
Abstract
Being man–machine interaction, the use of surface electromyogram (sEMG) is increasing day by day. Generally, sEMG is a complex signal and is influenced by several external factors/artifacts. As removing these artifacts is not easy, feature extraction to obtain useful information hidden inside the signal becomes a different process. This paper presents methods of analyzing sEMG signals using discrete wavelet transform for extracting accurate patterns of the sEMG signals. The results obtained suggest having a good compromise between the percentage root mean square differences, root mean square difference value for the denoising and quality of reconstruction of the sEMG signal. Further a one way separated factorial analysis was performed to find out the effectiveness of analyzed sEMG signal for discrimination among different classes of groups Various possible types of wavelets with high level parameters were tested for denoising and results show that the best mother wavelets for tolerance of noise are fifth order of symmlets and bior6.8 whereas for reconstruction, wavelet functions bior5.5 and sym3 were the best.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
The electromyogram (EMG) is the recording of muscle electrical activity and is measured by electrodes affixed to the surface of the skin, above the muscle of interest so that rich useful information can be obtained from the muscles. Researchers can use such information in a wide class of clinical and engineering applications. Currently, sEMG is largely used to determine binary states, such as high/low contraction strength or fatigued/not fatigued muscles.
In order to use the EMG signal as a diagnostic tool or a control signal, its features are often extracted before proceeding to classification stage. Attempts are being made to improve signal processing to obtain more information about the underlying muscles from sEMG and for that various processing techniques have been applied to surface electromyography (sEMG) [1]. In order to predict the effect of sEMG corresponding to voluntary muscle contraction, various models have been developed by researchers [2].
With computers and software becoming more and more powerful tools to process complex algorithms on large data at high speed, sEMG features can be computed in numerical form from a finite length time interval which changes as a function of time, i.e. a voltage or a frequency. They can be computed in time domain, frequency domain, and time frequency representations. However, frequency domain features show better performance than other-domain features in case of assessing the muscle fatigue [3]. Fourier transform based spectral analysis is the dominant analytical tool for frequency domain analysis. However, Fourier transform cannot provide any information about the spectrum changes with respect to time. To overcome this deficiency, an alternative mathematical tool-wavelet transform is selected to extract the relevant time–amplitude information from a signal [4].
The term denoising has been proposed for formal interpretation and to show how wavelet transforms may be used to optimally “de-noise” the interpretation of sEMG signal [5]. Wavelet-based noise removal is preferred over signal frequency domain filtering because it can maintain signal characteristics even while reducing noise. This is because a number of threshold strategies are available, allowing reconstruction based on selected coefficients. The aim of this study was to evaluate the wavelet denoising for optimal motor unit action potential (MUAP) detection through the wavelet decomposition and reconstruction. In this study, all wavelet functions (WFs) of Symmlets (symx)) and biorthogonal (Biorthogonal (biorx_x)), where x indicates the order of the wavelet, families were explored for the wavelet transform (WT). The root mean square [6] differences (RMSD), and wavelet power, were calculated to quantify the most effective WFs. Reconstruction qualities were measured by signal to noise ratio (SNR) and percentage root mean square difference (PRD). In this paper, experiments and data acquisition are given in Sect. 2. Section 3 presents a description of wavelet denoising methods. Results and discussion are reported in Sect. 4, and finally the conclusion is drawn in Sect. 5.
