
Abstract
In this paper, the local discontinuous Galerkin method is developed to solve the two-dimensional Camassa–Holm equation in rectangular meshes. The idea of LDG methods is to suitably rewrite a higher-order partial differential equations into a first-order system, then apply the discontinuous Galerkin method to the system. A key ingredient for the success of such methods is the correct design of interface numerical fluxes. The energy stability for general solutions of the method is proved. Comparing with the Camassa–Holm equation in one-dimensional case, there are more auxiliary variables which are introduced to handle high-order derivative terms. The proof of the stability is more complicated. The resulting scheme is high-order accuracy and flexible for arbitrary h and p adaptivity. Different types of numerical simulations are provided to illustrate the accuracy and stability of the method.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
In this paper, we consider the two-dimensional Camassa–Holm (2D CH) equation [17, 18, 23]
where \(\mathbf u =(u_1,u_2)^T\) is velocity and
is momentum. In coordinates x, y, the equation reads as follows:
where
The Camassa–Holm (CH) equation was derived as a model to describe the propagation of the gravitational waves in the shallow water. The CH equation has a very intriguing structure, it models wave breaking for a large class of the initial data and is completely integrable. This equation is very important in the literature.
Equation (1.1) is also called Euler–Poincaré equations associated with the diffeomorphism group (EPDiff), which has the same form with the CH equation except for the momentum velocity relationship in two-dimensional case. The CH equation in one-dimensional case is the same as EPDiff equation when the momentum velocity relationship is defined by the Helmholtz equation \(m = u - u_{xx}\) [17]. But the EPDiff equations with the Helmholtz relation between velocity and momentum are not quite the CH equations for surface waves in two-dimensional case. The shallow water wave relation in the 2D CH approximation would be:
rather than the Helmholtz operator form:
The corresponding Lagrangians for the 2D CH equation are:
instead of Lagrangians for the EPDiff equations
This difference was noted in [17, 23]. Holm and Marsden studied the momentum maps and measure-valued solutions (peakons, filaments, and sheets) for the EPDiff equation in [17]. Kraenkel and Zenchuk studied the two-dimensional integrable generalization of the Camassa–Holm equation in [21], and the Lie symmetry analysis and reductions of a two-dimensional integrable generalization of the Camassa–Holm equation in [22]. Kruse proved the symmetry and perturbation theory of a two-dimensional version of the Camassa–Holm equation in [23].
There are lots of numerical works in the literature to solve the CH equation in one dimension, for example finite difference schemes [3, 5, 8, 9, 13, 16, 20, 24, 27, 35,36,37,38], finite-volume schemes [1], finite element schemes [29, 30], discontinuous Galerkin (DG) schemes [26, 28, 33] and other methods [7, 15, 19, 24, 25, 32]. But there is only a few work for the 2D CH equation. The work in [4, 6, 14, 17] presented the numerical simulations for EPDiff equations.
In this paper, we develop a class of local discontinuous Galerkin (LDG) methods by for the 2D CH equation (1.1)–(1.2), which is using completely discontinuous piecewise polynomial space for the numerical solution and the test functions in the spatial variables. The idea of LDG methods is to suitably rewrite a higher-order partial differential equations into a first-order system, then apply the DG method to the system. A key ingredient for the success of such methods is the correct design of interface numerical fluxes. The resulting scheme is high-order accurate, nonlinear stable and flexible for arbitrary h and p adaptivity. The peakon solution is typical solution for this type nonlinear dispersive equation, which is lack of smoothness, and often causes high-frequency dispersive errors into the calculation. The stable and accurate numerical schemes are very important for solving these equations. Comparing with the LDG scheme for 1D CH equation in [33], the main difference between 1D and 2D is that there are a lot of cross terms in the 2D CH equation and it needs to introduce more auxiliary variables, which brings a lot of trouble for the proof of the stability and numerical test.
