
Abstract
Understanding the distribution of individuals in space is a primary concern to ecologists and managers. With the advent of remote monitoring technology, we have been able to answer where individuals are but we often lack an understanding of why they are located in a particular place from a behavioral perspective. Increasingly, ecologists are becoming aware of the crucial role individual behavior may play in ecological processes. The movement of individuals within fragmented landscapes is no exception. We used a dynamic state variable model to explicitly account for the behavioral trade-off between acquiring forage and predation risk in a spatial context. We found that when individuals were able to become behaviorally unavailable for predation within a patch as a result of their energetic state, foraging strategy, or the effectiveness of anti-predator behaviors, they were able to mitigate the potential travel costs associated with the spatial configuration of patches to use riskier patches. However, when this was not possible, patch choice became an effective way of minimizing the risk of predation. Individuals appear to trade-off predation risk and the acquisition of forage in a hierarchical fashion depending on whether or not the spatial arrangement and context of patches constrained their anti-predator behavior. We suggest that a better understanding how patch selection and the behavioral trade-offs associated with predation risk occur at multiple scales may help bridge the gap between animal behavior and landscape ecology.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
A fundamental interest in ecology is the abundance and distribution of individuals on the landscape. Landscapes provide the backdrop for the ecological processes that lead to a distribution of animals (Southwood 1988). Natural landscapes are rapidly becoming fragmented by human activities. To better conserve and manage species inhabiting altered landscapes, an understanding of how patch configuration affects animal distributions is required (Wilcox and Murphy 1985; Saunders et al. 1991; Huxel and Hastings 1999; Palomares 2001). At the same time, ecologists have become aware of the important role that scale and individual behavior plays in the distribution of populations (Belisle 2005; Zollner and Lima 2005; Railsback and Harvey 2013; Basille et al. 2015; Berger-Tal and Bar-David 2015; Bonnot et al. 2015; Eggeman et al. 2016). With an increasing ability to remotely monitor individuals in landscapes with technologies such as global positioning collars, spatial data at the level of the individual animal is now plentiful. However, whereas we have become very good at saying where animals are, we have often fallen short of explicitly answering why they are where they are. Static species-habitat relationships (e.g., Boyce and McDonald 1999) and utilization distributions (Worton 1989; Marzluff et al. 2004) are often used to infer the reasons for the distributions we observe (Hebblewhite et al. 2005; Wolf et al. 2009; Godvik et al. 2009). However, if we want to truly address the underlying motivations of why animals make particular choices, an approach that explicitly incorporates behavioral decision making is required (Lima and Zollner 1996; Roitberg and Mangel 1997; Zollner and Lima 2005).
A major determinant in the allocation of time by large herbivores within and among patches is determined by foraging opportunities and requirements to avoid predation (Frair et al. 2007; Creel et al. 2005; Courbin et al. 2014). Where forage and predation risk are positively related, herbivores will need to make behavioral choices that reflect trade-offs in net energy acquisition and predator avoidance at several scales (Brown 1999; Rettie and Messier 2000; Dussault et al. 2005; Searle et al. 2008; Hebblewhite and Merrill 2009; Martin et al. 2015). Rettie and Messier (2000) argue that avoidance of predation occurs primarily at a large spatial scale and, therefore, necessarily constrains foraging opportunities. These discussions of landscape level space use may often ignore the behaviors that individuals can use to mitigate predation once in a patch such as inactivity or vigilance that may occur within a patch (Anholt and Werner 1995; Caro 2005; Fortin et al. 2004; Creel and Winnie 2005; Dussault et al. 2005; Winnie and Creel 2007; Searle et al. 2008; Robinson and Merrill 2013; Schmidt and Kuijper 2015). Indeed, Schmidt and Kuijper (2015) discuss the potential for “death traps” within landscape when landscape conditions are not heterogeneous and the role that behavior may play in determining an individual’s response to predation risk at the fine scale within a patch relative to between patches. The ability to optimize fitness by moving among patches may be constrained by energetic costs or predation risk (Johnson et al. 2002; Belisle 2005; Zollner and Lima 2005; Frair et al. 2008; Resetarits and Binckley 2009). The cost incurred in moving between patches depends not only on the magnitude of the risk but also on the duration of risk exposure. In most cases, individuals that move quickly between patches will minimize predation exposure, but at the same time they will incur higher energy costs (Parker et al. 1984; McAdam and Kramer 1998; Johnson et al. 2001; Zollner and Lima 2005). The real cost of these behaviors depends not only on the immediate consequences to an individual’s state but also on the strategies used to meet overall fitness goals (Kohler and McPeek 1989; Zollner and Lima 2005; Winnie and Creel 2007; Hay et al. 2008; Wojdak 2009). As a consequence, individuals in patchy landscapes have an array of options for trading-off risks and rewards, both within and between patches, contingent on their cumulative well-being or fitness.
To address how individuals hierarchically trade-off acquiring energy and avoiding predation within and between patches, we constructed a dynamic state variable model following the general approach of Houston and McNamara (1999) and Clark and Mangel (2000) that incorporated a set of behaviors available to a large ruminant herbivore when deciding to use patches in the landscape. In developing the model, we focused on (1) how variation in energy availability and predation risk associated with patch use and moving among patches were traded-off to meet fitness goals specified by two different fitness functions, (2) how individuals altered patch use contingent on trade-offs between energy acquisition and risk avoidance within and between patches, and (3) how energetic state (state-dependence) of an animal mediated trade-offs in foraging and risk avoidance. We addressed these questions by comparing the relative amount and evenness in animal use among five patches under varied patch configurations, different contrast in the cost that influenced costs of moving between patches and within patch predation risk and energy intake rates, and efficiency of anti-predator behavior within patch. We hypothesized that when patch configuration imposed cost constraints on traveling to the most profitable patches, patch use was most evenly distributed among patches but only when within patch anti-predator behaviors were effective. As a first assessment of these landscape trade-offs, we did not directly address the effect of conspecifics even though animal aggregation in a patch may alter per capita resource gain and risk of predator due to higher vigilance or the dilution effect (Krause and Ruxton 2002; Shrader et al. 2007; Thaker et al. 2010; Murthy et al. 2016). Instead, we indirectly assessed these by altering levels of energy intake and predation risk within a patch. Second, we assumed forage depletion was insufficient to alter the probability of finding food in a patch and therefore it remained constant. Although bite mass can decline due to depletion, increasing bite rate may initially compensate for it (Illius et al. 2002; Illius and Fryxell 2002; Searle et al. 2005). Thus, our immediate goal was to assess specific trade-offs in foraging and predation avoidance in the context of two set strategies for achieving fitness goals rather than understand the dynamics that lead to evolving strategies.
