
Abstract
A method is developed to estimate pavement macrotexture depth (MTD), using measurements from a microphone mounted underneath a moving vehicle. The acoustic energy is assumed to have positive linear correlation with MTD of the pavement. However, the acoustic measurements will include tire-generated sound that carries information about the road features as well as noise generated by the environment and vehicle. The variations in frequency of the noise are assumed to be small compared to the variations in frequency of the signal related to road features, which allows principal component analysis (PCA) to filter noise from microphone data prior to estimating its energy over an optimally selected bandwidth. The acoustic energy computed from the first principal component (PC) is termed as PCA energy, which is an important variable for MTD prediction. The frequency band most relative to pavement macrotexture was determined to be 140–700 Hz. Then, an MTD prediction model was built based on a Taylor series expansion with two variables, PCA energy and driving speed. The model parameters were obtained from an engineered track (interstate highway) with known MTD and then applied to urban roads for the feasibility test. The predicted MTD extends its range from 0.4–1.5 mm of the engineered track to 0.2–3 mm, which is the typical range of MTD. In addition, the excellent repeatability of the MTD prediction is demonstrated by the urban road test. Moreover, the potential to use the predicted MTD for pavement condition assessment is discussed. Therefore, the PCA Energy Method is a reliable, efficient, and cost-effective approach to predict equivalent MTD for engineering applications as an important index for pavement condition assessment.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Pavement texture is “the deviation of a pavement surface from a true planar surface” within a specific wavelength range [1]. Macrotexture of pavement is one type of pavement texture in the same order of size as coarse aggregate or tire tread elements, with spatial wavelengths from 0.5 to 50 mm [1]. Referring to the physical meaning of macrotexture, macrotexture depth (MTD) is related to tire/road friction in wet weather [1], and the severity of segregation, which will lead to raveling, a type of pavement distress [2]. Hence, the main applications of surface macrotexture in engineering are to: (1) measure the frictional properties of the pavement surface (skid resistance) [3]; (2) evaluate construction segregation or non-uniformity [4]. The first application is directly related to crash rate especially on rainy days, and the second application is related to pavement condition rating. Therefore, an accurate, easy, safe, and cost-effective approach to test and monitor the pavement MTD is needed.
Current methods for macrotexture measurement could be classified by manual measurements and automatic measurements. Manual measurements include the sand patch method [5], the outflow meter, and the circular texture meter [4]; automatic measurement includes the vehicle-mounted laser profilometer [6]. Manual measurement can only be taken when traffic is closed, while the automatic measurement has cost issues that might hinder its widespread use. Based on the limitation of the mentioned methods, the authors developed approaches to estimate macrotexture based on the acoustic measurement of tire/road noise. In the discussion that follows, the term “tire/road noise” refers to all the sound measured by the microphone underneath the vehicle, including the “tire-generated sound” by tire–road interaction and the “noise” caused by wind and vehicle vibration. Previous research on tire/road noise indicates that dynamic interactions between the tire and the road surface produce sounds whose frequency dependence is related to the road macrotexture while the vehicle is moving [7, 8]; therefore, the idea to utilize tire/road noise for macrotexture measurement has potential. Acoustic measurement is collected from one microphone mounted behind the driver side rear tire, directed at the tire/road interface.
Two approaches are developed currently. The first approach, referred to here as the Energy Method, uses an integration of the frequency spectra of the collected acoustic measurement over a certain frequency band (40–400 Hz) to linearly correlate with the macrotexture mean texture depth (MTD) [9]. However, the Energy Method includes noise from wind and vehicle vibration that is unrelated to MTD. To increase the accuracy of the Energy Method, we developed the second approach referred to here as the PCA method. A broader frequency band (DC to 2 kHz) is selected and a principal component analysis (PCA) is applied for noise and speed effect reduction [10, 11]. The MTD is estimated by matching the principal component vector set derived from the tested pavement with one of the vector sets of known road conditions at an average accuracy of 90 % [10, 11]. However, the Energy Method may produce some negative MTD values in regular driving test because of speed effect, which reduces the accuracy and applicability of the method. Also, the PCA method requires a database of the first principal component vectors with known pavement MTD values to match with the test pavement, which will limit the prediction to the MTD values in the database. The accuracy of MTD prediction depends on the diversity of pavement types with different MTDs in the database. In reality, it is difficult to build a database containing as much as possible types of pavement surface within a broad MTD range. The current database in use by the authors is from an engineered track with 44 pavements of different MTD values, which already presents drawbacks caused by the limited database when testing on regular urban roads.
