\alpha ,\,\beta \,\ge 0\), and \(\gamma >-1\), then
$$\begin{aligned} I^{\theta }t^x= & {} \frac{\varGamma (x+1)}{\varGamma (x+\theta +1)}t^{\theta +x}, \end{aligned}$$(14)$$\begin{aligned} I^{\theta }I^{\beta }f(t)= & {} I^{\theta +\beta },\quad I^{\theta }I^{\beta }f(t)=I^{\beta }I^{\theta }f(t). \end{aligned}$$(15) -
(ii)
For \(m-1<\alpha \le m,\,\,m\in \mathbb {N}\) and \(f\in C^{m}_\tau ,\,\,\tau \ge -1\), then
$$\begin{aligned} D^\theta I^{\theta }f(t)=f(t),\quad I^\theta D^{\theta }f(t)=f(t)-\sum _{i=0}^{m-1}f^k(0^+)\frac{t^k}{k!},\quad t>0. \end{aligned}$$(16)
Definition 9
The function f(t) in Caputo fractional derivative is defined as (Oldham and Spanier 1974).
where \(m-1<\theta <m,\,m\in \mathbb N, t>0.\)
Definition 10
(Some useful results in fractal space) In Table 1 below we defined some important identities on fractal space.
In the next section, we illustrate the fundamental idea of the standard HAM.
3 Basic idea of homotopy analysis method
In this section, we illustrate the basic idea of homotopy analysis method. Consider the following nonlinear local fractional partial differential equation
where N is the nonlinear operator, x and t denotes the independent variables, and u(x, t) denotes the local fractional unknown function. For clarity, in this paper we ignore all initial and boundary conditions, which can be computed in the same way. Based on the fundamental of the traditional homotopy analysis method proposed by Liao (1995), we construct a convex non-differentiable homotopy called the zero-order deformation equation
where \(p\in [0,1]\) is an embedding parameter, \(\hslash \ne 0\) is the nonzero convergence-control parameter, and \(H(x,t)\ne 0\) is the local fractional nonzero auxiliary function, \(\varphi (x,t;p)\) is the local fractional unknown function, \(u_0(x,t)\) is an initial guess of u(x, t), and \(\pounds =\frac{\partial ^\theta \varphi }{\partial t^\theta }\) is the linear local fractional operator with the property that
where C is an integral constant. Based on the concept of homotopy analysis method, one has great freedom to choose the auxiliary linear operator and the initial guess. Obviously, when \(p=1\), and \(p=0\), it holds
respectively. Thus, as p increases from 0 to 1, the solution \(\varphi (x,t;p)\) varies from the initial guess \(u_0(x,t)\) to the solution u(x, t). Expanding \(\varphi (x,t;p)\) using Taylor series with respect to p, we deduce
where
If the auxiliary linear operator, the initial guess, the auxiliary function, and the convergence-control parameter are chosen properly, then Eq. (22) converges at \(p=1\), and
is the solution of the original problem Eq. (22). According to Eq. (22), the governing equation can be deduced from the zero deformation Eq. (19).
Define a local fractional vector
Differentiating Eq. (19) m-times with respect to the embedding parameter p and then setting \(p=0\) and finally dividing by m!, we obtain the so-called Mth-order deformation equation
where
and
Using symbolic computational software such as Mathematica or Maple, we can easily solve the Mth-order deformation equation.
In the next section, we demonstrate the idea of the LFLHAM.
4 Local fractional Laplace homotopy analysis method
Consider the following nonlinear local fractional partial differential equation
where \(\varPi _\theta \xi (x,t)=\frac{\partial ^{m\theta }\xi (x,t)}{\partial t^{m\theta }}\) denotes the linear local fractional differential, \(R_\theta \xi (x,t)\) denotes the remaining linear operator, and \(\psi (x,t)\) states the non-homogeneous function of x and t which is the source term.