2 Experiment and Data Acquisition
2.1 Proposed sEMG Setup
The sEMG signal detection experimental setup consists of a differential amplifier, non-inverting amplifier, and filter circuit. SEMG, a noninvasive technique for measuring the electrical potentials of active motor units (MUs), is strongly influenced by the characteristic of the electrodes such as dimension, shape, materials, technology processes, distance between the electrode surfaces, and location of the electrodes on the surface of the muscles. So electrodes were placed firmly on the skin to avoid unstable skin contact by using strap wrapped around the arm. According to various researchers [7, 8], the membrane potential in the muscle is about -90 mV with the range of measured sEMG potential lying between 0 and 10 mV (peak to peak) with frequency range of 2–10 kHz having the most relevant information below 500 Hz. In the next stage interfacing was done to connect the SEMG signal amplifier circuit to the computer through data acquisition card (DAQ). Labview based code was initialized for acquiring the data. When recorded using bipolar surface electrodes, the sEMG signal can be described by
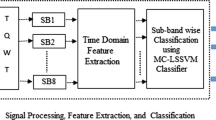
where fA and fB are the location of electrodes. Three healthy male volunteers, age 22–28 years, weight 55–90 kgs, height of 165–180 cm participated in the complete part of this experiment. They were not informed of what the experiment was about. The sEMG signal was recorded from two upper-arm muscles, the biceps (A) and triceps brachii (B) individually, both with three level of force contraction i.e. low, medium and high with maximum time of 3 s while the simple form of pre-gelled Ag/AgCl passive electrodes with bipolar configuration were used for signal acquisition. The signals picked up by the bipolar electrodes were transmitted to amplifier with an amplitude gain of 1000 and CMRR >90 dB. In the experiment, if active and reference electrodes were placed very close to each other, signals from both were almost same. Therefore, in order to extract spectral components that contain important information about the signal, electrodes placement as far as possible from each other in transverse direction was done [9]. The recorded sEMG signals were processed and analyzed with LABVIEW Wavelet toolbox. The diagram for whole system is shown above in Fig. 1.

Flow chart for complete system
The recorded raw sEMG signal waveform was filtered through Band pass filter, incorporating high pass filtering with cut off frequency of 10 Hz to attenuate movement artifacts and noise, with low pass filtering with cut off frequency of 500 Hz to remove high frequency components to avoid signal aliasing. The amplification is necessary to optimize the resolution of the digitizing equipment.
3 Methodology
Wavelet transforms being a mathematical function has proved to be very powerful for signal compression, since it analyzes the signal both in time and frequency domain. Discrete wavelet transform is a multi-resolution/multi-frequency representation. The objective of wavelet denoising algorithm is to discard the noise e(n) to recover the signal of interest f(n). The model is basically of the following form:
The step wise refinement procedure of wavelet denoising removes interference noise and is able to analyze sEMG signal.
3.1 Wavelet Decomposition
The ability of the WT depends on the appropriate choice of the mother WF. Even though there is no well-defined rule for selecting a wavelet basis function in a particular application or analysis, some properties of the wavelets make a specific mother wavelet more suitable for a given application and signal type [10]. The first step of wavelet denoising procedure is selection of WF or mother wavelet which helps in the perfect reconstruction of signal. Next step is the selection of the number of decomposition levels of signal. Previous research shows [6] the decomposition levels that is suitable for EMG signals. Accordingly, four levels of decomposition were considered in these papers.
According to Fig. 2, after the four levels of decomposition, cD1 [n], cD2 [n], cD3 [n] and cD4 [n] detail coefficients (high frequency component) and cA4 [n] approximation coefficients (low frequency component) were the available coefficients of the transform. After that, the threshold value (THR) is fixed and is applied to the cDs coefficients. Finally, the denoised EMG signal is reconstructed based on the modified detail (Ds) and the retained approximation (As) coefficient [11].

Four levels of wavelet decomposition tree
3.1.1 Wavelet Reconstruction
Reconstruction of a signal is done by using the inverse wavelet transform. Generally, the inverse transform is performed by using the coefficients of all the components of the final-level decomposition, that is the fourth-level approximation and the first four levels of detail (cA4, cD1, cD2, cD3, and cD4). Figure 3 gives the four levels of wavelet reconstruction where the approximation coefficient A4 [n] and detail coefficient D4 [n] are passed through the low-pass and high-pass filters and then added accordingly, the process continues until the denoised SEMG signal s[n] is achieved.

