
Abstract
An increase in the share of distributed generation (DG) in the global generation system is a direct indication of the development of available technologies. The extraction of natural energy resources and their use as DG has several advantages, such as the reduction in line losses, improved voltage profile and reliability, etc., but the incorrect installation of these power plants can also have some negative effects. The innovation in technology has motivated to extract the maximum benefit of natural energy resources. Due to this, the capacity and location of these energy resources should be carefully identified. The optimal placement of a distributed generation power plant, in the existing network, is analyzed in this article. The proposed methodology is inspired by the human immune system. In this methodology clonal selection principle of immune system is combined with particle swarm optimization. For checking the validity of the proposed method two test systems, IEEE 33-node radial distribution system and IEEE 14-node loop distribution system, are considered. Results show the validity of the proposed algorithm in radial as well as in loop distribution system.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Although the power generation capacity has increased worldwide, but its growth rate is not in the proportion of the power demand. This creates unbalance in the generation and demand. This unbalance can be compensated by installation of additional alternate power generators. These generators will assist the conventional centralized generating units and can be installed near the load centers. Power generating plants, which are smaller in size than centralized power plants and located near the load centers are known as distributed generation power plants (DGPP). DGPP can be connected at any point of the system. Connection of DGPP in existing power system may have positive and negative impacts on distribution system. Technologies used for DGPP and impacts of the DGPP on existing power system are discussed in details in Adefarati and Bansal (2016), Bhadoria et al. (2016), Theo et al. (2017).
Integration of DGPP in existing system will convert it into an active power system. Due to this power flow will be bidirectional. This may also cause overvoltage, reverse power flow and failure of protective devices (Bhadoria et al. 2013). Impacts of DGPP will depend on its penetration level in existing distribution system. For extracting maximum benefits of the DGPP, its optimal capacity should be installed. Another issue with integration of DGPP is selection of its location in distribution system. In general, a DGPP can be installed in the areas having less reliability and poor voltage profile, but this installation may not be the optimum and may results in adverse effects. Therefore, a power system planner has to select the best suitable location for DGPP within the available set of the locations. Capacity of DGPP also affects the performance of the distribution system. Consequently, a suitable approach must be adopted to choose the best suitable capacity and location of DGPP.
Several techniques are discussed in literature to find the optimal size and location. Objectives of these techniques are diversified as, enhancement of voltage profile, minimization of power and/or energy losses, maximization of benefit, minimization of size, etc. According to Prakash and Khatod (2016) these optimization methods can be classified as:
-
a.
Analytical Techniques
-
b.
Classical Optimization Techniques
-
c.
Artificial Intelligent (Meta-heuristic) Techniques
-
d.
Miscellaneous Techniques
-
e.
Other Techniques for Future Use
Hung et al. (2010) has used analytical expressions for determination of optimal capacity and operating power factor for different types of dispersed generators, with objective of minimization of losses. An improved analytical method was suggested by Hung and Mithulananthan (2013) for optimal size and location of multiple DGPP’s for minimization of losses. Analytical method based on branch power losses, branch current losses and total power losses, with minimization of energy losses, was used by Hung et al. (2013), for the selection of optimum location, size and power factor of the DGPP in radial distribution system. Optimum location of fixed size DGPP was selected by analytical technique, for minimization of losses and improvement of voltage profile (Bhadoria et al. 2014). A multi-objective index was optimized by Hung et al. (2014) using benefit–cost–analysis for the determination of optimal capacity, place and number of DGPP’s. For optimization, a multi-objective index was used. Index includes components of both the active and reactive losses. The optimization of the active loss component results in loss reduction and that of the reactive loss component results in improvement of voltage profile. An analytical technique for size and location optimization, with single and multiple DGPP, for minimization of branch current losses, is proposed in Viral and Khatod (2015). Application of analytical technique in determination of optimal size and location of DGPP (Bhadoria et al. 2017) and optimal placement of capacitor (Bhadoria et al. 2018), is also demonstrated. Effect of optimal placement of DGPP and capacitor on system reliability is also shown.