The LDG techniques have been developed for nonlinear wave equations with high-order derivatives [34]. The stable LDG methods for general nonlinear wave equations which may be system or multidimensional case have been developed. One of the advantage of DG discretization results in an extremely local, element-based discretization, which is maintaining high-order accuracy on unstructured meshes and is beneficial for parallel computing. Furthermore, the proofs of the nonlinear \(L^2\) stability of these methods and successful numerical experiments are also given. These results can prove that the LDG method is an effective tool for nonlinear equations. More detailed information about DG method can be found in [10,11,12].
This paper is organized as follows. We present our LDG method for the 2D CH equation (1.1)–(1.2) and describe the detailed implementation of the method in Sect. 2. In Sect. 3, we prove the energy stability of the LDG method. In Sect. 4, we present the numerical results to demonstrate the capability and the accuracy of the method. Section 5 is concluding remarks.
2 The LDG Method for the 2D CH Equation
2.1 Notation
For a rectangular partition of \([0,L_x]\times [0,L_y]\), we denote the mesh by \(I_{i,j}=[x_{i-\frac{1}{2}},x_{i+\frac{1}{2}}] \times [y_{j-\frac{1}{2}},y_{j+\frac{1}{2}}]\), for \(i=1,\ldots ,N_x\) and \(j=1,\ldots ,N_y\). The cell lengths are denoted by \(h^x_i=x_{i+\frac{1}{2}}-x_{i-\frac{1}{2}}\) and \(h^y_j=y_{j+\frac{1}{2}}-y_{j-\frac{1}{2}}\). We define the piecewise polynomial space \(V_{h}\) as the space of piecewise polynomials of degree up to k, i.e.,
To simplify the notation, we still use u to denote the numerical solution.
We denote by \(u^+_{i+\frac{1}{2},y}\) and \(u^-_{i+\frac{1}{2},y}\) the values of u at \(x_{i+\frac{1}{2}}\), from the right cell \(I_{i+1,j}\) and from the left cell \(I_{i, j}\) when \(y \in [y_{j-\frac{1}{2}},y_{j+\frac{1}{2}}]\), on all vertical edges, respectively. Similarly, we denote by \(u^+_{x,j+\frac{1}{2}}\) and \(u^-_{x,j+\frac{1}{2}}\) the values of u at \(y_{j+\frac{1}{2}}\), from the top cell \(I_{i,j+1}\) and from the bottom cell \(I_{i,j}\), when \(x \in [x_{i-\frac{1}{2}},x_{i+\frac{1}{2}}]\), on all horizontal edges, respectively. We use the usual notations
to denote the jump of the function u, at each element boundary. Define the inner product over the interval \(I_{ij}\) and its sides by:
For simplicity, we use \((v,w), \langle v,w\rangle _x, \langle v,w\rangle _y\) to replace \((v,w)_{ij}, \langle v,w\rangle _{x,ij}, \langle v,w\rangle _{y,ij}\) in the rest of this paper.
2.2 The LDG Method
In this section, we define our LDG method for the 2D CH equation (1.1)–(1.2), written in the following form:
with \(f(u)=\displaystyle \frac{3}{2}u^2\), the initial conditions
and periodic boundary conditions. Notice that the assumption of periodic boundary conditions is for simplicity only and is not essential, in fact, the method can be easily designed for nonperiodic boundary conditions.
2.2.1 LDG Schemes for Equations (2.5) and (2.6)
To define the LDG method, we further rewrite (2.5) and (2.6) as a first-order system:
The LDG methods for (2.10)–(2.13), where \(m_1, m_2\) are assumed known and we would want to solve for \(u_1\), \(u_2\), are formulated as follows: Find \(u_{1}, u_{2}, r_{1}, q_{2} \in V_h\) such that for all test functions \(\phi _1, \phi _2, \phi _3, \phi _4 \in V_h\),
The “hat” terms in (2.14)–(2.17) in the cell boundary terms from integration by parts are called numerical fluxes, which are functions defined on the cell edges and should be designed differently for different equations to ensure stability. For (2.14)–(2.17) we can take the choices such that
2.2.2 LDG Schemes for Equation (2.7)
For (2.7), we can rewrite it into a first-order system:
where \(A(x,y)=xy\), \(B(x)=\frac{1}{2}x^2\) and \(r_1\), \(q_2\) are defined in (2.12)–(2.13).
