
Abstract
This paper focuses on an experimental procedure to localize multiple leaks in a nonhomogenous hydraulic pipeline system made up of three portions of two different materials. Then, an experimental setup originally designed for water hammer study was modified and adapted for leak detection using transients. Two leaks were made in some particular locations in the main pipe and a transient event through a rapid closure of a downstream valve was created. To mimic common practical issues that may be encountered, three main leakage cases were considered; a single leak, two simultaneous leaks and two successive leaks (i.e., one leak that appears followed by an abrupt appearance of a second leak after a period of time). Leaks were experimentally localized by analyzing obtained pressure signals in the excitation point. Results were validated through comparison with numerical ones obtained using the method of characteristics. Additionally, a novel formula to localize the second leak in a successive leaks scenario was presented and its accuracy was confirmed for our test case. Experimental techniques presented in this paper and performed on a test bench at lab scale can be extended and tested on large scale hydraulic pipeline systems.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Management of water supply systems includes, among others, ensuring sustainable delivery of water to end users. The latter implies being able to predict and then prevent any potential failure of pipelines. A notch occurring in pipeline may not alter immediately water delivery but it can lead to a leak causing water losses. Furthermore, once occurring, a leak is susceptible to take long period (sometimes years) before it can be noticed. Hence, defining reliable nondestructive techniques for leak detection and localization is of great importance for a sustainable supply of water. Indeed, localizing the exact position of a leak is a cumbersome task mainly in large scale water distribution systems.
The detection of leaks in hydraulic installations has been the aim of several research works that were based on different localization techniques. Methods of leaks detection are well related on how the leak is defined and how it is seen as. Plenty of definitions of leaks are found in literature; Ferrante and Brunone [1] identified the leak as an internal exciter of the hydraulic system. Covas et al. [2] as well as Colombo et al. [3] have considered the leak as a hydraulic discontinuity. Cheung and Lai [4] have defined a leak as a mechanical dislocation. On the other hand, Feng et al. [5] have seen the leak as an evident result of corrosion and aging of the transport system. Whatever its specific definition is, a leak is a hydraulic singularity that is susceptible to be encountered in a piping system. Then, it needs to be located and sized for further repairing. To this end, research works have been carried out to define a precise tool to locate and size a leak occurring in a hydraulic installation. The separation of the leak effect from other singularities effects in a hydraulic system, such as closing maneuver, stationary friction and blocking effects, has been the main interest of several previous researches [6,7,8]. Nevertheless, some problems related to locating and sizing a leak in a hydraulic system are still not well visited. In fact, most of the studied hydraulic systems for leaks detection consider a tank-pipe-valve system. The latter was firstly studied for rigid pipes then for elastic pipes. More lately, in the last few years, polyethylene and rubber pipes were considered in recent researches focusing on the viscoelastic behavior [9,10,11].
Referring to the classical water hammer theory, formulae have been developed for estimating the leak size through a valve closure maneuver at the downstream end of a piping system [12,13,14]. For preliminary leak size estimation works [2], simple correlations were used even though they do not accurately describe the response of hydraulic systems encountered in everyday life, due mainly to friction losses and the viscoelastic behavior of some pipes. More recently, Lay-Ekuakille et al. [15, 16] have worked experimentally on serpentine (zigzag) pipes and have located leaks using the impedance method based on works of Brunone and Ferrante [12]. Additionally, experimental works were carried out by Taghvaei et al. [17] aiming to improve leak detection techniques in real systems. They pointed out the effectiveness of spectral analysis in locating hydraulic discontinuities such as leakages.
Based on previous experimental as well as numerical works, formulae for locating and sizing leaks have been presented. They were built reposing either on frequency analysis of the pressure wave [18,19,20] or on time analysis of the pressure head [6, 12].
For numerical works on leak detection, partial differential equations describing fluid dynamic problems were solved using several techniques. Finite element method as well as finite volume method were extensively used to describe fluid flows behavior [21,22,23]. Nevertheless, method of characteristics is still utilized mainly when focusing on wave propagations in fluid flows. In fact, the latter method is suitable for water hammer analysis as its numerical scheme is built reposing on the water hammer wave propagation path [24].