Four levels of wavelet reconstruction tree
3.2 Evaluation
RMS difference (RMSD): The RMS difference of the contaminated signal x[n] compared with the signal of interest f[n] is defined by
where ‘x’ is the raw SEMG signal and ‘f’ is the signal of interest, n is the total number of samples (length of data). The RMS difference is calculated for various WFs. According to equation, greater the value of RMS difference better is the denoising performance of that WF.
Reconstruction [12] qualities were measured by SNR and PRD. These criteria are defined as follow: PRD is the most used quantity in scientific works and can be defined as
where xorg is the original and srec reconstructed signal. PRD is linked to SNR by a negative logarithmic function:
The quality of reconstructed signal is good if the value of percentage root mean square difference is less.
SNR calculation: The SNR is calculated using
where Xn represents the raw signal and Xe denoised signal. Higher the value of negative SNR (−dB), the better the performance of the WF.
In an order to understand the sEMG signal’s behavior, the measurements were carried with different level of muscular contractions i.e. with Low and High sEMG.
4 Results and Discussion
The critical point in wavelet denoising is the selection of right WF which depends on the application and characteristics of signal. The objective of this study was to investigate the best wavelet denoising method being applied to the sEMG signal at different force contraction levels. In this experiment the appropriate WF was chosen on the basis of the calculated RMS difference, variance and SNR values of sEMG signals for different subjects. We adopted twenty-one WFs including all WFs of Symmlets (symx) and Biorthogonal families for decomposition purpose. The root mean square values were computed for each signal and force data file, as this is the parameter that more completely reflects the physiological correlates of the MU behavior during a muscle contraction and has been termed as ‘gold’ standard for analyzing sEMG signal. The raw EMG signals were used to calculate the RMS difference, wavelet denoised power and signal to noise (SNR) values for Bior (all family) and Symm (all family) with four levels of decomposition WFs. Table 1 gives the results of the average RMS at various muscle contraction positions and Table 2 gives the total noise level values of chosen functions.
According to the results, among two independent families, in Table 2, the WFs: bior6.8 and sym2 give good results compared to the other families in regard of denoising. Table 3 presents result for WF based signal analysis, bior6.8 and sym2 functions are appropriate for class separability. Table 4 gives the results for the average RMS difference, PRD and SNR values using bior6.8 WF. SEMG signals computed at different contraction levels for wavelet sym2 and bior6.8 is shown in Figs. 4 and 5. Figure 6 gives the raw signal and reconstructed sEMG signal at various wavelet coefficient subsets. Different WFs were investigated to optimize wavelet denoising procedure.

Raw and denoised sEMG signal at various voluntary contractions for subject 1 using sym2 at fourth levels of decomposition: a low, b medium, c high contraction level

Raw and denoised sEMG signal at various voluntary contractions for subject 1 using bior6.8 at fourth levels of decomposition: a low, b medium, c high contraction level

Example of the sEMG signal using wavelet multi-resolution analysis with bior6.8 wavelet with 4 level decomposition and reconstruction. a Raw EMG signal and the reconstructed EMG signals (D1–D4, A4). b Raw signal and the wavelet coefficient subsets (cD1–cD4, cA4) of subject 1
In Fig. 6a, the signals obtained from the raw sEMG through decomposition process (Step I) and the reconstructed EMG signals at different multi-resolution (Step III) levels are presented whereas the signals between the decomposition level and the wavelet coefficient subsets (Step II) at different multiresolution levels are presented in Fig. 6b. Generally the low frequency components can be considered as the identity of its signal, whereas high frequency components as the noises. However, from Fig. 6a, b the low frequency component contains irrelevant low indirect correspondence and contains the resolution background whereas the signals at the first and the second decomposition levels (cD1 and cD2) and reconstruction levels (D1 and D2) are similar [13] to the original signal (S). So the signals (cD1, cD2, D1, and D2) are the effective sEMG information part.
In order to obtain the estimated signal from approximation coefficient subset only, the reconstructed EMG signal (A4) is inversed by using the coefficients of the fourth-level approximation (cA4) only. Therefore, we obtain the reconstructed EMG signals, namely A4, D4, D3, D2, and D1 that are reconstructed from cA4, cD4, cD3, cD2, and cD1, respectively.
