
Abstract
To improve the software quality and reduce the maintenance cost, cross-project fault prediction (CPFP) identifies faulty software components in a particular project (aka target project) using the historical fault data of other projects (aka source/reference projects). Although several diverse approaches/models have been proposed in the past, there exists room for improvement in the prediction performance. Further, they did not consider effort-based evaluation metrics (EBEMs), which are important to ensure the model’s application in the industry, undertaking a realistic constraint of having a limited inspection effort. Besides, they validated their respective approaches using a limited number of datasets. Addressing these issues, we propose an improved CPFP model with its validation on a large corpus of data containing 62 datasets in terms of EBEMs (PIM@20%, Cost-effectiveness@20%, and IFA) and other machine learning-based evaluation metrics (MLBEMs) like PF, G-measure, and MCC. The reference data and the target data are first normalized to reduce the distribution divergence between them and then the relevant training data is selected from the reference data using the KNN algorithm. Seeing the experimental and statistical test results, we claim the efficacy of our proposed model over state-of-the-art CPFP models namely the Turhan-Filter and Cruz model comprehensively. Thus, the proposed CPFP model provides an effective solution for predicting faulty software components, enabling practitioners in developing quality software with lesser maintenance cost.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
The size and the complexity of the software are growing exponentially with growing needs and technical challenges, which can lead to faults, causing a substantial loss in terms of money and time. Thus, developing quality software demands a huge investment in terms of time and money (Arar and Ayan 2015). Further, the power of traditional testing approaches can never always be guaranteed (Kassab et al. 2017). Besides, the delayed identification of faults can increase their fixing cost by 100%, if detected after the development phase (Pelayo and Dick 2007). Therefore, it becomes extremely important to identify the faulty software components before the software release, not only to improve its quality but also to reduce its maintenance cost.
Machine learning techniques are becoming extremely popular in predicting faulty software components so that corrective measures should be taken on time to prevent their failures and reduce their maintenance cost (Bowes et al. 2018; D’Ambros et al. 2012; Lessmann et al. 2008; Menzies et al. 2007). However, the success of a machine learning-based technique largely depends on the amount of potential data. Thus, when sufficient within-project historical fault/defect data is available for training and validating the model, we term it within-project fault prediction (WPFP). A good amount of work (Bisi and Goyal 2016; Canfora et al. 2015; Liu et al. 2010; Lu et al. 2012; Wang et al. 2015) has been reported in the existing literature on WPFP, proposing various effective approaches. However, in reality, collecting this fault data is an extremely time-consuming and costly task. Thus, under the situation of building a new software project, for which either no historical fault data is available or a very less amount of data is available, WPFP may not provide an efficient solution. However, several software repositories like PROMISE and NASA contain the historical fault data of various open-source projects, which can be leveraged to construct a fault prediction model for a specific software project (aka target project) facing the scarcity of the within-project training data. Thus, when constructing a fault prediction model for a software project (having either limited or no within-project training data) leveraging the fault data of some other project(s) (aka reference/source project (s)), we term it cross-project fault prediction (CPFP). The reference and the target data may or may not have the same feature space. However, we particularly have focussed on building a CPFP model where both target and the reference data share the same feature space. Even if the target and the reference projects have the same set of features, they may have differences in the distribution of their features.
Due to these differences in their distributions, the machine learning model’s prediction performance deteriorates. This happens because generally machine learning algorithms are based on the rationale of utilizing similar distribution data in their construction and validation phases. Several researchers have proposed different alternative solutions (Chen et al. 2015; Herbold 2013; Kawata et al. 2015; Ma et al. 2012; Nam et al. 2013; Ryu et al. 2017; Turhan et al. 2009) to lessen the distribution difference between the reference project and the target project data, but there still exists room for the improvement in the prediction performance. Further, majority of them considered only standard machine learning-based evaluation metrics (MLBEMs) like recall, precision, G-mean, F-measure, G-measure, balance, AUC (area under the curve), MCC (Mathew’s correlation coefficient), PF (probability of false alarm), etc. to assess their model’s potential. They did not consider the effort-based evaluation metrics (EBEMs) under the practical constraint of limited inspection resources, which accounts for the model’s applicability in a real scenario. Besides, they validated their approaches using a limited number of selected datasets.
Targeting these research gaps, we aim to propose a machine learning-based improved CPFP model, considering its holistic evaluation using EBEMs along with MLBEMs on a large corpus of 62 datasets. Our proposed approach consists of three phases namely the normalization phase, training data selection phase, and model construction phase. In the normalization phase, the reference data and the target data are normalized to lessen the distribution dissimilarity between them. In the training data selection phase, the relevant data is selected from the available reference data leveraging the KNN algorithm. The third phase constitutes building the CPFP model using the selected reference data retrieved from the previous phase, with its validation using the normalized target data retrieved from the first phase. To measure the true performance of the proposed CPFP model, we compare it with state-of-the-art approaches namely, Turhan-Filter (2009) and Cruz model (2009) using 62 datasets from the PROMISE repository.