Methods
We developed a dynamic state model representing a ruminant herbivore moving in a heterogenous environment, within a home range consisting of five patches. The herbivore made decisions that reflected trade-offs in foraging opportunities and predation risk that positively co-varied among patches. At each time step, the behavior influenced the gut-fill and energetic state, which reflected fitness.
Behavioral model
The simulated individual had three distinct state-related traits (g,gut fill, e,energy reserves, and i,location) that were updated based on the consequences of the decisions it made. At every time step, the individual had the option of three behaviors (b). First, the individual could ruminate (b=1), converting its gut contents into energy reserves. Second, the individual could refrain from either of these two activities and rest (b=2). Resting in essence delays the need to return to foraging, and the potential predation risk associated with foraging (see below for further details) that is brought on by gut emptying through rumination. Third, it could actively forage (b=3), increasing its gut fill but at an energetic (metabolic) cost associated with foraging (m). Metabolic costs (m) were assumed to be behavior specific and did not differ among patches. Intake resulted in gut contents increasing based on intake rate (β i ) with a probability of λ (and increasing by 0 with probability 1- λ). This represented the probability of finding food, which because there was no depletion, was assumed to be constant and set to 0.95 for all simulations. Both rumination and resting had an associated metabolic cost of activity that was half the cost of active foraging. The simulated individual was able to pursue any of these three behaviors in one of the five patches in the home range, which were indexed as i=1,2,3,4,5. Each patch presented unique combination of intake rate and predation risk (p i , Table 1). Rumination (α i ) rates were constant for all patches. In all cases, i indexes the patches and i=1,2,3,4,5. Patches were assigned intake values and predation rates such that the patch with the highest intake rate also had the highest predation risk and the reverse was true for the safest patch (Table 1). As a result, we compared patch use along a gradient in patch conditions from the most safe and least profitable to the least safe and most profitable. This caused the individual to make patch selection decisions that involved trading-off forage and predation risk (Lima and Dill 1990). To move among patches, the simulated individual incurred an energetic cost (c) of movement and an in-transit risk of predation (u), both of which increased with inter-patch distance (d i j ; energetic cost = 1 x d and predation risk = d/1000). Where i indexes the current location and j the subsequent patch, thus when i = j the inter-patch distance was 0 (the individual remained in its current location). To explore the effect of within-patch trade-offs between foraging and predation avoidance on patch use, we assigned resting and ruminating (i.e., inactivity) three values of predation avoidance that reflected the completeness of the behavior as a predation refuge: complete predation refuge, incomplete refuge, and ineffective where predation risk was similar to foraging (Table 1). As a result, predation risk to an animal inhabiting a patch at any point in time was a function of both the inherent risk of being in the patch and the behavior of the animal (Banks et al. 2000; Zollner and Lima 2005).
Stochastic dynamic programming was used to solve for the optimal decisions (both behavior in the patch and patch selection) through time, based on state as:
where
where V i,b refers to the fitness accrued in the ith patch (i=1,2,3...n) by selecting the bth behavior (1; ruminating, 2; resting or 3; foraging) and p i is the probability of predation (and therefore survival is 1−p i ) occurring in patch i. Additionally, we allowed the individual to incur an instantaneous risk of predation (u) when making the decision to travel between patches, which increased with inter-patch distance d i,j . Likewise, energy reserves were decreased by a cost (c) accrued when traveling over the inter-patch distance upon reaching the new patch. While transit between patches occurred instantaneously, the costs and risks associated with it were incorporated into the individual’s decision to make use of a new patch by discounting its potential gains and adding to its patch-specific costs.
Thus, the fitness function at any time is calculated as:
where the terminal fitness function Φ(e,T) of an individual indicates the strategy of the forager, prioritizing safety or the acquisition of energy. As such, it was expected to affect patch use and behavior in a state-dependent fashion. We simulated all scenarios with both a linear and sigmoid fitness function. The linear fitness function prioritized the acquisition of energy until the fitness of gaining additional forage multiplied by the risk of predation was less than the fitness of resting behavior, given as:
or defined as a sigmoid fitness function as:
where rep is a reproductive threshold that must be met by the energy reserves to gain a fitness benefit (Cook et al. 2001). The strategy of an individual modeled with a sigmoid fitness was determined by the fitness of the animals on the the sigmoidal curve, based on its state. While located in the convex portion of the sigmoid curve, where it was far from reaching its fitness threshold, the individual prioritized forage acquisition, much like a linear fitness function. However, in the concave portion of the curve, individuals are expected to prioritize safety (Stephens and Krebs 1986). Over the long term, individuals modeled with the sigmoid fitness function minimized their exposure to predation more then animals using a constant maximization strategy. In all cases when t = T, fitness was dependent only on energy reserves and not gut fill. We assumed that any remaining forage in the gut at the end of the time horizon, i.e., at time = T, did not convey a fitness benefit. A full list of parameters and variables, their description, and values are given in Table 1. The scenarios for the form of the fitness function and the extent of the behavioral refuge are given in Table 2.