Since WF bior6.8 and sym2 show better performance compared to others, can be considered for sEMG signal denoising process. Results for different force contraction levels are presented in Table 5 in respect of feature extraction for two cases: the sEMG signal (a) with wavelet denoising; (b) without wavelet denoising. The denoising method is used for filtering the noise and by performing the filtration, the presence of noise in the signal is even less (Fig. 7).

a, b Plots comparing Table 5 parameters
4.1 Data Statistical Method
Here one is interested in refining the experiment to increase its sensitivity for detecting differences in the dependent variables. An effective step to achieve better performance for the classification of signal recorded at different voluntary contractions is the extraction of feature from the raw data before performing the multiple activities. The analysis of extracted features further helps to identify the significance of the sEMG based muscular -force relationship existing in between them for the voluntary contractions.
As the electrical activity of muscles being measured by sEMG exhibits nonlinearity, it was thought that the statistical theory may be a better approach than traditional linear methods in characterizing the intrinsic nature of signal. This type of characterization can contribute to the understanding of the signal dynamics and underlying muscles processes. Therefore, statistical techniques were implemented for the interpretation of arm operations in order to identify the best sEMG signal amplitude for different motions with different muscle positions. The analysis of variance (ANOVA) results with three independent groups for for raw, bior6.8 wavelet coefficients is shown in Tables 6 and 7.
A significant F-ratio indicates that the population means are probably not all equal. Since the estimate of data for sum of square between the group (SSB, 0.270, 0.212) is large compared to data for within the group (SSW, 0.011, 0.008) for raw (RMS) and denoised (RMSD) data, so it is concluded the test statistic is significant at this level. The mean square error of sEMG signal helps to evaluate the quality of robustness function. The performance of algorithms is the best when mean square error has the smallest value, here the mean square error (MSE) value between the group and within the group is 0.135, 0.106 and 0.001, 0.001 respectively for raw and denoised data with biceps muscle, means the sEMG signal contains useful information and undesirable part of the signals are removed at hardware and software implementation.
The F-ratio is the statistic used to test the hypothesis that the effects are real: in other words, that the means are significantly different from one another. There is a significant difference in amplitude gain across different motions, F(2, 6) = 73.63 and F(2, 6) = 72.81 with raw RMS and RMSD data respectively for bicep muscle with three independent voluntary contractions groups. From the Tables, since F ratio is greater than critical value (fc) for both cases, so means are significantly different and it is concluded that there is significant difference between the groups (SSB) than within groups (SSW). On experimental data, analysis of variance revealed the continuous significant differences over time, which means this technique is useful for revealing differences in the shape and magnitude of sEMG signals for independent motions. Thus analysis of variance found statistical differences between electrode positions (p < 0.05), surface electrode conditions, and the interaction between all groups.
The analysis of variance based system has been shown to be very accurate in discriminating three independent classes (G1–G3) of motion. The development of this technique is as important as classification accuracy in terms of usability. The steady-state data in the experiment comprises of different contractions that are of almost the same intensity for both analytical cases; although all the subjects were not asked to maintain a constant level of force efforts.
5 Conclusion
Denoising of sEMG signal by wavelets was attempted, and it has found that this approach as a feature extraction algorithm clearly brings out important information inherent inside sEMG signal. The study was motivated by the fact that there is no universal mother wavelet suitable for all types of sEMG signals [10]. Noise contaminated in the sEMG signals is the main problem in the analysis of the sEMG signal in engineering applications. The objective of this paper was to make use of wavelet transform algorithm in pre-processing stage of sEMG signal analysis, particularly for the noise reduction. Hence, numerous wavelet denoising techniques have been employed during the study. According to reported results during this study, following conclusions can be drawn:
-
1.
In Step I extraction, the best WFs are bior6.8 and sym5 (based on RMS difference value). However, bior5.5 and sym2 provide marginally better performance and are appropriate for signal denoising.