On the basis of the observed results, the study makes the following contributions to the CPFP literature:
-
1.
We propose an improved machine learning-based CPFP model and validate its performance in terms of EBEMs and MLBEMs under the realistic scenario of a limited inspection effort, using 62 datasets from the PROMISE repository.
-
2.
The proposed model showcases its effectiveness in terms of MLBEMs by satisfying the practitioner’s expectation to balance between the accuracy of both faulty and non-faulty classes over state-of-the-art approaches Turhan-Filter and Cruz model by effectively reducing the distribution gap between the target the reference data.
-
3.
Further, considering the realistic constraint of limited inspection effort, the proposed model justifies its application into practice by better balancing between its cost-effectiveness and the amount of developer’s effort required to investigate the faulty modules due to the effective selection of the training data.
The rest of the paper is arranged as follows: Sect. 2 puts light on the existing literature, and Sect. 3 explains the proposed approach in detail. Further ahead, Sect. 4 describes the datasets, evaluation metrics, research questions, and the experimental design of the proposed approach, whereas Sect. 5 describes the experimental results, its analysis, and the ablation study to investigate the contribution of the normalization phase and the training data selection phase in the final performance of the proposed approach. Next, Sect. 6 presents the validity threats with Sect. 7 summarizing the research work along with the future directions.
2 Related work
To the best of our knowledge, Briand et al. (2002) made the earliest contribution to exploring the feasibility of CPFP. Zimmermann et al. (2009) also attempted to explore the feasibility of CPFP by performing a big-scale experimental study. But the experimental results were disappointing. The prime reason for the unsatisfactory performance of CPFP was the distribution gap in the training and testing data.
Addressing this concern, Watanabe et al. (2008) explored the application of the data standardization technique to lessen the divergence in the reference and the target data distributions. Similarly, Cruz and Ochimizu (2009) attempted to normalize the reference and the target data to minimize the difference in their distributions. Both obtained better results, but it was still not satisfactory. Moreover, they evaluated their respective approaches on limited datasets using MLBEMs only and did not pay any attention to EBEMs.
Further, Turhan et al. (2009) explored a training data selection method, where they selected 10 matching software modules from the reference data for each target data module by applying the KNN algorithm. They achieved improvement in the prediction performance, particularly with respect to recall and PF. Unfortunately, PF was still very high. In addition, the evaluation in terms of EBEMs was not performed.
Working on similar lines, transfer learning was explored by Ma et al. (2012) to bridge the gap across the reference and the target data distributions. The training data were assigned weights using the Data Gravitation method (Peng et al. 2009) and Bayes logic was incorporated to develop the CPFP model. They recorded the improvement with respect to F-measure, PF, and AUC in comparison to conventional CPFP (a CPFP model built directly using the reference data without any processing) and Turhan-Filter (2009). However, the evaluation in terms of EBEMs was not performed.
To further ameliorate the prediction performance, another transfer learning-based technique called TCA+ (transfer component analysis (Pan et al. 2011)) was explored by Nam et al. (2013). They evaluated their model on 8 datasets and witnessed the improvement with respect to the mean F-measure score over conventional CPFP and WPFP.
The above approaches primarily worked towards improving recall. As a result, they observed high PF. A higher false positive rate can ruin the developer’s effort and time. Addressing this issue, Chen et al. (2015) proposed a DTB approach, wherein they first assigned weights to the training data and then constructed an ensemble model by applying the Transfer AdaBoost algorithm, leveraging 10% of the within-project labeled data. They tested their approach on 15 datasets and witnessed its supremacy over compared approaches, particularly with respect to PF, G-measure, and MCC. However, the evaluation in terms of EBEMs was completely ignored.
Similar to the DTB approach, Ryu et al. (2017) came up with another transfer boosting-based approach called TCSBoost, which considered class imbalance and feature distribution to assign weights to the training modules and witnessed improvement in the performance with respect to G-mean and balance. Like previous approaches, they also missed considering the evaluation in terms of EBEMs.
All the above CPFP approaches evaluated their respective models in terms of MLBEMs only and considered only some selected datasets from the openly available pool of datasets.
Further, different approaches used different datasets and diverse evaluation metrics, one cannot specify which technique performed the best comprehensively. Therefore, to find out the best CPFP approach, Herbold et al. (2018) carried out a large empirical study and compared 24 existing CPFP approaches and concluded the Cruz model (2009) and the Turhan Filter (2009) as the top two CPFP approaches.
