
Abstract
Nonlinear evolution equations (NLEEs) are extensively used to establish the elementary propositions of natural circumstances. In this work, we study the Konopelchenko–Dubrovsky (KD) equation which depicts non-linear waves in mathematical physics with weak dispersion. The considered model is investigated using the combination of generalized exponential rational function (GERF) method and dynamical system method. The GERF method is utilized to generate closed-form invariant solutions to the (2+1)-dimensional KD model in terms of trigonometric, hyperbolic, and exponential forms with the assistance of symbolic computations. Moreover, 3D, 2D combined line graph and their contour graphics are displayed to depict the behavior of obtained solitary wave solutions. The model is observed to have multiple soliton profiles, kink-wave profiles, and periodic oscillating nonlinear waves. These generated solutions have never been published in the literature. All the newly generated soliton solutions are checked by putting them back into the associated system with the soft computation via Wolfram Mathematica. Moreover, the system is converted into a planer dynamical system using a certain transformation and the analysis of bifurcation is examined. Furthermore, the quasi-periodic solution is investigated numerically for the perturbed system by inserting definite periodic forces into the considered model. With regard to the parameter of the perturbed model, two-dimensional and three-dimensional phase portraits are plotted.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
1.1 Aims and scope
Nonlinear evolution equations (NLEEs) have extensive significance in the area of applied mathematics and physics. Finding the exact solutions for NLEE is an essential task as NLEE describes numerous phenomenon in nonlinear dynamics, engineering, optical fibre, plasma physics, fluid mechanics, natural sciences, biomedical applications etc. A large number of researchers and mathematicians have developed various effective techniques for computing exact solutions of NLPDEs (nonlinear partial differential equations), for instance, tanh function method [1], Hirota’s bilinear method [2, 3], the Jacobi elliptic function expansion method [4], Kudryashov method [5], the \(\frac{G'}{G}\)-expansion method [6], Darboux transformation method [7], the Backlund transformation method [8], the inverse scattering method [9], Lie-symmetry analysis [10], multiple exp-function method, and many others. Among these techniques, GERF method [11,12,13,14] is very effective, robust and straightforward approach for finding the abundant exact soliton-form solutions of various NLPDEs.
1.2 Historical background
Konopelchenko and Dubrovsky [15] derived (2+1)-dimensional KD (Konopelchenko–Dubrovsky) equation in 1984.
They derived some nonlinear equations in (2+1)-dimensions (x, y, t) for one dependent variable u(x, y, t) which can be represented as commutativity condition \([L,T]=LT-TL=0\). The differential operator L is of the form
where \(\partial _x\equiv \frac{\partial }{\partial x}\), \(\partial _y\equiv \frac{\partial }{\partial y_{}}\), \(V_0(x,y,t),...,V_N(x,y,t)\) are scalar functions. The operator T is explicitly defined. They have also shown that the obtained equations are the two-dimensional generalization of the well-known Gardner equation, the Sawada-Kotera, the Kaup-Kupershmidt and the Harry Dim equations. Accordingly they derived the following (2+1)-dimensional Konopelchenko–Dubrovsky (KD) model
where u and v are the differentiable functions with respect to x, y and t variables. Here, a and b are arbitrary constants. It is generalization of other well known equations as follows:
-
If \(a=0\), (1) reduces into the well-known Kadomtsev–Petviashvili(KP) equation.
-
If \(b=0\), it turns into the modified KP equation.
-
If \(u_y=0\), the second row of Eq. (1) reduces into the Gardner equation, the combination of KdV and modified KdV.
1.3 Literature survey
Many reseachers have used some productive techniques to investigate the exact analytical solutions of the KD system. In 2014 Kumar et. al [16] used Lie symmetry analysis with particular choices of the functions of t as well as travelling wave hypothesis to extract solutions to KD equations. Motivated by their work in 2018 Kumar and Tiwari [17] obtain exact solutions of the KD system by using similarity transformation method with arbitary choice of functions. The bifurcation theory method of planar dynamical systems is efficiently applied by Tian-lan He [18] in 2008 to find the bounded traveling wave solutions of the (2 + 1) dimensional Konopelchenko–Dubrovsky equations. In 2019 Alfalqi et al. [19] applied the modified simplest equation method and B-spline method to KD-equation. Recently, Khater et al. [20] implement modified auxiliary equation technique to this system to find analytical traveling wave solutions. Ren et al. [21] in 2016 obtained the non-local symmetries for the KD equation with the truncated Painleve method and the Mobius conformal invariant form. By applying the modified extended direct algebraic method, Seadawy et. al. [22] in 2019 constructed some exact traveling wave solutions in the terms of Jacobi elliptic function, Weierstrass elliptic function solutions, new elliptic and so on. Song et. al. [23] obtained exact solutions of the equation by applying extended Riccati equation rational expansion method.
