
Abstract
An analysis is carried out to study the time-dependent flow of an incompressible electrically conducting fourth-grade fluid over an infinite porous plate. The flow is caused by the motion of the porous plate in its own plane with an impulsive velocity V(t). The governing nonlinear problem is solved by invoking the Lie group theoretic approach and a numerical technique. Travelling wave solutions of the forward and backward type, together with a steady state solution, form the basis of our analytical analysis. Further, the closed-form solutions are also compared against numerical results. The essential features of the embedded parameters are described. In particular, the physical significance of the plate suction/injection and magnetic field is studied.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
The scientific appeal of non-Newtonian fluid mechanics has advocated a deeper study of its theory. There has been substantial interest in the steady and unsteady flows of non-Newtonian fluids over the last few decades. One reason for this interest is the wide variety of applications of such flows, both natural and industrial. These applications range from the extraction of crude oil from petroleum products to the polymer industry. Spin coating is a classic example where the coating fluids are typically non-Newtonian. The non-Newtonian fluid models exhibit a nonlinear stress-strain relation or have a non-zero yield stress. Unlike Newtonian fluids, non-Newtonian fluids, in view of their diversity in nature, cannot have a single constitutive relation. One of the widely accepted models amongst non-Newtonian fluids is the class of Rivlin-Eriksen fluids [1]. Rivlin-Eriksen fluids have secured special attention in order to describe the several non-standard features of non-Newtonian fluids such as shear thickening, shear thinning and normal stress effects.
Due to the complex physical structure of non-Newtonian fluids, these fluids are classified according to the properties which characterise them. Literature surveys witness that much focus has been given to the flow problems of a second-grade fluid [2–4]. A second-grade fluid model, despite its simplicity, has drawbacks in that although it can predict the normal stress differences, it fails to recognise the shear thinning and shear thickening properties if the shear viscosity is assumed to be a constant. This impediment is remedied by the third-grade fluid [5–8] and the fourth-grade fluid models. Very little attention has been given in literature to the studies related to the fourth-grade fluid model [9, 10]. Currently, only the fourth-grade fluid seems to define the properties of non-Newtonian flow phenomena most generally. The fourth-grade fluid model is known to capture the interesting non-Newtonian flow properties such as shear thinning and shear thickening that many other non-Newtonian models do not exhibit. This model is also capable of describing the normal stress effects that lead to phenomena like “die-swell” and “rod-climbing” [11]. With these facts in mind, we have considered a fourth-grade fluid model in this study. In general, the governing equations of the problems dealing with the flow of fourth-grade fluids are higher order, nonlinear and complicated equations. Literature survey witness that limited studies have been reported, up to now, dealing with the flow problems of a fourth-grade fluid. These studies further narrows down when we speak about closed form solutions of these problems. However, some useful and interesting investigations in this direction are provided in the studies [12–17].
Recently, the study of the motion on non-Newtonian fluids in the presence of a magnetic field has received special attention because of its wide range of applications. A few examples are flows of nuclear fuel slurries, flow of plasma, flow of mercury amalgams, flow of biological fluids, flow of plastic extrusion and the flow of lubrication with heavy oils [18]. Another very important field of application for non-Newtonian magnetohydrodynamics (MHD) flows is electromagnetic propulsion [7]. An electromagnetic propulsion consists of a power source such as a nuclear reactor, a plasma and a tube through which the plasma is accelerated by applying the magnetic force. The study of such problems which deal with the flow of non-Newtonian fluids in the presence of a magnetic field requires complete understanding of the equation of state and other fluid properties such as stress-strain relationships, electrical conductivity and radiation. Some of these properties will be influenced by the presence of an external magnetic field. With these applications in mind, in this study, an electrically conducting non-Newtonian fluid under the effects of an external uniform magnetic field is analysed.
Flows induced by the arbitrary motion of a plate has attracted the attention of many researchers with respect to Newtonian fluids and various non-Newtonian fluids [19–24], especially the flow of non-Newtonian fluids over a flat moving porous plate, which is found in various engineering applications. For example, the injection moulding of plastic parts is the common example. In our investigation, we firstly employ a no-slip condition at the moving porous plate. The no-slip boundary condition is widely used for the flow problems involving Newtonian and non-Newtonian fluids past solid boundaries and has proved to be highly useful for a great variety of flow problems. Some investigations on no-slip conditions have been performed in [25–28].