Mixed Integer Nonlinear Programming (MINLP) (Atwa and El-Saadany 2011) was implemented for optimal deployment of single wind power generator for, minimization of total annual energy losses. Generation-load model is used for determination of optimal place of wind generator. A bi-objective function, to reduce network losses and improve voltage stability, was optimized using dynamic programming in Esmaili et al. (2014). Genetic algorithm (GA) was used for multi-objective optimization for optimal placement of different types of DGPPs considering different load models (Singh et al. 2016). A bi-objective function was optimized using adaptive GA, with the consideration of the uncertainties in generation and load demands (Ganguly and Samajpati 2015). Muttaqi et al. (2016), cost related indices have been maximized using particle swarm optimization (PSO). These indices vary as per the size and location of DGPP. GA in combination of PSO (Moradi and Abedini 2012) was used for optimal sitting and sizing of DGPP in radial distribution system. PSO has been found useful in multi-objective optimization for size, place and generated power contract prices of DGPP (Ameli et al. 2014). Economic analysis was done from distribution companies and DGPP owner’s view point. Hien et al. (2013) has also used PSO in optimal placement of DGPP, for the improvement of voltage stability and minimization of reactive losses. PSO was also used in optimal placement of UPFC in radial distribution system (Jaiswal and Shrivastava 2018). Adaptive quantum inspired evolutionary algorithm (AQiEA) is also found in literature for optimal placement of DG (Manikanta et al. 2016) and simultaneous placement of DG and capacitor both (Manikanta et al. 2018).
Several heuristic and hybrid optimization techniques, such as cuckoo search (Nguyen et al. 2016), invasive weed optimization (IWO) (Rama Prabha and Jayabarathi 2016), kill herd algorithm (Sultana and Roy 2016), hybrid particle artificial bee colony (PABC)-harmony search algorithm (HSA) (Muthukumar and Jayalalitha 2016), multi-objective hybrid big bang-big crunch (MOHBB-BC) (Esmaeili et al. 2016), ANT lion optimizer (ALO) (Hadidian-Moghaddam et al. 2017) and Clonal Selection Algorithm (CSA) (Lalitha et al. 2011) were also found in the literature.
The objectives of the optimum placement of DGPP’s are observed as the minimization of losses, improvement in the voltage stability or profile, minimization of energy losses, minimization of generation or overall cost. These objectives can be used as a single or combined together to form a multi-objective function. Most of the techniques discussed in the literature consider either the minimization of real losses or the improvement in the voltage profile for reduction of total losses but not both. Also, the reactive losses must be considered for optimization as these play a significant role in improvement of the overall system performance. Hence, in this paper a multi-objective function is formed. This multi-objective function considers not only the active losses but the reactive losses and the voltage profile also for optimization. The results obtained from the proposed method are compared with various other methods such as Improved Analytical (IA) (Hung and Mithulananthan 2013), Exhaustive Load Flow (ELF) (Hung and Mithulananthan 2013), PSO (Hien et al. 2013), loss sensitive factor (LSF) (Muthukumar and Jayalalitha 2016), hybrid algorithm (Muthukumar and Jayalalitha 2016) and CSA (Lalitha et al. 2011).
In this paper an artificial immune system based approach is combined with PSO and this hybrid method is used for the optimal placement of DGPP in radial distribution system. CSA available in the literature (Lalitha et al. 2011) selects all solutions for cloning and numerous clones are produced for each solution. In the proposed technique, only optimal solution is cloned for better and faster optimization process. In previous CSA, Lalitha et al. (2011) objective function is to minimize active losses only in radial distribution system, but in this paper, objective function is to minimize total losses and improve voltage profile of the radial as well as loop distribution system. Test systems considered are IEEE 33-node and IEEE 14-node distribution systems. Main objectives of article are:
-
1.
To develop an efficient technique by combining features of AIS with PSO
-
2.
To formulate a multi-objective function for minimization of total losses and voltage profile improvement
-
3.
To optimize the capacity and location of DGPP by means of proposed technique in radial as well as loop distribution system
2 Problem formulation
In general, power is generated through centralized power plants and location of these power plants is far away from the point of use. This distance is main cause of the voltage drop and power losses in the system. The effect of distance will be more prominent in radial distribution systems. One more reason for the poor voltage profile and increased losses is the inductive nature of the load. This inductive nature of load, worsen the power factor, which in turn affects the losses and voltage profile of the system.