Now we can define the LDG method for (2.19)–(2.26), resulting in the following scheme: Find \(m_1\), P, S, M, \(q_1\), \(t_2\), \(L_2\), \(L_3 \in V_h\) such that, for all test functions \(\rho _1\), \(\varphi _1\), \(\varphi _3\), \(\varphi _5\), \(\psi _3\), \(\psi _6\), \(\xi _2,\) \(\xi _3 \in V_h\),
-
Scheme for Equation (2.19)
where
Here \(\widehat{f}(u_1^-,u_1^+)\) is numerical flux for nonlinear term \(f(u_1)\). One can choose monotone numerical flux for solving conservation laws: It is Lipschitz continuous in both arguments, consistent (\(\widehat{f}(u_1,u_1)=f(u_1)\)), nondecreasing in the first argument, and nonincreasing in the second argument. We could use the simple Lax–Friedrichs flux which is dissipative numerical flux
The other way is to choose conservative numerical flux as in [2]
2.2.3 LDG Schemes for Equation (2.8)
For (2.8), we can rewrite it into a first-order system:
where \(A(x,y)=xy\), \(B(x)=\frac{1}{2}x^2\) and \(r_1\), \(q_2\) are defined in (2.12)–(2.13).
Now we can define the LDG method for (2.38)–(2.45), resulting in the following scheme: Find \(m_2\), Q, T, N, \(r_2\), \(t_1\), \(L_1\), \(L_4 \in V_h\) such that, for all test functions \(\rho _2\), \(\varphi _2\), \(\varphi _4\), \(\varphi _6\), \(\psi _2\), \(\psi _5\), \(\xi _1\), \(\xi _4 \in V_h\),
-
Scheme for Equation (2.38)
where
The numerical flues for \(\widehat{f(u_2^-,u_2^+)}\) can be chosen as
-
Dissipative numerical flux:
$$\begin{aligned} \widehat{f(u_2^-,u_2^+)}|_{x,{j\pm \frac{1}{2}}}=\frac{1}{2}(f(u_2^+)+f(u_2^-)-\alpha (u_2^+-u_2^-))\Bigl |_{x,{j\pm \frac{1}{2}}},\alpha =\max |f'(u_2)|. \end{aligned}$$(2.48) -
Conservative numerical flux:
$$\begin{aligned} \widehat{f(u_2^-,u_2^+)}|_{x,{j\pm \frac{1}{2}}}=\frac{1}{2}((u_1^+)^2+u_1^+ u_1^-+(u_1^-)^2)\Bigl |_{x,{j\pm \frac{1}{2}}}. \end{aligned}$$(2.49)
We remark that the choices of the fluxes in (2.27)–(2.35) and (2.46)–(2.54) are not unique. There are several choices to ensure the stability.
2.3 Algorithm Flowchart
In this section, we give details related to the implementation of the method.
First, from (2.14)–(2.18), we get \(\mathbf m _h\) in the following matrix form:
where \(\mathbf m _h=(m_1,m_2)^T\), \(\mathbf u _h=(u_1,u_2)^T\).
Second, from (2.27)–(2.37) and (2.46)–(2.56), we obtain the LDG discretization in the following form:
Then, we combine (2.57) and (2.58) to get
Finally, we use a time discretization method to solve
In this paper, we use the Runge–Kutta methods, in fact any standard ODE solvers can be used here.
3 Energy Stability of the LDG Method
In this section, we prove the energy stability of the LDG method for the 2D CH equation. The Lagrangians for the 2D CH equation are:
More details can be seen in [17]. The energy stability of the 2D CH equation is that:
We will prove energy stability of the corresponding numerical solutions of LDG scheme in the following proposition.
