
Abstract
In this work, we propose a modified inertial and forward–backward splitting method for solving the fixed point problem of a quasi-nonexpansive multivalued mapping and the inclusion problem. Then, we establish the weak convergence theorem of the proposed method. The strongly convergent theorem is also established under suitable assumptions in Hilbert spaces using the shrinking projection method. Some preliminary numerical experiments are tested to illustrate the advantage performance of our methods.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Let H be a real Hilbert space with inner product \(\langle \cdot ,\cdot \rangle \) and norm \(\Vert \cdot \Vert \), respectively. Let CB(H) and K(H) denote the families of nonempty closed bounded subsets and nonempty compact subsets of H, respectively. The Hausdorff metric on CB(H) is defined by the following:
for all \(A,B \in CB(H)\), where \(d(x,B)=\inf _{b\in B}\Vert x-b\Vert \). A single-valued mapping \(T:H\rightarrow H\) is said to be nonexpansive if
for all \(x,y\in H\). A multivalued mapping \(T:H\rightarrow CB(H)\) is said to be nonexpansive if
for all \(x,y\in H\). An element \(z\in H\) is called a fixed point of \(T:H\rightarrow H\) (resp., \(T:H \rightarrow CB(H)\)) if \(z=Tz\) (resp., \(z\in Tz\)). The fixed point set of T is denoted by F(T). If \(F(T)\ne \emptyset \) and
for all \(x\in H\) and \(p\in F(T)\), then T is said to be quasi-nonexpansive. We write \({{x}_{n}}\rightharpoonup x\) to indicate that the sequence \(\left\{ {{x}_{n}} \right\} \) converges weakly to x and \({{x}_{n}}\rightarrow x\) implies that \(\left\{ {{x}_{n}} \right\} \) converges strongly to x.
For solving the fixed point problem of a single-valued nonlinear mapping, the Noor iteration [see Noor (2000)] is defined by \(x_1\in H\) and
for all \(n\ge 1\), where \(\{\alpha _n\}\), \(\{\beta _n\}\), \(\{\gamma _n\}\) are sequences in [0,1]. The iterative process Eq. (1.1) is generalized form of the Mann(one-step) iterative process by Mann (1953) and the Ishikawa (two-step) iterative process by Ishikawa (1974). Phuengrattana and Suantai (2011), in 2011, introduced the new process using the concept of the Noor iteration and it is called the SP iteration. These iteration is generated by \(x_1\in H\) and
for all \(n\ge 1\), where \(\{\alpha _n\}\), \(\{\beta _n\}\), \(\{\gamma _n\}\) are sequences in [0,1]. They compared the convergence speed of Mann, Ishikawa, Noor, and SP iteration, and obtained the SP iteration converges faster than the others for the class of continuous and nondecreasing functions. However, the Noor iteration and the SP iteration have only weak convergence even in a Hilbert space.
Let \(T:H\rightarrow CB(H)\) be a multivalued mapping, \(I-T\) (I is an identity mapping) is said to be demiclosed at \(y\in H\) if \(\{x_{n}\}_{n=1}^{\infty }\subset H\), such that \(x_{n}\rightharpoonup x\) and \(\{x_n-z_n\}\rightarrow y\), where \(z_n\in Tx_n\) imply \(x-y\in Tx\).
Since 1969, fixed point theorems and the existence of fixed points of multivalued mappings have been intensively studied and considered by many authors (see, for examples, Assad and Kirk 1972; Nadler 1969; Pietramala 1991; Song and Wang 2009; Shahzad and Zegeye 2009). The study multivalued mapping is much more complicated and difficult more than single-valued mapping. Many of the results have found nontrivial applications in pure and applied science. Examples of such applications are in control theory, convex optimization, differential inclusions, game theory, and economics. For the early results involving fixed points of multivalued mappings and their applications, see Assad and Kirk (1972), Brouwer (1912), Chidume et al. (2013), Daffer and Kaneko (1995), Deimling (1992), Dominguez Benavides and Gavira (2007), Downing and Kirk (1977), Feng and Liu (2006), Geanakoplos (2003), Goebel and Reich (1984), Jung (2007), Kakutani (1941), Khan et al. (2011), Liu (2013), Reich (1978), Reich and Zaslavski (2002), Song and Cho (2011), Turkoglu and Altun (2007), and references therein.
In 2008, Kohsaka and Takahashi (2008a, b) presented a new mapping which is called a nonspreading mapping and obtained fixed point theorems for a single nonspreading mapping and also a common fixed point theorems for a commutative family of nonspreading mapping in Banach spaces. Let H be a Hilbert space. A mapping \(T : H\rightarrow H\) is said to be nonspreading if
for all \(x,y\in H\). Recently, Iemoto and Takahashi (2009) showed that \(T : H\rightarrow H\) is nonspreading if and only if
Furthermore, Takahashi (2010) defined a class of nonlinear mappings which is called hybrid as follows:
for all \(x, y\in H\). It was shown that a mapping \(T:H \rightarrow H\) is hybrid if and only if
for all \(x, y\in H\).
In addition, recently, in 2013, Liu (2013) introduced the following class of multivalued mappings: A mapping \(T:H\rightarrow CB(H)\) is said to be nonspreading if
for \(u_{x}\in Tx\) and \(u_{y}\in Ty\) for all \(x,y\in H\). In addition, he obtained a weak convergence theorem for finding a common fixed point of a finite family of nonspreading and nonexpansive multivalued mappings.
Very recently, Cholamjiak and Cholamjiak (2016) introduced a new concept of multivalued mappings in Hilbert spaces using Hausdorff metric. A multivalued mapping \(T:H \rightarrow CB(H)\) is said to be hybrid if
for all \(x, y\in H\). They showed that if T is hybrid and \(F(T)\ne \emptyset \), then T is quasi-nonexpansive. Moreover, they gave an example of a hybrid multivalued mapping which is not nonexpansive (see Cholamjiak and Cholamjiak (2016)) and proved some properties and the existence of fixed points of these mappings. Furthermore, they also proved weak and strong convergence theorems for a finite family of hybrid multivalued mappings.
Moreover, we study the following inclusion problem: find \(\hat{x}\in H\), such that
where \(A:H\rightarrow H\) is an operator and \(B:H\rightarrow 2^{H}\) is a multivalued operator. We denote the solution set of Eq. (1.3) by \((A+B)^{-1}(0)\). This problem has received much attention due to its applications in large variety of problems arising in convex programming, variational inequalities, split feasibility problem, and minimization problem. To be more precise, some concrete problems in machine learning, image processing, and linear inverse problem can be modeled mathematically as this formulation.