Computing the local fractional Laplace transform on both sides of Eq. (29), we get
Applying Eq. (12) on Eq. (30), we obtain
Equivalently
We define the nonlinear operator as
where \(p \in [0,1]\) is a nonzero auxiliary parameter, and \(\vartheta (x,t;p)\) is a real-valued function of \(x,\,t,\,p\). We construct a homotopy as follows:
where \(\pounds _\theta \) denotes the local fractional Laplace transform, \(p \in [0,1]\) is the embedding parameter, H(x, t) denotes a nonzero auxiliary function, \(\hslash \ne 0\) is an auxiliary parameter, \(\xi _0(x,t)\) is the initial guess of \(\xi (x,t)\), and \(\eta (x,t;p)\) is the unknown function.
The greatest advantage of the LFLHAM is the great freedom to choose auxiliary parameter, and the initial guess. Obviously, when \(p=1\), and \(p=0\) in Eq. (34), the following results holds
respectively. Thus, as p increases from 0 to 1, the solution \(\eta (x,t;p)\) varies from the initial guess \(\xi _0(x,t)\) to the solution \(\xi (x,t)\). Expanding \(\eta (x,t;p)\) as a local fractional Taylor series (Yang 2011a, 2012) with respect to p, we deduce
where
The convergence of the series solutions of Eq. (36) is control by the convergence-control parameter \(\hslash \). If the auxiliary linear operator, the initial guess, the auxiliary parameter \(\hslash \), auxiliary function are chosen properly, then Eq. (36) converges at \(p=1\), and
is the solution of the original problem Eq. (29). According to Eq. (37), the governing equation can be deduced from the zero deformation Eq. (34).
Define the vectors
Differentiating Eq. (34) m-times with respect to the embedding parameter p and then setting \(p=0\) and finally dividing by \(\varGamma (m+1)\), we have the so-called Mth-order deformation equation
where
and
Taking the inverse local fractional Laplace transform on both sides of Eq. (40), we get
And based on Eq. (29), our \(R_m({\varvec{\xi }}_{m-1})\) is define as
Thus, using Eq. (40), we can easily compute \(v_m(x,t)\) for \(m\ge 1,\) and at Mth-order we deduce
In the next theorem, we study the convergence analysis of the original problem Eq. (29).
Theorem 1
(Convergence of analysis of the LFLHAM) Suppose the series
is converging to \(\zeta (x,t)\), where \(\xi _m(x,t)\) is obtained through Eq. (40). Then \(\xi (x,t)\) must be the exact solution of Eq. (29).
Proof
Since
Then we deduce that \(\lim _{M\rightarrow \infty }\sum _{m=1}^{M}\xi _m(x,t)=0\). Thus, using Eq. (40), yields
On the other hand, since \(H(x,t)\ne 0\), \(\hslash \ne 0\) and the linearity property of Eq. (34), we deduce
Thus, based on Eq. (44), we get
Hence, Eq. (49) proved that \(\zeta (x,t)\) satisfies the solution of the original problem Eq. (29). \(\square \)
5 Applications of the LFLHAM
In this section, we illustrate the applications of the local fractional Laplace homotopy analysis method to show its efficiency and the high accuracy.
Example 1
Consider the following local fractional wave equation
subject to the initial conditions
Applying Eqs. (10) and (12) on both sides of Eq. (50), we deduce
The nonlinear operator is defined as
Thus
The Mth-order deformation equation is defined as
Computing the inverse local fractional Laplace transform of Eq. (55), we obtain
Choosing \(H(x,t)=1\), we solve Eq. (56) recursively for \(m\ge 1\) and obtain the following results:
and so on.
Thus, the series solutions of Eq. (50) are given by
In particular, choosing the convergence-control parameter \(\hslash =- \ 1\), we obtain
The result obtained in Eq. (58) is in complete agreement with the local fractional integral iterative method and the local fractional new iterative method (Hemeda et al. 2018), local fractional functional decomposition method (Wang et al. 2014) and (Yang 2011a, 2012).