The presented work aims to develop an experimental procedure for locating multiple leaks in a pipeline system made up of ducts of different materials. Results of the experimental work were validated using numerically obtained ones. Then, in this paper, a brief overview on the method of characteristics for transient analysis of water flows in pipes is presented. Furthermore, an experimental procedure on how to extend the use of a test bench designed for water hammer investigation to study leakage scenarios is detailed. The considered pipeline system is made up of nonhomogenous portions of pipe materials (copper and PVC), and it presents a helical shape in its main copper part. In fact, PVC is likely to damp the water hammer wave amplitude making cumbersome the determination of the leak effect on the pressure profile. Indeed, nonhomogenous pipe system was numerically studied in recent works. Bettaieb et al. [25] have studied the impact of metallic-plastic pipe configurations on transient pressure evolution in water network. Triki et al. [26] have investigated the effect of adding a branched polymeric short penstock at the transient sensitive regions of an existing steel piping hydraulic system. For most of previous studies, systems originally made up of homogenous pipe material were modified by adding a polymeric pipe branch to damp pressure in sensitive zones likely to be damaged through water hammer effect. Nevertheless, leakage phenomenon on an originally nonhomogenous pipe system was not considered and experimental investigation of such system is rarely encountered in literature.
As a matter of fact, a detailed experimental procedure was applied to the pipeline system to detect and localize multi-leaks under different scenarios using transient events created on a test bench of PVC-copper pipe materials. Pressure profiles obtained experimentally are compared to those resulted from a numerical code developed based on the method of characteristics and an acceptable agreement was observed. Also, obtained pressure curves were analyzed and discussed in order to experimentally localize leaks for the considered cases with a good accuracy. Contrary to previous related researches, the novelty of the conducted experimental work lies in the fact that it considers a piping system with complex shaped pipeline (the main copper pipe is helically mounted) connected to portions of pipes of a different material (PVC hoses). Additionally, a novel formula for locating a leak in the case of successive leaks scenario was presented.
2 Mathematical model
Considering a reservoir-pipe-valve system as shown in Fig. 1, numerical modeling of a transient flow, generated by a rapid closure of the valve, allows detecting potential leakage by analyzing time history of the pressure signal at the downstream end of the pipe. Valve closure causes a water hammer wave to propagate through the entire hydraulic system. This wave will change its characteristics when it encounters a singularity such as a leak. The leak, similarly to any other hydraulic singularity, admits its own signature on the time spectrum of the pressure registered at the downstream end of the system.

Simple reservoir-pipe-valve system with one leak
Under the assumptions of a fully developed water flow along a horizontal pipe, equations of motions governing hydraulic transient as detailed by Lazhar et al. [6] reduce to
, where p (in Pa) is the pressure, V (in m/s) is the flow velocity, ρ (in kg/m3) is the fluid density assumed to be constant for water, C (in m/s) is the wave speed, D (in m) is the internal diameter of the pipe, λ (dimensionless) is the friction coefficient and \(\mathop \varepsilon \nolimits_{\varphi }^{r}\) (dimensionless) represents the retarded strain as developed by Lazhar et al. [6].
In the case of a viscoelastic pipe system, by writing V = Q/A (where Q is the volumetric flow rate and A is the cross-sectional area of the pipe) and p = ρgH (where g stands for the gravitational acceleration and H is the pressure head), motions Eqs. (1) and (2) are rewritten
For an elastic pipe system, by considering null the retarded strain, Eqs. (3) and (4) reduce to
The latter equations are of hyperbolic type; therefore, they can be numerically solved using the method of characteristics [27, 28].
3 Numerical model: overview on the method of characteristics
The method of characteristics is a powerful tool that was extensively used to solve partial differential equations of hyperbolic type describing transient events occurring in complex hydraulic systems [29, 30]. It allows transforming the partial differential Eqs. (5) and (6) into a set of ordinary differential equations valid along characteristic lines plotted in a space–time plane [25].