1.4 Motivation
Motivated by the rich literature available on KD system, in this research article, we investigated the (2 + 1)-dimensional Konopelchenko–Dubrovsky (KD) model (1) using two techniques, GERF (generalized exponential rational function) technique and dynamical system method. To best of our knowledge considered system had not been taken into consideration by these techniques. This motivated us to apply one of the effective methods available in the literature to construct abundant exact analytical closed-form solutions for the system (1).
Moreover the dynamics of NLPDEs grants us to understand and predict the acceptable structures of the associated complex nonlinear systems. A soliton or solitary wave is the particle-like object with the finite energy and amplitude, which save its form during propagation and restore it after the collision with another solitons. Nowadays, as a consequence, it is a very hot subject matter to derive the exact closed form solutions of NLPDEs. The soliton-form solutions of such type of NLPDEs are extensively favorable in the various areas such as nonlinear sciences, mathematical physics, plasma physics, applied mathematics, engineering, applied sciences and nonlinear dynamics. Also in recent years, the investigation of differential equations through the bifurcation analysis has become an important topic in the field of research. Bifurcation is a rapid quantitative shift in the model with a gentle change in the values of parameters. The exploration of the dynamics of nonlinear periodic forms is a significant part for the investigation of the physical propositions in detail. For example, the occurrence of homoclinic orbits, smooth heteroclinic orbits and periodic orbits for travelling wave models describes the periodic wave solutions, oscillatory travelling wave solutions, smooth kink wave solutions and smooth solitary solutions for considered PDEs, respectively. One can refer to [24,25,26,27,28] for the study of recent work in this field.
1.5 Structure of the paper
The strategy of this article is organised as follows: Sect. 2 deals with the introduction and methodology of GERF approach is presented. In Sect. 3, we find exact travelling wave solution of KD equations. This section also includes some particular 3D, 2D combined line graph and their contour graphics which provide more explanation to the behavior of these generated solutions. Graphically, periodic-solitonic structures, kink-wave structures, and the interaction of multi-soliton and kink wave solution have been observed for some soliton solutions. Section 4 deals with the bifurcation analysis of the dynamical system of Eq. (1), and relative phase portraits are plotted for the considered system. Section 5 is related to the investigation of quasi-periodic solution for the perturbed system by inserting perturbation term to the associated model (1). Finally, the conclusion is given at the end.
2 Methodology of GERF method
This GERF method was introduced by Ghanbari and Inc [11]. We will provide an explanation of GERF technique step-wise in this section:
-
Let us consider the system of two nonlinear PDEs including three variables x, y and t given as
$$\begin{aligned}&{\mathcal {M}}(u,v,u_{x},u_{y},u_{t},v_{x},v_{y},v_{t},u_{xx},u_{xt}v_{x},u_{yx}...)=0.\nonumber \\&{\mathcal {N}}(u,v,u_{x},u_{y},u_{t},v_{x},v_{y},v_{t},u_{xx},u_{xt}v_{x},u_{yx}...)=0. \end{aligned}$$(2)here \(u(x,y,t)=U(\xi )\) and \(v(x,y,t)=V(\xi )\) are the wave transformations where \(\xi =\alpha x+\beta y-\mu t \) is used to obtain a system of ODEs (ordinary differential equations) which further provides an ordinary differential as
$$\begin{aligned} {\mathcal {W}}(U,U',U'',...)=0, \end{aligned}$$(3)where \(U=U(\xi ),~~U'=\frac{dU}{d\xi }\) and \(\alpha \), \(\beta \) and \(\mu \) are constants, to be calculated later.
-
Assume that the solitary wave solution of (3) can be represented as
$$\begin{aligned} U(\xi )=R_0+\sum _{k=1}^{M}R_{k}\Psi (\xi )^{k}+\sum _{k=1}^{M}S_{i}\Psi (\xi )^{-k}, \end{aligned}$$(4)where
$$\begin{aligned} \Psi (\xi )=\frac{r_1 e^{s_1\xi }+r_2 e^{s_2\xi }}{r_3 e^{s_3\xi }+r_4 e^{s_4\xi }}, \end{aligned}$$(5)and \(r_i,~ s_i\) \((1 \le i \le 4)\), \(R_0\), \(R_k\) and \(S_k\) \((1 \le k \le M)\) are constants to be calculated and M (a positive integer) is evaluated by homogeneous balancing method.
-
Substituting (4) into (3) plugging with (5) and arranging all the terms yields
$$\begin{aligned} {\mathfrak {A}}(e^{s_1\xi },e^{s_2\xi },e^{s_3\xi },e^{s_4\xi },....)=0. \end{aligned}$$(6)Equalizing the coefficients of \({\mathfrak {A}}\) to zero, yields a set of algebraic equations.
-
With the assistance of Mathematica, we find the values of the coefficients \(R_0\), \(R_k\), \(S_k\), \(\alpha \), \(\beta \) and \(\mu \) by solving above mentioned algebraic equations.
-
Inserting all these values into (4) we get the solution of determining Eq. (3). Accordingly we can get other function and hence we achieve some new solitary wave solutions of (2).