Hence, an improved approach for MTD estimation is needed to get rid of the noise not related to road texture and the limitation by the diversity of known road database. Before the improved approach is proposed, two assumptions are made based on the previous study about the relation between tire/road noise and pavement macrotexture. First, the pavement macrotexture is related to vehicle driving speed and the tire/road noise level [8]; secondly, the acoustic energy (integration of frequency spectrum of tire/road noise) below 1 kHz is positively proportional to the MTD of pavement [8, 9, 12]. Hence, based on the advantage of those two developed methods described above, one approach to combine both methods is explored and this is the PCA Energy Method.
2 Data collection
Figure 1 shows the sensor arrangement on the test vehicle for data collection. The microphone is mounted behind the driver side rear tire and directed to the tire/road interface to collect the tire/road noise, which will be utilized in this paper. The data acquisition system is located inside the test vehicle. The directional microphone was produced by GRAS, with the sensitivity of 44 mV/Pa. The same tire was used throughout the experiment to exclude the possibility of a tire effect.

Sensor arrangement of test vehicle
Two experiments were carried out in this study. The first experiment was conducted in September 2010 on an engineered track at the National Center for Asphalt Technology (NCAT) in Lee County, Alabama [11]. The track is 2.7 km long, consisting of 46 sections of pavement, each 61 m in length. The vehicle collected over 50 GB of acoustic data as it drove around the track for different testing configurations. The sampling frequency of this test is 40 kHz. Among the 46 pavement types, 44 are considered. The vehicle drove at three different speeds over the track, 32 kph (20 mph), 56 kph (35 mph), and 80 kph (50 mph), three rounds for each speed. For each round, there are 44 measurements corresponding to the 44 pavement sections. The collected data would be analyzed to explore the potential for MTD prediction and to build the prediction model.
The second test was conducted with the same vehicle (Fig. 1) in August 2012. The vehicle was driven over 20 two-lane two-way streets in the northeast section of Brockton, MA. Three loops of the route were driven in the clockwise direction and three loops were drive in the counterclockwise direction (to include the opposite lane). The sampling frequency of this test is 50 kHz. Brockton, MA, was selected because the city of Brockton and CDM smith (a consulting, engineering, construction and operation firm headquarters in Cambridge, MA) agreed to share an existing pavement condition survey from 2006. For this survey, performed by CDM smith, a pavement condition index (PCI) value was assigned to each street ranging from 0 to 100, where 0 is the worst possible condition and 100 is the best. The PCI values are the forward projected values to 2012 using Micro PAVER’s [13] built-in deterioration model. This survey information provides a valuable tool for validating algorithms for pavement MTD prediction using the test vehicle (Fig. 1), because a high MTD value of pavement predicted from the tire/road noise will result in a low PCI value indicating poor pavement condition [14]. Therefore, the collected data would then be used to test the feasibility of the MTD prediction model developed from the data collected in NCAT.
3 Method description
The general idea of this study is to combine the Energy Method and the PCA method together to include the advantages of both methods in one method. A central question addressed in the present study is the choice of model used to predict MTD, and in particular the choice of measured variables to include. Based on the first assumption given in the introduction section, pavement macrotexture is related to the tire/road noise level and the driving speed of the vehicle. Hence, both tire/road noise level and driving speed need to be included in this model.