Following the principle of the method of characteristics as detailed in several research works [27, 28, 31], obtained ordinary deferential equations to be numerically integrated along the characteristic lines C+ and C− are as follows:
For a constant wave celerity C, the characteristic directions follow straight lines allowing for a regular mesh grid as illustrated in Fig. 2.

Regular mesh grid
The numerical resolution of Eqs. (7) and (8) in internal nodes and in extreme nodes considering appropriate boundary conditions, for the cases of an intact pipe and a pipe with a leak, has been thoroughly detailed by Lazhar et al. [6].
For the coming sections of this work, an experimental study on leak detection using transients created in a test bench will be conducted. Registered experimental results, i.e., pressure time history at the excitation point (the downstream valve) will be compared to those numerically obtained through the method of characteristics.
4 Methodology
4.1 Experimental setup: detailed description of the water hammer test bench
Experimental tests for the localization of a leakage in a piping system by means of transients were carried out in the Energetic Laboratory at the Higher Institute of Technological Studies of Gafsa, Tunisia. The experimental setup is “HM155 Water hammer in pipes [32]”, as presented in Fig. 3. The test bench, originally designed for the investigation of water hammer and pressure waves in an intact pipe, has been adapted for leak detection and localization and that for a pipe with a single leak and then with two leaks.

Experimental setup HM155 [32]
The installation’s main components are detailed in Fig. 3. Additionally, it features GUNT software for data acquisition via USB under Windows 7, 8.1 and 10. It allows displaying the pressure and flow rate curves. The 60-m-long pipe portion is mounted as coiled copper tube to save space; the tube has an internal diameter of 10 mm. The 5 l capacity pressure vessel (surge tank) serves as a defined reflection point.
Two solenoid valves denoted MV1 and MV2 are used to generate water hammer, one with a fixed closing time of 20–30 ms and another with an adjustable closing time of 1 to 4 s. The pressure signal due to water hammer is measured by means of an electronic pressure transmitter. A manometer to visualize the system pressure is installed. The flow rate is adjusted by acting on the manual valves. The flow rate can be adjusted from 30 to 320 l/h. The solenoid valves are switched on, and the pressure transmitter is powered by the control unit. The pressure signal can be also evaluated by means of a dual-channel storage oscilloscope.
The system is supplied with water from the external laboratory network using a 3.5 m long PVC hose connected to the main copper pipe. For the water discharge, a PVC pipe with the same characteristics as the first one, but 30 m long, is installed at the downstream end of the copper pipe, then connected to a pressure vessel. The supply pressure must not exceed 16 bar.
4.2 Signal processing
Data collection is performed using an Eagle PC30S acquisition card (Fig. 4a). It is a 12-bit acquisition card with a sampling rate going up to 330 kHz. It contains 15 channels, two channels are connected to the control unit; one for the acquisition of the pressure head and the other one for the acquisition of the flow rate. For the performed experimental tests, the duration of acquisition is 10 s and the sampling frequency is taken as equal to 25 kHz. Obtained data are saved and visualized using GUNT software installed in a desktop computer (Fig. 4b).

Eagle PC30S acquisition card (a) and desktop computer for data saving (b)
For the generation of the water hammer, a control unit as shown in Fig. 5 is required; it allows controlling the solenoid valves. Details on connections of the solenoid valve MV1, the pressure sensor and the power supply to the control unit are seen in Fig. 5b.

Control unit (a) and various connections of the control unit to the piping system (b)
HM155 experimental setup features two solenoid valves (Fig. 6) that are responsible for water hammer generation:
-
Solenoid valve MV1: a two-way solenoid valve that opens at an operating voltage of 24 V DC, its nominal width is DN1 = 3 mm with a nominal flow rate of 250 l/h. It operates in a range of pressure between 0 and 22 bar. MV1 has a constant closing time (20–30 ms).
-
Solenoid valve MV2: a two-way solenoid valve that opens with an operating voltage of 24 V DC, its nominal width is DN2 = 13 mm with a nominal flow rate of 400 l/h, it operates in a range of pressure between 0.2 bar and 12 bar. MV2 allows an adjustable closing time 1–4 s that can be controlled by turning the adjusting screw of the valve with a screwdriver. The valve closing time is increased clockwise.