Proposition 3.1
The solution to the schemes (2.27)–(2.37) and (2.46)–(2.56) satisfies the energy stability:
-
For dissipative numerical fluxes in (2.29) and (2.48),
$$\begin{aligned} \frac{\mathrm{d}}{\mathrm{d}t}\int _0^{L_x}\int _0^{L_y}\left( u_1^2+u_2^2 +(r_1+q_2)^2\right) \mathrm{d}x\mathrm{d}y\le 0. \end{aligned}$$(3.3) -
For conservative numerical fluxes in (2.30) and (2.49),
$$\begin{aligned} \frac{\mathrm{d}}{\mathrm{d}t}\int _0^{L_x}\int _0^{L_y}\left( u_1^2+u_2^2 +(r_1+q_2)^2\right) \mathrm{d}x\mathrm{d}y=0. \end{aligned}$$(3.4)
To prove the energy stability of the LDG method, we need to choose proper test functions in the LDG scheme.
For (2.14) and (2.15), we first take the time derivative and get:
We choose the test function as follows: (3.5) with \(\phi _1=u_1\), (3.6) with \(\phi _2=u_2\), (2.16) with \(\phi _3=-\displaystyle \frac{\partial {r_1}}{\partial t}-\displaystyle \frac{\partial {q_2}}{\partial t}-P-S-L_2\), (2.17) with \(\phi _4=-\displaystyle \frac{\partial {r_1}}{\partial t}-\displaystyle \frac{\partial {q_2}}{\partial t}-Q-T-L_4\),
We choose the test function as follows: (2.27) with \(\rho _1=u_1\), (2.31) with \(\varphi _1=r_1\), (2.32) with \(\varphi _3=r_1\), (2.33) with \(\varphi _5=r_2\), (2.34) with \(\psi _3=-N\), (2.35) with \(\psi _6=L_1\),
(2.46) with \(\rho _2=u_2\), (2.50) with \(\varphi _2=q_2\), (2.51) with \(\varphi _4=q_2\), (2.52) with \(\varphi _6=q_1\), (2.53) with \(\psi _2=-M\), (2.54) with \(\psi _5=L_3\).
-
Main Energy Equation
Adding equations from (3.7) to (3.22), we can get the main energy equation for proving \(L^2\) stability.
The left side of the equation is:
where we use the following equality:
The right side of the equation is:
where
Combining Eqs. (3.23) and (3.26), we get the main energy equation
-
Proof for \(\mathbb {A}_{i,j}+\mathbb {B}_{i,j} +\mathbb {C}_{i,j}+\mathbb {D}_{i,j}+\mathbb {E}_{i,j} +\mathbb {F}_{i,j}\) terms in (3.33)
In the following, we will prove \(\mathbb {A}_{i,j}+\mathbb {B}_{i,j} +\mathbb {C}_{i,j}+\mathbb {D}_{i,j}+\mathbb {E}_{i,j}+\mathbb {F}_{i,j}\) terms in (3.33) are nonnegative or zero.
Lemma 3.2
With the dissipative numerical fluxes in (2.29) and (2.48) or conservative numerical fluxes in (2.30) and (2.49), we have
or
Proof
Dissipative numerical fluxes
As for \(\mathbb A_{i,j}\):
where
and \(F(u)=\int ^uf(t)\mathrm{d}t\). With the monotonicity of \(\widehat{f(u_1)}\), we have
Then we can finally get \(\Theta _{i-\frac{1}{2},j}\ge 0\). Summing up (3.34) over i, j and taking into account the periodic boundary condition, we obtain
Using the same argument, we immediately know
Conservative numerical fluxes
Proof is similar to the monotone case and [2], we omit the detail of the proof. \(\square \)
Lemma 3.3
If the numerical fluxes are chosen as
or
then we have
Proof
Similar to the proof in Lemma 3.2.