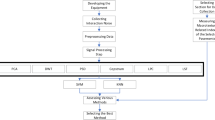
The tire/road noise level is represented by the acoustic energy which has linear relationship to MTD [9]. To obtain better estimates of energy with the purpose of getting a more linear relationship with MTD, a PCA is incorporated. PCA is a well-known statistical approach for feature extraction from measurements [15]. Pearson [16] and Hotelling [17] firstly described this technique [18]. The fundamental purpose of PCA is to reduce the dimensionality of a data set containing a quantity of variables correlated to each other, so as to keep the maximum possible variation. PCA was applied to the tire/road noise by the authors in a previous study. The inputs are the original data matrix composed of the fast Fourier transform (FFT) results of a certain length of the acoustic data (around 0.2 s), in which the rows of matrix are different time windows and the columns are different frequencies. In addition, from the view of PCA, the time windows are treated as the variables and the different frequencies are viewed as different observations in this study. Zhang et al. [11] assumed that the variations in frequency of the noise are small compared to the variations in frequency of the tire-generated sound related to the road features, which allows the PCA approach to separate noise from tire-generated sound that carries information about the road condition, including macrotexture. Moreover, because of the normalization of original data, in which the mean value of each row is subtracted off and then divided by the standard deviation of the row vector, the speed effect on the amplitude of sound pressure level (SPL) is largely reduced [10, 11]. Since the first principal component (PC) vector carries pavement macrotexture information with a high signal-to-noise ratio (SNR) [11], the present study uses the first PC vector for energy computation instead of the original data. The energy computed from that first PC vector is named PCA energy. Hence, PCA energy will be one variable for consideration representing tire/road noise level in the MTD prediction model. A flowchart is listed in Fig. 2 to show the procedure for PCA energy computation. It is noticed that the data points for each window are set to be 213 with the consideration of data length requirement for PCA treatment.

Flowchart for PCA energy computation
Detailed information of data normalization and PCA treatment may be found in the paper by Zhang et al. [11]. PCA energy is computed from the integration of the first PC vector over an optimally selected frequency band. One issue that needs to be pointed out is the unit conversion during the procedure. The data used is sound pressure with the unit of pascal; after FFT, the pascal is converted to the SPL decibel. Accordingly, data normalization would make the first PC vector have negative and positive values at decibel. To obtain positive energy as an integration of the first PC vector, the decibel of the first PC vector is converted back to pascal to make all the scales of the vector positive.
Therefore, two variables will be included in this model: PCA energy (e) and driving speed (v). With these two variables, an MTD prediction model based on a Taylor series expansion will be developed. The model parameter will be determined using NCAT test data. The next section will discuss model creation and model parameter calculations.
4 Modeling for MTD prediction
It is clearly explained in method description that two variables will be considered for MTD prediction: PCA energy (e) and driving speed of vehicle (v). Also, the frequency range used for computing PCA energy has been figured out. The next question is how to build a mathematical model to obtain the MTD of the pavement. The concept of a Taylor series expansion [19] motivates the idea of using a two-dimensional (2D) Taylor series to build the model for MTD prediction. Any function, as long as analytic at a certain point, could be expressed as Taylor expansion [19]. The accuracy of the function will be improved with the order of the variables. The general Taylor expansion [20] for 2D function f (x, y) at (x 0, y 0) is listed in Eq. (1):
where n is the the order number to be considered and k the integer varying from 0 to n,
Considering the case for MTD prediction, the input variables x and y in Eq. (1) are PCA energy (e) and driving speed (v), respectively, and the output f (x, y) is the predicted MTD. Given that the order above 3 will be neglected in this model, Eq. (1) could be converted to Eq. (2), which is more readable:
where e n is the normalized PCA energy (no dimension), see Eq. (3), v n is the normalized driving speed (no dimension), see Eq. (4), c i is the derivative of the corresponding terms of Taylor expansion (constant), \(e_{{{\text{n}}_{0} }}\), is the center of Taylor expansion of f (en, vn), f (e n , v n) is the predicted MTD (mm), and \({\rm O}\left[ {\left( {e_{\text{n}} - e_{{{\text{n}}_{0} }} } \right)^{4} + \;\left( {v_{\text{n}} - v_{{{\text{n}}_{0} }} } \right)^{4} } \right]\) are the terms to be neglected.