3 GERF method—applications
In this section, we apply the GERF technique to construct the exact closed-form solutions of (2+1)-dimensional Konopelchenko–Dubrovsky (KD) model (1).
3.1 GERF method for the (2+1)-D Konopelchenko–Dubrovsky(KD) model
Making use of wave transformation \(u(x,y,t)=U(\xi )\) and \(v(x,y,t)=V(\xi )\) where \(\xi =\alpha x+\beta y-\mu t \) in Eq. (1), we obtain the following system of ODEs
Integrating the first equation we find,
Putting it into the second equation of (7) and integrating the resulting equation, and neglecting the constant of integration, the following ODE is obtained as
Using balancing principle on terms \(U^{(3)}\) and \(U''\) of the Eq. (9), we get \(M+2=3M\) which yields \(M=1\). Employing \(M=1\) in (4), we obtain the trial solution given as
By using Eq. (10) into (9) and according to the step of GERF method, the following cases are considered for finding the exact solitary wave solutions of (1) with the assistance of Mathematica.
Family 1: For \([r_1,r_2,r_3,r_4]=[1,-3,-1,1]\) and \({[s_1,s_2,s_3,s_4]=[1,-1,1,-1]}\), Eq. (5) yields
With the assistance of soft computation via Mathematica, we solve algebraic equation for obtaining the values of parameters and hence following set of solutions can be achieved.
Solution set 1.1:
Substituting the values of above known-constant parameters into Eq. (10) and plugging it with Eq. (9), we obtain the expression for U as
Hence, from Eq. (8), we obtain the expression for V as
Accordingly, the solution of (1) is obtained as
Solution set 1.2:
Substituting the values of above known-constants into Eq. (10) and plugging it with Eq. (9), we obtain the expression for U as
Hence, from Eq. (8), we obtain the expression for V as
Accordingly, the solution of (1) is obtained as
Solution set 1.3:
Substituting the values of known-constants mentioned above into Eq. (10) and plugging it with Eq. (9), we obtain the value for U as
Hence, from Eq. (8), we obtain the expression for V as
Accordingly, the solution of (1) is obtained as
Family 2: For \([r_1,r_2,r_3,r_4]=[-5{\dot{\iota }},5{\dot{\iota }},6,6]\) and \({[s_1,s_2,s_3,s_4]=[3{\dot{\iota }},-3{\dot{\iota }},0,0]}\), Eq. (5) yields
With the assistance of soft computation via Mathematica, we solve algebraic equation for obtaining the values of parameters and hence following set of solutions can be achieved.
Solution set 2.1:
We substitute the values of known-constants mentioned above and expression (21) into Eq. (10), and plugging it with Eq. (9), we obtain the value for U as
Hence, from Eq. (8), we obtain the expression for V as
Accordingly, the solution of Eq. (1) is obtained as
Solution set 2.2:
We substitute the values of known-constants mentioned above and expression (21) into Eq. (10), and plugging it with Eq. (9), we obtain the value for U as
Hence, from Eq. (8), we obtain the expression for V as
Accordingly, the solution of (1) is obtained as
Family 3: For \([r_1,r_2,r_3,r_4]=[1,0,1,1]\) and \({[s_1,s_2,s_3,s_4]=[1,0,1,0]}\), Eq. (5) yields
With the assistance of soft computation via Mathematica, we solve algebraic equation for obtaining the values of parameters and hence following set of solutions can be achieved.
Solution set 3.1:
We substitute the values of known-constants described above and expression (28) into Eq. (10), and plugging it with Eq. (9), we obtain the expression for U as
Hence, from Eq. (8), we obtain the expression for V as
Accordingly, the solution of Eq. (1) is obtained as
Solution set 3.2:
We substitute the values of known-constants mentioned above and expression (28) into Eq. (10), and plugging it with Eq. (9), we obtain the expression for U as
Hence, from Eq. (8), we obtain the expression for V as
Accordingly, the solution of (1) is obtained as
Solution set 3.3:
We substitute the values of known-constants mentioned above and expression (28) into Eq. (10), and plugging it with Eq. (9), we obtain the expression for U as
Hence, from Eq. (8), we obtain the expression for V as
Accordingly, the solution of (1) is obtained as
Family 4: For \([r_1,r_2,r_3,r_4]=[-2{\dot{\iota }},-2{\dot{\iota }},5,{-}5]\) and \([s_1,s_2,s_3,s_4]=[3{\dot{\iota }},-3{\dot{\iota }},3{\dot{\iota }},{-}3{\dot{\iota }}]\), Eq. (5) yields
With the assistance of soft computation via Mathematica, we solve algebraic equation for obtaining the values of parameters and hence following set of solutions can be achieved.