Using the standard HAM spproach Equation (50) can be written as
For simplicity, one has
which yields according to Eq. (16)
We obtain the initial guess by neglecting the unknown term in the R.H.S. of Eq. (61) as
Let the linear operator be \(\pounds (\varphi )=\frac{\partial ^{2\theta } \xi (x,t)}{\partial t^{2\theta }}\).
We define the nonlinear operator as
According to Eqs. (19) and (20), we deduce
where
Then using the property of Eqs. (16) and (51), and setting \(H(x,t)=1\), we obtain
Finally, using Eqs. (51) and (66), we easily obtain the remaining components as

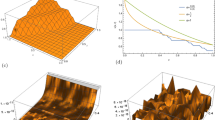
a Numerical simulation of Eq. (50) for \(\theta =\frac{1}{2}\), b 3D surface solution for \(\theta =1\), c 3D non-differentiable surface solution for \(\theta =\frac{\ln (2)}{\ln (3)}\), d 2D approximate solutions for \(\theta =1,\frac{1}{2}\) and \(\frac{\ln (2)}{\ln (3)}\), e absolute error \(E_{10}(\xi (x,t))=|\xi _{\text {ext.}}(x,t)-\xi _{\text {appr.}}(x,t)|\), f absolute error \(E_{20}(\xi (x,t))=|\xi _{\text {ext.}}(x,t)-\xi _{\text {appr.}}(x,t)|\), g absolute error of LFLHAM \(E_{20}(\xi (x,t))=|\xi _{\text {ext.}}(x,t)-\xi _{\text {appr.}}(x,t)|\) when \(\theta =\frac{\ln (2)}{\ln (3)}\), h absolute error of HAM \(E_{20}(\xi (x,t))=|\xi _{\text {ext.}}(x,t)-\xi _{\text {appr.}}(x,t)|\) when \(\theta =\frac{\ln (2)}{\ln (3)}\)
Figure 1: The 3D surface solution of Eq. (50) for \(\theta =\frac{1}{2}\) is presented in Fig. 1a. The surface solution of Eq. (34) for \((\theta =1)\) is depicted in Fig. 1b. The non-differentiable surface solution is depicted in Fig. 1c. The surface solution behavior of \(\xi (x,t)\) for different values of \(\theta =1,\frac{1}{2},\frac{\ln (2)}{\ln (3)}\) is presented in Fig. 1d. The absolute error analysis for 20th-order approximations of the LFLHAM and HAM is presented in Fig. 1e, f. In Fig. 1g, h, the absolute error analyses of 20th-order approximations of the non-differentiable problem for \(\theta =\frac{\ln (2)}{\ln (3)}\) are clearly illustrated. The results of the absolute errors are in excellent agreement.
Example 2
Consider the following local fractional wave equation
subject to the initial conditions
Employing Eqs. (10) and (12) on both sides of Eq. (68), we get
The nonlinear operator is defined as
Thus
The Mth-order deformation equation is defined as
Computing the inverse local fractional Laplace transform of Eq. (73), we deduce
Choosing \(H(x,t)=1\), we solved Eq. (74) for \(m\ge 1\) and obtained the following results:
and so on.
Thus, the series solutions of Eq. (68) is given by
Setting the convergence-control parameter \(\hslash =-1\), we obtain
The result obtained in Eq. (76) is in complete agreement with the local fractional integral iterative method and the local fractional new iterative method (Hemeda et al. 2018), local fractional functional decomposition method (Wang et al. 2014), and (Yang 2011a, 2012).