Keeping in mind the above-mentioned analysis, the present study deals with the time-dependent flow of a fourth-grade fluid induced due to impulsive motion of a flat porous plate in the presence of a uniform magnetic field. Our investigation is fairly general since the motion of the fourth-grade fluid, the influence of the applied magnetic field and the suction/injection velocity of the porous plate have been discussed together. The governing model has been solved exactly by employing the Lie symmetry approach [29, 30] and using a numerical technique. Further, the influence of the various emerging parameters of the flow model is discussed through graphical analysis of the obtained results.
2 Mathematical Modelling
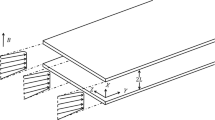
In formulating the model equations, we consider a Cartesian frame of reference O x y z. An unsteady, incompressible and electrically conducting fourth-grade fluid occupies the region y > 0. At y = 0, the fluid is bounded by an infinite porous plate. The unsteady incompressible motion of the electrically conducting non-Newtonian fluid is governed by:
where ρ is the fluid density, d/d t the material time derivative, T the Cauchy stress tensor and \(\bar {V}~=~(u,v,w)\) the velocity vector. The current density is given by \(\bar {J}\) and \(\bar {B}\) and gives the total magnetic field such that \(\bar {B}~=~\bar {B_{0}}~+~\bar {b}\), where \(\bar {B_{0}}\) is the applied magnetic field and \(\bar {B}\) is the induced magnetic field.
In the present analysis, the fluid is electrically conducting, and there is an applied magnetic field in the normal direction to the flow. In the low magnetic Reynolds number flow, the induced electric and magnetic field can be neglected and thus the magnetic force \(\bar {J}~\times ~\bar {B}\) becomes
where σ is the electrical conductivity of the fluid.
The material time derivative d/d t is defined as:
For the model under investigation, we consider a velocity field of the form
where u(y,t) is the velocity field in the x-direction and W 0 corresponds to either suction or injection. For W 0 > 0, we have suction velocity and for W 0 < 0, we have injection velocity. The suction or injection is independent of both the time and spatial derivatives.
The Cauchy stress tensor T for a fourth-grade fluid is given by [9]
where p is the pressure, I is the identity tensor and S j is the extra stress tensor. The components of S j are given as:
In the above equations, μ is the dynamic viscosity and α i (i = 1,2), β k (k = 1,2,3) and γ l (l = 1,…,8) are the material parameters. The Rivlin-Ericksen tensors, also known as kinematic tensors, are
where ∇ is the gradient operator. The continuity equation is identically satisfied using (5). Further, we substitute (5) into (1) to obtain the set of motion equations
The substitution of (4) into (7–10) yields the components of the
Making use of (16)–(21) and substituting into (13), the x-component of the governing equation is given by
Substituting (16–21) into (14), the y-component the equation of motion is given by
Inserting (16–21) into (15), the z-component of the equation of motion is
Considering \(\hat {p} = -T_{yy}\) and \(\hat {p} = -T_{zz}\), we have
Thus, the y-component and the z-component of the equation of motion can be solved to show that \(\hat {p}\) is a function independent of y and z and simply a function of x and t. For the purposes of this study, we neglect the effects of modified pressure gradient. As a result of this, the x-component the equation of motion (22) reduces to
The relevant initial and boundary conditions are:
where U 0 is the reference velocity and V(t), F(y), G(y) and H(y) are functions to be determined from further conditions. The first boundary condition (28) indicates that the plate is moving with an impulsive velocity V(t), also known as the no-slip condition. The second boundary condition (29) shows that the mainstream velocity is zero as the fluid to be considered is at rest far away from the plate. The initial condition (30) indicates that initially, the fluid is moving with some non-uniform velocity F(y). The remaining two initial conditions, (31) and (32), are the extra two conditions imposed to make the problem well posed.
We define the transformations as
Making use of (33) and substituting it into (27), the governing equation in a non-dimensional form is written as
The dimensionless boundary and initial conditions are:
where
and
The functions \(\bar {V}(\bar {t}), ~\bar {f}(\bar {y}),~\bar {g}(\bar {y})\) and \(\bar {h}(\bar {y})\) are arbitrary. For simplicity we neglect the bars from all the non-dimensional quantities in the further analysis.