Solenoid valves MV1 and MV2
The pressure sensor as well as the pressure vessel are shown, respectively, in Fig. 7a, b. The pressure vessel serves as a defined end of the feeding hose. It prevents propagation of shock waves in the laboratory network.

Pressure sensor (a) and pressure vessel (b)
4.3 Adaptation of the water hammer setup for leak detection
In order to allow for experimental investigations of one or more leaks using the setup built originally for water hammer testing, two holes with diameters of 2 mm and depths equal to the pipe thickness are made on the helically shaped copper pipe. These holes represent the two leaks as shown in Fig. 8. The test bench involves a helical part of copper pipe with about 32 turns vertically disposed. Considering the short non helical parts of copper material at the beginning and at the end of the coiled tube that corresponds approximately to the length of two turns, the overall copper pipe of length L = 60 m is considered to have 34 turns. Then, one turn has a length of approximately 1.764 m. The two leaks made in the copper pipe are located, respectively, after 11.5 and 21.5 turns from the lower part of the test bench as seen in Fig. 8. Therefore, the positions of the leaks are, respectively, at distances d1 = 11.5 × 60/34 = 20.29411 m and d2 = 21.5 × 60/34 = 37.9411 m calculated from the beginning of the copper pipe at the lower part of the test bench. It is noticeable that d1 ≃ L/3 and d2 ≃ 2L/3, then they will be referred to us as L/3 and 2L/3, respectively.

Two leaks made on the setup and activated
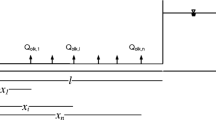
A simplified layout of the studied pipeline system is illustrated in Fig. 9. In the latter figure, the three main portions of the piping system are highlighted and the two leaks made in the main copper pipe are represented.

Simplified representation of the studied system
The main characteristics of the studied hydraulic system are reported in Table 1.
Supposing the outlet of the reservoir to be the origin of the positions calculations, the respective locations of the leaks along the length of the piping system are x1 = L1 + d1 = 23.79411 m and x2 = L1 + d2 = 41.44117 m.
The setup allows studying different leakage scenarios. For the case of a pipe with an only one leak to be studied, the first leak is activated while the second one is blocked by a screw (Fig. 10) with a perfect sealing.

Manipulation of two leaks (blocking and activating)
Blocking a leak by a screw may result in a flow blocking effect generated by the tip of the screw that represents a singularity having an inverse effect of the leak on the pressure curve. Hence, since the screw was manufactured in the mechanical shop of the institute where the experimental tests were conducted, measures were taken to adjust its dimensions accordingly in a way to make its length as close as possible to the thickness of the pipe to minimize the tip blockage effect. Also, the screw was mounted with a perfect sealing to completely block the leak. It is worth mentioning that all experimental tests were performed late at night (from 10 p.m to 2 a.m). In fact, at that period of the day, the consumption of water from the city’s water distribution system is at its minimum making the feeding flow rate of water to the test bench as stable as possible. Additionally, the initial flow rate of the water flowing through the pipe before the leak occurs is taken to be Q0 = 110 l/h. The initial value of the flow rate is chosen to be low in order to avoid cavitation in the pipe. The vapor-filled cavities formed when cavitation phenomenon takes place makes it difficult to analyze pressure signal resulted from the water hammer effect, then preventing proper locating of the leak position.
5 Results and discussion
5.1 Comparison of the experimental and the numerical results
At this first stage, experimental tests were conducted considering only one activated leak (the other one is blocked by the screw). The two positions of the leak are tested alternatively and experimental results are compared with those numerically obtained using the method of characteristics. Experimental and numerical pressure heads at the downstream end of the piping system (just upstream of the excitation valve) for the two leaks locations are shown in Fig. 11. It is to notice that, instead of using automatic closure valves, the excitation valve was manually closed as rapidly as possible and for curves of Fig. 11 the closing time phase is not illustrated, the transient is assumed to begin (t = 0) after the full closure of the valve. Experimental results illustrating the closing time phase are reported in the coming subsection.