Line losses of the system are mainly dependent on the current flow in the lines. For a two terminal system the line current between terminal i and j is given by:
where \(I_{ij}\) = phasor current from terminal i to j, \(V_{i}\) = the voltage of terminal i, \(V_{j}\) = the voltage of terminal j, and \(Y_{ij}\) is the element of the Y-bus matrix.
With the help of this injected current line power flow and the total losses of any system can be calculated as follows: Line power flow from terminal
In the same way line power flow from terminal
Thus, total line losses in N-node system
The total power losses (PT) of a system can also be given in terms of real and reactive injected powers at different nodes.
2.1 Active power loss index (APLI)
In any N-node system active power loss can be expressed by the ‘exact loss’ formula (Elgerd 1982) as written in Eq. (5).
where \(\alpha_{ij} = \frac{{R_{ij} }}{{V_{i} V_{j} }}cos\left( {\delta_{i} - \delta_{j} } \right)\), \(\beta_{ij} = \frac{{R_{ij} }}{{V_{i} V_{j} }}sin\left( {\delta_{i} - \delta_{j} } \right)\), N = total number of nodes, Pi and Qi are the real and reactive power injected at node i, Vi and δi are the magnitude and the angle of the voltage at node i, and \(Z_{ij} = R_{ij} + jX_{ij}\) is the ijth element of \(\left[ {Z_{BUS} } \right] = \left[ {Y_{BUS} } \right]^{ - 1}\).
Active power losses are calculated with DGPP \((P_{L}^{wdg} )\) and without DGPP \((P_{L}^{wodg} )\) and APLI can be given as Eq. (6).
2.2 Reactive power loss index (RPLI)
In any N-node system total reactive power loss (QL) can be expressed by the Eq. (7) (Elgerd 1982).
where,
Reactive power losses are calculated with DGPP \((Q_{L}^{wdg} )\) and without DGPP \((Q_{L}^{wodg} )\) and RPLI can be given as Eq. (8).
2.3 Voltage profile index (VPI)
A minimum voltage of ith node is considered to improve the overall voltage profile of the system. Difference between slack node voltage (V1) and minimum node voltage without DGPP (\(V_{min}^{wodg}\)) is calculated. This difference and minimum node voltage with DGPP (\(V_{min}^{wdg} )\), are utilized to form voltage profile index (VPI). Voltage profile index is given as Eq. (9)
2.4 Objective function (OF)
A multi-objective function is formulated as in Eq. (10) by combining APLI, RPLI and VPI.
where
The value of the \(\sigma_{x}\) is determined as per the priority of objective of the optimization problem. In this paper equal priority is given to all performance indices.
The multi-objective function of (10) is minimized with following constraints:
Node voltage should be within permissible limits as:
Capacity of active and reactive power generation should be within limits as:
Active and reactive power generation should be able to fulfill the total demand and losses of the system. Mathematically, this can be written as Eqs. (14) and (15).
and
3 Particle swarm optimization (PSO)
Particle swarm optimization is a nature motivated optimization procedure, which is motivated by the social conduct of animals like flocking of birds in search of food. In the process of sustenance search, a bird compares its distance from of the food, to that of the group member closest to the food. On the basis of this information, group makes amendment in the search procedure of the food. This group is known as ‘population’ and each bird is known as ‘particle’.
Kennedy and Eberhart (1995) have proposed the concept of PSO. In PSO, initially a random population of particles is generated with random positions and random velocities of particles. Random velocity is denoted by v(t) and random position is denoted by x(t). Optimization process progresses ahead with the movement of particles towards the best position (Gbest) in the swarm. Individual’s best location of particle is denoted by (Pbest). In each iteration, all particles moves towards the particle, having best position in the swarm. This process continues till the achievement of the global optimum solution. Velocity and position of the particles, in each iteration can be expressed mathematically by the Eqs. (16) and (17).
where: w: the inertia weight, \(c_{1} and\, c_{2}\): the acceleration coefficients, R1 and R2: uniformly distributed random numbers between 0 and 1, \(X_{i}\): Position of ith particle, \(V_{i}\): Velocity of ith particle, \(P_{besti}\): best position achieved by the ith particle, \(G_{best}\): Best position achieved ever.