The normalized PCA energy (e n) and normalized driving speed (v n) are calculated in Eqs. (3) and (4) separately:
where e is the PCA energy computed from tire/road noise of the tested road (Hz–Pa), e min the minimum PCA energy, i.e., sound collected from stationary vehicle with engine on (Hz–Pa), e max the maximum PCA energy of the analysis data in NCAT test (Hz–Pa), and e n the normalized PCA energy (0 ≤ e n ≤ 1, no dimension).
where v is the driving speed over the tested road (m/s), v min the minimum driving speed in NCAT test (8.94 m/s), v max the maximum driving speed in NCAT test (22.35 m/s), and v n the normalized driving speed (0 ≤ v n ≤ 1, no dimension).
The minimum and maximum values in Eqs. (3) and (4) are both collected from NCAT test.
As the general form of the model is listed in Eq. (2), the model parameter c i needs to be determined. To estimate a reasonable MTD value from this model, limiting conditions are required. Roe et al. [21] claimed that a typical MTD is from 0.2 to 3 mm. Hence, the limits should define the minimum MTD as well as the maximum one in the model. They are listed in Eqs. (5) and (6):
By substituting Eqs. (5) and (6) into Eq. (2), respectively, Eqs. (7) and (8) are obtained:
Accordingly, a least-squares (LS) analysis is performed over the NCAT test data. After the accuracy analysis with different orders being considered and the sensitivity analysis to the items in the determined order, the model is simplified and obtained as shown in Eq. (9). The normalized PCA energy (e n), the normalized driving speed (v n), and the product of these two variables (e n v n) are included in the model:
The accuracy of this model over NCAT data is 84 % of the actual MTD. Also, instead of from 0.4 to 1.5 mm of the MTDs in NCAT, it is expanded to a more reasonable range of 0.2 to 3 mm. It is possible that the accuracy of the model is decreased because of the expanded range. Therefore, the feasibility of the model will be tested from two aspects. One is a comparison of the accuracy of the model with the previous Energy Method and the other is its application to an urban road test.
5 Feasibility of the MTD prediction model
The next concern is the feasibility of this model. Feasibility here includes two parts: (1) advantage of PCA treatment before computing the acoustic energy; (2) reasonable prediction of MTD in field test. The first part for accuracy comparison will be done to the NCAT test data. The energy-based method is very similar to the procedure of the proposed method, but without PCA treatment to the data. If the accuracy level of the proposed approach is higher than the Energy Method without PCA treatment, more confidence will be gained for the application to an urban road. Then, the second part for field test ability will be performed over the Brockton test data. Even though the MTD of the road in Brockton is unknown, the rationality could be checked from the camera at the back of the vehicle (Fig. 1) with the road actual condition as well as the PCI value from CDM smith as introduced in the data collection part.
5.1 Accuracy analysis
The advantage of the present method is investigated through the accuracy comparison of MTD estimation with the Energy Method. The Energy Method here has exactly the same procedures as the PCA Energy Method, however, the former is not treated by PCA. The accuracy is computed from all the runs and speeds at NCAT test. Figure 3 is an example for MTD prediction by both methods at 56 kph. Figure 3 shows that the PCA Energy Method (dashed line with “+”) has a high accuracy (84 %) compared to the Energy Method (dash line with “O”), which proves that PCA treatment contributes a lot to high accuracy. Therefore, PCA treatment improves the accuracy of the PCA Energy Method, which is eligible to be applied for the urban road test.

MTD prediction at 56 kph by the two methods
5.2 Field test performance
The advantages of the PCA Energy Method are found through comparison with the Energy Method. However, the data used for the comparison were collected on an engineered NCAT track. A field test is needed to validate the feasibility of the model for a “real” road. Therefore, the test data collected from Brockton, MA, are analyzed to evaluate its performance on urban road.