where
With numerical fluxes in (3.38) or (3.39) and algebraic calculation, we easily obtain:
Summing up (3.40) over i, j and taking into account the periodic boundary condition, we obtain
\(\square \)
Lemma 3.4
If the numerical fluxes are chosen as
or
then we have
Proof
The proof is similar to Lemma 3.3. \(\square \)
Corollary 3.5
With the definition of numerical fluxes in schemes (2.27)–(2.35) and (2.46)–(2.54), we have
Proof
The results in this Corollary can be obtained by using Lemma 3.3 and Lemma 3.4. \(\square \)
Lemma 3.6
If the numerical fluxes are chosen as
or
then we have









Proof
Similar to the proof in Lemma 3.3
where
With numerical fluxes in (3.45) or (3.46) and algebraic calculation, we easily obtain:
Summing up (3.47) over ij and taking into account the periodic boundary condition, we obtain
\(\square \)
Lemma 3.7
If the numerical fluxes are chosen as
or
then we have
Proof
The proof is similar to Lemma 3.6. \(\square \)
Corollary 3.8
With the definition of numerical fluxes in schemes (2.27)–(2.35) and (2.46)–(2.54), we have
Proof
The results in this Corollary can be obtained by using Lemmas 3.6 and 3.7. It is worth to mention that although the terms regarding the derivatives of t in Eqs. (3.31) and (3.32) look a little different from the terms in Lemmas 3.6 and 3.7, we just need to treat the terms regarding the derivatives of t as normal terms, then Lemmas 3.6 and 3.7 also work. \(\square \)
Summing up the main energy equation (3.33) over ij and taking into account the periodic boundary condition, we obtain the following results by using Lemma 3.2, Corollarys 3.5 and 3.8.
-
For dissipative numerical fluxes,
$$\begin{aligned} \sum \limits _{i,j}\left( \mathbb {A}_{i,j}+\mathbb {B}_{i,j} +\mathbb {C}_{i,j}+\mathbb {D}_{i,j}+\mathbb {E}_{i,j} +\mathbb {F}_{i,j}\right) \ge 0. \end{aligned}$$Then we have
$$\begin{aligned}&\sum \limits _{i,j}\left( \left( \frac{\partial u_1}{\partial t},u_1\right) +\left( \frac{\partial u_2}{\partial t},u_2\right) +\left( r_1+q_2, \frac{\partial }{\partial t}({r_1}+q_2) \right) \right) \nonumber \\&\quad =-\sum \limits _{i,j}\left( \mathbb {A}_{i,j}+\mathbb {B}_{i,j} +\mathbb {C}_{i,j}+\mathbb {D}_{i,j}+\mathbb {E}_{i,j} +\mathbb {F}_{i,j}\right) \nonumber \\&\quad \le 0. \end{aligned}$$(3.52) -
For conservative numerical fluxes,
$$\begin{aligned} \sum \limits _{i,j}\left( \mathbb {A}_{i,j}+\mathbb {B}_{i,j} +\mathbb {C}_{i,j}+\mathbb {D}_{i,j}+\mathbb {E}_{i,j} +\mathbb {F}_{i,j}\right) = 0. \end{aligned}$$Then we have
$$\begin{aligned}&\sum \limits _{i,j}\left( \left( \frac{\partial u_1}{\partial t},u_1\right) +\left( \frac{\partial u_2}{\partial t},u_2\right) +\left( r_1+q_2, \frac{\partial }{\partial t}({r_1}+q_2) \right) \right) \nonumber \\&\quad =-\sum \limits _{i,j}\left( \mathbb {A}_{i,j}+\mathbb {B}_{i,j} +\mathbb {C}_{i,j}+\mathbb {D}_{i,j}+\mathbb {E}_{i,j} +\mathbb {F}_{i,j}\right) \nonumber \\&\quad =0. \end{aligned}$$(3.53)
This gives the energy stability results in (3.3) and (3.4). \(\square \)
4 Numerical Results
In this section, we give numerical solutions for different initial value to demonstrate the accuracy and capability of the LDG method. In this paper, we use the third-order explicit TVD Runge–Kutta method [31] as time discretization. The CFL number is 0.01, and time step is \(\bigtriangleup t = 0.01 \bigtriangleup x\).
Example 4.1
Smooth solution
In this example, we test the smooth solution to calculate the order of the LDG scheme for the 2D CH equation with right-hand source terms
with the exact solutions:
initial conditions:
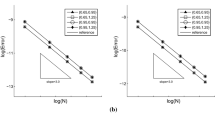
and periodic boundary condition over \([0,2\pi ]\times [0,2\pi ]\) . We can see that the method with \(P^k\) elements gives a uniform (\(\hbox {k}\,+\,1\))-th order of accuracy for \(u_1\) and \(u_2\) in Table 1.