For solving the problem (1.3), the forward–backward splitting method (Bauschke and Combettes 2011; Cholamjiak 1994; Combettes and Wajs 2005; López et al. 2012; Lorenz and Pock 2015; Passty 1979; Tseng 2000) is usually employed and is defined by the following manner: \(x_{1}\in H\) and
where \(r>0\). In this case, each step of iterates involves only with A as the forward step and B as the backward step, but not the sum of operators. This method includes, as special cases, the proximal point algorithm (Rockafellar 1976) and the gradient method. In Lions and Mercier (1979), Lions and Mercier introduced the following splitting iterative methods in a real Hilbert space:
and
where \(J^{T}_{r}=(I+rT)^{-1}\) with \(r > 0\). The first one is often called Peaceman–Rachford algorithm (Peaceman and Rachford 1955) and the second one is called Douglas–Rachford algorithm (Douglas and Rachford 1956). We note that both algorithms are weakly convergent in general (Bauschke and Combettes 2001; Lions and Mercier 1979).
Many problems can be formulated as a problem of from Eq. (1.3). For instance, a stationary solution to the initial valued problem of the evolution equation:
can be recast as Eq. (1.3) when the governing maximal monotone F is of the form \(F=A+B\) (Lions and Mercier 1979). In optimization, it often needs (Combettes and Wajs 2005) to solve a minimization problem of the form:
where f and g are proper and lower semicontinuous convex functions from \(H_1\) to the extended real line \(\bar{\mathbb {R}}=(-\infty ,\infty ]\), such that f is differentiable with L-Lipschitz continuous gradient, and the proximal mapping of g is as follows:
In particular, if \(A:=\nabla f\) and \(B:=\partial g\), where \(\nabla f\) is the gradient of f and \(\partial g\) is the subdifferential of g which is defined by \(\partial g (x) := \big \{ s\in H : g(y) \ge g(x) + \langle s, y-x \rangle , \ \ \forall y\in H \big \}\), then problem (1.3) becomes Eqs. (1.4) and (1.8) also becomes
where \(r > 0\) is the stepsize and \(\mathrm{prox}_{rg}=(I+r\partial g)^{-1}\) is the proximity operator of g.
In 2001, Alvarez and Attouch (2001) employed the heavy ball method which was studied in Polyak (1987, 1964) for maximal monotone operators by the proximal point algorithm. This algorithm is called the inertial proximal point algorithm and it is of the following form:
It was proved that if \(\{r_{n}\}\) is nondecreasing and \(\{\theta _{n}\}\subset [0,1)\) with
then algorithm (1.11) converges weakly to a zero of B. In particular, Condition (1.12) is true for \(\theta _{n}<1/3\). Here, \(\theta _{n}\) is an extrapolation factor and the inertia is represented by the term \(\theta _n(x_{n}-x_{n-1})\). It is remarkable that the inertial terminology greatly improves the performance of the algorithm and has a nice convergence properties (Alvarez 2004; Dang et al. 2017; Dong et al. 2018; Nesterov 1983).
Recently, Moudafi and Oliny (2003) proposed the following inertial proximal point algorithm for solving the zero-finding problem of the sum of two monotone operators:
where \(A:H\rightarrow H\) and \(B:H\rightarrow 2^{H}\). They obtained the weak convergence theorem provided \(r_{n}<2/L\) with L the Lipschitz constant of A and the condition (1.12) holds. It is observed that, for \(\theta _n>0\), the algorithm (1.13) does not take the form of a forward–backward splitting algorithm, since operator A is still evaluated at the point \(x_n\).
Recently, Lorenz and Pock (2015) proposed the following inertial forward–backward algorithm for monotone operators:
where \(\{r_{n}\}\) is a positive real sequence. It is observed that algorithm (1.14) differs from that of Moudafi and Oliny insofar that they evaluated the operator B as the inertial extrapolate \(y_{n}\). The algorithms involving the inertial term mentioned above have weak convergence, and however, in some applied disciplines, the norm convergence is more desirable that the weak convergence (Bauschke and Combettes 2001).
In this work, we introduce a new algorithm combining the SP iteration with the inertial technical term for approximating common elements of the set of solutions of fixed point problems for a quasi-nonexpansive mapping and the set of solutions of inclusion problems. We prove some weak convergence theorems of the sequences generated by our iterative process under appropriate additional assumptions in Hilbert spaces. We aim to introduce an algorithm that ensures the strong convergence. To this end, using the idea of Takahashi et al. (2008), we employ the following projection method which is defined by: For \(C_{1}=C\), \(x_{1}=P_{C_{1}}x_{0}\) and
where \(0\le \alpha _{n}\le a<1\) for all \(n\in {\mathbb {N}}\). It was proved that the sequence \(\{x_n\}\) generated by (1.15) converges strongly to a fixed point of a nonexpansive mapping T. This method is usually called the shrinking projection method [see also Nakajo and Takahashi (2003)]. Furthermore, we then establish the strong convergence result under some suitable conditions. Finally, we test some numerical experiments for supporting our main results and give a comparison between our inertial projection method and the standard projection method. It is remarkable that the convergence behavior of our method has a good convergence rate.
2 Preliminaries and lemmas
Let C be a nonempty, closed, and convex subset of a Hilbert space H. The nearest point projection of H onto C is denoted by \(P_{C}\), that is, \(\Vert x-P_{C}x\Vert \le \Vert x-y\Vert \) for all \(x\in H\) and \(y\in C\). Such \(P_{C}\) is called the metric projection of H onto C. We know that the metric projection \(P_{C}\) is firmly nonexpansive, that is
for all \(x,y\in H\). Furthermore, \(\langle x-P_{C}x,y-P_{C}x\rangle \le 0\) holds for all \(x\in H\) and \(y\in C\); see (Takahashi 2000).
Lemma 2.1
(Takahashi 2000) Let H be a real Hilbert space. Then, the following equations hold:
-
(1)
\(\Vert x-y\Vert ^{2}=\Vert x\Vert ^{2}-\Vert y\Vert ^{2}-2\langle x-y,y\rangle \) for all \(x,y \in H\).
-
(2)
\(\Vert x+y\Vert ^{2}\le \Vert x\Vert ^{2}+2\langle y,x+y\rangle \) for all \(x,y \in H\).
-
(3)
\(\Vert tx+(1-t)y\Vert ^{2}=t\Vert x\Vert ^{2}+(1-t)\Vert y\Vert ^{2}-t(1-t)\Vert x-y\Vert ^{2}\) for all \(t\in [0,1]\) and \(x,y \in H\).
Lemma 2.2
(Martinez-Yanes and Xu 2006) Let C be a nonempty closed and convex subset of a real Hilbert space \(H_1\). For each x, y \(\in \) \(H_1\), and \(a \in {\mathbb {R}}\), the set
is closed and convex.
In what follows, we shall use the following notation:
Lemma 2.3
(López et al. 2012) Let X be a Banach space. Let \(A:X\rightarrow X\) be an \(\alpha \)-inverse strongly accretive of order q and \(B:X\rightarrow 2^X\) an m-accretive operator. Then, we have
-
(i)
For \(r>0\), \(F(T_r^{A,B})=(A+B)^{-1}(0)\).
-
(ii)
For \(0<s\le r\) and \(x\in X, \Vert x-T_s^{A,B}x\Vert \le 2\Vert x-T_r^{A,B}x\Vert \).