A detailed investigation was conducted for a randomly selected road—Field St. Figure 4 is the MTD predictions along the distance of the road. For this case, acoustic data collected along a certain distance 7.8 m (optimal distance for MTD prediction) is used to estimate one MTD value as displayed in Fig. 4. To simplify the data processing and to assure the prediction accuracy, MTD is estimated every second, which is equivalent to 7.8 m at the speed of 28 kph. As explained before, high MTD corresponds to a poor road condition and vice versa. Four points A, B, C, and D in Fig. 4 are selected to check against the pavement surface pictures taken by the camera in Fig. 1.

Predicted MTD along Field St.
The predicted values of MTD of A, B, C, and D are 0.77, 0.82, 0.92, and 1.02 mm in ascending order. Accordingly, the pavement surface macrotexture of the corresponding pictures (Fig. 5) is supposed to vary from fine to coarse in order. The pictures shown in Fig. 5 coincide with their predicted MTDs. The surface macrotexture does change from fine to coarse with the predicted MTD increases from A to D as indicated in Fig. 4. Also, Fig. 5 illustrates how PCI value will decrease as MTD increases by checking that the area and severity of cracking in Fig. 5 intensifies as MTD increases. Therefore, the predicted MTDs match the true pavement macrotexture conditions from the observation of the corresponding pictures.

Pavement surface macrotexture condition [each picture is 1.9 m (width) × 1.3 m (height)]
Moreover, Fig. 6 shows the MTD predictions over 2 years on the same streets in the city of Brockton. Good repeatability is displayed. Additionally, most predicted MTDs in 2013 are higher than those in 2012, which matches the situation that road condition gets worse from 2012 to 2013.

Repeatability of MTD prediction
Based on the single road MTD variation analysis and the comparison of the MTD prediction over 2 years, it is concluded that the proposed PCA Energy Method is a promising tool for MTD prediction. Besides, the MTD value could indicate the road condition.
6 The application of predicted MTD
The predicted MTD shows the potential to indicate road condition in the field test results; therefore the predicted MTD values of the roads in Brockton is compared with the corresponding PCI values. Table 1 represents the predicted MTD of the roads in Brockton, MA, with corresponding PCI values. The results shown in Table 1 are plotted in Fig. 7. The predicted MTD increases as the PCI decreases, i.e., the predicted MTD increases as the road condition gets worse, which matches the expectation explained by Metro Nashville [14]. Since the MTD in this study is predicted based on the acoustic energy of tire/road noise, it can be an index for the degree of pavement damage, which is related to the PCI value [2, 4]. Wang et al. [22] developed a PCI prediction method by introducing the predicted MTD in this study, the standard deviation (Std) of Fourier transform results of tire/road noise, and the standard deviation of dynamic tire pressure collected by the dynamic tire pressure sensor shown in Fig. 1. It is proven that the predicted MTD and the Std of Fourier transform results of tire/road noise can predict PCI accurately. Hence, MTD is able to indicate the pavement condition. However, it is to be emphasized that this is true only for the same mixture type of pavement. The pavements shown in Fig. 7 have the same mixture type, so the PCI can be directly correlated with the predicted MTD.

PCI variation with predicted MTD for different roads
For pavements with different mixture types, the predicted MTD cannot straightly project to the corresponding PCI. Figure 8 shows the MTD range for pavements with different mixture types. For example, for open grade friction course (OGFC) pavement, the MTD ranges from 2.2 to 3 mm, and for stone matrix asphalt (SMA) pavement from 1.0 to 1.6 mm. Therefore, it is concluded that the pavement condition assessment through MTD depends on a mixture method of pavement. A more reasonable scale needs be developed to indicate pavement condition in real time. Motivated by the knowledge of pavement segregation and its way to determine the segregation level, a method to evaluate the severity of pavement deterioration is derived. Pavement segregation indicates the debonding between aggregates, which will accelerate pavement distresses [2]. Stroup and Brown summarized the relationship between macrotexture and segregation level [2].