Solution set 4.1:
We substitute the values of known-constants described above and expression (38) into Eq. (10), and plugging it with Eq. (9), we obtain the expression for U as
Hence, from Eq. (8), we obtain the expression for V as
Accordingly, the solution of (1) is obtained as
Solution set 4.2:
We substitute the values of known-constants mentioned above and expression (38) into Eq. (10), and plugging it with Eq. (9), we obtain the expression for U as
Hence, from Eq. (8), we obtain the expression for V as
Accordingly, the solution of (1) is obtained as
Solution set 4.3:
We substitute the values of known-constants described above and expression (38) into Eq. (10), and plugging it with Eq. (9), we obtain the expression for U as
Hence, from Eq. (8), we obtain the expression for V as
Accordingly, the solution of (1) is obtained as
Family 5: For \([r_1,r_2,r_3,r_4]=[1,1,1,1]\) and \({[s_1,s_2,s_3,s_4]=[\frac{3}{2},-\frac{3}{2},0,0]}\), Eq. (5) yields
With the assistance of soft computation via Mathematica, we solve algebraic equation for obtaining the values of parameters and hence following set of solutions can be achieved.
Solution set 5.1:
We substitute the values of known-constants mentioned above and expression (48) into Eq. (10), and plugging it with Eq. (9), we obtain the expression for U as
Hence, from Eq. (8), we obtain the expression for V as
Accordingly, the solution of (1) is obtained as
Solution set 5.2:
We substitute the values of known-constants described above and expression (58) into Eq. (10), and plugging it with Eq. (9), we obtain the expression for U as
Hence, from Eq. (8), we obtain the expression for V as
Accordingly, the solution of (1) is obtained as
Solution set 5.3:
We substitute the values of known-constants mentioned above and expression (58) into Eq. (10), and plugging it with Eq. (9), we obtain the expression for U as
Hence, from Eq. (8), we obtain the expression for V as
Accordingly, the solution of (1) is obtained as
Family 6: For \([r_1,r_2,r_3,r_4]=[\frac{5}{2},-\frac{5}{2},2,2]\) and \({[s_1,s_2,s_3,s_4]=[4,-4,0,0]}\), Eq. (5) yields
With the assistance of soft computation via Mathematica, we solve algebraic equation for obtaining the values of parameters and hence following set of solutions can be achieved.
Solution set 6.1:
We substitute the values of known-constants mentioned above and expression (58) into Eq. (10), and plugging it with Eq. (9), we obtain the expression for U as
Hence, from Eq. (8), we obtain the expression for V as
Accordingly, the solution of (1) is obtained as
Solution set 6.2:
We substitute the values of known-constants described above and expression (58) into Eq. (10), and plugging it with eq. (9), we obtain the expression for U as
Hence, from Eq. (8), we obtain the expression for V as
Accordingly, the solution of (1) is obtained as
3.2 Results and discussion
The (2+1)-dimensional Konopelchenko–Dubrovsky (KD) model delivers new forms of exact solutions in terms of exponential, trigonometric, and hyperbolic functions, including tanh, coth, sech, csch, tan, cot, and their combinations. These solutions include periodic-wave solutions, kink waves, combinations of kink and multi solitons, periodic lumps and periodic solitons. In this section, we discuss physical interpretations of the obtained solutions via GERFM approach and numerical simulations by choosing different values of the involving parameters.
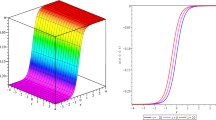
Figure 1 depicts 3D, 2D combined line graph and their contour shapes for the solution (14) corresponding to the values \(\alpha =0.188,~ a=2,~ b=-0.195\) with \(-90\le x\le 90, -300\le y\le 300\). 1(a) represents interaction of kink waves and multi soliton wave profile. 1(b) shows wave propagation at different time.
Figure 2 illustrates depicts 3D, 2D combined line graph and their contour shapes for the solution (24) corresponding to the values \(\alpha =0.108,~ a=1,~ b=0.2\) with \(-20\le x\le 20, -30\le y\le 30\) at time \(t=0.1\). In Fig. 2b hyperbolic form wave solution is depicted at different time while in 2(c) contour shape has been plotted for \(-50\le x\le 50, -50\le y\le 50\).
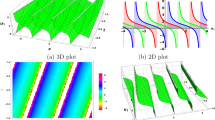
Figure 3 represents 3D, 2D combined line graph and their contour shapes for solution (34) corresponding to the values \(\alpha =2.5,~ a=1,~ b=4.59\) with \(-2\le x\le 2, -3\le y\le 3\) at time \(t=0.01\). It is observed from the investigation of 3a that the obtained solution (34) behaves like kink wave. Moreover, by 2D plot it is observed that the wave is shifted towards the negative x-axis as we change time.
Figure 4 depicts traveling periodic solitonic wave profile for solution (41) where 3D plots are shown for real, imaginary and absolute values corresponding to the values \(\alpha =0.1,~ a=1.2,~ b=0.358\) with \(-20\le x\le 20, -30\le y\le 0\) at time \(t=5\).