Lemma 2.4
(López et al. 2012) Let X be a uniformly convex and q-uniformly smooth Banach space for some \(q\in (0,2]\). Assume that A is a single-valued \(\alpha \)-inverse strongly accretive of order q in X. Then, given \(r>0\), there exists a continuous, strictly increasing, and convex function \(\phi _q:{\mathbb {R}}^+\rightarrow {\mathbb {R}}^+\) with \(\phi _q(0)=0\), such that, for all \(x,y\in B_r\),
where \(k_q\) is the q-uniform smoothness coefficient of X.
Lemma 2.5
(Alvarez and Attouch 2001) Let \(\{\psi _n\}\), \(\{\delta _n\}\), and \(\{\alpha _n\}\) be the sequences in \([0,+\infty )\), such that \(\psi _{n+1}\le \psi _n+\alpha _n(\psi _n-\psi _{n-1})+\delta _n\) for all \(n\ge 1\), \(\sum _{n=1}^\infty \delta _n<+\infty \) and there exists a real number \(\alpha \) with \(0\le \alpha _n\le \alpha <1\) for all \(n\ge 1\). Then, the followings hold:
-
(i)
\(\Sigma _{n\ge 1}[\psi _n-\psi _{n-1}]_+<+\infty \), where \([t]_+=\max \{t,0\}\);
-
(ii)
there exists \(\psi ^*\in [0,+\infty )\), such that \(\lim _{n\rightarrow +\infty }\psi _n=\psi ^*\).
Lemma 2.6
(Browder 1965) Let C be a nonempty closed convex subset of a uniformly convex space X and T a nonexpansive mapping with \(F(T)\ne \emptyset \). If \(\{x_n\}\) is a sequence in C, such that \(x_n\rightharpoonup x\) and \((I-T)x_n\rightarrow y\), then \((I-T)x=y\). In particular, if \(y=0\), then \(x\in F(T)\).
Lemma 2.7
(Suantai 2005) Let X be a Banach space satisfying Opial’s condition and let \(\{x_{n}\}\) be a sequence in X. Let u, v \(\in \) X be such that
\(\lim _{n \rightarrow \infty }\Vert x_{n}-u\Vert \) and \(\lim _{n \rightarrow \infty }\Vert x_{n}-v\Vert \) exist.
If \(\{x_{n_{k}}\}\) and \(\{x_{m_{k}}\}\) are subsequences of \(\{x_{n}\}\) which converge weakly to u and v, respectively, then \(u=v\).
Proposition 2.8
(Cholamjiak 1994) Let \(q>1\) and let X be a real smooth Banach space with the generalized duality mapping \(j_q\). Let \(m\in {\mathbb {N}}\) be fixed. Let \(\{x_i\}_{i=1}^m\subset X\) and \(t_i\ge 0\) for all \(i=1,2,\ldots ,m\) with \(\sum _{i=1}^mt_i\le 1\). Then, we have
Condition (A) Let H be a Hilbert space. A multivalued mapping \(T:H\rightarrow CB(H)\) is said to satisfy Condition (A) if \(\Vert x-p\Vert =d(x,Tp)\) for all \(x\in H\) and \(p\in F(T)\).
Lemma 2.9
(Cholamjiak and Cholamjiak 2016) Let H be a real Hilbert space. Let \(T:H\rightarrow K(H)\) be a hybrid multivalued mapping. If \(F(T)\ne \emptyset \), then T is quasi-nonexpansive multivalued mapping.
Lemma 2.10
(Cholamjiak and Cholamjiak 2016) Let H be a real Hilbert space. Let \(T:H\rightarrow K(H)\) be a hybrid multivalued mapping with \(F(T)\ne \emptyset \). Then, F(T) is closed.
Lemma 2.11
Cholamjiak and Cholamjiak (2016) Let H be a real Hilbert space. Let \(T:H\rightarrow K(H)\) be a hybrid multivalued mapping with \(F(T)\ne \emptyset \). If T satisfies Condition (A), then F(T) is convex.
Lemma 2.12
Cholamjiak and Cholamjiak (2016) Let H be a real Hilbert space. Let \(T:H\rightarrow K(H)\) be a hybrid multivalued mapping. Let \(\{x_{n}\}\) be a sequence in H, such that \(x_{n}\rightharpoonup p\) and \(\lim _{n\rightarrow \infty }\Vert x_{n}-y_{n}\Vert =0\) for some \(y_{n}\in Tx_{n}\). Then, \(p\in Tp\).
3 Main results
In this section, we aim to introduce and prove the strong convergence of an inertial method with a forward–backward method for solving inclusion problems and fixed point problems of quasi-nonexpansive mapping in Hilbert spaces. To this end, we need the following crucial results.
Lemma 3.1
Let H be a real Hilbert space. Let \(T:H\rightarrow CB(H)\) be a quasi-nonexpansive mapping with \(F(T)\ne \emptyset \). Then, F(T) is closed.
Proof
If \(F(T)=\emptyset \), then it is closed. Assume that \(F(T)\ne \emptyset \). Let \(\{x_{n}\}\) be a sequence in F(T), such that \(x_{n}\rightarrow x\) as \(n\rightarrow \infty \). We have
It follows that \(d(x,Tx)=0\). Hence, \(x\in F(T)\). We conclude that F(T) is closed. \(\square \)
Lemma 3.2
Let C be a closed convex subset of a real Hilbert space H. Let \(T:H\rightarrow CB(H)\) be a quasi-nonexpansive mapping with \(F(T)\ne \emptyset \). If T satisfies Condition (A), then F(T) is convex.
Proof
Let \(p=tp_{1}+(1-t)p_{2}\), where \(p_{1},p_{2}\in F(T)\) and \(t\in (0,1)\). Let \(z\in Tp\). It follows from Lemma 2.1 that
and hence, \(p=z\). Therefore, \(p\in F(T)\). This completes the proof.
Theorem 3.3
Let H be a real Hilbert space and \(T:H\rightarrow CB(H)\) be a quasi-nonexpansive mapping satisfying Condition (A). Let \(A:H\rightarrow H\) be an \(\alpha \)-inverse strongly monotone operator and \(B:H\rightarrow 2^{H}\) a maximal monotone operator. Assume that \(S=(A+B)^{-1}(0)\cap F(T)\ne \emptyset \) and \(I-T\) is demiclosed at 0 . Let \(\{x_{n}\}, \{y_{n}\}\) and \(\{z_n\}\) be sequences generated by \(x_{0},x_{1}\in H\) and
where \(J^{B}_{r_{n}}=(I+r_{n}B)^{-1}\), \(\{r_{n}\}\subset (0, 2\alpha )\), \(\{\theta _{n}\}\subset [0,\theta ]\) for some \(\theta \in [0,1)\) and \(\{\alpha _{n}\}\) and \(\{\beta _{n}\}\) are sequences in [0, 1]. Assume that the following conditions hold:
-
(i)
\(\sum _{n=1}^{\infty }\theta _{n}\Vert x_{n}-x_{n-1}\Vert <\infty \).
-
(ii)
\(0<\liminf _{n\rightarrow \infty }\alpha _n\le \limsup _ {n\rightarrow \infty }\alpha _n<1\).