Example 4.2
Peakon solution for the simplest case
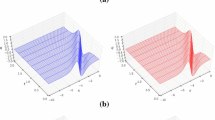
The peakon solutions of the 2D CH equation are well known and we first display the simplest case that \(u_1\) doesn’t have y, and \(u_2\) doesn’t have x whose exact solutions read as:
with the initial conditions:
and periodic boundary condition. Uniform meshes with \(80\times 80\), \(P^4\) elements over \([-\,10,10]\times [-\,10,10]\). We can see the solutions in Figs. 1 and 2. We can find that the peakon is moving evenly over time.
Example 4.3
Peakon solution when the angle is \(45^\circ \)
In this example, we test the peakon solution for the 2D CH equation (2.5)–(2.8) with exact solutions read as:
and the initial conditions
with Dirichlet boundary condition. Uniform meshes with \(80\times 80\), \(P^4\) elements over \([-\,10,10]\times [-\,10,10]\). Since the solutions of \(u_1\) and \(u_2\) are the same, we only present the solution for \(u_1\). We can see the solutions in Fig. 3. This kind of one peakon solution will propagate with the velocity in the direction with an angle to the positive x-axis.
Example 4.4
Two-peakon interaction for simplest case
In this example, we consider the two-peakon interaction of the 2D CH equation with the initial conditions:
where
where \(a_1=2,x_1=5,a_2=1,x_2=0,b_1=2,y_1=5,b_2=1,y_2=0\). Periodic boundary condition. Uniform meshes with \(160\times 160\), \(P^4\) elements over \([-\,20,20]\times [-\,20,20]\). Since the solutions of \(u_1\) and \(u_2\) are the same, we only present the solution for \(u_1\). The two-peakon interaction at \(\hbox {t} = 0, 1, 3\), and 8 is shown in Fig. 4. We can see clearly that the moving peakon interaction is resolved very well.
Example 4.5
Two-peakon interaction when the angle is \(45^\circ \)
In this example, we also consider the two-peakon interaction of the 2D CH equation with the initial conditions:
where
where \(a_1=2,c_1=3\sqrt{2},a_2=1,c_2=0,b_1=2,d_1=3 \sqrt{2},b_2=1,d_2=0\). Periodic boundary condition. Uniform meshes with \(160\times 160\), \(P^4\) elements over \([-\,20,20]\times [-\,20,20]\). Since the solutions of \(u_1\) and \(u_2\) are the same, we only present the solution for \(u_1\). The solutions are shown in Fig. 5 with the two-peakon interaction at t = 0, 1, 3, and 8. We can see clearly that the moving peakon interaction is also resolved very well.
Example 4.6
Peakon solution when \(u_1 \ne u_2\)
In this example, we display the peakon solutions when \(u_1 \ne u_2\) whose exact solutions read as:
with the initial conditions:
and Dirichlet boundary condition. Uniform meshes with \(80\times 80\), \(P^4\) elements over \([-\,10,10]\times [-10,10]\). We can see the solutions in Figs. 6 and 7. We can find that the peakon is moving evenly over time.
Example 4.7
Two-peakon interaction when \(u_1 \ne u_2\)
In this example, we display two-peakon interaction when \(u_1 \ne u_2\) whose exact solutions read as:
with the initial conditions:
and Dirichlet boundary condition. Uniform meshes with \(160\times 160\), \(P^4\) elements over \([-\,20,20]\times [-\,20,20]\). We can see the solutions in Figs. 8 and 9. We can find that the peakon is moving evenly over time.
5 Conclusion
In this paper, we have developed an LDG method for solving the 2D CH equation and proved the energy stability for this method. The main difference of CH equation between 1D and 2D is there have a lot of cross terms in the 2D CH equation, which brings much trouble for the proof of the stability and numerical test. We have also given several numerical simulation results to illustrate accuracy and capability of the LDG method. In future, the conservative schemes in time and the theoretical analysis for the LDG scheme, such as error estimates, will be our further research topics.