Remark 1
By performing the classical Lie group analysis, [28, 29] the infinitesimals for the partial differential (34) are
where c 1 and c 2 are constants.
The corresponding Lie point symmetry generators are
where X 1 is the time-translational symmetry generator and X 2 is the space-translational symmetry generator.
3 Invariant Solutions of the Problem
In this section, we present different types of group invariant solutions of the initial boundary value problem (34)–(39) with the aid of the Lie group translation operator.
3.1 Travelling Wave Solutions
Travelling wave solutions are one of a special kind of group invariant solutions which remain invariant under a linear combination of time-translational and space-translational symmetry generators. It is already easily seen that the partial differential (34) admits the Lie symmetry generators ∂/∂ t (time translation) and ∂/∂ y (space translation in y). Therefore, we can develop travelling wave solutions for the modelled non-linear partial differential equation.
3.1.1 Backward Type
We search for the invariant solution under the operator
which represents a backward wave-front type travelling wave solution. In this case, the waves are propagating towards the plate with a constant wave speed m.
By solving the differential equations of the characteristic curves corresponding to the operator (44), we find the invariant solution of the form
With the substitution of (45) into (34) the partial differential equation is transformed into a fifth-order ordinary differential equation for P(ξ), viz.
Thus, the partial differential (34) is transformed into an ordinary differential (46) along certain curves in the y–t plane.
In order to solve the ordinary differential (46) for P(ξ), we assume a solution of the form
where A and B are constants to be determined. Substituting (47) into (46) yields
Separating (48) in powers of e 0 and e 2Bξ results in
By solving (50), we find
Making use of the value of B in (49), we deduce
Thus, the exact solution for P(ξ) provided the condition (52) holds is written as
Finally, the exact solution u(y,t) which satisfies the condition (52) is given by
Further, by making use of the boundary conditions (35)–(39), we can deduce the following
with
The initial velocity V(0) of the porous plate can be prescribed but its velocity V(t) for t > 0, cannot be arbitrary and its given by (55). Similarly, the initial profile u(y,0) cannot be arbitrary and it given by (56).
We note that by making use of the imposing condition (52), we can express the solution (54) in the form
The solution (60) is plotted in Figs. 1, 2, 3, 4, 5, 6 and 7 for varying values of the emerging parameters of the flow problem.
Further, the imposing condition (52) can also be written as
Equation (61) determines the wave speed m provided that
We note that the range of the values of the parameter β for which m is real depends on the cubic polynomial in β on the numerator of (61) and also on the sign of the denominator.
3.1.2 Forward Type
We now find the invariant solution under the operator
which represents a forward wave-front type travelling wave solution. In this case the waves are propagating away from the plate at a constant speed m. There are solutions of the form
The use of (64) into (34) results in the fifth-order ordinary differential equation for Q(η)
Following the same methodology adopted for obtaining the backward type solution, (65) admits the exact solution of the form
provided that
Thus, the exact solution u(y,t) which satisfies condition (67) is given by
The solution (68) is a shock wave solution to the governing partial differential (34). The above solution is valid under a particular condition on the physical parameters of the flow problem given in (67). This solution does show the hidden shock wave behaviour of the flow problem with the slope of the velocity field or the velocity gradient approaching infinity such that
The solution (68) does not satisfy the second boundary condition at infinity but does satisfy the rest of the boundary conditions for particular values of the functions V(t), f(y), g(y) and h(y). The use of (68) in (35)–(39) gives
where the functions V(t), f(y), g(y) and h(y) depend on the physical parameters of the flow problem.
The physical significance of the imposing condition (67) is that it gives the speed of the travelling shock wave. From (67), we deduce
with
The shock wave behaviour of solution (68) is observed in Fig. 8.
3.1.3 Steady State Solution
The time translational symmetry generator is given by
The invariant solution is obtained by solving the corresponding differential equations of characteristic curves and is given by
Substituting (77) into (34), the partial differential equation reduces to the following ordinary differential equation
The invariant boundary conditions are given by
It can also be seen that (78) admits the exact solution
provided that
The steady state solution (81) is only valid for injection (W 0 < 0). For the case of suction (W 0 > 0), the solution does not satisfy the second boundary condition at infinity and places a restriction on the physical parameters. One can also solve the reduced ordinary differential (78) subject to the boundary conditions (79)–(80) numerically. These solutions are plotted in Figs. 9 and 10 using the Mathematica® solver NDSolve.