-
(iii)
\(\limsup _{n\rightarrow \infty }\beta _{n}<1\);
-
(iv)
\(0<\liminf _{n\rightarrow \infty }r_{n}\le \limsup _{n\rightarrow \infty }r_{n}<2\alpha \).
Then, the sequence \(\{x_{n}\}\) converges weakly to \(q\in S\).
Proof
Write \(J_n=(I+r_nB)^{-1}(I-r_nA)\). Notice that we can write
Let \(p\in S\) and T satisfies Condition (A). For \(w_n\in Ty_n\), such that
we have
By Lemma 2.4 and Eq. (3.4), we have
From Lemma 2.5 and the assumption (i), we obtain \(\lim _{n\rightarrow \infty }\Vert x_n-p\Vert \) exists, in particular, \(\{x_n\}\) is bounded and also are \(\{y_n\}\) and \(\{z_n\}\). We next show that \(x_n\rightharpoonup q\in (A+B)^{-1}(0)\). By Lemmas 2.1, 2.4, and T which satisfies Condition (A), we have
Since \(\lim _{n\rightarrow \infty }\Vert x_n-p\Vert \) exists, it follows, from Eq. (3.6), the assumptions (i), (iii), and (iv) that:
This give, by the triangle inequality, that
Since \(\liminf _{n\rightarrow \infty }r_n>0\), there is \(r>0\), such that \(r_n\ge r\) for all \(n\ge 1\). Lemma 2.3 (ii) yields that
Then, by Eqs. (3.8) and (3.9), we obtain
From Eq. (3.8), we have
Again by Lemmas 2.1, 2.4, and T satisfies Condition (A), we have
Since \(\lim _{n\rightarrow \infty }\Vert x_n-p\Vert \) exists and the Assumption (i) and (ii), it follows from Eq. (3.12) that
This implies that
From the definition of \(\{y_n\}\) and the Assumption (i), we have
It follows from Eqs. (3.11), (3.14), and (3.15) that
as \(n\rightarrow \infty \). From Eqs. (3.11) and (3.16), we obtain
as \(n\rightarrow \infty \). Since \(\{x_n\}\) is bounded and H is reflexive, \(\omega _w(x_n)=\{x\in H:x_{n_i}\rightharpoonup x, \{x_{n_i}\}\subset \{x_n\}\}\) is nonempty. Let \(q\in \omega _w(x_n)\) be an arbitrary element. Then, there exists a subsequence \(\{x_{n_i}\}\subset \{x_n\}\) converging weakly to q. Let \(p\in \omega _w(x_n)\) and \(\{x_{n_m}\}\subset \{x_n\}\) be such that \(x_{n_m}\rightharpoonup p\). From Eq. (3.17), we also have \(z_{n_i}\rightharpoonup q\) and \(z_{n_m}\rightharpoonup p\). Since \(T_r^{A,B}\) is nonexpansive, by Lemma 2.6 and Eq. (3.9), we have \(p,q\in (A+B)^{-1}(0)\). From Eq. (3.15), we obtain \(y_{n_i}\rightharpoonup q\) and \(y_{n_m}\rightharpoonup p\). Since \(I-T\) is demiclosed at 0 and Eq. (3.13), we have \(p,q\in F(T)\). Applying Lemma 2.7, we obtain \(p=q\). \(\square \)
Theorem 3.4
Let H be a real Hilbert space and \(T:H\rightarrow CB(H)\) be a quasi-nonexpansive mapping satisfying Condition (A). Let \(A:H\rightarrow H\) be an \(\alpha \)-inverse strongly monotone operator and \(B:H\rightarrow 2^{H}\) a maximal monotone operator. Assume that \(S=(A+B)^{-1}(0)\cap F(T)\ne \emptyset \) and \(I-T\) is demiclosed at 0 . Let \(\{x_{n}\}, \{y_{n}\}\), \(\{z_n\}\) and \(\{v_n\}\) be sequences generated by \(x_{0},x_{1}\in H\) and
where \(J^{B}_{r_{n}}=(I+r_{n}B)^{-1}\), \(\{r_{n}\}\subset (0, 2\alpha )\), \(\{\theta _{n}\}\subset [0,\theta ]\) for some \(\theta \in [0,1)\), and \(\{\alpha _{n}\}\) and \(\{\beta _{n}\}\) are sequences in [0, 1]. Assume that the following conditions hold:
-
(i)
\(\sum _{n=1}^{\infty }\theta _{n}\Vert x_{n}-x_{n-1}\Vert <\infty \).
-
(ii)
\(0<\liminf _{n\rightarrow \infty }\alpha _n\le \limsup _ {n\rightarrow \infty }\alpha _n<1\).
-
(iii)
\(\limsup _{n\rightarrow \infty }\beta _{n}<1\).
-
(iv)
\(0<\liminf _{n\rightarrow \infty }r_{n}\le \limsup _ {n\rightarrow \infty }r_{n}<2\alpha \).
Then, the sequence \(\{x_{n}\}\) converges strongly to \(q=P_{S}x_1\).
Proof
We split the proof into five steps.
Step 1 Show that \(P_{C_{n+1}}x_1\) is well defined for every \(x\in H\). We know that \((A+B)^{-1}(0)\) is closed and convex by Lemma 2.3. Since T satisfies Condition (A), F(T) is closed and convex by Lemmas 3.1 and 3.2. From the definition of \(C_{n+1}\) and Lemma 2.9, \(C_{n+1}\) is closed and convex for each \(n\ge 1\). For each \(n\in {\mathbb {N}}\), we put \(J_n=(I+r_nB)^{-1}(I-r_nA)\) and let \(p\in S\). Since \(J_n\) is nonexpansive, we have
Therefore, we have \(p\in C_{n+1}\), and thus, \(S\subset C_{n+1}\). Therefore, \(P_{C_{n+1}}x_1\) is well defined.
Step 2 Show that \(\lim _{n\rightarrow \infty }\Vert x_n-x_1\Vert \) exists. Since S is nonempty, closed, and convex subset of H, there exists a unique \(v\in S\), such that
From \(x_n=P_{C_n}x_1\), \(C_{n+1}\subset C_n\), and \(x_{n+1}\in C_{n+1}\), \(\forall n\ge 1\), we get
On the other hand, as \(S\subset C_n\), we obtain
It follows that the sequence \(\{x_n\}\) is bounded and nondecreasing. Therefore, \(\lim _{n\rightarrow \infty }\Vert x_n-x_1\Vert \) exists.
Step 3 Show that \(x_{n}\rightarrow q\in C\) as \(n\rightarrow \infty \). For \(m>n\), by the definition of \(C_{n}\), we have \(x_{m}=P_{{C}_{m}}x_{1}\in C_{m}\subseteq C_{n}\). By Lemma 2.9, we obtain that
Since \(\lim _{n\rightarrow \infty }\Vert x_{n}-x_{1}\Vert \) exists, it follows from Eq. (3.23) that \(\lim _{n\rightarrow \infty }\Vert x_{m}-x_{n}\Vert =0\). Hence, \(\{x_{n}\}\) is Cauchy sequence in C and so \(x_{n}\rightarrow q\in C\) as \(n\rightarrow \infty \).