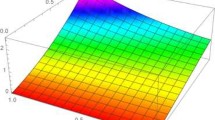
a Numerical simulation of Eq. (68) for \(\theta =\frac{1}{2}\), b 3D surface solution for \(\theta =1\), c 3D non-differentiable surface solution behavior for \(\theta =\frac{\ln (2)}{\ln (3)}\), d 2D approximate solutions for \(\theta =1,\frac{1}{2}\) and \(\frac{\ln (2)}{\ln (3)}\), e absolute error \(E_{10}(\xi (x,t))=|\xi _{\text {ext.}}(x,t)-\xi _{\text {appr.}}(x,t)|\), f absolute error \(E_{20}(\xi (x,t))=|\xi _{\text {ext.}}(x,t)-\xi _{\text {appr.}}(x,t)|\), g absolute error of the LFLHAM \(E_{20}(\xi (x,t))=|\xi _{\text {ext.}}(x,t)-\xi _{\text {appr.}}(x,t)|\) for \(\theta =\frac{\ln (2)}{\ln (3)}\), h absolute error of the HAM \(E_{20}(\xi (x,t))=|\xi _{\text {ext.}}(x,t)-\xi _{\text {appr.}}(x,t)|\) for \(\theta =\frac{\ln (2)}{\ln (3)}\)
Figure 2: Surface solution of Eq. (68) for \(\theta =\frac{1}{2}\) is given in Fig. 2a. Surface solution behavior of Eq. (68) for \((\theta =1)\) is presented in Fig. 2b. The non-differentiable surface solution behavior is depicted in Fig. 2c. The 2D surface solution behavior for different values of \(\theta =1,\frac{1}{2},\frac{\ln (2)}{\ln (3)}\) is presented in Fig. 2d. The absolute error analysis for 20th-order approximations of the LFLHAM and HAM is given in Fig. 2e, f. The 20th-order absolute of the non-differentiable problem for \(\theta =\frac{\ln (2)}{\ln (3)}\) is presented in Fig. 2g, h, respectively. The absolute error analyses of the LFLHAM and HAM were in complete agreement.
Example 3
Consider the following local fractional wave equation:
subject to the initial conditions
Applying Eqs. (10) and (12) on both sides of Eq. (77) yields
The nonlinear operator is defined as
Thus
The Mth-order deformation equation is defined as
Computing the inverse local fractional Laplace transform of Eq. (82), we deduce
Choosing \(H(x,t)=1\), we solved Eq. (83) for \(m\ge 1\) and obtained the following approximations:
and so on. Thus, the series solutions of Eq. (77) is given by
Choosing the convergence-control parameter \(\hslash =-1\), we obtain
The result obtained in Eq. (85) is in complete agreement with the local fractional integral iterative method and the local fractional new iterative method (Hemeda et al. 2018), local fractional functional decomposition method (Wang et al. 2014; Yang 2011a, 2012).

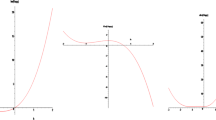
a Numerical solution of Eq. (85) for \(\theta =\frac{1}{2}\), b the 3D surface solution for \(\theta =1\), c the non-differentiable surface solution behavior for \(\theta =\frac{\ln (2)}{\ln (3)}\), d the approximate solutions for \(\theta =1,\frac{1}{2}\) and \(\frac{\ln (2)}{\ln (3)}\), e absolute error \(E_{10}(\xi (x,t))=|\xi _{\text {ext.}}(x,t)-\xi _{\text {appr.}}(x,t)|\), f absolute error \(E_{20}(\xi (x,t))=|\xi _{\text {ext.}}(x,t)-\xi _{\text {appr.}}(x,t)|\), g absolute error of the LFLHAM \(E_{20}(\xi (x,t))=|\xi _{\text {ext.}}(x,t)-\xi _{\text {appr.}}(x,t)|\) for \(\theta =\frac{\ln (2)}{\ln (3)}\), h absolute error of the HAM \(E_{20}(\xi (x,t))=|\xi _{\text {ext.}}(x,t)-\xi _{\text {appr.}}(x,t)|\) for \(\theta =\frac{\ln (2)}{\ln (3)}\)
Figure 3: The surface solution behavior of Eq. (68) for \(\theta =\frac{1}{2}\) is presented in Fig. 3a. Surface solution behavior of Eq. (68) for \((\theta =1)\) is illustrated in Fig. 3b. The non-differentiable surface solution behavior for \(\theta =\frac{\ln (2)}{\ln (3)}\) is depicted in Fig. 3c. 2D surface solutions for different values of \(\theta =1,\frac{1}{2},\frac{\ln (2)}{\ln (3)}\) are presented in Fig. 3d. The absolute error analysis for 20th-order approximations of the LFLHAM and HAM are given in Fig. 3e, f, respectively. The 20th-order absolute error analysis of the non-differentiable problem for \(\theta =\frac{\ln (2)}{\ln (3)}\) are depicted in Fig. 3g, h, respectively. The obtained results were in complete agreement.