Wave propogation structures for solution (14)

Wave propagation structures for solution (24)
Figure 5 depicts 3D, 2D combined line graph and their contour shapes for absolute value of the solution (44) corresponding to the values \(\alpha =0.108,~ a=1.2,~ b=0.357\) with \(-20\le x\le 20, -30\le y\le 30\) at time \(t=0.5\). We observed by 5a that solution (44) represents periodic wave solitonic structure and in 5c their contour shapes has been recorded. By wave propagation in 5b it is observed that there is change in the amplitude of the wave with the change in the time.
Figure 6 illustrates 3D, 2D combined line graph and their contour shapes for absolute value of the solution (51) corresponding to the values \(\alpha =0.259,~ a=1.23,~ b=0.32\) with \(-50\le x\le 50, -50\le y \le 50\) at time \(t=0.1\). It is observed that 6(a) shows periodic soliton wave profile. Moreover, it is observed by wave propagation in 6(b) that with the increase in time the amplitude of the solitary wave decreases towards origin.
Figure 7 shows 3D, 2D combined line graph and their contour shapes for absolute value of the solution (61) corresponding to the values \(\alpha =0.18,~ a=1,~ b=0.35\) with \(-50\le x\le 40, -30\le y \le 30\) at time \(t=0.3\). It is observed that 7a shows periodic multi-soliton wave structure. Moreover, it is observed by wave propagation in 7b that with the increase in time the amplitude and width of the solitary wave changes.

Wave propagation structures for solution (34)
4 Bifurcation analysis
We explore the new dynamics of KD system (1), in this section, by utilizing the concepts of bifurcation theory.
After simplification, Eq. (9) can be rewritten in the following form of planar dynamical system as
where \(A_1=\frac{a^2}{2\alpha ^2}\), \(A_2=\frac{3}{2}\biggl (\frac{2b}{\alpha ^2}-\frac{a \beta }{\alpha ^3}\biggr )\) and \(A_3=\frac{3 \beta ^2}{\alpha ^4}+\frac{\mu }{\alpha ^3}\).
The three equilibrium points for the above system of differential equations are computed as (0, 0), \((U_1,0)\) and \((U_2,0)\) on U-axis, where
and \(\delta = A_2^2+4A_1A_3\).
Let \(M(U_i,0)\) is the coefficient matrix of the linearized system of (65) at equilibrium point \((U_i,0)\); J and T be the determinant and trace of the matrix M, respectively. Here,
By using the theory of planar dynamical system [29], we can discuss following definitions for the critical points \((U_i,0)\).
-
(1)
When \(J<0\), then \((U_i,0)\) is a saddle point.
-
(2)
When \(J>0\) and \(T^2-4J\ge 0\), then \((U_i,0)\) is a node; which is stable if \(T<0\) and unstable if \(T>0\).
-
(3)
When \(J>0\), \(T^2-4J<0\) and \(T\ne 0\), then \((U_i,0)\) is a focus; which is stable if \(T<0\) and unstable if \(T>0\).
-
(4)
When \(J>0\) and \(T=0\), then \((U_i,0)\) is a center.
-
(5)
When \(J=0\) and Poincare index of \((U_i,0)\) is zero, then it is called the zero point.
For different choices of parameters \(A_1, A_2\) and \(A_3\), various cases in detail are explained as:

Wave propagation structures for solution (41)

Wave propagation structures for solution (44)

Wave propagation structures for solution (51)

Wave propagation structures for solution (61)

Phase portraits
Case 1 \(A_1>0,~ A_2>0,\) and \(A_3>0\): Fig. 8a exhibits the phase portrait for the values of parameters considered as \(A_1=1,~ A_2=1,~ A_3=1\). For this case, we have three equilibrium points where (0, 0) is center point whereas \((U_1,0)\) and \((U_2,0)\) are saddle points. Here, presence of nonlinear periodic trajectory and nonlinear homoclinic trajectory ensure the occurrence of closed-form solutions of the KD Eq. (1).
Case 2 \(A_1>0,~ A_2>0,\) and \(A_3<0\): Fig. 8b explains the phase portrait for the values of parameters given as \(A_1=1,~ A_2=1,~ A_3=-1\). For this case, we have only one real equilibrium point, trivial equilibrium point (0, 0), which is a saddle point. Here, it has been observed that the closed form trajectories are not obtained.

Phase portraits
Case 3 \(A_1>0,~ A_2<0,\) and \(A_3>0\): Fig. 8c describes the phase portrait for the values of parameters given by \(A_1=1,~ A_2=-1,~ A_3=1\). For this case, we have three equilibrium points, where (0, 0) is a center point whereas \((U_1,0)\) and \((U_2,0)\) are saddle points. In this case also, the presence of nonlinear homoclinic trajectory and nonlinear periodic trajectory ensure the occurrence of closed form solutions of the KD Eq. (1).
Case 4 \(A_1>0,~ A_2<0,\) and \(A_3<0\): Fig. 8d exhibits the phase portrait for the parameter values \(A_1=1,~ A_2=-1,~ A_3=-1\). For this case, we have only one equilibrium points namely (0, 0) which is a saddle point. Here, closed form trajectories are not obtained.