Step 4 Show that \(q\in S\). From Step 3, we have that \(\lim _{n\rightarrow \infty }\Vert x_{n+1}-x_n\Vert =0\). Since \(x_{n+1}\in C_n\), we have
By the Assumption (i) and Eq. (3.24), we obtain
Since \(J_n\) is nonexpansive and T satisfies Condition (A), by Lemma 2.1, we have
It follows from Eq. (3.26), the Assumptions (i), (iii), and (iv) that
This give, by the triangle inequality, that
Since \(\liminf _{n\rightarrow \infty }r_n>0\), there is \(r>0\), such that \(r_n\ge r\) for all \(n\ge 1\). Lemma 2.3 (ii) yields that
Then, by Eqs. (3.28) and (3.29), we obtain
From Eq. (3.29), we have
It follows from Eqs. (3.25) and (3.31) that
By the definition of \(\{y_n\}\) and the Assumption (i), we obtain
It follows from Eqs. (3.25) and (3.33) that
as \(n\rightarrow \infty \). Since \(\{x_n\}\) is bounded and H is reflexive, \(\omega _w(x_n)=\{x\in H:x_{n_i}\rightharpoonup x, \{x_{n_i}\}\subset \{x_n\}\}\) is nonempty. Let \(q\in \omega _w(x_n)\) be an arbitrary element. Then, there exists a subsequence \(\{x_{n_i}\}\subset \{x_n\}\) converging weakly to q. Let \(p\in \omega _w(x_n)\) and \(\{x_{n_m}\}\subset \{x_n\}\) be such that \(x_{n_m}\rightharpoonup p\). From Eq. (3.32), we also have \(z_{n_i}\rightharpoonup q\) and \(z_{n_m}\rightharpoonup p\). Since \(T_r^{A,B}\) is nonexpansive, by Lemma 2.6 and Eq. (3.30), we have \(p,q\in (A+B)^{-1}(0)\). From Eq. (3.33), we obtain \(y_{n_i}\rightharpoonup q\) and \(y_{n_m}\rightharpoonup p\). Since \(I-T\) is demiclosed at 0 and Eq. (3.34), we have \(p,q\in F(T)\). Applying Lemma 2.7, we obtain \(p=q\).
Step 5 Show that \(q=P_{S}x_1\). Since \(x_n=P_{C_n}x_1\) and \(S\subset C_n\), we obtain
By taking the limit in Eq. (3.35), we obtain
This shows that \(q=P_{S}x_1\).
By Lemmas 2.9–2.11, we know that if \(F(T)\ne \emptyset \), then a hybrid multivalued mapping \(T:H\rightarrow K(H)\) is quasi-nonexpansive and F(T) is closed and convex. We also know that \(I-T\) is demiclosed at 0 by Lemma 2.12. We then obtain the following results.
Theorem 3.5
Let H be a real Hilbert space and \(T:H\rightarrow K(H)\) be a hybrid multivalued mapping satisfying Condition (A). Let \(A:H\rightarrow H\) be an \(\alpha \)-inverse strongly monotone operator and \(B:H\rightarrow 2^{H}\) a maximal monotone operator. Assume that \(S=(A+B)^{-1}(0)\cap F(T)\ne \emptyset \). Let \(\{x_{n}\}, \{y_{n}\}\) and \(\{z_n\}\) be sequences generated by \(x_{0},x_{1}\in H\) and
where \(J^{B}_{r_{n}}=(I+r_{n}B)^{-1}\), \(\{r_{n}\}\subset (0, 2\alpha )\), \(\{\theta _{n}\}\subset [0,\theta ]\) for some \(\theta \in [0,1)\) and \(\{\alpha _{n}\}\) and \(\{\beta _{n}\}\) are sequences in [0, 1]. Assume that the following conditions hold:
-
(i)
\(\sum _{n=1}^{\infty }\theta _{n}\Vert x_{n}-x_{n-1}\Vert <\infty \).
-
(ii)
\(0<\liminf _{n\rightarrow \infty }\alpha _n\le \limsup _ {n\rightarrow \infty }\alpha _n<1\).
-
(iii)
\(\limsup _{n\rightarrow \infty }\beta _{n}<1\).
-
(iv)
\(0<\liminf _{n\rightarrow \infty }r_{n}\le \limsup _ {n\rightarrow \infty }r_{n}<2\alpha \).
Then, the sequence \(\{x_{n}\}\) converges weakly to \(q\in S\).
Theorem 3.6
Let H be a real Hilbert space and \(T:H\rightarrow CB(H)\) be a hybrid multivalued mapping satisfying Condition (A). Let \(A:H\rightarrow H\) be an \(\alpha \)-inverse strongly monotone operator and \(B:H\rightarrow 2^{H}\) a maximal monotone operator. Assume that \(S=(A+B)^{-1}(0)\cap F(T)\ne \emptyset \). Let \(\{x_{n}\}, \{y_{n}\}\), \(\{z_n\}\), and \(\{v_n\}\) be sequences generated by \(x_{0},x_{1}\in H\) and
where \(J^{B}_{r_{n}}=(I+r_{n}B)^{-1}\), \(\{r_{n}\}\subset (0, 2\alpha )\), and \(\{\theta _{n}\}\subset [0,\theta ]\) for some \(\theta \in [0,1)\), and \(\{\alpha _{n}\}\) and \(\{\beta _{n}\}\) are sequences in [0, 1]. Assume that the following conditions hold:
-
(i)
\(\sum _{n=1}^{\infty }\theta _{n}\Vert x_{n}-x_{n-1}\Vert <\infty \).
-
(ii)
\(0<\liminf _{n\rightarrow \infty }\alpha _n\le \limsup _{n\rightarrow \infty }\alpha _n<1\).
-
(iii)
\(\limsup _{n\rightarrow \infty }\beta _{n}<1\).
-
(iv)
\(0<\liminf _{n\rightarrow \infty }r_{n} \le \limsup _{n\rightarrow \infty }r_{n}<2\alpha \).
Then, the sequence \(\{x_{n}\}\) converges strongly to \(q=P_{S}x_1\).
Remark 3.7
We remark here that the condition (i) is easily implemented in numerical computation, since the value of \(\Vert x_n-x_{n-1}\Vert \) is known before choosing \(\theta _{n}\). Indeed, the parameter \(\theta _{n}\) can be chosen, such that \(0\le \theta _n\le \bar{\theta }_{n}\), where
where \(\{\omega _n\}\) is a positive sequence, such that \(\sum _{n=1}^{\infty } \omega _n<\infty \).
We now give an example in Euclidean space \({\mathbb {R}}^3\) to support the main theorem.