References
Artebrant, R., Schroll, H.J.: Numerical simulation of Camassa Holm peakons by adaptive upwinding. Appl. Numer. Math. 56, 695–711 (2006)
Bona, J.L., Chen, H., Karakashian, O., Xing, Y.: Conservative, discontinuous-Galerkin methods for the generalized Korteweg–de Vries equation. Math. Comput. 82, 1401–1432 (2013)
Cai, W., Sun, Y., Wang, Y.: Geometric numerical integration for peakon b-family equations. Commun. Comput. Phys. 19, 24–52 (2016)
Camassa, R., Kuang, D., Lee, L.: Solitary waves and N-particle algorithms for a class of Euler–Poincaré equations. Stud. Appl. Math. 137, 502–546 (2016)
Cao, H.Y., Sun, Z.Z., Gao, G.H.: A three-level linearized finite difference scheme for the Camassa–Holm equation. Numer. Methods Partial Differ. Eq. 30, 451–471 (2014)
Chertock, A., Du Toit, P., Marsden, J.E.: Integration of the EPDiff equation by particle methods, ESAIM. Math. Model. Numer. Anal. 46, 515–534 (2012)
Chertock, A., Liu, J.G., Pendleton, T.: Convergence of a particle method and global weak solutions of a family of evolutionary PDEs. SIAM J. Numer. Anal. 50, 1–21 (2012)
Chiu, P.H., Lee, L., Sheu, T.W.H.: A dispersion-relation-preserving algorithm for a nonlinear shallow-water wave equation. J. Comput. Phys. 228, 8034–8052 (2009)
Chiu, P.H., Lee, L., Sheu, T.W.H.: A sixth-order dual preserving algorithm for the Camassa–Holm equation. J. Comput. Appl. Math. 233, 2767–2778 (2010)
Cockburn, B., Karniadakis, G.E., Shu, C.-W.: The development of discontinuous Galerkin methods, in n Discontinuous Galerkin Methods: Theory, Computation and Applications, Cockburn, B., Karniadakis, G., Shu, C.-W., editors, Lecture Notes in Computational Science and Engineering, vol. 11, Springer, Berlin, Part I: Overview, pp. 3–50 (2000)
Cockburn, B., Shu, C.-W.: Runge–Kutta Discontinuous Galerkin methods for convection-dominated problems. J. Sci. Comput. 16, 173–261 (2001)
Cockburn, B., Shu, C.-W.: Foreword for the special issue on discontinuous Galerkin method. J. Sci. Comput. 22(23), 1–3 (2005)
Coclite, G.M., Karlsen, K.H., Risebro, N.H.: An explicit finite difference scheme for the Camassa–Holm equation. Adv. Differ. Eq. 13, 681–732 (2008)
Cotter, C., Holm, D.: Momentum Maps for Lattice EPDiff. Handbook of Numerical Analysis. Vol. XIV. Special volume: Computational Methods for the Atmosphere and the Oceans, pp. 247–278, Handb. Numer. Anal., 14, Elsevier/North-Holland, Amsterdam, (2009)
Feng, B.F., Maruno, K., Ohta, Y.: A self-adaptive moving mesh method for the Camassa–Holm equation. J. Comput. Appl. Math. 235, 229–243 (2010)
Gong, Y., Wang, Y.: An energy-preserving wavelet collocation method for general multi-symplectic formulations of Hamiltonian PDEs. Commun. Comput. Phys. 20, 1313–1339 (2016)
Holm, D., Marsden, J.: Momentum Maps and Measure-Valued Solutions (Peakons, Filaments, and Sheets) for the EPDiff Equation, The Breadth of Symplectic and Poisson Geometry, 203–235, Progress in Mathematics, 232. Birkhäuser Boston, Boston (2005)
Holm, D., Schmah, T., Stoica, C.: Geometric mechanics and symmetry. From finite to infinite dimensions. With solutions to selected exercises by David Ellis, C.P., Oxford Texts in Applied and Engineering Mathematics, 12. Oxford University Press, Oxford, (2009)
Holden, H., Raynaud, X.: A convergent numerical scheme for the Camassa–Holm equation based on multipeakons. Discrete Contin. Dyn. Syst. 14, 505–523 (2006)