Case 5 \(A_1<0,~ A_2>0,\) and \(A_3>0\): Fig. 9a describes the phase portrait for the values of parameters \(A_1=-1,~ A_2=1,~ A_3=1\). For this case, we have obtained only one real equilibrium point, namely (0, 0) which is a center point. For this case, presence of non-linear periodic trajectories ensures the existence of closed form solutions.
Case 6 \(A_1<0,~ A_2>0,\) and \(A_3<0\): Fig. 9b exhibits the phase portrait for the parameter values \(A_1=-1,~ A_2=1,~ A_3=-1\). For this case, we have three equilibrium points, where (0, 0) is a saddle point whereas \((U_1,0)\) and \((U_2,0)\) are center points. Here, the presence of nonlinear periodic trajectory and nonlinear homoclinic trajectory ensure the occurrence of closed form solutions of the KD Eq. (1).
Case 7 \(A_1<0,~ A_2<0,\) and \(A_3>0\): Fig. 9c describes the phase portrait for the values of parameters \(A_1=-1,~ A_2=-1,~ A_3=1\). For this case, we have obtained only one real equilibrium point namely (0, 0) which is a center point. For this case also, presence of non-linear periodic trajectories ensures the existence of closed for solutions.
Case 8 \(A_1<0,~ A_2<0,\) and \(A_3<0\): Fig. 9d explains the phase portrait for the parameter values \(A_1=-1,~ A_2=-1,~ A_3=-1\). For this case, we have three equilibrium points where (0, 0) is a saddle point whereas \((U_1,0)\) and \((U_2,0)\) are center points. Here, the presence of nonlinear periodic trajectory and nonlinear homoclinic trajectory insure the occurrence of closed form solutions of the KD Eq. (1).
5 Quasi-periodic solution
The exploration of different dynamics of the perturbed system of the main system (1) by adding perturbation term \(\rho _1 cos(\sigma \eta )\) is investigated in this section. Thus, equation (7) with the addition of perturbation term becomes
where \(\rho _1\) is constant representing the intensity of the perturbed term and \(\sigma \) represents the frequency. To analyze the chaotic and periodic behavior of system (7) with the existence of a perturbation term, we will fix the influence of force and frequency of disruption and retain the physical parameters of the system under observation.

For \(A_1=-0.1\), \(A_2=1.056\), \(A_3=8.12\), \(\rho _1=-0.8\) and \(\sigma =\pi \), 2-D and 3-D phase portraits of the perturbed system (66)

For \(A_1=-1\), \(A_2=-1.056\), \(A_3=8.12\), \(\rho _1=-0.8\) and \(\sigma =\pi \), 2-D and 3-D phase portraits of the perturbed system (66)
Figure 6 exhibits the 2-D and 3-D phase portraits of the perturbed model (66) for \(A_1=-0.1\), \(A_2=1.056\), \(A_3=8.12\), \(\rho _1=-0.8\) and \(\sigma =\pi \). Figure 6 depicts the 2-D and 3-D phase portraits for the perturbed system (66) for \(A_1=-1\), \(A_2=-1.056\), \(A_3=8.12\), \(\rho _1=-0.8\) and \(\sigma =\pi \). Figure 6 describes the 2-D and 3-D phase portraits for the perturbed system (66) for \(A_1=-0.93\), \(A_2=-1.056\), \(A_3=-2.5\), \(\rho _1=-0.8\) and \(\sigma =\pi \).

For \(A_1=-0.93\), \(A_2=-1.056\), \(A_3=-2.5\), \(\rho _1=-0.8\) and \(\sigma =\pi \), 2-D and 3-D phase portraits of the perturbed system (66)
6 Novelty and comparison
In this section, we have briefly compared our attained exact traveling wave solutions in the form of periodic-solitons, kink-wave profiles, the interaction of multi-soliton and kink-wave solutions, and other types of solitonic structures with the work carried out by the reseachers [20, 22, 23] and concludes the following:
-
In [23], Song et. al. obtained exact solutions of the equation by applying extended Riccati equation rational expansion method.
-
We exhibit the dynamics of solitary wave profiles of some soliton solutions in three dimensional, two dimensional and contour graphics by selecting appropriate values for the parameters \(a, b, \alpha , \beta \) and \(\mu \), and hence we believe that the evolutionary profile dynamics of generated exact closed-form solutions are very impressive and advantageous for physical phenomena see Figs. 1, 2, 3, 4, 5, 6, 7.
-
We have used generalized exponential rational function method, through which we have obtained various soliton solutions in more generalized form than the earlier published articles [23]. The solutions which we have generated are in the form of exponential, trigonometric and hyperbolic functions along with their combinations involving tanh, coth, tan, cot, sec and cosec functions.
-
Also, the quasi-periodic solution is investigated for the perturbed system by including definite forces to the considered model. Moreover, and two-dimensional and three-dimensional phase portraits are also plotted for the perturbed system which is not recorded in the [18].