-
2.
In Step II extraction, robustness and class separability were considered, bior6.8 and sym2 are appropriate for wavelet based signal analysis (calculating the wavelet power). However, bior5.5 and sym6 provides marginally better performance and can be used.
-
3.
In Step III extraction, bior5.5 and sym3 provide the best reconstruction for sEMG signal (based on percentage root mean square difference (PRD).
So the main benefit of the wavelet transform is the generation of useful subset of the frequency components from the signal. In this study, from effective wavelet components, we have investigated the best correlation of sEMG signal suitable for multifunction myoelectric control system.
In summary, the reconstructed sEMG signals from the first level and the second level of the wavelet’s detail coefficients are most suitable for the extraction of sEMG features and are recommended for SEMG studies, whereas other wavelet components contain noisy parts and are fails to improve classification ability. The process decreases the computational time and complexity, by reducing the signal in sub-signals and hence wavelet proves as powerful complement tool for noise removal. Finally, experimental results show that WFs bior1.5, bior3.1and bior3.3 are not recommended to use in any refinement process.
References
Kilby J, Hosseini Gholam H (2006) Extracting effective features of SEMG using continuous wavelet transform. In: Proceedings of the 28th IEEE EMBS annual international conference, pp 1704–1707. New York City, USA
Katherine WA, Hiroshima S, Dinesh KK, Sridhar AP (2010) A sEMG model with experimentally based simulation parameters. In: Proceedings of the 32nd annual international conference of the IEEE EMBS Buenos, pp 4258-4261. Buenos Aires, Argentina
Englehart K, Hudgin B, Parker P (2001) A wavelet-based continuous classification scheme for multifunction myoelectric control. IEEE Trans Biomed Eng 48:302–311
Phinyomark A, Phukpattaranont P, Limsakul C (2012) The usefulness of mean and median frequencies in electromyography analysis-chapter 8. In: Computational intelligence in electromyography analysis: a perspective on current applications and future challenges, pp 195–220. InTech, ISBN:978-953-51- 0805-4
Ching CP, So CH, Wu QS (1999) On wavelet denoising and its applications to time delay estimation. IEEE Trans Signal Process 47:2879–2882
David DL (1995) De-noising by soft-thresholding. IEEE Trans Inf Theory 41:613–627
Veer K, Agarwal R (2015) Wavelet and short-time Fourier transform comparison-based analysis of myoelectric signals. J Appl Stat 42:1591–1601
Rodrigo OL, Ricardo MN, Roberto PR, Cabral M, Cristina N, José PC, Alberto C (2010) Evaluation of adaptive/nonadaptive filtering and wavelet transform techniques for noise reduction in EMG mobile acquisition equipment. IEEE Trans Neural Syst Rehabil Eng 11:60–69
Silvestro M (2010) Control of hand prostheses using peripheral information. IEEE Rev BME 3:48–68
Reaz MBI, Hussain MS, Mohd-Yasin F (2006) Techniques of EMG signal analysis: detection processing, classification and applications. IEEE Trans Biomed Eng 10:11–35
Veer K (2015) A technique for classification and decomposition of muscle signal for control of myoelectric prostheses based on wavelet statistical classifier. Measurement 60:283–291
Phinyomark A, Phukpattaranont P, Limsakul C (2011) Wavelet-based denoising algorithm for robust EMG pattern recognition. Fluct Noise Lett 10:157–167
Ntsama PE, Ele P, Kabiena BI (2013) Compression approach of EMG signal using 2D discrete wavelet and cosine transforms. Am J Signal Process 3:10–16
Acknowledgments
The author is grateful to Dr. Amod Kumar, Chief Scientist, CSIO-Chandigarh for helping in writing this manuscript.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Veer, K. Wavelet Transform to Recognize Muscular: Force Relationship Using sEMG Signals. Proc. Natl. Acad. Sci., India, Sect. A Phys. Sci. 86, 103–112 (2016). https://doi.org/10.1007/s40010-015-0245-x
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40010-015-0245-x