Remark 2
Finally, we note that further reduction of the ordinary differential (46) is also possible. The ordinary differential (46) admits the Lie point generator \(k=\frac {\partial }{\partial \xi }\). The corresponding invariants of k are
Under these invariants, the fifth-order ordinary differential (46) reduces to a fourth order ordinary differential equation in n given as
The above ordinary differential (84) does not generate any Lie point symmetries. Thus, this further reduction is not helpful in this analysis as difficulties arise when transforming the solutions of the ordinary differential (84) back into original variables.
4 Results and Discussion
In order to get the physical insight of the flow model under investigation, the behaviour of various pertinent parameters on the structure of the velocity field is observed.
The effects of time t on the velocity field (60) is shown in Fig. 1. This figure shows that the velocity decreases for large values of time. The variation of velocity is observed for 0 ≤ t ≤ 4.2. For t>4.2, the velocity field remains the same. In other words, we can say that the steady state behaviour of velocity is achieved for t > 4.2.

Profile of the analytical solution (60) for varying values of time t, with β=2, Γ=1, m = 1, W 0 = 0.5, γ = 0.5, β 1 = 1, α = 0.5
The influence of the wave speed m on the velocity field (60) has been presented in Fig. 2. It is observed that the velocity increases by increasing m. In this way, we can remark that both time and wave speed have the opposite effect on the closed form solution (60) of the model.

Profile of the analytical solution (60) for varying values of the wave speed m, with β = 1, Γ = 2, M = 1, W 0 = 0.5, t = π/2, γ = 0.5, β 1 = 1, α = 1
The dependence of the distribution of the velocity field (60) on the magnetic field is shown in Fig. 3. From the figure, it is observed that the applied magnetic field tends to restrict the shearing to a thinner boundary layer near the porous plate. The reason for this thinning is that the magnetic field provides a resistance to the flow and hence decreases the velocity field. Thus, the magnetic field provides some mechanism to control the boundary layer thickness. These facts have also been observed from Fig. 3.

Profile of the analytical solution (60) for varying values of the magnetic field parameter M, with β = 1, Γ = 2, m = 1, W 0 = 0.1, t = π/2, γ = 1, β 1 = 1, α = 1
Figures 4 and 5 describe the behaviour of the velocity field (60) with suction (W 0 > 0) and injection (W 0 < 0) parameters. It is depicted from Fig. 4 that the velocity field, as well as the boundary layer thickness, decreases with an increase in the suction parameter W 0 > 0. This structure of the velocity profile is also expected physically because suction always causes a reduction in the boundary layer thickness. Figure 5 is displayed to show the effect of the injection velocity. For injection through a porous plate, the fluid behaves qualitatively opposite to suction velocity. So, from these figures, it has been observed that our closed-form solution (60) remains stable both for the case of suction and injection provided that m > W 0.

Profile of the analytical solution (60) for varying values of the suction parameter W 0 > 0, with \(\beta ~=~1,~{\Gamma }~=~2,~M~=~1,~m~=~2~ ,t~=~\pi /2,~\gamma ~=~1,~ \beta _{1}~=~1,~\protect \) α = 1

Profile of the analytical solution (60) for varying values of injection parameter W 0 < 0, with β = 1, Γ = 2, M = 1, m = 0.5, t = π/2, γ = 1, β 1 = 1, α = 1
In order to describe the influence of the third-grade fluid parameter Γ on the flow model, the velocity field (60) has been plotted in Figs. 6 and 7. These figures reveal that both β and Γ have opposite roles on the structure of the velocity, i.e., with an increase in parameter β, the velocity field is decreasing, which shows the shear thickening behaviour of the fluid. However, the velocity profile increases for increasing values of Γ showing the shear thinning property of the fluid.