The first part of Eq. (16) is corresponding to the local velocity of the particle, second part is the individual cognitive part and the third part is the swarm cognitive part. Velocity of particles depends on inertia weight w. Its value is generally taken between 0.4 and 0.95.
In general, PSO is faster optimization technique compared to other optimization techniques but, when PSO is used to optimize complex problems then, sometimes it may result in local optimum solution. Reason for this can be explained as follows:
-
1.
The initial value of inertia weight also affects the particle velocity in each iteration, hence it is generally considered to be constant in each iteration. A too small inertia weight results in a local optimum solution and too high inertia weight results in such a fast movement of the particle that it may miss the global optimum solution. Some algorithms, both linear and non-linear, are available for determining the inertia weight but none have produced perfect estimation.
-
2.
It is clear from the third part of the Eq. (16), that all particles in the swarm receive the same information and move towards Gbest. Due to this, all the particles are quickly attracted by it and this reduces the variety of the swarm.
In PSO, a single particle acts as a guide to the swarm and all particles moves towards that particle. If there are several local optimum solutions available then, during the movement there is the possibility of trapping in the local optimum solution. This possibility of trapping at local optima can be avoided by incorporating the clonal selection principle with the PSO. After incorporating the clonal selection principle, new particles will be generated at the location of Gbest. Thus probability of trapping in local optima will decrease and optimization process will be faster. Although PSO is having the capability of self improving but sometimes it may be trapped in local optimum solution but clonal selection principle avoids such a problem. Hence, CPSO will provide better search ability.
4 Clonal particle swarm optimization (CPSO)
Principe of CPSO is derived from the Artificial Immune System (AIS) hypothesis. AIS theory explains the reaction of human or animal body against antigen. Human or animal body have infinite numbers of ‘B’ and ‘T’ cells and each ‘B’ or ‘T’ cell has selective property and sensitive to a particular type of antigen. Antigen receptor is available on the surface of ‘B’ or ‘T’ cells. Selective property of ‘B’ or ‘T’ cells ensures that, only one cell is able to bind with the antigen successfully. After activation of the ‘B’ and ‘T’ cells, these cells are cloned rapidly and this complete process is known as clonal selection. After clonal selection process, cells undergo to a series of irreversible changes to produce plasma cells and memory cells. de Castro and Von Zuben (2002) explained the process of clonal selection.
Clonal PSO is a combination of clonal principle of natural immune system and the PSO. In this algorithm, clones of best particle are created and ‘M’ new particles, at the position of Gbest, are generated. Due to this, second and third term in the velocity update equation becomes zero and the velocity and position update equations are modified as follows:
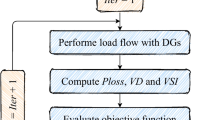
By updating the velocity and position according to above equations other steps remain similar to PSO. The whole process is repeated until optimum position is found. Flow chart of the proposed methodology is shown in Fig. 1. Convergence of the optimization problem depends on the inertia weight of the Eq. (18). In this paper, time varying inertia weight is used during optimization.

Flow chart of the proposed clonal selection algorithm
5 Results and discussion
The versatility of the proposed algorithm is checked by applying it in two different types of distribution systems i.e. in radial as well as in loop distribution systems. Accordingly two different cases are considered. In Case I, IEEE 33- node radial distribution system is considered and in case II, IEEE 14-node loop distribution system is considered.
In this article following assumptions are made for simplification purpose:
-
In case-I DGPP is operating at unity power factor and supplying active power support only.
-
In case-II DGPP is able to provide active as well as reactive power support.
-
All nodes are selected as candidate location of DGPP except slack node.
-
DGPP connection node is considered as PV node.
Case I:
For testing the validity of the proposed methodology in radial distribution system, IEEE 33-node radial distribution system (Baran and Wu 1989) is considered as a test system and the results of the proposed method are compared with some other existing methods. The test system has 33 nodes and 32 lines with total active power demand of 3.72 MW and total VAr demand of 2.3 MVAR. During implementation, population size is taken as 25 and the maximum number of iterations is 100. The objective function is formulated according to Eq. (10) and is optimized as per the proposed algorithm. Results are shown in Table 1.