Experimental validation of the numerical model for the two leaks locations
Pressure curves of Fig. 11 show an acceptable agreement between numerical and experimental results. Nevertheless, it is observed a temporal decay of the experimental pressure curves compared to the numerical ones. This decay can be justified by the fact that the unsteady friction is ignored in the numerical model on the one hand; on the other hand, it is to mention that in practice, the copper pipe is hardly to be completely purged due to its helical form. In addition, for the numerical model, gravitation effect was not considered as the piping system is assumed to be horizontally disposed.
5.2 Localization of a single leak
Recalling the equation used for leak localization as defined in previous literature references [6, 33], the leak position is written
, where X is the distance of the leak to the reservoir, \(\Delta t_{l}\) is the reflection time (the time of appearance of the first sudden decrease of pressure head), Ls = L1 + L + L2 is the length of the pipe system from the reservoir to the excitation point (PVC hose 1 + copper pipe + PVC hose 2), and C is the pressure wave celerity.
Table 2 reports the experimental value of the pressure wave celerity. The oscillation period T is determined as the arithmetic average of peak-to-peak times as graphically illustrated in Fig. 12 for experimental curve corresponding to the second leak (the red curve).

Localization of the leaks: experimental results
In order to judge the accuracy of the experimental procedure, the calculated value of the pressure wave celerity is utilized to evaluate the position of the two leaks using Eq. (9). Firstly, reflection time Δtl due to the presence of a leak is determined as illustrated by the enlargement zone in Fig. 12 and that for both leaks. As observed through Fig. 12, reflection times due to leaks are calculated from the instant of full closure of the valve to the instant at which the pressure profile undergoes an abrupt decay due to the presence of a leak. Table 3 summarizes reflection times as well as the experimentally calculated positions of both leaks and a comparison with their actual positions (x1 and x2). Additionally, the uncertainties defining the localization error of the method are reported.
According to the obtained results as detailed in Table 3, the conducted experimental procedure has allowed localizing the leak with an acceptable accuracy despite the complexity of the pipeline system. Added to that, comparing the uncertainty of the method to previous research works that were conducted for homogenous pipes [8], outcomes of the experimental test can be considered satisfactory. It is worth noticing that the accuracy of the localization technique is highly related to the clarity of obtained experimental pressure signals. In fact, the analysis of the experimentally obtained pressure signal to determine reflection times due to the leaks was quite cumbersome. As a matter of fact, the pressure signal is rapidly damped due to the complexity of the piping system involving PVC hoses. Then, series of tests were conducted to finally obtain a pressure signal fair enough to determine reflection time through a zoomed section. The latter task can be improved by using a more sophisticated acquisition card and increasing sampling frequencies toward more precise results.
Obtained values of leak location errors for both leaks demonstrate that the localization of the second leak (the nearest one to the excitation point) is more accurate. Indeed, the latter observation is in concordance with previous literature results [6, 12].
5.3 Scenario of two leaks: simultaneous and successive
Although being a practical technique for leak detection, transient water hammer through rapid valve closure can itself destroy the pipe and increase the likelihood of further leakage. Added to that, the study of the phenomenon remains delicate because of its dependence on all hydraulic and mechanical parameters of the pipeline system. Nevertheless, the effect of two leaks scenarios was successfully visualized experimentally. This procedure was successful after several tests with the constraint of a low flow rate to avoid the cavitation phenomenon. Firstly, the scenario of two simultaneous leaks was tested. Then, the second scenario of two successive leaks was performed. The procedure is more sensitive for the case of two successive leaks as the second leak needs to occur later enhanced by the wave propagating along the pipe. To visualize the latter effect, a screw manufactured in the mechanical workshop of the institute is used to block the second leak. The screw is mounted with a seal that can be disassembled exactly when a water hammer wave created by the closure of the valve and traveling between the endpoints of the system (the valve and the reservoir) reaches the second leak position in one of their traveling paths (as previously shown in Fig. 8).