Example 4
Consider the following nonlinear local fractional heat equation:
subject to the initial conditions
Employing Eqs. (10) and (12) on both sides of Eq. (86) yields
The nonlinear operator is defined as
Thus
The Mth-order deformation equation is defined as
Computing the inverse local fractional Laplace transform of Eq. (91), we obtain
Setting \(H(x,t)=1\), we solved Eq. (92) for \(m\ge 1\) and obtained the following results:
and so on. Thus, the series solutions of Eq. (86) is given by
Choosing the convergence-control parameter \(\hslash =-1\), we obtained the following result:

a Surface solution of Eq. (86) for \(\theta =\frac{1}{2}\), b 3D surface solution for \(\theta =1\), c non-differentiable surface solution behavior for \(\theta =\frac{\ln (2)}{\ln (3)}\), d the approximate solutions for \(\theta =1,\frac{1}{2}\) and \(\frac{\ln (2)}{\ln (3)}\), e absolute error \(E_{10}(\xi (x,t))=|\xi _{\text {ext.}}(x,t)-\xi _{\text {appr.}}(x,t)|\), f absolute error \(E_{20}(\xi (x,t))=|\xi _{\text {ext.}}(x,t)-\xi _{\text {appr.}}(x,t)|\), g absolute error of the LFLHAM \(E_{20}(\xi (x,t))=|\xi _{\text {ext.}}(x,t)-\xi _{\text {appr.}}(x,t)|\) for \(\theta =\frac{\ln (2)}{\ln (3)}\), h absolute error of the HAM \(E_{20}(\xi (x,t))=|\xi _{\text {ext.}}(x,t)-\xi _{\text {appr.}}(x,t)|\) for \(\theta =\frac{\ln (2)}{\ln (3)}\)
Figure 4: The surface solution behavior of Eq. (86) for \(\theta =\frac{1}{2}\) is presented in Fig. 4a. Solution behavior of Eq. (86) for \((\theta =1)\) is presented in Fig. 4b. The non-differentiable surface solution behavior is illustrated in Fig. 4c. The 2D surface solutions behavior for different values of \(\theta =1,\frac{1}{2},\frac{\ln (2)}{\ln (3)}\) are depicted in Fig. 4d. The absolute error analysis of 20th-order approximations of the LFLHAM and HAM are given in Fig. 4e, f, respectively. Absolute of the LFLHAM and HAM of 20th-order approximations of the non-differentiable problem for \(\theta =\frac{\ln (2)}{\ln (3)}\) are presented in Fig. 4g, h, respectively. The absolute errors obtained were in excellent agreement.
6 Conclusion
In this letter, we proposed an efficient computational technique called the local fractional Laplace homotopy analysis method (LFLHAM) for solving local fractional wave equations on Cantor set. The proposed technique reduces the computational size, and the series solutions converge rapidly. The greatest advantage of the LFLHAM over the existing techniques is the freedom of choosing the initial guess and the existence of the nonzero convergence-control parameter used to adjust and control the convergence of the method. We discussed the detailed convergence analysis of the method. Finally, based on the mathematical formulations and findings of LFLHAM in this paper, we conclude that it is highly efficient and user-friendly. In further research, one may intend to look for computational heuristic paradigms based on artificial intelligence algorithms to solve non-differentiable wave equations on Cantor sets. Besides, the proposed algorithm can also be treated as sequence of small intervals (i.e., step size) in the future.