-
Moreover, we have observed the chaotic and periodic attractors for the perturbed system which is not shown in [18] see Figs. 10, 11, 12.
7 Conclusion
In summary, we investigated the (2+1)-dimensional Konopelchenko–Dubrovsky (KD) model and constructed numerous exact closed-form solutions using GERF (generalized exponential rational function) approach with soft symbolic computations via Mathematica. The established soliton solutions exhibit that the KD Eq. (1) admits abundant exact closed-form solutions having arbitrary constant parameters. The findings depict rich dynamical formations of the generated closed-form solutions in the forms of multi-solitons, kink-wave profiles, the interaction of multi-soliton and kink-wave solutions, and periodic solitons in Figs. 1, 2, 3, 4, 5, 6, 7. The obtained solutions will be beneficial in the theory of solitons, nonlinear dynamics, fluid mechanics, applied physics, optic fiber, natural sciences, physics, and many other areas. The technique we have used is one of the powerful techniques for obtaining the exact analytical solutions of NLPDEs as this GERF method constructs an extensive scale of established solitary wave solutions to the associated system. This method is very effective, trustworthy, and efficient. Moreover, the dynamics of KD Eq. (1) is also examined by using the bifurcation analysis in which we have found various equilibrium points, and different types of phase portraits have been discussed, see Figs. 8 and 9. Furthermore, we numerically studied the existence of quasi-periodic solutions for the perturbed model, which is obtained after inserting the periodic forces to the considered KD system (1). Also, 2D and 3D phase portraits shown by Figs. 10, 11, 12 for the perturbed system were also plotted.
Availability of data and material
Data sharing is not applicable to this article as no data sets were created or analyzed in this study.
References
Kumar, H., Malik, A., Chand, F., Mishra, S.C.: Exact solutions of nonlinear diffusion reaction equation with quadratic, cubic and quartic nonlinearities. Indian J. Phys. 86, 819–827 (2012). https://doi.org/10.1007/s12648-012-0126-y
Hirota, R.: The Direct Method in Soliton Theory. Cambridge University Press, Cambridge (2004)
Kumar, S., Mohan, B.: A study of multi-soliton solutions, breather, lumps, and their interactions for kadomtsev–petviashvili equation with variable time coeffcient using hirota method. Phys. Scr. 96(12), 125255 (2021). https://doi.org/10.1088/1402-4896/ac3879
Fu, Z.T., Liu, S.K., Liu, S.D., Zhao, Q.: New Jacobi elliptic function expansion and new periodic solutions of nonlinear wave equations. Phys. Lett. A 290, 72–76 (2001). https://doi.org/10.1016/S0375-9601(01)00644-2
Kudryashov, N.A.: Simplest equation method to look for exact solutions of nonlinear differential equations. Chaos Soliton Fractals 24(5), 1217–1231 (2005). https://doi.org/10.1016/j.chaos.2004.09.109
Malik, A., Chand, F., Kumar, H., Mishra, S.C.: Exact solutions of the Bogoyavlenskii equation using the multiple \((\frac{G^{\prime }}{G})\)-expansion method. Comput. Math. Appl. 64(9), 2850–2859 (2012). https://doi.org/10.1016/j.camwa.2012.04.018
Guan, X., Liu, W., Zhou, Q., Biswas, A.: Darboux transformation and analytic solutions for a generalized super-NLS-mKdV equation. Nonlinear Dyn. 98, 1491–1500 (2019). https://doi.org/10.1007/s11071-019-05275-0
Hu, X.B.: Nonlinear superposition formulae for the differential-difference analogue of the KdV equation and two-dimensional Toda equation. J. Phys. A Math. Gen. 27(1), 201 (1994). https://doi.org/10.1088/0305-4470/27/1/014
Wang, M.L.: Solitary wave solutions for variant Boussinesq equations. Phys. Lett. A 199, 169–172 (1995). https://doi.org/10.1016/0375-9601(95)00092-H
Kumar, S., Kumar, A.: Lie symmetry reductions and group invariant solutions of (2 + 1)-dimensional modified Veronese web equation. Nonlinear Dyn. 98, 1891–1903 (2019). https://doi.org/10.1007/s11071-019-05294-x
Ghanbari, B., Inc, M.: A new generalized exponential rational function method to find exact special solutions for the resonance nonlinear Schrödinger equation. Eur. Phys. J. Plus 133, 142 (2018). https://doi.org/10.1140/epjp/i2018-11984-1
Ghanbari, B., Osman, M.S., Baleanu, D.: Generalized exponential rational function method for extended Zakharov–Kuzetsov equation with conformable derivative. Mod. Phys. Lett. B 34(20), 1950155 (2019). https://doi.org/10.1142/S0217732319501554