Figure 13 shows the evolution of the pressure head at the valve for the different four cases of two leaks scenarios viz. a leak at the position close to the valve (x = L1 + 2L/3), a leak at the position close to the reservoir (x = L1 + L/3), two simultaneous leaks and two successive leaks (the one close to the reservoir is initially activated and the other one occurs later after the transient event takes place).

Downstream pressure evolution for different scenarios of two leaks
It is seen from Fig. 13 that initially the amplitude of the pressure head in the case of two successive leaks is almost equal to that in the case of a single leak close to the reservoir. This observation is justified by the fact that initially in the successive leak's scenario, only the first leak is activated. At a defined moment, this amplitude of pressure head for this scenario drops abruptly and becomes equal to that corresponding to two simultaneous leaks. The instant of this abrupt drop informs about the occurrence of a new singularity in the system, i.e., the second leak (the exact instant of disassembling of the screw) and the pressure signal will be similar to that corresponding to two simultaneous leaks scenario. Due to the dimensions of the experimental setup, only two leaks were generated. Nevertheless, it is to notice that the presented two successive leaks scenario can be generalized for more than two leaks. If known, the pressure signal of the pipe with one leak can be taken as a reference to localize other leaks that occur successively.
5.4 An alternative localization formula for successive leaks scenario
The pressure wave due to the transient event is created at the valve and it travels the distance between the valve and the reservoir (the whole system length Ls). During its traveling between these two endpoints, the wave will always reach the valve after traveling a distance equal to ke × Ls (ke is an even integer) and it will reach the reservoir after traveling a distance ko × Ls (ko is an odd integer). For two successive leaks scenario, having that the abrupt drop of the pressure head corresponding to the occurrence of the second leak takes place at t2 = 4 s (as shown in Fig. 13), at that time the wave has traveled a total distance d = C × t2. Hence, the position X2 (calculated from the reservoir) of the second leak can be determined using the following formula
Using Eq. (10) and for Ls = 93.5 m and C = 267,525 m/s as previously calculated, it is obtained C × t2/Ls = 11.4449, then as 11 is an odd integer, X2 = 0.4449 × Ls = 41.6 m. Based on the successive leaks scenario, the second leak is again localized using the proposed formula of Eq. (10) that has allowed better evaluation of the leak position and it has an uncertainty of about 0.4%, which reflects a good accuracy of the formula compared to the expression of Eq. (9) usually used for localization.
6 Conclusions
A numerical as well as an experimental analyses of a reservoir–pipe–valve system with one leak then with two leaks under different scenarios were performed using transient water hammer method. Obtained results have allowed determining the location of leaks with an acceptable accuracy compared to previous conducted works on a simple straight pipeline. The complexity of the studied system lies in the fact that it is composed of nonhomogeneous series of pipes; an elastic pipe, one viscoelastic pipe upstream and another one with the same mechanical behavior downstream. The presented experimental procedure allowed obtaining promising results. Additionally, a new formula that has proved its accuracy for the localization of a leak was presented. The developed formula is useful mainly for the case of leaks scenario when a leak appears later after the transient has begun. Although the usefulness of the presented experimental technique for the considered system, analysis of leaks in systems involving inbuilt singularities (fittings, elbows, shrinkage, expansion, etc.) is still required in future works. In addition, to confirm its usefulness, extending the experimental procedure for analyzing large scale piping systems with more sophisticated experimental facilities will be of great interest for hydraulic engineers.