References
Algahtani OJJ (2016) Comparing the Atangana–Baleanu and Caputo–Fabrizio derivative with fractional order: Allen Cahn model. Chaos Solitons Fract 89:552–559
Atangana A (2016) On the new fractional derivative and application to nonlinear Fisher’s reaction–diffusion equation. Appl Math Comput 273:948–956
Atangana A, Baleanu D (2016) New fractional derivatives with non-local and non-singular kernel: theory and application to heat transfer model. Therm Sci 20(2):763–769
Atangana A, Gómez-Aguilar JF (2017) Numerical approximation of Riemann–Liouville definition of fractional derivative: from Riemann–Liouville to Atangana–Baleanu. Numer Methods Partial Differ Equ. https://doi.org/10.1002/num.22195
Atangana A, Koca I (2016) Chaos in a simple nonlinear system with Atangana–Baleanu derivatives with fractional order. Chaos Solitons Fract 89:447–454
Baleanu D, Güvenc ZB, Tenreiro, Machado JA (2010) New trends in nanotechnology and fractional calculuc applications. Springer, Berlin
Caputo M, Fabrizio M (2015) A new definition of fractional derivative without singular kernel. Progr Fract Differ Appl 2:731–85
Chen Y, Yan Y, Zhang K (2010) On the local fractional derivative. J Math Anal Appl 362:17–33
Golmankhaneh AK, Yang XJ, Baleanu D (2015) Einsten field equations within local fractional calculus. Rom J Phys 60:22–31
Hemeda AA, Eladdad EE, Lairje IA (2018) Local fractional analytical methods for solving wave equations with local fractional derivative. Math Methods Appl Sci. https://doi.org/10.1002/mma.4756
Hu M-S, Ravi PA, Yang XJ (2012) Local fractional Fourier series with applications to wave equation in fractal vibrating string. Abstr Appl Anal 2012:1–15 (article ID: 567401)
Jafari H, Kamil HJ (2015) Local fractional variational iteration method for solving nonlinear partial differential equations within local fractional operators. Appl Appl Math Int J 10(2):1055–1065
Jafari H, Tajadodi H, Johnston SJ (2015a) A decomposition method for solving diffusion equationa via local fractional time derivative. Therm Sci 19(1):S123–S129
Jafari H, Ünlü C, Moshoa SP, Khalique CM (2015b) Local fractional Laplace variational iteration method for solving diffusion and wave equations on Cantor sets within local fractional operators. Entropy 2015:1–9 (article ID: 309870)
Jassim HK (2015) Local fractional Laplace decomposition method for nonhomogeneous heat equation arising in fractal heat flow with local fractional derivative. Int J Adv Appl Math Mech 2:1–7
Jumarie G (2001) Fractional master equation: non-standard analysis and Liouville–Riemann derivative. Chaos Solitons Fract 12:2577–2587
Jumarie G (2005a) On the solution of the stochastic differential equation of exponential growth driven by fractional Brownian motion. Appl Math Lett 18:817–826
Jumarie G (2005b) On the representation of fractional Brownian motion as an integral with respect to \((dt)^a\). Appl Math Lett 18:739–748
Jumarie G (2009) Laplace’s transform of fractional order via Mittag–Leffler function and modified Riemann–Liouville derivative. Appl Math Lett 22:1659–1664
Kolwankar KM, Gangal AD (1996) Fractional differentiability of nowhere differentiable functions and dimensions. Chaos 6:505–513
Kolwankar KM, Gangal AD (1997) Hölder exponents of irregular signals and local fractional derivatives. Pramana J Phys 48:49–68
Kolwankar KM, Gangal AD (1998) Local fractional Fokker–Planck equation. Phys Rev Lett 80:214–217
Kumar D, Singh J, Mehmet HB, Bulut H (2017a) An effictive computational approach to local fractional telegraph equations. Nonlinear Sci Lett A 8(2):200–206