Patch configuration and contrast
We represented landscape configuration with five patches within the home range to keep the model computationally reasonable (Fig. 1). Landscapes were created to represent a range of aggregations (or meta-patches) while holding landscape inter-patch distances approximately equal (within 10 % of the same average distance among patches). The first landscape contained five patches arranged in two local aggregations, consisting of two and three patches, where the inter-aggregate distance was greater than the average inter-patch distance within each local aggregate (aggregated; Fig. 1a). The second landscape consisted of an aggregation of four patches and a single isolated patch (isolated; Fig. 1b). The third landscape contained five patches with equal inter-patch distances (even; Fig. 1c). Lastly, as a baseline, a five-patch landscape was created where the inter-patch distances were 0 (no cost; Fig. 1d). We varied patch contrast by altering the variation in quality (intake rate and predation risk) of a patch relative to its neighbors found in the same local aggregation (e.g., whether or not the safest or most productive patches are found next to one another in the same local aggregation). The contrast effect was simulated by systematically varying the order of the patches in the home range while maintaining configuration. The landscape scenarios for spatial configuration and spatial contrast are given in Table 2.

Representative landscapes containing five patches within a simulated individual’s home range. Patches were located to represent a gradient of configuration from a aggregated, b isolated, c even (uniform), and d zero inter-patch distance (where movement between patches comes at no cost or risk)
Simulations
The Monte Carlo forward iteration method (Clark and Mangel 2000) was used to simulate the decisions of 100 replicated individuals at all combinations of gut fill (0–100) and energy reserves (0–100) such that the use of patches types (p1–p5) were based on 1,000,000 realizations. The individuals of the same gut fill and energy state were replicated 100 times to account for the stochastic risk of predation in the simulation. An individual was initialized in a randomly assigned patch and subsequently followed the optimal policy; no other individuals were present during the simulation (i.e., we did not model the influence of conspecifics on behavioral decision making). An individual’s behavioral decisions, state, and survival was recorded at every time step. Due to computational limitations, simulations were limited to 100 time steps for individuals using a linear fitness function and 200 time steps for individuals using a sigmoid function. An ANOVA was calculated to assess the relative influence of categorical factors for patch configuration, patch contrast, completeness of the behavioral refuge, and the form of the fitness function on the evenness of patch use (using η 2 = S S factor/S S total). The evenness in patch use for each individual was calculated as the standard deviation in use among patches, were first arcsine square root transformed to increase normality as they were necessarily bound between 0 and 0.45 (where a low value indicates even patch use and a value approaching 0.45 indicates that a single patch was used preferentially).
Results
Activity within patches
Behavior within the patches was dependent on the patch-specific rates not the spatial arrangements of patches per se. When the rumination rate was greater than intake rate, individuals required more foraging time per bout to ensure sufficient forage in the gut for subsequent processing. Conversely, when intake rate exceeded rumination rate, individuals were able to acquire forage rapidly in short bouts, gaining enough gut contents that required multiple time steps to ruminate. The effect of the ratio of intake to rumination rate on bout length and dynamics was the same for both fitness functions; however, individuals modeled with a sigmoid fitness function spend more time inactive relative to those modeled with a linear fitness function. The effect of patch-specific predation risk on fitness was to devalue the potential energetic gains of foraging by the expectation of survival. As foraging became increasingly risky, the fitness benefits of remaining inactive outweighed the benefit of foraging at the cost of potential death. Furthermore, the metabolic cost changed the bout dynamics not patch choice as it was constant across all patches (i.e., it was behavior specific not patch specific) and therefore did not effect the relative value of a patch. Examples of the patterns of within-patch behaviors and their effect on energetic state are given in the Supplementary Information (Figs. 6 and 7).
Magnitude and evenness of patch use
Across all conditions, patch use was most influenced by the completeness of the within-patch behavioral refuge and the nature of this response depended on the shape of the fitness function (Table 3 and Fig. 2).

The influence of the effectiveness of anti-predator activity on the evenness in patch use (variation in patch use (sd)) within the home range for the landscape where patches were evenly spaced. The effectiveness of anti-predator behavior formed a complete refuge, incomplete refuge (predation risk = foraging - 0.002), and ineffective refuge (predation risk = foraging) during inactivity. This same pattern was evident in all scenarios. The white boxes refer to the distribution of individuals simulated with a sigmoid fitness function while the gray boxes represent the distribution of individuals simulated with a linear fitness function
Linear fitness function
Under a linear fitness function, if individuals could completely mitigate predation risk by being inactive in a patch (Fig. 3: gray boxes), patch use was relatively uneven because individuals concentrated their use in the most profitable patches (highest energy intake rate) despite the high predation risk associated with these patches. The most profitable patch, regardless of configuration and where it was located within a configuration, provided the fastest way to increase energy reserves, and therefore fitness. When there were no costs to moving among patches (Fig. 3d; gray boxes), individuals used the safest patch the most, foraged exclusively in the most profitable patch and then spent their non-foraging time (i.e., resting and rumination) in the safest patch. In contrast, when individuals were not efficient at modifying within patch predation risk, patch use was more variable and evenly distributed across patches except when costs among patches were either non-existent or similar among patches (Fig. 4). In these cases, use was highest in the most profitable patches.

Proportional patch use and the evenness in patch use (variation in patch use (sd)) when the behavioral refuge is complete (predation risk while inactive = 0) and the patches are configured to form a an isolated landscape, b an aggregated landscape, c an even landscape, and d a no cost landscape. The white boxes refer to the distribution of individuals simulated with a sigmoid fitness function while the gray boxes represent the distribution of individuals simulated with a linear fitness function. These are a summary of all contrast scenarios, where pX (X=1, 2, 3, 4, 5) refers to the patch on the landscape

Proportional patch use and the evenness in patch use (variation in patch use (sd)) when the behavioral refuge is completely ineffective (predation risk while inactive = foraging) and the patches are configured to form a an isolated landscape, b an aggregated landscape, c an even landscape, and d a no cost landscape. The white boxes refer to the distribution of individuals simulated with a sigmoid fitness function while the gray boxes represent the distribution of individuals simulated with a linear fitness function. These are a summary of all contrast scenarios, where pX (X=1, 2, 3, 4, 5) refers to the patch on the landscape
Sigmoid fitness function
When the fitness function was defined with a sigmoid function and individuals were able to use inactivity to avoid predation while in the patch (Fig. 3: white boxes), patch use was more even and less variable across patches. In general, individuals remained in their initial, randomly assigned patch to avoid the cost of inter-patch movements, instead they used inactivity to minimize exposure to predation risk. When individuals incurred no cost for moving among patches, under the sigmoid fitness function, they could compensate for foraging costs even in the patch with the lowest level of intake that we simulated. Therefore, they spent almost all their time in the safest patch (i.e., p1; Fig. 3d). When individuals could no longer modify predation risk through inactive behaviors, they increased use the safest patch. As a result, patch use was most uneven and always concentrated in the safest patch (Fig. 4; white boxes).