Example 3.8
Let \(H={\mathbb {R}}^3\) and \(C=\{x\in {\mathbb {R}}^3:\Vert x\Vert \le 2\}\), and let \(T:{\mathbb {R}}^3\rightarrow CB({\mathbb {R}}^3)\) be defined by
where \(x=(x_1,x_2,x_3)\in {\mathbb {R}}^3\). We see that T is a quasi-nonexpansive multivalued mapping. Let \(A:{\mathbb {R}}^3\rightarrow {\mathbb {R}}^3\) be defined by \(Ax=3x+(1,2,1)\) and let \(B:{\mathbb {R}}^3\rightarrow {\mathbb {R}}^3\) be defined by \(Bx=4x\), where \(x=(x_1,x_2,x_3)\in {\mathbb {R}}^3\). We see that A is 1/3-inverse strongly monotone and B is maximal monotone. Moreover, by a direct calculation, we have for \(r_n>0\)
where \(x=(x_1,x_2,x_3)\in {\mathbb {R}}^3\). Since \(\alpha =1/3\), we can choose \(r_n=0.1\) for all \(n\in {\mathbb {N}}\). Let \(\alpha _n=\beta _n=\frac{n}{100n+1}\) and
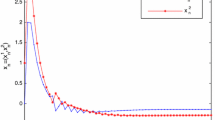
We provide a numerical test of a comparison between our inertial forward–backward method defined in Theorem 3.4 and a standard forward–backward method (i.e., \(\theta _n=0\)). The stoping criterion is defined by \(E_n=\Vert x_{n+1}-x_n\Vert <10^{-9}\).
The different choices of \(x_0\) and \(x_1\) are given as follows:
-
Choice 1: \(x_0=(-2,8,-5) \) and \(x_{1}=(-3,-5,8) \).
-
Choice 2: \(x_0=(-1,7,6)\) and \(x_{1}=(-3,1,-1) \).
-
Choice 3: \(x_0=(-2.34,3.29,-4.56)\) and \(x_{1}=(6.13,-5.24,-1.19)\).

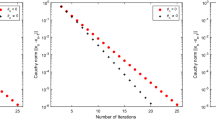
Error plotting \(E_n\) of \(\theta _{n}\ne 0\) and \(\theta _{n}=0\) for each of the randoms of choice 1 in Table 1 is shown in the following figures, respectively

Error plotting of \(E_n\) of \(\theta _{n}\ne 0\) and \(\theta _{n}=0\) for each of the randoms of choice 2 in Table 1 is shown in the following figures, respectively

Error plotting of \(E_n\) of \(\theta _{n}\ne 0\) and \(\theta _{n}=0\) for each of the randoms of choice 3 in Table 1 is shown in the following figures, respectively
Remark 3.9
From Figs. 1, 2, and 3, it is shown that our forward–backward method with the inertial technical term has a good convergence speed and requires small number of iterations than the standard forward–backward method for each of the randoms.
4 Applications and numerical experiments
In this section, we discuss various applications in the variational inequality problem and the convex minimization problem.
4.1 Variational inequality problem
The variational inequality problem (VIP) is to find a point \(\hat{x}\in C\), such that
where \(A:C\rightarrow H\) is a nonlinear monotone operator. The solution set of Eq. (4.1) will be denoted by S. The extragradient method is used to solve the VIP (4.1). It is also known that the VIP is a special case of the problem of finding zeros of the sum of two monotone operators. Indeed, the resolvent of the normal cone is nothing but the projection operator. Therefore, we obtain immediately the following results.
Theorem 4.1
Let H be a real Hilbert space and \(T:H\rightarrow CB(H)\) be a quasi-nonexpansive mapping satisfying Condition (A). Let \(A:H\rightarrow H\) be an \(\alpha \)-inverse strongly monotone operator and C be a nonempty closed convex subset of H. Assume that \(S\cap F(T)\ne \emptyset \) and \(I-T\) is demiclosed at 0. Let \(\{x_{n}\}, \{y_{n}\}\), \(\{z_n\}\), and \(\{v_n\}\) be sequences generated by \(x_{0},x_{1}\in H\) and
where \(\{r_{n}\}\subset (0, 2\alpha )\), \(\{\theta _{n}\}\subset [0,\theta ]\) for some \(\theta \in [0,1)\), and \(\{\alpha _{n}\}\) and \(\{\beta _{n}\}\) are sequences in [0, 1]. Assume that the following conditions hold:
-
(i)
\(\sum _{n=1}^{\infty }\theta _{n}\Vert x_{n}-x_{n-1}\Vert <\infty \).
-
(ii)
\(0<\liminf _{n\rightarrow \infty }\alpha _n\le \limsup _ {n\rightarrow \infty }\alpha _n<1\).
-
(iii)
\(\limsup _{n\rightarrow \infty }\beta _{n}<1\).
-
(iv)
\(0<\liminf _{n\rightarrow \infty }r_{n}\le \limsup _{n\rightarrow \infty } r_{n}<2\alpha \).
Then, the sequence \(\{x_{n}\}\) converges strongly to \(q=P_{S\cap F(T)}x_1\).
Example 4.2
Let \(H={\mathbb {R}}^3\) and \(C=\{(x_1,x_2,x_3)\in {\mathbb {R}}^3| \langle a,x\rangle \ge b\}\), where \(a=(2,1,-3)\) and \(b=2\), and let \(A={{\left( \begin{array}{ccc} 1 &{} -1 &{} 5 \\ 0 &{} 1 &{} 3 \\ 0 &{} 0 &{} 2 \\ \end{array} \right) }}\).
We see that A is 1 / 2-inverse strongly monotone. Therefore, we can choose \(r_n=0.1\) for all \(n\in {\mathbb {N}}\). Let \(\alpha _n\), \(\beta _n\), and \(\theta _n\) be as in Example 3.8. The stoping criterion is defined by \(E_n=\Vert x_{n+1}-x_n\Vert <10^{-9}\). Starting \(x_0=(0,2,1)\), \(x_1=(1,-2,1)\) and computing iteratively algorithm in Theorem 3.4. The different choices of \(x_0\) and \(x_1\) are given as follows:
-
Choice 1: \(x_0=(1,-3,7)^T \) and \(x_{1}=(9,2,-1)^T\).
-
Choice 2: \(x_0=(-3,1,4)^T\) and \(x_{1}=(2,-8,1)^T \).

Error plotting \(E_n\) of \(\theta _{n}\ne 0\) and \(\theta _{n}=0\) for each of the randoms of choice 1 in Table 2 is shown in the following figures, respectively

Error plotting \(E_n\) of \(\theta _{n}\ne 0\) and \(\theta _{n}=0\) for each of the randoms of choice 2 in Table 2 is shown in the following figures, respectively

Error plotting \(E_n\) of \(\theta _{n}\ne 0\) and \(\theta _{n}=0\) for each of the randoms of choice 1 in Table 3 is shown in the following figures, respectively

Error plotting \(E_n\) of \(\theta _{n}\ne 0\) and \(\theta _{n}=0\) for each of the randoms of choice 2 in Table 3 is shown in the following figures, respectively
4.2 Convex minimization problem
Let \(F:H\rightarrow {\mathbb {R}}\) be a convex smooth function and \(G:H\rightarrow {\mathbb {R}}\) be a convex, lower semicontinuous, and nonsmooth function. We consider the problem of finding \(\hat{x}\in H\), such that
for all \(x\in H\). This problem (4.3) is equivalent, by Fermat’s rule, to the problem of finding \(\hat{x}\in H\), such that
where \(\nabla F\) is a gradient of F and \(\partial G\) is a subdifferential of G. The minimizer of \(F+G\) will be denoted by S. We know that if \(\nabla F\) is \(\frac{1}{L}\)-Lipschitz continuous, then it is L-inverse strongly monotone (Baillon and Haddad 1977, Corollary 10). Moreover, \(\partial G\) is maximal monotone (Rockafellar 1970, Theorem A). If we set \(A=\nabla F\) and \(B=\partial G\) in Theorem 3.3, then we obtain the following result.