Holden, H., Raynaud, X.: Convergence of a finite difference scheme for the Camassa–Holm equation. SIAM J. Numer. Anal. 44, 1655–1680 (2006)
Kraenkel, R.A., Zenchuk, A.I.: Two-dimensional integrable generalization of the Camassa–Holm equation. Phys. Lett. A 260, 218–224 (1999)
Kraenkel, R.A., Senthilvelan, M., Zenchuk, A.I.: Lie symmetry analysis and reductions of a two-dimensional integrable generalization of the Camassa–Holm equation. Phys. Lett. A 273, 183–193 (2000)
Kruse, H.-P., Scheurle, J., Du, W.: A Two-Dimensional Version of the Camassa–Holm Equation, Symmetry and Perturbation Theory, pp. 120–127. World Science Publisher, River Edge (2001). (Cala Gonone, 2001)
Kalisch, H., Lenells, J.: Numerical study of traveling-wave solutions for the Camassa–Holm equation. Chaos Solitons Fractals 25, 287–298 (2005)
Kalisch, H., Raynaud, X.: Convergence of a spectral projection of the Camassa–Holm equation. Numer. Methods Partial Differ. Eq. 22, 1197–1215 (2006)
Li, M., Chen, A.: High order central discontinuous Galerkin-finite element methods for the Camassa–Holm equation. Appl. Math. Comput. 227, 237–245 (2014)
Liu, H., Pendleton, T.: On invariant-preserving finite difference schemes for the Camassa–Holm equation and the two-component Camassa–Holm system. Commun. Comput. Phys. 19, 1015–1041 (2016)
Liu, H., Xing, Y.: An invariant preserving discontinuous Galerkin method for the Camassa–Holm equation. SIAM J. Sci. Comput. 38, A1919–A1934 (2016)
Matsuo, T.: A Hamiltonian-conserving Galerkin scheme for the Camassa–Holm equation. J. Comput. Appl. Math. 234, 1258–1266 (2010)
Miyatake, Y., Matsuo, T.: Energy-preserving \(H^1\)-Galerkin schemes for shallow water wave equations with peakon solutions. Phys. Lett. A 376, 2633–2639 (2012)
Shu, C.-W., Osher, S.: Efficient implementation of essentially nonoscillatory shock capturing schemes. J. Comput. Phys. 77, 439–471 (1988)
Wang, Z.Q., Xiang, X.X.: Generalized Laguerre approximations and spectral method for the Camassa–Holm equation. IMA J. Numer. Anal. 35, 1456–1482 (2015)
Xu, Y., Shu, C.-W.: A local discontinuous Galerkin method for the Camassa–Holm equation. SIAM J. Numer. Anal. 46, 1998–2021 (2008)
Xu, Y., Shu, C.-W.: Local discontinuous Galerkin methods for high-order time-dependent partial differential equations. Commun. Comput. Phys. 7, 1–46 (2010)
Yu, C.H., Sheu, T.W.H., Chang, C.H., Liao, S.J.: Development of a numerical phase optimized upwinding combined compact difference scheme for solving the Camassa–Holm equation with different initial solitary waves. Numer. Methods Partial Differ. Equ. 31, 1645–1664 (2015)
Yu, C.H., Sheu, T.W.H.: Development of a combined compact difference scheme to simulate soliton collision in a shallow water equation. Commun. Comput. Phys. 19, 603–631 (2016)
Yu, C.H., Sheu, T.W.H.: Numerical study of long-time Camassa–Holm solution behavior for soliton transport. Math. Comput. Simul. 128, 1–12 (2016)
Zhang, Y., Deng, Z.C., Hu, W.P.: Multisymplectic method for the Camassa-Holm equation. Adv. Differ. Eq. 2016, 7 (2016)
Author information
Authors and Affiliations
Corresponding author
Additional information
Research supported by NSFC Grant Nos. 11722112, 91630207.
Rights and permissions
About this article

Cite this article
Ma, T., Xu, Y. Local Discontinuous Galerkin Methods for the Two-Dimensional Camassa–Holm Equation. Commun. Math. Stat. 6, 359–388 (2018). https://doi.org/10.1007/s40304-018-0140-2
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40304-018-0140-2