Patch contrast
Patch configuration influenced patch use dependent on patch contrast and differed among fitness functions (Fig. 5). For example, the effect of the arrangement of safe and productive patches within the home range was most obvious when the safest patch (for individuals modeled with a sigmoid function) and highest intake patch (for individuals modeled with a linear fitness function) were located within the local aggregation with the fewest number of patches or a single isolated patch. In this case, some individuals were not able to afford the transit costs to the distant patch or patches; instead, they used the next best patch found in the same local aggregation. As a result, there was typically more even use of patches within the home range as individuals were required to “make do” with the next best patch located in their current local aggregation (Fig. 5). When the most desirable patch was located in the largest local patch aggregation within the home range, the variation in patch use increased as a reduced travel cost within the aggregation made this patch more accessible, thereby concentrating use. The influence of the spatial context of patches was a direct result of the inter-aggregation distance exceeding the inter-patch distance within the local aggregation and the resulting accessibility of the most desirable patch.

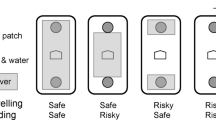
Example of the effect of patch contrast on patch use (right panels) and the evenness in patch use (variation in patch use (sd); lower left panel) in an isolated landscape. Two different context scenarios are given where the shading of the representative “map” of the patches (upper left panel) indicates the degree of risk on the left side of the patch (darker = safer) and rate of intake on the right hand side of the patch (darker = higher intake). The white boxes refer to the distribution of individuals simulated with a sigmoid fitness function while the gray boxes represent the distribution of individuals simulated with a linear fitness function. pX (X=1, 2, 3, 4, 5) refers to the patch on the landscape indicated by the number next to the patch on the “map”
Discussion
Large-scale movements and patch use by ungulates have been attributed to the hierarchical decision making of processes that scale up from foraging bites to landscape distribution (Senft et al. 1987; Bailey et al. 1996). Nonetheless, studies investigating decision rules for patch residence time typically have focused on the forage resources at one spatial scale (Jiang and Hudson 1993; Laca et al. 1994; Schaefer and Messier 1995; Searle et al. 2005). However, evidence now exists that individual responses at fine spatial scales interact with the heterogeneity of foraging at larger spatial scales (Searle et al. 2006). Similar patterns may emerge for animals making trade-offs for foraging in risky habitats. Rettie and Messier (2000) hypothesized that because predation occurred across large spatial scales, it would be avoided on the largest scales, and lower scales would be dominated by the acquisition of forage or other limiting factors. Dussault et al. (2005) found evidence supporting this view: moose tended to avoid predation by avoiding low snowfall areas, whereas their selection of patches within the home range were consistent with increased foraging opportunities. Hebblewhite and Merrill (2009) found that in partially migratory elk herd, trade-offs could occur at the large scale via migratory behavior, while resident elk accessed a spatial refuge at the small scale to reduce the risk of predation.
When predation risk is spatially structured, herbivores have several behavioral options for avoiding predation while meeting foraging requirements: using patches of low predator risk, using patches of high risk but employing anti-predator behaviors that reduce predation risk (Brown 1999; analogous to pre- and post-encounter behaviors in Mitchell 2009). Our results show that ruminant herbivores can trade-off these behaviors in the context of patch use and that optimal trade-offs in patch use are contingent on patch configuration and animal state. When anti-predator behaviors within patches were effective (i.e., behavioral refuge), an individual was able to “afford” the foraging costs of the patch-specific predation risk through inactivity and benefiting from the reduced risk of predation afforded by anti-predator activity during inactivity, except when they were constrained by their low energetic state or fitness maximizing strategy specified by the fitness function. In contrast, when ruminants were unable to employ effective anti-predator behaviors or employed an energy maximizing foraging strategy, patch selection became a vital component of optimal behavior.
The motivation of the individual either to avoid predation or acquire forage was defined by the fitness function and the shape of the fitness function was held constant for the entire simulation. However, in nature, individuals may have shifting strategies for meeting fitness goals that influence the behavioral trade-offs they make. Evidence from seasonal changes in habitat selection suggest that individuals may differentially prioritize safety and the acquisition of energy at various times of the year (Main 2008; Long et al. 2009). Likewise, differing fitness goals based on sex and reproductive status may also indirectly affect the ability of individuals to trade-off predation risk and foraging opportunities either with anti-predator behaviors within a patch or with patch selection. For example, Dussault et al. (2005) noted that there was variation in patch selection between individual caribou, which they attributed to the sex and reproductive status of the individual, which represented their motivations for the trade-off between predation risk and foraging opportunities. Similarly, Gustine et al. (2006) noted that the ability of individual caribou to respond to predation risk was condition-dependent: females in poor condition took higher risks in order to access forage, as they could not afford to avoid predation. These results highlight the importance of sampling trade-offs in foraging and predation risk multiple scales and the need to integrate between scales through the inclusion of behavioral motivation, which may facilitate trade-offs between predation risk and foraging opportunities (Johnson et al. 2004; Bowyer and Kie 2006; van Beest et al. 2013; Garvem and Morgan 2015).