Profile of the analytical solution (60) for varying values of third grade fluid parameter β, with Γ = 1, M = 0.5, m = 1, W 0 = 0.5, t = π/2, γ = 1, β 1 = 1, α = 1 are fixed

Profile of the analytical solution (60) fr varying values of fourth grade fluid parameter Γ, with β = 1, M = 0.5, m = 1 ,W 0 = 0.5, t = π/2, γ = 1 ,β 1 = 1, α = 1
In Fig. 8, the closed-form solution (68) is plotted. This figure predicts the shock wave behaviour of the flow with the slope approaching infinity along the characteristics. This solution does not show the physics of the model, but does predict the hidden shock wave phenomena in the flow. Some examples of shock waves are moving shock, detonation waves, detached shock, attached shock, decompression shock, shock in a pipe flow, shock waves in rapid granular flows, shock waves in astrophysics and so on.

Profile of the shock wave solution (68), with β = 3, Γ = 0.1, m = 1, t = π/2, W 0 = 1
Finally, the numerical solutions of the reduced ordinary differential (78) subject to the boundary conditions (80) are plotted in Figs. 9 and 10 for varying values of M and W 0. It is clearly observed from these figures that the numerical solutions show the same behaviour as we have observed from the closed-form solutions.


5 Concluding Remarks
In this study, we have focused on the modelling and solutions of a nonlinear time-dependent flow model of an electrically conducting fourth-grade fluid with plate suction and injection. Lie group theoretic analysis has been employed to perform reductions of the governing nonlinear partial differential equations to different ordinary differential equations. Both forward and backward wave-front type travelling wave solutions (of the model equation) have been developed in the form of a closed-form exponential function. The steady-state model has also been solved exactly.
The backward wave-front type travelling wave solution best represents the physics of the model under investigation in the sense that this solution satisfies all the boundary and initial conditions. It also shows the effects of the magnetic field and the plate injection/suction directly on the physical system. On the other hand, the forward wave-front type travelling wave solution does not satisfy the boundary condition at infinity. As a consequence, it does not show the physical behaviour of the flow model. But this solution, however, does describe the hidden shock wave behaviour of the flow. To emphasize, we say that this solution is going to be very useful in carrying out further analysis of the shock wave behaviour associated with non-Newtonian fluid flow problems. Moreover, the model considered herein is theoretical and prototype in nature, but the methodology used is quite useful to handle a wide range of nonlinear problems. This is not only restricted to the field of non-Newtonian fluid mechanics, but also in other fields of science and engineering.
References
R.S. Rivlin, J.L. Ericksen, Stress deformation relation for isotropic materials. J. Ration. Mech. Anal. 4, 323–329 (1955)
M. Yürüsoy, M. Pakdemirli, O.F. Noyan, Lie group analysis of creeping flow of a second grade fluid. Int. J. Non-Linear Mech. 36, 955–960 (2001)
K. Fakhar, C. Yi, J. Xiaoda, L. Xiaodong, Lie symmetry analysis and some new exact solutions for rotating flow of a second-order fluid on a porous plate. Int. J. Eng. Sci. 44, 889–896 (2006)
M.E. Erdogan, C.E. Imrak, On unsteady unidirectional flows of a second grade fluid. Int. J. Non-Linear Mech. 40, 1238–1251 (2005)
T. Aziz, F.M. Mahomed, A. Aziz, Group invariant solutions for the unsteady MHD flow of a third grade fluid in a porous medium. Int. J. Non-Linear Mech. 47, 792–798 (2012)
A. Aziz, T. Aziz, MHD flow of a third grade fluid in a porous half space with plate suction or injection: an analytical approach. Appl. Math. Comput. 218, 10443–10453 (2012)
Y. Wang, W. Wua, Time-dependent magnetohydrodynamic flow induced by non-coaxial rotations of a non-torsionally oscillating porous plate and a third-order fluid at infinity. Math. Comput. Model. 46, 1277–1293 (2007)