MTD range for pavements with different mixture types (OGFC is short for open grade friction course; SMA is short for stone matrix asphalt)
Referring to segregation level identification [2], the concept of texture ratio can be incorporated to represent the severity of pavement deterioration. In this paper, a new term “macrotexture index (MTI)” is created to represent the texture ratio to rank the pavement deterioration by the predicted MTD. Equation 10 is developed to calculate the MTI for pavement condition indication:
where MTD is the predicted MTD from tire/road noise by the PCA Energy Method (mm), MTD_good the mean MTD of the range for a certain mixture type of pavement with good condition (mm) and MTI the texture ratio (no dim.).
The key in Eq. 10 to get the MTI is to define the MTD_good, which represents the MTD of the range for a certain mixture type of pavement with good condition. Moreover, MTD_good is the denominator, so the function of this MTD_good is to classify the mixture type of pavement. Then dividing the predicted MTD by MTD_good, the MTI is obtained. Since different surface treatment and mix type will lead to different MTD scale level (Table 2), probability distribution of the estimated MTDs within a certain distance is referred to identify different types of mixture.
The flowchart to determine the MTD_good is indicated in Fig. 9. For example, for one street about 200 m, if over 60 % of the predicted MTD falls in the range listed in Table 2, this street is identified as the corresponding type of surface mixture and the MTD_good is determined to be the minimum value of the range shown in Table 2. For instance, if over 60 % of predicted MTDs of one street are in the range of 0.6–1.2 mm, the mixture type of this street is classified as course asphalt concrete and the MTD_good is 0.6 mm. The value of 60 % is obtained by testing over 960 km of urban road. Moreover, up to 2000, course asphalt concrete with the mixture method of superpave has accounted for 62 % of the total hot-mix asphalt (HMA) across the USA [23]. Thus, if the predicted MTDs within 200 m does not fall in any of the three ranges, it will be defaulted as coarse asphalt concrete.

Flowchart for determination of MTD with good pavement condition
With the flowchart in Fig. 9, an approach to rate the pavement deterioration level based on the predicted MTD through microphone is investigated and an example is shown in Fig. 10. In this example, the MTD_good is 0.6 mm, since the pavement is identified as course asphalt concrete pavement. Hence, the range of MTD with good pavement condition varies from 0.6 to 1.2 mm. The minimum value (0.6 mm) is selected to be the MTD_good. Accordingly, the MTD is converted to the MTI at each second corresponding to about 7.8 m distance. From the corresponding pictures of Pavement A to Pavement G (Fig. 10), the pavement condition gets worse as the MTI increases. Moreover, in Pavement F and G some patches start appearing besides cracks, which also indicates that this texture ratio has potential to identify the distress type combined with a certain PCI. To understand how the MTI indicates road condition, the predicted MTD for different roads in Table 1 is converted to MTI, and the correlation between PCI and MTI is demonstrated in Fig. 11. Since the tested roads belong to the same type of pavement, MTD works the same way as MTI. However, when the mixture types of pavement are different, the advantage of MTI will be pronounced by eliminating the influence on MTD scale due to this difference. It is a significant improvement for pavement condition assessment. With the MTI, the difference caused by different pavement mixture designs would be phased out, and the pavement condition assessment would become more objective.

Example of severity of pavement deterioration observed from texture ratio for Field St. in Brockton

PCI variation with MTI for different roads
7 Conclusions
This paper conducted an overall study to produce the PCA Energy Method for MTD prediction based on the tire/road acoustic energy of the first principal component over the frequency band 140–700 Hz. To simplify the model, Taylor expansion theory is applied to determine the variables including PCA energy and driving speed. The prediction range from 0.2 to 3 mm is validated by field test with good repeatability. The MTD can be predicted every second at speed from 32 to 80 kph.
The predicted MTD could be used for severity of pavement deterioration evaluation. The macrotexture is converted from the predicted MTD to MTI with the mixture type of pavement considered. The new scale MTI eliminates the difference caused by different pavement mixture design, so that a more accurate PCI estimation is expected. Besides, a waterproof equipment is needed for use under rainy days. Accordingly, the influence of wet surface in the prediction will be explored.