The spatial configuration of patches within the home range provides the template on which movement occurs and patch choices are made, potentially constraining the movement of individuals through movement costs or the risk of predation during transit (Visscher and Merrill, in revision). While many models of ecological processes have focused on the effect of spatial configuration (Andreassen et al. 1998; McIntyre and Wiens 1999), individual behavior may potentially mitigate the effects that spatial pattern have on fitness (Roitberg and Mangel 1997; Reed and Levine 2005; Fraterrigo et al. 2009). If behavior can alter the trade-offs, apparent “death traps” in homogenous landscapes may not be as problematic as they may appear (Schmidt and Kuijper 2015). We found that individual state-dependent behavior minimized the difference in evenness in patch use and was dependent on fitness specification, despite configuration differences. Individuals prioritizing safety used the safest patch regardless of where it was located, whereas individuals prioritizing forage acquisition often used the next most productive patch when the patch offering the highest intake was isolated. In addition to spatial configuration, the contrast of patch attributes within a “landscape of fear” may also influence their use where proximity to high forage or high risk area may increase or decrease the motivation for an individual to use a particular patch (Laundre et al. 2001; Haynes et al. 2007; Searle et al. 2008). We found that when both productive and safe patches were found within the same local aggregation, the overall use of the local aggregation tended to increase subject to its isolation. The composition and contrast of patches within a meta-patch has been noted to influence patch use by invertebrates (Haynes et al. 2007; Resetarits and Binckley 2009), birds (Shriver et al. 2004), and ungulates (Weckerly 2005; O’Brien et al. 2006; Hins et al. 2009). Even if behavioral refuges such as inactivity and anti-predator behavior are employed, the spatial adjacency of refuge habitat has been shown to increase the use of otherwise risky patches (e.g., ibex in Hochman and Kotler 2007). The results from our model support the findings of these studies and highlight the need for managers to consider spatial context when planning future management actions in already fragmented landscapes. By ensuring refuge habitat or hiding cover in close proximity to foraging patches, managers may be able to facilitate the anti-predator behaviors used by herbivores to minimize predation within patches.
While our model was a first assessment of the influence of state-dependence on patch choice and within-patch behaviors, we did not directly address two potentially important considerations in our model, namely the influence of patch depletion and conspecifics. Patch depletion with increasing residency times has been assumed to reduce the motivation of a forager to remain in the patch, necessitating movement between patches (i.e., the marginal value theorem, MVT; Charnov 1976, Nonacs 2001). The inclusion of patch depletion should not be discounted and may result in a reduction in the variation in patch use among individuals as the patches become depleted until they reflect the energetic equivalence of risk associated with each patch, thereby reflecting the “landscape of fear” (Brown 1999; Laundre et al. 2001; Nonacs 2001; Brown and Kotler 2004; Harvey and Fortin 2013). However, measurement of patch residency times from the field often do not match model predictions (Stephens and Krebs 1986; Searle et al. 2005). This discrepancy has been attributed to the role of information and foraging experience on decision making (i.e., Bayesian foraging, Dall et al. 2005; Berger-Tal et al. 2014), or the restrictive assumptions of the MVT for large herbivores in natural environments (i.e., decelerating gain functions, Searle et al. 2005). We observed individuals leaving patches due to changing prioritization of forage acquisition or the avoidance of predation that arose from changes in the individual’s state-dependent motivation in the absence of depletion despite being constrained by movement costs. Similar shifts in patch use may occur due to state-dependent changes in motivation, such as having achieved a fitness goal or resulting from dietary or digestive constraints, or from the risk of predation alone (McNamara and Houston 1990; Mitchell and Lima 2002; Searle et al. 2005; van Gils and Piersma 2004; van Gils et al. 2006; Mitchell 2009). Within the context of predation risk, the influence of conspecifics on foraging results in costs and benefits for an individual (Caro 2005; Creel and Winnie 2005; Murthy et al. 2016). In our model, the relative patch utility was determined by the combination of foraging opportunities and the risk of predation; the inclusion of conspecific effects may erode some benefits of an individuals foraging while enhancing some of the anti-predator effects. Indeed, the inclusion of conspecific effects effectively re-weights the utility of a patch in a dynamic setting. The inclusion of these game-theoretic responses to state-dependent models is computationally intensive and often abstracted to the dynamics of a dyad (Rands et al. 2003, 2008; Noonburg et al. 2007). We made the assumption that patches within our simulated landscapes represented a trade-off gradient from safe relatively unproductive patches to risky and productive patches; this gradient may also represent situations where other factors, such as conspecifics, might influence overall patch utility. While simplified, our model presents a first assessment of how individual foragers might respond to a landscape containing multiple patches in a state-dependent fashion. The addition of patch depletion and conspecific influences into patch-based state-dependent models remains a fruitful area for future research (Kie 1999).
The application of a multi-scale approach to trade-offs between foraging and predation risk is likely to increase our understanding of the distribution of individuals in heterogeneous landscapes (Rettie and Messier 2000; Bowyer and Kie 2006; Searle et al. 2008; Bastille-Rousseau et al. 2015; Eliassen et al. 2015). The inclusion of state-based behavior into models of patch use can provide a framework for determining the relative importance of patch selection and within-patch anti-predator behaviors, such as vigilance, grouping, or inactivity to mediate the effect of a landscape of fear and mitigate “death traps” (Schmidt and Kuijper 2015; Gravem and Morgan 2015). The simulations presented here are a first step in explicitly incorporating behavioral decision making into models of foraging at multiple scales in fragmented landscapes. Dynamic state variable models provide a rich theoretical context for understanding patch selection and behavior at two scales for free-ranging individuals, thus helping to bridge the gap between animal behavior and landscape ecology (Lima and Zollner 1996; Belisle 2005; van Gils 2010; Sainmont et al. 2015).