References
Ferrante, M.; Brunone, B.: Pipe system diagnosis and leak detection by unsteady-state tests. 1. Harmonic analysis. Adv. Water Resour. 26, 95–105 (2003). https://doi.org/10.1016/s0309-1708(02)00101-x
Covas, D.; Ramos, H.; Graham, N.; Maksimovic, C.: Application of hydraulic transients for leak detection in water supply systems. Water Supply 4(5), 365–374 (2004). https://doi.org/10.2166/ws.2004.0127
Colombo, A.F.; Lee, P.; Karney, B.W.: A selective literature review of transient-based leak detection methods. J. Hydro-Environ. Res. 2, 212–227 (2009). https://doi.org/10.1016/j.jher.2009.02.003
Cheung, B.W.Y.; Lai, W.W.L.: Field validation of water-pipe leakage detection through spatial and time-lapse analysis of GPR wave velocity. Near Surf. Geophys. 17(3), 197–310 (2019). https://doi.org/10.1002/nsg.12041
Feng, Q.; Yan, B.; Chen, P.; Shirazi, S.A.: Failure analysis and simulation model of pinhole corrosion of the refined oil pipeline. Eng. Fail. Anal. 106, 104177 (2019). https://doi.org/10.1016/j.engfailanal.2019.104177
Lazhar, A.; Hadj-Taieb, L.; Hadj-Taieb, E.: Two leaks detection in viscoelastic pipeline systems by means of transient. J. Loss Prevent. Proc. 26(6), 1341–1351 (2013). https://doi.org/10.1016/j.jlp.2013.08.007
Brunone, B.; Meniconi, S.; Capponi, C.: Numerical analysis of the transient pressure damping in a single polymeric pipe with a leak. Urban Water J. 15, 760–768 (2019). https://doi.org/10.1080/1573062X.2018.1547772
Zhang, Q.; Wu, F.; Yang, Z.; Li, G.; Zuo, J.: Simulation of the transient characteristics of water pipeline leakage with different bending angles. Water 11(9), 1871–1885 (2019). https://doi.org/10.3390/w11091871
Martini, A.; Troncossi, M.; Rivola, A.: Leak Detection in water-filled small-diameter polyethylene pipes by means of acoustic emission measurements. Appl. Sci. 7(1), 2 (2017). https://doi.org/10.3390/app7010002
Meniconi, S.; Brunone, B.; Ferrante, M.; Massari, C.: Numerical and experimental investigation of leaks in viscoelastic pressurized pipe flow. Drink. Water Eng. Sci. 6, 11–16 (2013). https://doi.org/10.5194/dwes-6-11-2013
Wang, X.; Ghidaoui, M.S.; Lin, J.: Identification of multiple leaks in pipeline III: experimental results. Mech. Syst. Signal Pr. 130, 395–408 (2019). https://doi.org/10.1016/j.ymssp.2019.05.015
Brunone, B.; Ferrante, M.: Detecting leaks in pressurized pipes by means of transients. J. Hydraul. Res. 39(5), 539–547 (2001). https://doi.org/10.1080/00221686.2001.9628278
Brunone, B.: Transient test based technique for leak detection in outfall pipes. J. Water Res. Plan. Man. 125(5), 302–306 (1999). https://doi.org/10.1061/(ASCE)0733-9496(1999)125:5(302)
Covas, D.; Ramos, H.: Practical methods for leakage control, detection and location in pressurised systems. In: 13th International Conference on Pipeline Protection (1999)
Lay-Ekuakille, A.; Vendramin, G.; Trotta, A.: Spectral analysis of leak detection in a zigzag pipeline: a filter diagonalization method-based algorithm application. Measurement 42, 358–367 (2009). https://doi.org/10.1016/j.measurement.2008.07.007
Lay-Ekuakille, A.; Vergallo, P.; Trotta, A.: Impedance method for leak detection in zigzag pipelines. Meas. Sci. Rev. 10, 209–213 (2010). https://doi.org/10.2478/v10048-010-0036-0
Taghvaei, M.; Beck, S.B.M.; Staszewski, W.J.: Leak detection in pipeline networks using low-profile piezoceramic transducers. Struct. Control Health Monit. 14, 1063–1082 (2007). https://doi.org/10.1002/stc.187
Covas, D.; Ramos, H.; de Almeida, A.B.: Standing wave difference method for leak detection in pipeline systems. J. Hydraul. Eng. 131, 1106–1116 (2005). https://doi.org/10.1061/(ASCE)0733-9429(2005)131:12(1106)