Kumar, S., Kumar, A., Wazwaz, A.M.: New exact solitary wave solutions of the strain wave equation in microstructured solids via the generalized exponential rational function method. Eur. Phys. J. Plus 135, 870 (2020). https://doi.org/10.1140/epjp/s13360-020-00883-x
Kumar, S., Almusawa, H., Hamid, I., Abdou, M.A.: Abundant closed-form solutions and solitonic structures to an integrable fifth-order generalized nonlinear evolution equation in plasma physics. Results Phys. 26, 104453 (2021). https://doi.org/10.1016/j.rinp.2021.104453
Konopelchenko, B.G., Dubrovsky, V.G.: Some new integrable nonlinear evolution equations in \(2+1\) dimensions. Phys. Lett. A 102(1–2), 15–17 (1984). https://doi.org/10.1016/0375-9601(84)90442-0
Kumar, S., Hama, A., Biswas, A. (2014) Solutions of Konopelchenko–Dubrovsky equation by traveling wave hypothesis and Lie symmetry approach. Appl. Math. Inf. Sci. 8(4), 1533–1539. https://doi.org/10.12785/amis/080406
Kumar, M., Tiwari, A.K.: On group-invariant solutions of Konopelchenko–Dubrovsky equation by using Lie symmetry approach. Nonlinear Dyn. 94, 475–487 (2018). https://doi.org/10.1007/s11071-018-4372-1
Tian-lan, H.: Bifurcation of traveling wave solutions of (2+1) dimensional Konopelchenko-Dubrovsky equations. Appl. Math. Comput. 204, 773–783 (2008)
Alfalqi, S. H., Alzaidi, J. F., Lu, D., Khater, M.: On exact and approximate solutions of \((2+1)\)-dimensional Konopelchenko-Dubrovsky equation via modified simplest equation and cubic B-spline schemes. Therm. Sci. 231889–1899 (2019). https://doi.org/10.2298/TSCI190131349A
Khater, M.M.A., Lu, D., Attia, R.A.M.: Lump soliton wave solutions for the \((2+1)\)-dimensional Konopelchenko-Dubrovsky equation and KdV equation. Mod. Phys. Lett. B 33(18), 1950199 (2019). https://doi.org/10.1142/S0217984919501999
Ren, B., Cheng, X.P., Lin, J.: The \((2+1)\)-dimensional Konopelchenko-Dubrovsky equation: nonlocal symmetries and interaction solutions. Nonlinear Dyn. 86, 1855–1862 (2016). https://doi.org/10.1007/s11071-016-2998-4
Seadawy, A.R., Yaro, D., Lu, D.: Propagation of nonlinear waves with a weak dispersion via coupled (2+1)-dimensional Konopelchenko–Dubrovsky dynamical equation. Pramana J. Phys. 94, 17 (2020). https://doi.org/10.1007/s12043-019-1879-z
Song, L., Zhang, H.: New exact solutions for the Konopelchenko–Dubrovsky equation using an extended Riccati equation rational expansion method and symbolic computation. Appl. Math. Comput. 187, 1373–1388 (2007)
Jhangeer, A., Hussain, A., Junaid-U-Rehman, M., Baleanu, D., Riaz, M.B.: Quasi-periodic, chaotic and travelling wave structures of modified Gardner equation. Chaos Solitons Fractals 143, 110578 (2021). https://doi.org/10.1016/j.chaos.2020.110578
Hussain, A., Jhangeer, A., Tahir, S., Chu, Y.M., Khan, I., Nisar, K.S.: Dynamical behaviour of fractional Chen-Lee-Liu equation in optical fibers with beta derivatives. Results Phys. 18, 103208 (2020). https://doi.org/10.1016/j.rinp.2020.103208
Chang, L., Liu, H., Xin, X.: Lie symmetry analysis, bifurcations and exact solutions for the (2+1)-dimensional dissipative long wave system. J. Appl. Math. Comput. 64, 807–823 (2020). https://doi.org/10.1007/s12190-020-01381-0
Jhangeer, A., Raza, N., Rezazadeh, H., Seadawy, A.: Nonlinear self-adjointness, conserved quantities, bifurcation analysis and travelling wave solutions of a family of long-wave unstable lubrication model. Pramana J. Phys. 94, 87 (2020). https://doi.org/10.1007/s12043-020-01961-6
Elbrolosy, M.E., Elmandouh, A.A.: Dynamical behaviour of nondissipative double dispersive microstrain wave in the microstructured solids. Eur. Phys. J. Plus 136, 955 (2021). https://doi.org/10.1140/epjp/s13360-021-01957-0
Perko, L.: Differential Equations and Dynamical Systems, Third Edition, Texts in Applied Mathematics, 7. Springer-Verlag, New York (2001)
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflicts of interest
The authors declare that they have no known competing financial interests.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Kumar, S., Mann, N., Kharbanda, H. et al. Dynamical behavior of analytical soliton solutions, bifurcation analysis, and quasi-periodic solution to the (2+1)-dimensional Konopelchenko–Dubrovsky (KD) system. Anal.Math.Phys. 13, 40 (2023). https://doi.org/10.1007/s13324-023-00802-0
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1007/s13324-023-00802-0