In an attempt to further improve the prediction performance comprehensively, the study proposes an improved CPFP model inspired by Cruz and Ochimizu (2009), Turhan et al. (2009) with its evaluation on 62 datasets in terms of EBEMs along with MLBEMs and its comparison with the two best state-of-the-art CPFP approaches Cruz model (2009) and the Turhan-Filter (2009).
3 Proposed approach
Figure 1 depicts the framework of the proposed model. It contains three main phases. The very first phase is the normalization phase. Following the Cruz approach (2009), we first normalize the reference data and the target data to narrow the distribution gap between them. But different from the Cruz approach which used only a single project data for training, we use multiple project data in the training phase and consider the median of the target data as the reference point to normalize the reference and the target data. Kindly note that the reference data contains the data of all available projects except the target data and its related version data. After normalization, our second phase starts, which basically works on filtering the relevant data from the available reference data. In particular, we eliminate the irrelevant software modules from the reference data by selecting the 10 nearest software modules from the reference data, for each software module in the target data. This phase helps us in selecting the reference data which is similar to the target data. Further ahead, the third phase constitutes the construction of a CPFP model using the reference data retrieved from the second phase with its validation on the normalized target data.

Proposed CPFP model’s framework
To have a better understanding of the model proposed, we also have presented the flow of model building through a flowchart as shown in Fig. 2.

Proposed model’s building steps
3.1 Normalization phase
As shown in Fig. 2, this phase mainly works towards decreasing the gap between the reference and the target data distributions. Following the Cruz approach (2009), we normalized both the reference as well as the target data. But they used the data of only one project for training and considered the median of that data as the reference point. Different from them, our reference data contains multiple project data, therefore as a reference point, we considered the median of the target data. In other words, we used log transformation and the median of the target data as the reference point to normalize the reference and the target data using the following equation.
where \(M_{i}^{^{\prime}}\) shows the normalized value of the \(i^{th}\) metric \(M_{i }\) and \(M_{i}^{T}\) represents the same \(i^{th}\) metric from the target data.
3.2 Training data selection phase
This phase worked on selecting the reference data matching with the target data. For each target data module, 10 nearest modules (considering the Euclidean distance) were selected from the reference data by applying the KNN algorithm (Cover and Hart 1967). The selected data was then searched for any duplicate modules. If found, they were then deleted from the selected reference data.
3.3 Model construction phase
The third phase worked on building the CPFP model using the reference data retrieved from the previous phase. We used Naïve Bayes (NB) as the underlying machine learning classifier for our proposed CPFP model. This is because NB has proved its potential in many previous studies in comparison to other machine learning models (Chen et al. 2015; He et al. 2015; Lessmann et al. 2008; Menzies et al. 2007; Ryu et al. 2017) and is used the most across existing CPFP studies (Hosseini et al. 2019; Khatri and Singh 2021). Next, we validated its potential using the normalized target data and calculated the MLBEMs and EBEMs. Kindly note that the detailed explanation of these evaluation metrics and the process of their calculation is explained in Sect. 4.2.
4 Datasets, performance measures and experimental design
This section describes the datasets, evaluation metrics, research question, baseline selection and experimental design of the proposed approach.
4.1 Datasets
For evaluating the potential of our proposed approach, 62 fault datasets from the PROMISE repository are utilized. These datasets consist of 15 closed-source project datasets and 47 versions of 17 open-source project datasets. These datasets were collected by Jureczko and Madeyski (2010). Each dataset consists of 20 static code metrics and the fault count. These software metrics represent the features of the dataset and the fault count represents the fault-proneness of the software module. A fault count with ‘0’ value depicts a non-faulty module, whereas a fault count greater than or equal to 1 shows a faulty module. Table 1 shows the detailed characteristics of these datasets. The first, second, and the third columns represent the short notation, name, and description of each dataset respectively. The fourth and the fifth columns depict the module count and the percentage of faulty modules in each dataset respectively.
We particularly selected a large pool of these datasets including both open-source and closed-source projects to counter the limitation of the many existing studies (Chen et al. 2015; Cruz and Ochimizu 2009; Ma et al. 2012; Nam et al. 2013; Ryu et al. 2017; Watanabe et al. 2008) as they used very limited datasets, which mainly consisted of open-source project datasets. Further, these datasets cover both small to large software projects containing modules ranging from 10 to 965 with fault rates varying from 2.24 to 92.19. A detailed description of various features of these datasets can be found in (Jureczko and Madeyski 2010).
4.2 Evaluation metrics
To holistically assess the performance of our approach, we used EBEMs along with MLBEMs considering the realistic constraint of limited inspection effort. Typical MLBEMs like recall, precision, F-measure, AUC, etc. do not deliver much to practitioners in assessing the strength of a fault prediction model comprehensively. The model’s cost-effectiveness and the amount of effort testers/developers have to put in investigating faulty modules, are also important measures that need to be considered while evaluating any fault prediction model (Khatri and Singh 2021; Zhou et al. 2018) considering the constraint of limited inspection effort.