Lee, P.J.; Lambert, M.F.; Simpson, A.R.; Vítkovský, J.P.; Liggett, J.: Experimental verification of the frequency response method for pipeline leak detection. J. Hydraul. Res. 44, 693–707 (2006). https://doi.org/10.1080/00221686.2006.9521718
Ayed, L.; Hadj Taïeb, L.; Hadj Taïeb, E.: Impedance method for modeling and locating leak with cylindrical geometry. In: Fakhfakh, T.; Bartelmus, W.; Chaari, F.; Zimroz, R.; Haddar, M. (Eds.) Condition monitoring of machinery in non-stationary operations. Springer, Berlin, Heidelberg (2012). https://doi.org/10.1007/978-3-642-28768-8_12
Das, R.: A simulated annealing-based inverse computational fluid dynamics model for unknown parameter estimation in fluid flow problem. Int. J. Comput. Fluid Dyn. 26(9–10), 499–513 (2012). https://doi.org/10.1080/10618562.2011.632375
Cao, H.; Mohareb, M.; Nistor, I.: Finite element for the dynamic analysis of pipes subjected to water hammer. J. Fluids Struct. 93, 31–47 (2020). https://doi.org/10.1016/j.jfluidstructs.2019
Guo, Q.; Zhou, J.; Li, Y.; Guan, X.; Liu, D.; Zhang, J.: Fluid-structure interaction response of a water conveyance system with a surge chamber during water hammer. Water (2020). https://doi.org/10.3390/w12041025
Hafsi, Z.; Ayed, L.; Elaoud, S.: Characteristic mesh grid method for Transient analysis of natural gas flow in Pipelines networks. UPB Sci. Bull., Ser. D: Mech. Eng. 82(2), 119–130 (2020)
Bettaieb, N.; Guidara, M.A.; Haj Taieb, E.: Impact of metallic-plastic pipe configurations on transient pressure response in branched WDN. Int J Pres Ves Pip. 188, 104204 (2020). https://doi.org/10.1016/j.ijpvp.2020.104204
Triki, A.: Water-hammer control in pressurized-pipe flow using a branched polymeric penstock. J. Pipeline Syst. Eng. Pract. 8(4), 04017024 (2017). https://doi.org/10.1061/(ASCE)PS.1949-1204.0000277
Elaoud, S.; Hadj-Taïeb, E.: Transient flow in pipelines of high-pressure hydrogen–natural gas mixtures. Int. J. Hydrogen Energ. 33, 4824–4832 (2008). https://doi.org/10.1016/j.ijhydene.2008.06.032
Twyman, J.: Transient flow analysis using the method of characteristics MOC with five-point interpolation scheme. Obras y Proyectos. 24, 62–70 (2018). https://doi.org/10.4067/s0718-28132018000200062
Chaudhry, M.H. Applied Hydraulic Transients, 3rd edn., Springer, New York, Heidelberg, Dordrecht, London (2014). https://doi.org/10.1007/978-1-4614-8538-4
Twyman, J.: Wave speed calculation for water hammer analysis. Obras Proyectos. 20, 86–92 (2016). https://doi.org/10.4067/S0718-28132016000200007
Vardy, A.E.; Tijsseling, A.S.: Method of characteristics for transient, spherical flows. Appl. Math. Model. 77, 810–828 (2020). https://doi.org/10.1016/j.apm.2019.07.037
Gunt HAMBURG, HM 155 Water hammer in pipes. https://www.gunt.de/en/products/fluid-mechanics/transient-flow/water-hammer/water-hammer-in-pipes/070.15500/hm155/glct-1:pa-148:ca-782:pr-590. Accessed 15 Dec 2020
Elaoud, S.; Hadj-Taïeb, L.; Hadj-Taïeb, E.: Leak detection of hydrogen-natural gas mixtures in pipes using the characteristics method of specified time intervals. J. Loss Prevent. Proc. 23, 637–645 (2010). https://doi.org/10.1016/j.jlp.2010.06.015
Acknowledgment
The support of the staff of the Energetic Laboratory at the Higher Institute of Technological Studies of Gafsa (Tunisia), that allowed conducting experimental tests, is highly acknowledged.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Ayed, L., Hafsi, Z. Experimental and Numerical Investigations of Multi-leaks Detection in a Nonhomogenous Pipeline System. Arab J Sci Eng 46, 7729–7739 (2021). https://doi.org/10.1007/s13369-021-05491-0
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s13369-021-05491-0