Theorem 4.3
Let H be a real Hilbert space and \(T:H\rightarrow CB(H)\) be a quasi-nonexpansive mapping satisfying Condition (A). Let \(F:H\rightarrow {\mathbb {R}}\) be a convex and differentiable function with \(\frac{1}{L}\)-Lipschitz continuous gradient \(\nabla F\) and \(G:H\rightarrow {\mathbb {R}}\) be a convex and lower semicontinuous function which \(F+G\) attains a minimizer. Assume that \(S\cap F(T)\ne \emptyset \) and \(I-T\) is demiclosed at 0 . Let \(\{x_{n}\}, \{y_{n}\}\), \(\{z_n\}\), and \(\{v_n\}\) be sequences generated by \(x_{0},x_{1}\in H\) and
where \(J_{r_n}^{\partial G}=(I+r_n\partial G)^{-1}\), \(\{r_{n}\}\subset (0, 2/L)\), and \(\{\theta _{n}\}\subset [0,\theta ]\) for some \(\theta \in [0,1)\), and \(\{\alpha _{n}\}\) and \(\{\beta _{n}\}\) are sequences in [0, 1]. Assume that the following conditions hold:
-
(i)
\(\sum _{n=1}^{\infty }\theta _{n}\Vert x_{n}-x_{n-1}\Vert <\infty \).
-
(ii)
\(0<\liminf _{n\rightarrow \infty }\alpha _n\le \limsup _ {n\rightarrow \infty }\alpha _n<1\).
-
(iii)
\(\limsup _{n\rightarrow \infty }\beta _{n}<1\).
-
(iv)
\(0<\liminf _{n\rightarrow \infty }r_{n}\le \limsup _ {n\rightarrow \infty }r_{n}<2/L\).
Then, the sequence \(\{x_{n}\}\) converges strongly to \(q=P_{S\cap F(T)}x_1\).
Example 4.4
Solve the following minimization problem:
where \(x=(x_1,x_2,x_3)\in {\mathbb {R}}^3\).
Set \(F(x)=\Vert x\Vert ^2_2+(3,5,-1)x\) and \(G(x)=\Vert x\Vert _1\) for all \(x\in {\mathbb {R}}^3\). We have for \(x\in {\mathbb {R}}^3\) and \(r>0\), \(\nabla F=2x+(3,5,-1)\) and
We see that \(\nabla F\) is 2-Lipschitz continuous; consequently, it is 1 / 2-inverse strongly monotone. Choose \(r_n=0.1\) for all \(n\in {\mathbb {N}}\). Let \(\alpha _n\), \(\beta _n\), \(\gamma _n\), and \(\theta _n\) be as in Example 3.8. The stoping criterion is defined by \(\Vert x_{n+1}-x_n\Vert <10^{-9}\). The different choices of \(x_0\) and \(x_1\) are given as follows:
-
Choice 1: \(x_0=(-2,-1,-1)^T \) and \(x_{1}=(3,6,7)^T \).
-
Choice 2: \(x_0=(-5,-6,-3)^T\) and \(x_{1}=(-3,4,-5)^T \).
From above preliminary numerical results, we see that the inertial forward–backward method with the inertial technical term has a good convergence speed than the standard forward–backward method for each of the randoms.
5 Conclusion
In this paper, we present a new modified inertial forward–backward splitting method combining the SP iteration for solving the fixed point problem of a quasi-nonexpansive multivalued mapping and the inclusion problem. The weak convergence theorem is established under some suitable conditions in Hilbert space. we then use the shrinking projection method for obtaining the strong convergence theorem and apply our result to solve the variational inequality problem and the convex minimization problem. Some numerical experiments show that our inertial forward–backward method have a competitive advantage over the standard forward–backward method (see in Tables 1, 2, 3, and Figs. 1, 2, 3, 4, 5, 6, and 7).
References
Alvarez F (2004) Weak convergence of a relaxed and inertial hybrid projection-proximal point algorithm for maximal monotone operators in Hilbert spaces. SIAM J Optim 14(3):773–782
Alvarez F, Attouch H (2001) An inertial proximal method for monotone operators via discretization of a nonlinear oscillator with damping. Set-Valued Anal 9:3–11
Assad NA, Kirk WA (1972) Fixed point theorems for set-valued mappings of contractive type. Pac J Math 43:553–562
Baillon JB, Haddad G (1977) Quelques proprietes des operateurs angle-bornes et cycliquement monotones. Isr J Math 26:137–150
Bauschke HH, Combettes PL (2011) Convex analysis and monotone operator theory in hilbert spaces. CMS books in mathematics. Springer, New York
Bauschke HH, Combettes PL (2001) A weak-to-strong convergence principle for Fejér-monotone methods in Hilbert spaces. Math Oper Res 26:248–264
Brouwer LEJ (1912) Uber Abbildung von Mannigfaltigkeiten. Math Ann 71:598
Browder FE (1965) Nonexpansive nonlinear operators in a Banach space. Proc Natl Acad Sci USA 54:1041–1044
Chidume CE, Chidume CO, Djitte N, Minjibir MS (2013) Convergence theorems for fixed points of multi-valued strictly pseudocontractive mappings in Hilbert spaces. Abstr Appl Anal 2013. https://doi.org/10.1155/2013/629468
Cholamjiak P (1994) A generalized forward–backward splitting method for solving quasi inclusion problems in Banach spaces. Numer Algor 8:221–239
Cholamjiak P, Cholamjiak W (2016) Fixed point theorems for hybrid multivalued mappings in Hilbert spaces. J Fixed Point Theory Appl 18:673–688
Combettes PL, Wajs VR (2005) Signal recovery by proximal forward–backward splitting. Multiscale Model Simul 4:1168–1200
Dang Y, Sun J, Xu H (2017) Inertial accelerated algorithms for solving a split feasibility problem. J Ind Manag Optim 13:1383–1394. https://doi.org/10.3934/jimo.2016078
Daffer PZ, Kaneko H (1995) Fixed points of generalized contractive multi-valued mappings. J Math Anal Appl 192:655–666
Deimling K (1992) Multivalued differential equations. Walter de Gruyter, Berlin
Dominguez Benavides T, Gavira B (2007) A fixed point property for multivalued nonexpansive mappings. J Math Anal Appl 328:1471–1483
Downing D, Kirk WA (1977) Fixed point theorems for set-valued mappings in metric and Banach spaces. Math Jpn 22:99–112
Douglas J, Rachford HH (1956) On the numerical solution of the heat conduction problem in 2 and 3 space variables. Trans Am Math Soc 82:421–439
Dong QL, Yuan HB, Cho YJ, Rassias TM (2018) Modified inertial Mann algorithm and inertial CQ-algorithm for nonexpansive mappings. Optim Lett. https://doi.org/10.1007/s11590-016-1102-9
Feng Y, Liu S (2006) Fixed point theorems for multi-valued contractive mapping and multi-valued Caristi type mappings. J Math Anal Appl 317:103–112
Geanakoplos J (2003) Nash and Walras equilibrium via Brouwer. Econ Theory 21:585–603