According to previous studies (Ostrand et al. 2005; Zhou et al. 2018), we considered that the inspection effort equal to 20% of TLOC (total lines of code) in the target data, is available at our disposal, taking lines of code (LOC) as the proxy for inspection effort.
4.2.1 MLBEMs
For holistic evaluation of our approach, we used three MLBEMs (G-measure, PF, and MCC). We specifically used G-measure and MCC to have a balanced performance for both fault-free and fault-prone classes. Thus, the accuracy of both classes is important (Ryu et al. 2017), therefore we considered G-measure and MCC. In particular, G-measure balances between recall and PF, whereas MCC considers all positive and negative predictions to calculate a composite score, which ranges between − 1 and 1. An MCC score of 1 represents the supreme performance, however, an MCC score of − 1 shows the lowest performance. Further, we considered PF seeing its impact on the developer/tester’s performance as high false positives lead to huge wastage of their effort and time and reduce their daily efficiency. Therefore, the lower the score, the superior the model.
These measures have been widely used in many other CPFP studies (Chen et al. 2015; Zhou et al. 2018) and can be calculated as follows:
Here, TP and TN denote the count of correct predictions of faulty and non-faulty classes respectively. On the other hand, FP and FN represent the count of false predictions of non-faulty and faulty classes respectively.
4.2.2 EBEMs
In reality, these MLBEMs just measure the correctness of the predictions but didn’t provide enough information about the model’s practical application. Since we have a limited inspection effort, therefore only a few faulty modules can go under inspection for locating fault positions and their corrections. To quantify the tester/developer’s effort investment while inspecting these faulty modules and to measure the cost-effectiveness under the limited inspection effort of 20% of TLOC, we considered three EBEMs namely PIM@20%, Cost-effectiveness@20%, and IFA.
For better understanding, let’s assume that there were ‘P’ modules in the target data, out of which ‘D’ modules were faulty. Further assume that ‘p’ modules were inspected under 20% of TLOC, out of which ‘d’ modules were faulty. Besides, consider that ‘T’ modules were investigated prior to noticing the first truly classified faulty module.
PIM@20% (Meyer et al. 2014) specifies the proportion of inspected modules under the 20% of TLOC and is computed as follows:
This measure accounts for the additional effort on testers/developers when they have to inspect more modules within the same inspection effort as they may need to switch between various files and require communication and coordination with people of different expertise. So, the lesser the score, the better the model.
Cost-effectiveness@20% (Huang et al. 2018) accounts for the actual performance of the model. It measures the proportion of faulty modules inspected under 20% of TLOC and can be calculated as follows:
The higher the score, the better the model.
IFA (initial false alarm) (Kochhar et al. 2016) measures the initial false predictions before encountering the first correctly classified faulty module. This measure is particularly considered in the study as it strongly impacts the developer/tester's performance. A high IFA can shake their confidence in the model’s capacity, causing fatigue and disappointment among them with a reduction in their work efficiency. Therefore, the lesser the score, the superior the performance of the model. It is computed as follows:
4.3 Research question and baseline selection
This section presents the research question and baselines selection.
To measure the true strength of the proposed model, we undertook the following research question:
Research Question Can the proposed approach surpass the Turhan-Filter (Turhan et al. 2009) and Cruz model (Cruz and Ochimizu 2009) comprehensively?
To answer this question, we performed several experiments taking 62 datasets, the result of which is presented in Sect. 5.1. We particularly selected these two state-of-the-art approaches namely Turhan-Filter (2009) and Cruz model (2009) for comparison as Herbold et al. (2018) confirmed these two approaches at the top in their large-scale comparative study amongst 24 existing approaches.
4.4 Experimental design
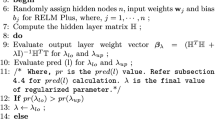
Algorithm 1 explains the experimental design of our proposed approach and Algorithm 2 explains the EBEMs computation process.

First of all, we constructed the reference data for every target data by eliminating the target data and its related versions (if any) from the available pool of data (step 2.1). Next, we removed the modules having zero LOC from the target and the reference data as such modules did not contain any information for the fault (step 2.2). Next, we normalized the reference and the target data (steps 2.3 and 2.4) and then selected the matching reference data for each target data by applying the KNN algorithm (step 2.5). After training data selection, the proposed model was constructed and validated and the various MLEBMs were calculated (steps 2.6 to 2.8). Next, the EBEMs were calculated by applying Algorithm 2 (step 2.9). In the end, the median results were reported over all the target projects (step 3).