References
Andreassen H, Hertzberg K, Ims R (1998) Space-use responses to habitat fragmentation and connectivity in the root vole Microtus oeconomus. Ecology 79(4):1223–1235
Anholt B, Werner E (1995) Interaction between food availability and predation mortality mediated by adaptive behaviour. Ecology 76(7):2230–2234
Bailey D, Gross J, Laca E, Rittenhouse L, Coughenour M, Swift D, Sims P (1996) Mechanisms that result in large herbivore grazing distribution patterns. J Range Manag 49(5):386–400
Banks P, Norrdahl K, Korpimaki E (2000) Nonlinearity in the predation risk of prey mobility. Proc Royal Soc London Ser B-Biol Sci 267(1453):1621–1625
Basille M, Fortin D, Dussault C, Bastille-Rousseau G, Ouellet JP, Courtois R (2015) Plastic response of fearful prey to the spatiotemporal dynamics of predator distribution. Ecology 96(10):2622–2631
Bastille-Rousseau G, Potts JR, Schaefer JA, Lewis MA, Ellington EH, Rayl ND, Mahoney SP, Murray DL (2015) Unveiling trade-offs in resource selection of migratory caribou using a mechanistic movement model of availability. Ecography 38(10):1049–1059
Belisle M (2005) Measuring landscape connectivity: the challenge of behavioral landscape ecology. Ecology 86 (8):1988–1995
Berger-Tal O, Bar-David S (2015) Recursive movement patterns: review and synthesis across species. Ecosphere 6(9):1–12
Berger-Tal O, Embar K, Kotler BP, Saltz D (2014) Past experiences and future expectations generate context-dependent costs of foraging. Behav Ecol Sociobiol 68(11):1769–1776
Berger-Tal O, Blumstein DT, Carroll S, Fisher RN, Mesnick SL, Owen MA, Saltz D, St Clair CC, Swaisgood RR (2015) A systematic survey of the integration of behavior into wildlife conservation and management. Conserv Biol
Bonnot N, Verheyden H, Blanchard P, Cote J, Debeffe L, Cargnelutti B, Klein F, Hewison AM, Morellet N (2015) Interindividual variability in habitat use: evidence for a risk management syndrome in roe deer? Behav Ecol 26(1):105–114
Bowyer R, Kie J (2006) Effects of scale on interpreting life-history characteristics of ungulates and carnivores. Divers Distrib 12(3):244–257
Boyce M, McDonald L (1999) Relating populations to habitats using resource selection functions. Trends Ecol Evol 14(7):268–272
Brown J (1999) Vigilance, patch use and habitat selection: foraging under predation risk. Evol Ecol Res 1 (1):49–71
Brown J, Kotler B (2004) Hazardous duty pay and the foraging cost of predation. Ecol Lett 7(10):999–1014
Caro T (2005) Antipredator defenses in birds and mammals. University of Chicago Press, Chicago
Charnov E (1976) Optimal foraging—marginal value theorem. Theor Popul Biol 9(2):129–136
Clark C, Mangel M (2000) Dynamic state variable model in ecology. Oxford University Press, Oxford
Cook R, Cook J, Murray D, Zager P, Johnson B, Gratson M (2001) Development of predictive models of nutritional condition for Rocky Mountain elk. J Wildlife Manag 65(4):973–987
Courbin N, Fortin D, Dussault C, Courtois R (2014) Logging-induced changes in habitat network connectivity shape behavioral interactions in the wolf–caribou–moose system. Ecol Monograph 84(2):265–285
Creel S, Winnie J (2005) Responses of elk herd size to fine-scale spatial and temporal variation in the risk of predation by wolves. Animal Behav 69:1181–1189
Creel S, Winnie J, Maxwell B, Hamlin K, Creel M (2005) Elk alter habitat selection as an antipredator response to wolves. Ecology 86(12):3387–3397
Dall SR, Giraldeau LA, Olsson O, McNamara JM, Stephens DW (2005) Information and its use by animals in evolutionary ecology. Trends Ecol Evol 20(4):187–193
Dussault C, Ouellet J, Courtois R, Huot J, Breton L, Jolicoeur H (2005) Linking moose habitat selection to limiting factors. Ecography 28(5):619–628
Eggeman SL, Hebblewhite M, Bohm H, Whittington J, Merrill EH (2016) Behavioral flexibility in migratory behavior in a long-lived large herbivore. J Anim Ecol 85(3):785–797
Eliassen S, Andersen BS, Jørgensen C, Giske J (2015) From sensing to emergent adaptations: modelling the proximate architecture for decision-making. Ecol Model 326(7):90–100
Fortin D, Boyce M, Merrill E, Fryxell J (2004) Foraging costs of vigilance in large mammalian herbivores. Oikos 107(1):172– 180
Frair JL, Merrill EH, Allen JR, Boyce MS (2007) Know thy enemy: experience affects elk translocation success in risky landscapes. J Wildlife Manag 71(2):541–554
Frair JL, Merrill EH, Beyer HL, Morales JM (2008) Thresholds in landscape connectivity and mortality risks in response to growing road networks. J Appl Ecol 45(5):1504–1513
Fraterrigo JM, Pearson SM, Turner MG (2009) Joint effects of habitat configuration and temporal stochasticity on population dynamics. Landscape Ecol 24(7):863–877
Godvik IM R, Loe LE, Vik JO, Veiberg V, Langvatn R, Mysterud A (2009) Temporal scales, trade-offs, and functional responses in red deer habitat selection. Ecology 90(3):699–710
Gravem SA, Morgan SG (2015) Prey state alters trait-mediated indirect interactions in rocky tidepools. Funct Ecol. doi:10.1111/1365-2435.12628
Grignolio S, Rossi I, Bassano B, Apollonio M (2007) Predation risk as a factor affecting sexual segregation in alpine ibex. J Mammal 88(6):1488–1497
Gustine DD, Parker KL, Lay RJ, Gillingham MP, Heard DC (2006) Interpreting resource selection at different scales for woodland caribou in winter. J Wildlife Manag 70(6):1601–1614
Harvey L, Fortin D (2013) Spatial heterogeneity in the strength of plant-herbivore interactions under predation risk: the tale of bison foraging in wolf country. PloS One 8(9):e73324
Hay CT, Cross PC, Funston PJ (2008) Trade-offs of predation and foraging explain sexual segregation in African buffalo. J Animal Ecol 77(5):850–858
Haynes KJ, Diekoetter T, Crist TO (2007) Resource complementation and the response of an insect herbivore to habitat area and fragmentation. Oecologia 153(3):511–520