References
ISO 13473–1 (1997) Characterization of pavement texture by use of surface profiles—part 1: determination of mean profile depth, 1st edn. American National Standards Institute, Washington, DC
Stroup-Gardiner M, Brown ER (2000) Segregation in hot-mix asphalt pavements. Report no. 441, Transportation Research Board
Henry JJ (2000) Evaluation of pavement friction characteristics, vol 291. Transportation Research Board
Flintsch GW, de Leon E, McGhee K, Al-Qadi I (2003) Pavement surface macrotexture measurement and application. Transp Res Rec J Transp Res Board 1860(1):168–177
ASTM (2004) Standard test method for measuring pavement macrotexture depth using a volumetric technique. ASTM E965, West Conshohocken
ASTM (2009) Standard practice for calculating pavement macrotexture mean profile depth. ASTM E1845, West Conshohocken
Veres RE, Henry JJ, Lawther JM (1975) Use of tire noise as a measure of pavement macrotexture. In: Rose JG (ed) Symposium named Surface texture versus skidding: measurements, frictional aspects, and safety features of tire-pavement interactions. ASTM, West Conshohocken, pp 18–28
Sandberg U, Ejsmont JA (2002) Tyre/road noise reference book. Informex, Kisa
Saykin V, Zhang Y, Cao Y, Wang ML, McDaniel JG (2013) Pavement macrotexture monitoring through the sound generated by tire-pavement interaction. J Eng Mech 139(3):264–271
Zhang Y, Ma X, McDaniel JG, Wang ML (2012) Statistical analysis of acoustic measurements for assessing pavement surface condition. In: Proceedings of SPIE smart structures and materials + nondestructive evaluation and health monitoring. International Society for Optics and Photonics, Bellingham, p 83471F
Zhang Y, McDaniel J, Gregory, Wang ML (2014) Estimation of pavement macrotexture by principal component analysis of acoustic measurements. J Transp Eng 140(2):04013004-1–04013004-11
Sandberg U (2003) The multi-coincidence peak around 1000 Hz in tyre/road noise spectra. In: Euronoise Conference, paper ID, vol 498
KMS & Associates, Inc. (2007) Micro PAVER: Pavement Management System. http://www.city.pittsburgh.pa.us/district8/assets/07_pavement_mgt_system.pdf. Accessed 8 May 2013
Metro Nashville (2006) Metro Nashville long range paving plan, Chapter 3 pavement management data. http://mpw.nashville.gov/IMS/Paving/Documents/Chapter_3.pdf. Accessed 12 May 2013
Wang HQ, Song ZH, Wang H (2002) Statistical process monitoring using improved PCA with optimized sensor locations. J Process Control 12(6):735–744
Pearson K (1901) On lines and planes of closest fit to systems of points is space. Philos Mag 6(23):559–572
Hotelling H (1933) Analysis of a complex of statistical variables into principal components. J Educ Psychol 24(6):417–441
Jolliffe IT (2002) Principal component analysis, 2nd edn. Springer, New York
Greenberg MD (1998) Advanced engineering mathematics, 2nd edn. Pearson Education, India, pp 1236–1242
Dienes P (1957) The Taylor series: an introduction to the theory of functions of a complex variable. Dover Publications, New York
Roe PG, Webster DC, West G (1991) The relation between the surface texture of roads and accidents. Research report 296, Transport and Road Research Laboratory, Wokingham, UK, TRL. http://www.roadsafetyobservatory.com/Evidence/Details/10569. Accessed 6 Mar 2013
Wang ML, Birken R Shamsabadi SS (2014) Framework and implementation of a continuous network-wide health monitoring system for roadways. In: Proceedings of the SPIE 9063, nondestructive characterization for composite materials, aerospace engineering, civil infrastructure, and homeland security, Vol. 9063. California, pp 1–12
WesTrack (2001) Superpave mixture design guide. WesTrack Forensic Team consensus report. Federal Highway Administration, Washington, DC
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Zhang, Y., McDaniel, J.G. & Wang, M.L. Pavement macrotexture measurement using tire/road noise. J Civil Struct Health Monit 5, 253–261 (2015). https://doi.org/10.1007/s13349-015-0100-4
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s13349-015-0100-4