Now, we explain the process of EBEMs computation as shown in Algorithm 2, which was designed following (Khatri and Singh 2022). First, three lists were constructed namely L1_faulty, L2_Non-faulty, and L3_inspection. All the faulty predicted modules were added in L1_faulty and all non-faulty predicted modules were added in L2_Non-faulty. Next, the risk_score was calculated for every target data module according to step 2.2. This risk_score took three inputs namely the probability score produced by the model, the average cyclomatic complexity (avg_cc), and the LOC. Both the probability score and the cyclomatic complexity represent the proxies for the module’s fault proneness and the third input i.e., LOC represent the proxy for the inspection effort. The higher the probability score and the cyclomatic complexity, the more the fault-proneness. The more the LOC, the higher the inspection effort. Therefore, we designed our risk_score such that the modules with higher fault-proneness, having low inspection effort must be investigated first.
Keeping this rationale in mind, the two lists were then arranged in descending order of their risk_score. After that, the list L2_Non-faulty was appended at the bottom of the list L1_faulty. Next, we extracted some topmost modules from L1_faulty, with their TLOC equal to the given inspection effort, and added them to the list L3_Inspection. Based on this list, the EBEMs were then calculated according to step 6.
5 Results and discussions
This section discusses the results, its analysis, and the ablation study to examine the contribution of each phase in the overall performance of the proposed CPFP model.
5.1 Results
Table 2 depicts the result of the comparison of our proposed model with the Turhan-Filter and Cruz model in terms of G-measure, PF, MCC, PIM@20%, Cost-effectiveness@20%, and IFA scores over 62 datasets. Further ahead, Table 3 summarizes the results by taking their medians for all compared models. We use median results to eradicate the effect of outliers as they can mislead the results.
While comparing to Turhan-Filter, our model dominated in all MLBEMs with an improvement of 3.36%, 80.87%, and 10.15%, concerning median G-measure, median PF, and median MCC scores respectively. Further, concerning EBEMs, our proposed model showed its superiority with respect to PIM@20% and IFA with an improvement of 52.24% and 100% in their respective median scores. However, the performance with respect to Cost-effectiveness@20% was a little low.
Next, while comparing with the Cruz model, our model showed its excellence with respect to G-measure and MCC with similar performance concerning PF. In particular, our proposed model achieved an improvement of approximately 7% and 11% in median G-measure and median MCC scores respectively. Further, with respect to median cost-effectiveness@20%, it showed an improvement of 14.35% with similar performance in other metrics namely PIM@20% and IFA.
We further applied a statistical test to compare our proposed approach with Turhan-Filter and Cruz model statistically. In particular, we applied the Wilcoxon-Signed Rank test (Demšar 2006) at a 5% significance level for statistical comparison. Being a non-parametric test, it compares two related samples to verify their belongingness to the same population. The resulting p-value score of more than or equal to 0.05 reveals that the two compared samples do not differ statistically. However, the p-value score of less than 0.05 reveals that the two compared samples differ statistically. Table 4 depicts the statistical test results.
The results of the statistical test also revealed the supremacy of our proposed approach over the Turhan-Filter concerning PF, PIM@20%, and IFA as the p-values were less than 0.05. The two compared approaches performed comparably to each other with respect to G-measure and MCC (as p-values > 0.05). However, with respect to Cost-effectiveness@20%, the performance was a little low as compared to Turhan-Filter.
Further, these results also confirmed the excellence of our proposed approach over the Cruz model particularly with regard to G-measure as the p-value was less than 0.05 with comparable performance with respect to other metrics. However, we observed an improvement of approximately 11% and 14.35% in terms of median MCC and median Cost-effectiveness@20% scores respectively over the Cruz model.
5.2 Discussions
To analyse our results concretely, we make use of boxplots to pictorially represent the distribution of various evaluation metrics obtained from our proposed model, the Turhan-Filter and Cruz model over all the 62 datasets as shown in Fig. 3. The lower black horizontal line of each box shows the first quartile, the center black line shows the median (i.e., 2nd quartile) and the upper black horizontal line of the box shows the 3rd quartile. The lowermost black horizontal line and the uppermost black horizontal line depict the minimum and maximum values of the distribution.

Boxplots of MLBEMs and EBEMs
From Fig. 3a, we conclude the superiority of our model in comparison to Cruz model with similar performance to Turhan-Filter in terms of G-measure. Next, from Fig. 3b, we observed the similar performance of all three models in terms of MCC. Further, Fig. 3c revealed the outstanding performance of our proposed model and the Cruz model in comparison to Turhan-Filter concerning PF. However, with respect to PF, our proposed model and the Cruz model performed comparable to each other. Similarly, with respect to PIM@20%, the Cruz model and our proposed model performed comparably to each other as evident in Fig. 3d. However, in comparison to Turhan-Filter, both performed much better. Further as visible in Fig. 3e, our model performed better than the Cruz model, but Turhan-Filter outperformed both in terms of Cost-effectiveness@20%. In particular, Turhan-Filter achieved the best performance with respect to Cost-effectiveness@20% at the cost of PIM@20%. Because the proportion of inspected modules happened to be very large in the case of Turhan-Filter, therefore it succeeded in inspecting more faulty modules, putting a huge additional effort on developers/testers. Further, with respect to IFA, Turhan-Filter performed the worst as evident in Fig. 3f, whereas the Cruz model and our model performed comparably to each other. Thus, combining all evaluation metrics, we claimed the dominance of our proposed model in comparison to Turhan-Filter and the Cruz model.