Goebel K, Reich S (1984) Uniform convexity, hyperbolic geometry, and nonexpansive mappings, vol 83. Marcel Dekker, New York
Iemoto S, Takahashi W (2009) Approximating common fixed points of nonexpansive mappings and nonspreading mappings in a Hilbert space. Nonlinear Anal 71:e2080–e2089
Ishikawa S (1974) Fixed points by a new iteration method. Proc Am Math Soc 44:147–150
Jung JS (2007) Strong convergence theorems for multivalued nonexpansive nonself-mappings in Banach spaces. Nonlinear Anal 66:2345–2354
Kakutani S (1941) A generalization of Brouwer’s fixed point theorem. Duke Math J 8:457–459
Khan SH, Yildirim I, Rhoades BE (2011) A one-step iterative process for two multi-valued nonexpansive mappings in Banach spaces. Comput Math Appl 61:3172–3178
Kohsaka F, Takahashi W (2008) Existence and approximation of fixed points of firmly nonexpansive-type mappings in Banach spaces. SIAM J Optim 19:824–835
Kohsaka F, Takahashi W (2008) Fixed point theorems for a class of nonlinear mappings related to maximal monotone operators in Banach spaces. Arch Math (Basel) 91:166–177
Lions PL, Mercier B (1979) Splitting algorithms for the sum of two nonlinear operators. SIAM J Numer Anal 16:964–979
Liu HB (2013) Convergence theorems for a finite family of nonspreading and nonexpansive multivalued mappings and nonexpansive multivalued mappings and equilibrium problems with application. Theor. Math. Appl. 3:49–61
López, G, Martín-Márquez V, Wang F, Xu HK (2012) Forward–backward splitting methods for accretive operators in Banach spaces. Abstr Appl Anal. https://doi.org/10.1155/2012/109236
Lorenz D, Pock T (2015) An inertial forward–backward algorithm for monotone inclusions. J Math Imaging Vis 51:311–325
Mann WR (1953) Mean value methods in iteration. Proc Am Math Soc 4:506–510
Martinez-Yanes C, Xu H-K (2006) Strong convergence of CQ method for fixed point iteration processes. Nonlinear Anal 64:2400–2411
Moudafi A, Oliny M (2003) Convergence of a splitting inertial proximal method for monotone operators. J Comput Appl Math 155:447–454
Nadler SB (1969) Multi-valued contraction mappings. Pac J Math 30:475–488
Nakajo K, Takahashi W (2003) Strongly convergence theorems for nonexpansive mappings and nonexpansive semigroups. J Math Anal Appl 279:372–379
Nesterov Y (1983) A method for solving the convex programming problem with convergence rate \(O(1/k^2)\). Dokl Akad Nauk SSSR 269:543–547
Noor MA (2000) New approximation schemes for general variational inequalities. J Math Anal Appl 251:217–229
Passty GB (1979) Ergodic convergence to a zero of the sum of monotone operators in Hilbert space. J Math Anal Appl 72:383–390
Peaceman DH, Rachford HH (1955) The numerical solution of parabolic and elliptic differentials. J Soc Ind Appl Math 3:28–41
Phuengrattana W, Suantai S (2011) On the rate of convergence of Mann, Ishikawa, Noor and SP-iterations for continuous functions on an arbitrary interval. J Comput Appl Math 235:3006–3014
Pietramala P (1991) Convergence of approximating fixed points sets for multivalued nonexpansive mappings. Comment Math Univ Carolin 32:697–701
Polyak BT (1987) Introduction to optimization. Optimization Software, New York
Polyak BT (1964) Some methods of speeding up the convergence of iterative methods. Zh Vychisl Mat Mat Fiz 4:1–17
Reich S (1978) Approximate selections, best approximations, fixed points, and invariant sets. J Math Anal Appl 62:104–113
Reich S, Zaslavski AJ (2002) Convergence of iterates of nonexpansive set-valued mappings. Set Valued Mapp Appl Nonlinear Anal 4:411–420
Rockafellar RT (1970) On the maximality of subdifferential mappings. Pac J Math 33:209–216
Rockafellar RT (1976) Monotone operators and the proximal point algorithm. SIAM J Control Optim 14:877–898
Shahzad N, Zegeye H (2009) On Mann and Ishikawa iteration schemes for multi-valued maps in Banach spaces. Nonlinear Anal TMA 7:838–844
Song Y, Cho YJ (2011) Some notes on Ishikawa iteration for multi-valued mappings. Bull. Korean Math Soc 48:575–584
Song Y, Wang H (2009) Convergence of iterative algorithms for multivalued mappings in Banach spaces. Nonlinear Anal 70:1547–1556
Suantai S (2005) Weak and strong convergence criteria of Noor iterations for asymptotically nonexpansive mappings. J Math Anal Appl 311:506–517
Takahashi W (2000) Nonlinear functional analysis. Yokohama Publishers, Yokohama
Takahashi W (2010) Fixed point theorems for new nonlinear mappings in a Hilbert space. J Nonlinear Convex Anal 11:79–88
Takahashi W, Takeuchi Y, Kubota R (2008) Strong convergence theorems by hybrid methods for families of nonexpansive mappings in Hilbert spaces. J Math Anal Appl 341:276–286
Tseng P (2000) A modified forward–backward splitting method for maximal monotone mappings. SIAM J Control Optim 38:431–446
Turkoglu D, Altun I (2007) A fixed point theorem for multi-valued mappings and its applications to integral inclusions. Appl Math Lett 20:563–570
Acknowledgements
W. Cholamjiak would like to thank the Thailand Research Fund under the Project MRG6080105 and University of Phayao. N. Pholasa would like to thank University of Phayao. S. Suantai was supported by Chiang Mai University.
Author information
Authors and Affiliations
Corresponding author
Additional information
Communicated by Cristina Turner.
Rights and permissions
About this article

Cite this article
Cholamjiak, W., Pholasa, N. & Suantai, S. A modified inertial shrinking projection method for solving inclusion problems and quasi-nonexpansive multivalued mappings. Comp. Appl. Math. 37, 5750–5774 (2018). https://doi.org/10.1007/s40314-018-0661-z
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40314-018-0661-z
Keywords
- Inertial method
- Inclusion problem
- Maximal monotone operator
- Forward–backward algorithm
- Quasi-nonexpansive mapping