F.T. Akyildiza, H. Bellouta, K. Vajravelu, Exact solutions of nonlinear differential equations arising in third grade fluid flows. Int. J. Non-Linear Mech. 39, 1571–1578 (2004)
T. Aziz, F.M. Mahomed, Closed-form solutions for a nonlinear partial differential equation arising in the study of a fourth grade fluid model. J. Appl. Math. 2012, ArticleID 931587, 16p (2012)
T. Hayat, A.H. Kara, E. Momoniat, Travelling wave solutions to Stokes′ problem for a fourth grade fluid. Appl. Math. Model. 33, 1613–1619 (2009)
W.R. Schowalter. Mechanics of non-Newtonian fluids, (Pergamon, 1978)
T. Hayat, A.H. Kara, E. Momoniat, The unsteady flow of a fourth-grade fluid past a porous plate. Math. Comput. Model. 41, 1347–1353 (2005)
V. Marinca, N. Herisanu, C. Bota, B. Marinca, An optimal homotopy asymptotic method applied to the steady flow of a fourth-grade fluid past a porous plate. Appl. Math. Lett. 22, 245–251 (2009)
A.M. Siddiqui, M. Sajid, T. Hayat, Wire coating by withdrawal from a bath of fourth order fluid. Phys. Lett. A. 372, 2665–2670 (2008)
S. Nadeem, M. Ali, Analytical solutions for pipe flow of a fourth grade fluid with Reynold and Vogel’s models of viscosities. Commun. Nonlinear Sci. Numer. Simulat. 14, 2073–2090 (2009)
M.H. Haroun, Non-linear peristaltic flow of a fourth grade fluid in an inclined asymmetric channel. Comput. Materials Sci. 39, 324–333 (2007)
A.M. Abd-Alla, S.M. Abo-Dahab, H.D. El-Shahrany, Effects of rotation and initial stress on peristaltic transport of fourth grade fluid with heat transfer and induced magnetic field. J. Magnetism Magnetic Mater. 349, 268–280 (2014)
T. Sarpkaya, Flow of non-Newtonian fluids in a magnetic field. ALChEJ. 7, 324–328 (1961)
A. Chakraborti, A.S. Gupta, B.K. Das, R.N. Jana, Hydromagnetic flow past a rotating porous plate in a conducting fluid rotating about a noncoincident parallel axis. Acta Mech. 176, 107–119 (2005)
K.R. Rajagopal, On an exact solution for the flow of an Oldroyd-B fluid. Bull. Tech. Uni. Ist. 49, 617–623 (1996)
K.R. Rajagopal, T.Y. Na, On Stoke’s problem for a non-Newtonian fluid. Acta Mech. 48, 233–239 (1983)
K.R. Rajagopal, A.S. Gupta, An exact solution for the flow of non-Newtonian fluid past an infinite porous plate. Meccanica. 19, 158–160 (1984)
M.E. Erdogan, Plane surface suddenly set in motion in a non-Newtonian fluid. Acta Mech. 108, 179–187 (1995)
C. Fetecau, C. Fetecau, M. Rana, General solutions for the unsteady flow of second-grade fluids over an infinite plate that applies arbitrary shear to the fluid. Z. Naturforsch. 66a, 753–759 (2011)
S.G. Hatzikiriakos, J.M. Dealy, Wall slip of molten high density polyethylene I. Sliding plate rheometer studies. J. Rheol. 35, 497–523 (1991)
S.G. Hatzikiriakos, J.M. Dealy, Wall slip of molten high density polyethylene’s II. Capillary rheometer studies. J. Rheol. 36, 703–741 (1992)
A.-R.A. Khaled, K. Vafai, The effect of the slip condition on Stokes and Couette flows due to an oscillating wall: exact solutions. Int. J. Non-Linear Mech. 39, 795–809 (2004)
I.J. Rao, K.R. Rajagopal, The effect of the slip boundary condition on the flow of fluids in a channel. Acta Mech. 135, 113–126 (1999)
N.H. Ibragimov, Vol. 3. CRC handbook of lie group analysis of differential equations (CRC Press, Boca Raton, 1996)
P.J. Olver, Applications of Lie groups to differential equations (Springer, New York, 1986)
Acknowledgments
Taha Aziz, A.B. Magan and F.M. Mahomed would like to thank the National Research Foundation (NRF) of South Africa for their financial support.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Aziz, T., Magan, A.B. & Mahomed, F.M. Invariant Solutions for the Unsteady Magnetohydrodynamics (MHD) Flow of a Fourth-Grade Fluid Induced Due to the Impulsive Motion of a Flat Porous Plate. Braz J Phys 45, 120–131 (2015). https://doi.org/10.1007/s13538-014-0292-9
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s13538-014-0292-9