5.3 Ablation study
To witness the impact of each and every phase on the model’s performance, we performed an ablation study. In particular, first we measured the model’s performance before the first phase of normalization, i.e., taking the data as it is, i.e., without applying any normalization technique. After that, we captured the model’s performance after applying the first phase of normalization to particularly investigate the impact of this phase on the model’s performance. Next, we measured the performance after applying our second phase of training data selection in sequence after the first phase to examine the impact of this phase on the model’s performance. Figure 4 shows the performance of the proposed CPFP model in terms of median G-measure, PF, MCC, PIM@20%, Cost-effectiveness@20% and IFA scores, calculated over 62 CPFP experiments, before the normalization phase, after the first phase of normalization and second phase of training data selection respectively.

Impact of different phases on the proposed model’s performance
It is evident from the above figure that the normalization phase brought substantial improvement in the proposed model’s prediction performance. In other words, in terms of MLBEMs, the normalization phase improved the median G-measure and MCC scores by approximately 61% and 32% respectively with a slight surge in the PF score. Since both faulty and non-faulty classes are important, therefore giving equal weightage to the accuracy of both classes, the normalization phase achieved improvement in the overall performance in terms of MLBEMs by showcasing better performance in two compound evaluation metrics i.e., G-measure and MCC. Further, in terms of EBEMs, the normalization phase brought improvement in Cost-effectiveness@20% with a slight surge in PIM@20%. However, the performance in terms of IFA remained the same. In other words, the performance in terms of EBEMs more or less remained the same after the normalization phase. But combining all MLBEMs and EBEMs, the performance of the proposed CPFP model significantly improved after the application of the first phase of normalization.
Further ahead, the application of second phase of training data selection after the first phase further improved the proposed model’s performance by achieving an improvement of approximately 7% and 12% in median G-measure and MCC scores respectively with comparable performance in terms of median PF score. Furthermore, in terms of EBEMs, it witnessed an improvement of approximately 15% in median Cost-effectiveness@20% score with comparable performance in terms of median PIM@20% and IFA scores.
Thus, the above ablation study showcased the impact of normalization phase and training data selection phase on the proposed model’s performance. Both phases improved the overall performance (i.e., combining MLBEMs and EBEMs) and thus contributed significantly to justify the effectiveness of the proposed CPFP model.
6 Threats to validity
Some of the significant issues that can pose threats to our proposed work are mentioned as follows:
6.1 Internal validity
To examine the strength of our proposed model, we have used a large corpus of 62 datasets, wherein each dataset contains object-oriented, complexity-based, and size-based software metrics as the potential fault predictors. These software metrics have already proven their importance as potential fault predictors in many SFP studies (Basili et al. 1996; Jureczko and Spinellis 2010; Subramanyam and Krishnan 2003). However, we cannot assure the same performance of our model on projects containing other software metrics.
6.2 External validity
This threat relates to validating the effectiveness of the proposed work on other software projects from different domains, developed under diverse operating procedures and principles. However, to minimize this threat to some extent, we have validated the performance of our approach on 62 datasets, consisting of a good mix of both open and closed-source projects belonging to different domains.
7 Conclusion
This study aims at building quality software with lesser maintenance cost using an improved cross-project fault prediction (CPFP) model. The proposed model consisted of three phases. The first phase normalized the reference and the target data, the second phase selected the relevant training data by applying the KNN algorithm and the third phase finally constructed the CPFP model. To assess the strength of the proposed model comprehensively, the effort-based evaluation metrics (EBEMs) along with MLBEMs (machine learning-based evaluation metrics) were considered, taking the realistic constraint of limited inspection effort. Based on the large-scale empirical investigation on 62 datasets, the excellence of the proposed model over state-of-the-art models namely the Turhan-Filter and the Cruz model was concluded. In the future, we will work on further improving its performance by building hybrid models combining normalization, instance selection and feature selection with its validation on more datasets.