Hebblewhite M, Merrill EH (2009) Trade-offs between predation risk and forage differ between migrant strategies in a migratory ungulate. Ecology 90(12):3445–3454
Hebblewhite M, Merrill E, McDonald T (2005) Spatial decomposition of predation risk using resource selection functions: an example in a wolf-elk predator-prey system. Oikos 111(1):101–111
Hins C, Ouellet JP, Dussault C, St-Laurent MH (2009) Habitat selection by forest-dwelling caribou in managed boreal forest of eastern Canada: evidence of a landscape configuration effect. Forest Ecol Manag 257 (2):636–643
Hochman V, Kotler BP (2007) Patch use, apprehension, and vigilance behavior of Nubian ibex under perceived risk of predation. Behav Ecol 18(2):368–374
Houston A, McNamara J (1999) Models of adaptive behaviour. Cambridge University Press, Cambridge
Huxel G, Hastings A (1999) Habitat loss, fragmentation, and restoration. Restor Ecol 7(3):309–315
Illius A, Fryxell J (2002) Methodological problems with estimating patch depression during resource depletion. Oikos 98(3):558–559
Illius AW, Duncan P, Richard C, Mesochina P (2002) Mechanisms of functional response and resource exploitation in browsing roe deer. J Anim Ecol 71(5):723–734
Jiang Z, Hudson R (1993) Optimal grazing of wapiti (Cervus-Elaphus) on grassland—patch and feeding station departure rules. Evol Ecol 7(5):488–498
Johnson C, Parker K, Heard D (2001) Foraging across a variable landscape: behavioral decisions made by woodland caribou at multiple spatial scales. Oecologia 127(4):590–602
Johnson C, Parker K, Heard D, Gillingham M (2002) A multiscale behavioral approach to understanding the movements of woodland caribou. Ecol Appl 12(6):1840–1860
Johnson C, Boyce M, Mulders R, Gunn A, Gau R, Cluff H, Case R (2004) Quantifying patch distribution at multiple spatial scales: applications to wildlife-habitat models. Landscape Ecol 19(8):869–882
Kie J (1999) Optimal foraging and risk of predation: effects on behavior and social structure in ungulates. J Mammal 80(4):1114–1129
Kohler S, McPeek M (1989) Predation risk and the foraging behavior of competing stream insects. Ecology 70(6):1811–1825
Krause J, Ruxton GD (2002) Living in groups. Oxford University Press
Laca E, Distel R, Griggs T, Demment M (1994) Effect of canopy structure on patch depression by grazers. Ecology 75(3):706–716
Laundre J, Hernandez L, Altendorf K (2001) Wolves, elk, and bison: reestablishing the “landscape of fear” in Yellowstone National Park, USA. Can J Zool 79(8):1401–1409
Lima S, Dill L (1990) Behavioral decisions made under the risk of predation—a review and prospectus. Can J Zool 68(4):619–640
Lima S, Zollner P (1996) Towards a behavioral ecology of ecological landscapes. Trends Ecol Evol 11 (3):131–135
Long RA, Rachlow JL, Kie JG (2009) Sex-specific responses of North American elk to habitat manipulation. J Mammal 90(2):423–432
Main MB (2008) Reconciling competing ecological explanations for sexual segregation in ungulates. Ecology 89(3):693–704
Marchand P, Garel M, Bourgoin G, Dubray D, Maillard D, Loison A (2015) Coupling scale-specific habitat selection and activity reveals sex-specific food/cover trade-offs in a large herbivore. Anim Behav 102:169–187
Martin J, Benhamou S, Yoganand K, Owen-Smith N (2015) Coping with spatial heterogeneity and temporal variability in resources and risks: adaptive movement behaviour by a large grazing herbivore. PloS One 10 (2):e0118461
Marzluff J, Millspaugh J, Hurvitz P, Handcock M (2004) Relating resources to a probabilistic measure of space use: forest fragments and Steller’s jays. Ecology 85(5):1411–1427
McAdam A, Kramer D (1998) Vigilance as a benefit of intermittent locomotion in small mammals. Anim Behav 55:109–117
McIntyre N, Wiens J (1999) Interactions between landscape structure and animal behavior: the roles of heterogeneously distributed resources and food deprivation on movement patterns. Landscape Ecol 14(5):437–447
McNamara J, Houston A (1990) State-dependent ideal free distributions. Evol Ecol 4(4):298–311
Mitchell WA (2009) Multi-behavioral strategies in a predator-prey game: an evolutionary algorithm analysis. Oikos 118(7):1073–1083
Mitchell W, Lima S (2002) Predator-prey shell games: large-scale movement and its implications for decision-making by prey. Oikos 99(2):249–259
Murthy A, Sharma M, Amith-Kumar U, Isvaran K (2016) Groups constrain the use of risky habitat by individuals: a new cost to sociality? Anim Behav 113:167–175
Nonacs P (2001) State dependent behavior and the marginal value theorem. Behav Ecol 12(1):71–83
Noonburg EG, Newman LA, Lewis M, Crabtree RL, Potapov AB (2007) Sequential decision-making in a variable environment: modeling elk movement in Yellowstone National Park as a dynamic game. Theor Popul Biol 71(2):182–195
O’Brien D, Manseau M, Fall A, Fortin M (2006) Testing the importance of spatial configuration of winter habitat for woodland caribou: an application of graph theory. Biol Conserv 130(1):70–83
Palomares F (2001) Vegetation structure and prey abundance requirements of the Iberian lynx: implications for the design of reserves and corridors. J Appl Ecol 38(1):9–18
Parker K, Robbins C, Hanley T (1984) Energy expenditures for locomotion by mule deer and elk. J Wildlife Manag 48(2):474–488
Railsback SF, Harvey BC (2013) Trait-mediated trophic interactions: is foraging theory keeping up? Trends Ecol Evol 28(2):119–125
Rands S, Cowlishaw G, Pettifor R, Rowcliffe J, Johnstone R (2003) Spontaneous emergence of leaders and followers in foraging pairs. Nature 423(6938):432–434
Rands SA, Cowlishaw G, Pettifor RA, Rowcliffe JM, Johnstone RA (2008) The emergence of leaders and followers in foraging pairs when the qualities of individuals differ. BMC Evol Biol 8:1–17