Kumar D, Singh J, Baleanu D (2017b) A hybrid computational approach for Klein–Gordon equations on Canto sets. Nonlinnear Dyn 87:511–517
Liao SJ (1995) An approximate solution technique not depending on small parameters: a special example. Int J Non-Linear Mech 30:371–380
Liao SJ (2003) Beyond perturbation: introduction to the homotopy analysis method. CRC Press, Boca Raton
Liao SJ (2005) Comparison between the homotopy analysis method and homotopy perturbation method. Appl Math Comput 169(2):1186–1194
Liao SJ (2010) An optimal homotopy-analysis approach for strongly nonlinear differential equations. Commun Nonlinear Sci Numer Simul 362:2003–2016
Liu K, Hu RJ, Cattani C, Xie GN, Yang XJ, Zhao Y (2014) Local fractional Z-transforms with applications to signals on Cantor sets. Abstr Appl Anal 2013:1–6 (article ID: 638648)
Losada J, Nieto JJ (2015) Properties of the new fractional derivative without singular kernel. Progr Fract Differ Appl 2(1):87–92
Mandelbrot BB, Van Ness JW (1968) Fractional Brownian motions, fractional noises and applications. SIAM Rev 10:422–437
Oldham KB, Spanier J (1974) The fractional calculus. Acadamic Press, New York
Raja MAZ, Manzar MA, Samar R (2015) An efficient computational intelligence approach for solving fractional order Riccati equations using ANN and SQP. Appl Math Model 39(10–11):3075–3093
Raja MAZ, Samar R, Manzar MA, Shah SM (2016) Design of unsupervised fractional neural network model optimized with interior point algorithm for solving Bagley–Torvik equation. Math Compute Simul. https://doi.org/10.1016/j.matcom.2016.08.002
Singh J, Kumar D, Nieto JJ (2016) A reliable algorithm for local fractional Tricomi equation arising in fractal transonic flow. Entropy 18:1–8
Srivastava HM, Golmankhaneh AK, Baleanu D, Yang XJ (2014) Local fractional Sumudu transform with application to IVPs on Cantor sets. Abstr Appl Anal 2014:1–7 (article ID: 176395)
Wang SQ, Yang YJ, Kamil HJ (2014) Local fractional function decomposition method for solving inhomogeneous wave equations with local fractional derivative. Abstr Appl Anal 2014(2014):1–7
Yan SP, Jafari H, Jassim HK (2014) Local fractional Adomian decomposition and function decomposition methods for Laplace equation within local fractional operators. Adv Math Phys 2014(2014):1–8
Yang XJ (2011a) Local fractional fucntional analysis and its applications. Asian Academic, Hong Kong
Yang XJ (2011b) Local fractional Laplace transform based on the local fractional calculus. In: Shen G, Huang X (eds) Advanced Research on computer science and information engineering (communications in computer and information science, vol 153. Springer, Berlin
Yang XJ (2012) Advance local fractional calculus and its applications. World Science Publisher, New York
Yang XJ, Kang Z, Liu C (2010) Local fractional Fourier’s transform based on local fractional calculus. In: The 2010 ICECE 2010. IEEE Computer Society, pp 1242–1245
Yang XJ, Baleanu D, Zhong WP (2013a) Approximate solutions for diffusion equations on Cantor space-time. Proc Rom Acad Ser A 14:127–133
Yang XJ, Srivastava HM, He JH, Baleanu D (2013b) Cantor-type cylindrical-coordinate fractional derivatives. Proc Rom Acad Ser A 14:127–133
Yang XJ, Baleanu D, Yang XJ (2013c) A local fractional variational iteration method for Laplace equation within local fractional operators. Abstr Appl Anal 2013:1–6 (article ID: 202650)