References
Arar ÖF, Ayan K (2015) Software defect prediction using cost-sensitive neural network. Appl Soft Comput 33:263–277. https://doi.org/10.1016/J.ASOC.2015.04.045
Basili VR, Briand LC, Melo WL (1996) A validation of object-oriented design metrics as quality indicators. IEEE Trans Software Eng 22(10):751–761. https://doi.org/10.1109/32.544352
Bisi M, Goyal NK (2016) An ANN-PSO-based model to predict fault-prone modules in software. Int J Reliab Saf 10(3):243–264. https://doi.org/10.1504/IJRS.2016.081611
Bowes D, Hall T, Petrić J (2018) Software defect prediction: do different classifiers find the same defects? Softw Qual J 26(2):525–552. https://doi.org/10.1007/s11219-016-9353-3
Briand LC, Melo WL, Wüst J (2002) Assessing the applicability of fault-proneness models across object-oriented software projects. IEEE Trans Softw Eng 28(7):706–720. https://doi.org/10.1109/TSE.2002.1019484
Canfora G, Lucia AD, Penta MD, Oliveto R, Panichella A, Panichella S (2015) Defect prediction as a multiobjective optimization problem. Softw Test Verif Reliab 25(4):426–459. https://doi.org/10.1002/STVR.1570
Chen L, Fang B, Shang Z, Tang Y (2015) Negative samples reduction in cross-company software defects prediction. Inf Softw Technol 62(1):67–77. https://doi.org/10.1016/j.infsof.2015.01.014
Cover TM, Hart PE (1967) Nearest neighbor pattern classification. IEEE Trans Inf Theory 13(1):21–27. https://doi.org/10.1109/TIT.1967.1053964
Cruz AEC, Ochimizu K (2009) Towards logistic regression models for predicting fault-prone code across software projects. In: 2009 3rd International symposium on empirical software engineering and measurement, pp 460–463. https://doi.org/10.1109/ESEM.2009.5316002
D’Ambros M, Lanza M, Robbes R (2012) Evaluating defect prediction approaches: a benchmark and an extensive comparison. Empir Softw Eng 17(4–5):531–577. https://doi.org/10.1007/s10664-011-9173-9
Demšar J (2006) Statistical comparisons of classifiers over multiple data sets. J Mach Learn Res 7:1–30
He P, Li B, Liu X, Chen J, Ma Y (2015) An empirical study on software defect prediction with a simplified metric set. Inf Softw Technol 59:170–190. https://doi.org/10.1016/j.infsof.2014.11.006
Herbold S, Trautsch A, Grabowski J (2018) A comparative study to benchmark cross-project defect prediction approaches. IEEE Trans Softw Eng 44(9):811–833. https://doi.org/10.1109/TSE.2017.2724538
Herbold S (2013) Training data selection for cross-project defect prediction. In: ACM international conference proceeding series, Part F1288, pp 1–10. https://doi.org/10.1145/2499393.2499397
Hosseini S, Turhan B, Gunarathna D (2019) A systematic literature review and meta-analysis on cross project defect prediction. IEEE Trans Softw Eng 45(2):111–147. https://doi.org/10.1109/TSE.2017.2770124
Huang Q, Xia X, Lo D (2018) Revisiting supervised and unsupervised models for effort-aware just-in-time defect prediction. Empir Softw Eng 24(5):2823–2862. https://doi.org/10.1007/s10664-018-9661-2
Jureczko M, Madeyski L (2010) Towards identifying software project clusters with regard to defect prediction. In: ACM international conference proceeding series, pp 1–10. https://doi.org/10.1145/1868328.1868342
Jureczko M, Spinellis D (2010) Using object-oriented design metrics to predict software defects. In: Models and methods of system dependability. Oficyna Wydawnicza Politechniki Wrocławskiej, pp 69–81. http://citeseerx.ist.psu.edu/viewdoc/summary?doi=10.1.1.226.2285
Kassab M, Defranco JF, Laplante PA (2017) Software testing: the state of the practice. IEEE Softw 34(5):46–52. https://doi.org/10.1109/MS.2017.3571582
Kawata K, Amasaki S, Yokogawa T (2015) Improving relevancy filter methods for cross-project defect prediction. In: Proceedings—3rd international conference on applied computing and information technology and 2nd international conference on computational science and intelligence, ACIT-CSI 2015, pp 2–7. https://doi.org/10.1109/ACIT-CSI.2015.104
Khatri Y, Singh SK (2021) Cross project defect prediction: a comprehensive survey with its SWOT analysis. Innov Syst Softw Eng. https://doi.org/10.1007/s11334-020-00380-5
Khatri Y, Singh SK (2022) Towards building a pragmatic cross-project defect prediction model combining non-effort based and effort-based performance measures for a balanced evaluation. Inf Softw Technol 150:106980. https://doi.org/10.1016/J.INFSOF.2022.106980
Kochhar PS, Xia X, Lo D, Li S (2016) Practitioners’ expectations on automated fault localization. In: Proceedings of the 25th international symposium on software testing and analysis, pp 165–176. https://doi.org/10.1145/2931037.2931051