Reed J, Levine S (2005) A model for behavioral regulation of metapopulation dynamics. Ecol Model 183 (4):411–423
Resetarits W, Binckley CA (2009) Spatial contagion of predation risk affects colonization dynamics in experimental aquatic landscapes. Ecology 90(4):869–876
Rettie W, Messier F (2000) Hierarchical habitat selection by woodland caribou: its relationship to limiting factors. Ecography 23(4):466–478
Robinson BG, Merrill EH (2013) Foraging–vigilance trade-offs in a partially migratory population: comparing migrants and residents on a sympatric range. Anim Behav 85(4):849–856
Roitberg B, Mangel M (1997) Individuals on the landscape: behavior can mitigate landscape differences among habitats. Oikos 80(2):234–240
Ruckstuhl K (1998) Foraging behaviour and sexual segregation in bighorn sheep. Anim Behav 56:99–106
Sainmont J, Andersen KH, Thygesen UH, Fiksen Ø, Visser AW (2015) An effective algorithm for approximating adaptive behavior in seasonal environments. Ecol Model 311:20–30
Saunders D, Hobbs R, Margules C (1991) Biological consequences of ecosystem fragmentation - a review. Conserv Biol 5(1):18–32
Schaefer J, Messier F (1995) Winter foraging by muskoxen—a hierarchical approach to patch residence time and cratering behavior. Oecologia 104(1):39–44
Schmidt K, Kuijper DP (2015) A “death trap” in the landscape of fear. Mammal Res 60(4):275–284
Searle K, Hobbs N, Shipley L (2005) Should I stay or should I go? Patch departure decisions by herbivores at multiple scales. Oikos 111(3):417–424
Searle KR, Vandervelde T, Hobbs NT, Shipley LA (2005) Gain functions for large herbivores: tests of alternative models. J Anim Ecol 74(1):181–189
Searle K, Vandervelde T, Hobbs N, Shipley L, Wunder B (2006) Spatial context influences patch residence time in foraging hierarchies. Oecologia 148(4):710–719
Searle KR, Stokes CJ, Gordon IJ (2008) When foraging and fear meet: using foraging hierarchies to inform assessments of landscapes of fear. Behav Ecol 19(3):475–482
Senft R, Coughenour M, Bailey D, Rittenhouse L, Sala O, Swift D (1987) Large herbivore foraging and ecological hierarchies. Bioscience 37(11):789–799
Shrader AM, Kerley GI, Kotler BP, Brown JS (2007) Social information, social feeding, and competition in group-living goats (Capra hircus). Behav Ecol 18(1):103–107
Shriver W, Hodgman T, Gibbs J, Vickery P (2004) Landscape context influences salt marsh bird diversity and area requirements in New England. Biol Conserv 119(4):545–553
Southwood T (1988) Tactics, strategies and templets. Oikos 52(1):3–18
Stephens D, Krebs J (1986) Foraging theory. Princeton University Press, Princeton
Thaker M, Vanak AT, Owen CR, Ogden MB, Slotow R (2010) Group dynamics of zebra and wildebeest in a woodland savanna: effects of predation risk and habitat density. PloS One 5(9):e12758
van Beest F, Vander Wal E, Stronen A, Paquet P, Brook R (2013) Temporal variation in site fidelity: scale-dependent effects of forage abundance and predation risk in a non-migratory large herbivore. Oecologia 173 (2):409–420
van Gils JA (2010) State-dependent bayesian foraging on spatially autocorrelated food distributions. Oikos 119(2):237–244
van Gils JA, Piersma T (2004) Digestively constrained predators evade the cost of interference competition. J Anim Ecol 73(2):386–398
van Gils J, Spaans B, Dekinga A, Piersma T (2006) Foraging in a tidally structured environment by red knots (Calidris canutus): ideal, but not free. Ecology 87(5):1189–1202
Weckerly F (2005) Grass and supplemental patch selection by a population of roosevelt elk. J Mammal 86 (3):630–638
Wilcox B, Murphy D (1985) Conservation strategy—the effects of fragmentation on extinction. Amer Natur 125(6):879– 887
Winnie J, Creel S (2007) Sex-specific behavioural responses of elk to spatial and temporal variation in the threat of wolf predation. Anim Behav 73:215–225
Wojdak JM (2009) Foraging and refuge use by a pond snail: effects of physiological state, predators, and resources. Acta Oecologica 35(5):746–751
Wolf M, Frair J, Merrill E, Turchin P (2009) The attraction of the known: the importance of spatial familiarity in habitat selection in wapiti Cervus elaphus. Ecography 32(3):401–410
Worton B (1989) Kernel methods for estimating the utilization distribution in home-range studies. Ecology 70(1):164–168
Zollner P, Lima S (2005) Behavioral tradeoffs when dispersing across a patchy landscape. Oikos 108 (2):219–230
Acknowledgments
Thanks to Tomás de Camino-Beck and Erik Noonburg for helpful discussions on dynamic state variable models and stochastic dynamic programming. Thanks also to the Merrill lab, Ron Ydenberg, Mark Lewis, Colleen Cassidy St. Clair, Robert Hudson, Krzysztof Schmidt, Burt Kotler, and an anonymous reviewer for their comments on drafts of this manuscript. Funding to DRV was provided by the Department of Biological Sciences at the University of Alberta and an Industrial NSERC in collaboration with Weyerhaeuser. Funding to EHM was provided by an NSF grant (No. 0078130), Rocky Mountain Elk Foundation, Sunpine Forest Products Ltd., Weyerhaeuser, and the Alberta Conservation Association. Special thanks to the King’s Centre for Visualization in Science for access to computers for these simulations.
Author information
Authors and Affiliations
Corresponding author
Additional information
Communicated by: Krzysztof Schmidt
Electronic supplementary material
Below is the link to the electronic supplementary material.
Rights and permissions
About this article

Cite this article
Visscher, D.R., Merrill, E.H. & Martin, P.K. Hierarchical trade-offs between risk and reward mediated by behavior. Mamm Res 62, 129–140 (2017). https://doi.org/10.1007/s13364-016-0290-0
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s13364-016-0290-0