Yang AM, Zhang YZ, Cattani C, Xie GN, Rashidi MM, Zhou YJ, Yang XJ (2014a) Application of local fractional series expansion method to solve Klein–Gordon equations on Cantor sets. Abstr Appl Anal 2014:1–7
Yang XJ, Hristov J, Srivastava HM, Ahmad B (2014b) Modelling fractal waves on shallow water surfaces via local fractional Korteweg–de Vries equation. Abstr Appl Anal 2013:1–10 (article ID: 278672)
Yang AM, Li J, Srivastava HM, Xie GN, Yang XJ (2014c) Local fractional variational iteration method for solving linear partial differential equation with local fractional derivative. Discrete Dyn Nat Soc 2014:1–8 (article ID: 365981)
Yang XJ, Srivastava HM, Cattani C (2015a) Local fractional homotopy perturbation method for solving fractional partial differential equations arising in mathematical physics. Rom Rep Phys 67:752–761
Yang XJ, Baleanu D, Srivastava HM (2015b) Local fractional integral transforms and their applications. Academic Press, New York
Yang XJ, Tenreiro JAM, Baleanu D, Gao F (2016a) A new numerical technique for local fractional diffusion equation in fractal heat transfer. J Nonlinear Sci Appl 9:5621–5628
Yang XJ, Machado JT, Baleanu D, Cattani C (2016b) On exact traveling-wave solutions for local fractional Korteweg–de Vries equation. Chaos Interdiscip J Nonlinear Sci 26(8):084312
Yang XJ, Machado JA, Hristov J (2016c) Nonlinear dynamics for local fractional Burgers’ equation arising in fractal flow. Nonlinear Dyn 84(1):3–7
Yang XJ, Machado JT, Cattani C, Gao F (2017a) On a fractal LC-electric circuit modeled by local fractional calculus. Commun Nonlinear Sci Numer Simul 47:200–206
Yang XJ, Machado JAT, Baleanu D (2017b) Exact traveling-wave solution for local fractional Boussinesq equation in fractal domain. Fractals 25(4):1740006, 1-7
Yang XJ, Gao F, Srivastava HM (2017c) Exact travelling wave solutions for the local fractional two-dimensional Burgers-type equations. Comput Math Appl 73(2):203–210
Yang XJ, Machado JA, Nieto JJ (2017d) A new family of the local fractional PDEs. Fundam Inform 151(1–4):63–75
Yang XJ, Gao F, Srivastava HM (2018) A new computational approach for solving nonlinear local fractional PDEs. J Comput Appli Math 339:285–296
Zhang Y, Cattani C, Yang XJ (2015) Local fractional homotopy perturbation method for solving non-homogeneous heat conduction equations in fractal domains. Entropy 17:6753–6764
Zhao D, Singh J, Kumar D, Rathore S, Yang XJ (2017) An efficient computational technique for local fractional heat conduction equation in fractal media. J Nonlinear Sci Appl 10:1478–1486
Ziane D, Baleanu D, Belghaba K, Cherif M (2017) Local fractional Sumudu decomposition method for linear partial differential equations with local fractional derivative. J King Saud Univ Sci. https://doi.org/10.1016/j.jksus.2017.05.002
Acknowledgements
Funding was provided by China Scholarship Council (2017GXZ025381), National Natural Science Foundation of China (11571206).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Additional information
Communicated by José Tenreiro Machado.
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Maitama, S., Zhao, W. Local fractional Laplace homotopy analysis method for solving non-differentiable wave equations on Cantor sets. Comp. Appl. Math. 38, 65 (2019). https://doi.org/10.1007/s40314-019-0825-5
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1007/s40314-019-0825-5
Keywords
- Local fractional Laplace homotopy analysis method
- Local fractional wave equations
- Local fractional Laplace transform
- Homotopy analysis method
- Numeric and symbolic computations