Lessmann S, Baesens B, Mues C, Pietsch S (2008) Benchmarking classification models for software defect prediction: a proposed framework and novel findings. IEEE Trans Softw Eng 34(4):485–496. https://doi.org/10.1109/TSE.2008.35
Liu Y, Khoshgoftaar TM, Seliya N (2010) Evolutionary optimization of software quality modeling with multiple repositories. IEEE Trans Softw Eng 36(6):852–864. https://doi.org/10.1109/TSE.2010.51
Lu H, Cukic B, Culp M (2012) Software defect prediction using semi-supervised learning with dimension reduction. In: 2012 27th IEEE/ACM international conference on automated software engineering, ASE 2012 —Proceedings, pp 314–317. https://doi.org/10.1145/2351676.2351734
Ma Y, Luo G, Zeng X, Chen A (2012) Transfer learning for cross-company software defect prediction. Inf Softw Technol 54(3):248–256. https://doi.org/10.1016/j.infsof.2011.09.007
Menzies T, Greenwald J, Frank A (2007) Data mining static code attributes to learn defect predictors. IEEE Trans Softw Eng 33(1):2–13. https://doi.org/10.1109/TSE.2007.256941
Meyer AN, Fritz T, Murphy GC, Zimmermann T (2014) Software developers’ perceptions of productivity. In: Proceedings of the ACM SIGSOFT symposium on the foundations of software engineering, 16–21 November, pp 19–29. https://doi.org/10.1145/2635868.2635892
Nam J, Pan SJ, Kim S (2013) Transfer defect learning. In: Proceedings—international conference on software engineering, pp 382–391. https://doi.org/10.1109/ICSE.2013.6606584
Ostrand TJ, Weyuker EJ, Bell RM (2005) Predicting the location and number of faults in large software systems. IEEE Trans Softw Eng 31(4):340–355. https://doi.org/10.1109/TSE.2005.49
Pan SJ, Tsang IW, Kwok JT, Yang Q (2011) Domain adaptation via transfer component analysis. IEEE Trans Neural Netw 22(2):199–210. https://doi.org/10.1109/TNN.2010.2091281
Pelayo L, Dick S (2007) Applying novel resampling strategies to software defect prediction. In: Annual conference of the north American fuzzy information processing society—NAFIPS, pp 69–72. https://doi.org/10.1109/NAFIPS.2007.383813
Peng L, Yang B, Chen Y, Abraham A (2009) Data gravitation based classification. Inf Sci 179(6):809–819. https://doi.org/10.1016/j.ins.2008.11.007
Ryu D, Jang JI, Baik J (2017) A transfer cost-sensitive boosting approach for cross-project defect prediction. Softw Qual J 25(1):235–272. https://doi.org/10.1007/s11219-015-9287-1
Subramanyam R, Krishnan MS (2003) Empirical analysis of CK metrics for object-oriented design complexity: implications for software defects. IEEE Trans Softw Eng 29(4):297–310. https://doi.org/10.1109/TSE.2003.1191795
Turhan B, Menzies T, Bener AB, Di Stefano J (2009) On the relative value of cross-company and within-company data for defect prediction. Empir Softw Eng 14:540–578. https://doi.org/10.1007/s10664-008-9103-7
Wang T, Zhang Z, Jing X, Zhang L (2015) Multiple kernel ensemble learning for software defect prediction. Autom Softw Eng 23(4):569–590. https://doi.org/10.1007/S10515-015-0179-1
Watanabe S, Kaiya H, Kaijiri K (2008) Adapting a fault prediction model to allow inter language reuse. In: Proceedings—international conference on software engineering, pp 19–24. https://doi.org/10.1145/1370788.1370794
Zhou Y, Yang Y, Lu H, Chen L, Li Y, Zhao Y, Qian J, Xu B (2018) How far we have progressed in the journey? An examination of cross-project defect prediction. ACM Trans Softw Eng Methodol 27(1):1–51. https://doi.org/10.1145/3183339
Zimmermann T, Nagappan N, Gall H, Giger E, Murphy B (2009) Cross-project defect prediction: a large scale experiment on data vs. domain vs. process. In: ESEC-FSE’09—Proceedings of the joint 12th European software engineering conference and 17th ACM SIGSOFT symposium on the foundations of software engineering, pp 91–100. https://doi.org/10.1145/1595696.1595713
Funding
No funds, grants, or other support was received.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors have no relevant financial or non-financial interests to disclose.
Human and/or animals participants
This study doesn’t involve any human/animal participants.
Informed consent
This study does not involve any human/animal participants, as a result no consent is needed.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Khatri, Y., Singh, S.K. Predictive software maintenance utilizing cross-project data. Int J Syst Assur Eng Manag 15, 1503–1518 (2024). https://doi.org/10.1007/s13198-023-01957-6
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s13198-023-01957-6