Base case active losses are 211.2 kW, which are calculated by the approximate load flow method. The results of the proposed methodology are compared with the LSF (Hung and Mithulananthan 2013), IA (Hung and Mithulananthan 2013), ELF (Hung and Mithulananthan 2013), PSO (Hien et al. 2013), LSF (Muthukumar and Jayalalitha 2016), Hybrid Algorithm (Muthukumar and Jayalalitha 2016), and CSA (Lalitha et al. 2011). As evident from the data presented in Table 1, the aforementioned algorithms either minimize the real losses or the total power losses only. The proposed algorithm not only minimizes the total losses but improves the voltage profile as well. VPI term improves the voltage profile of the system. Although CSA used in (Lalitha et al. 2011) is having similar objective but proposed algorithm is clearly distinctive from earlier one in following manner:
-
a.
In CSA (Lalitha et al. 2011), all solutions are selected for the cloning, but in the proposed algorithm, only best solution is selected for cloning and hence results in faster optimization process.
-
b.
Objective function of the CSA (Lalitha et al. 2011) is single objective; to minimize real losses only by placement of single DGPP but in proposed algorithm a multi-objective function is formulated for the minimization of total losses and improvement of voltage profile.
Results show that, using proposed method optimum size DGPP is 2.2 MW and its location is node number 7. This size of DGPP is least among compared methods, which results in minimum line losses with significant improvement in the minimum bus voltage. There is considerable saving in active and reactive line losses. Graphically this saving is shown in Figs. 2 and 3 respectively. Higher reactive power flow results in excessive heating and voltage drop in the lines. Thus, reduction in the reactive power flow is desired to avoid such problems in the existing system.

Active line loss saving in IEEE-33 node system

Reactive line loss saving in IEEE-33 node system
Considering the size of DGPP, minimum size of DGPP is proposed by LSF (Hung and Mithulananthan 2013) method, but losses are not minimum. A comparative study of the results for size of DGPP and real losses for different methodologies with CPSO is shown in Fig. 4. Size proposed by LSF (Hung and Mithulananthan 2013) method results in only 30.5% loss reduction, comparatively size and location proposed by CPSO results in 51.7% loss reduction. Figure 4 clearly depicts that, for the minimum real losses, size proposed by the CPSO is minimum.

Size and loss comparison of CPSO
Figure 5 shows the comparison of loss saving and saving/MW of capacity, for different optimization techniques and CPSO. The saving per unit of MW capacity is more in LSF (Hung and Mithulananthan 2013) method, but in that case, loss saving is less than that of CPSO. Figure 5 supports that size and location proposed by CPSO will result in maximum loss reduction for maximum loss saving/MW.

Loss saving and saving/MW comparison of CPSO
Figure 6 shows the voltage profile of the system with and without DGPP, resulting in the improvement of the voltage profile of the system with the installation of DGPP. With this installation, minimum voltage is 0.9349 pu at node number 18, which is also improved. Since the DGPP is installed at node number 7 and hence, voltage profile of the nodes nearer to DGPP improves more and as the distance from the DGPP increases, the effect of DGPP decreases.

Voltage profile of the IEEE 33 node system with and without DGPP
Case-II:
In case-II, proposed algorithm is also implemented in IEEE 14-node loop distribution system. Data for the IEEE 14-node system is taken from Pai (1994). In loop distribution system, the proposed methodology is compared with other existing technologies as analytical (Ghosh et al. 2010) and modified differential evolution (MDE) (Kumar et al. 2013) technique. Since, in both these techniques objective function considers minimization of cost of DGPP and active losses and hence, for better comparison the objective function is formulated as (20):
where C = a + bPdg + cP 2dg , and \(\sum\nolimits_{x = 1}^{3} {m_{x} } = 1 \wedge m_{x} \in (0{\, 1)}\)
According to analytical method (Ghosh et al. 2010) optimum location of the DGPP is node number 8 and optimum size of the DGPP is 16 MW. In this case losses are 11.72 MW. Kumar et al. (2013) has proposed modified differential evolution (MDE) technique for optimum placement of DGPP in same system. According to MDE optimum size of DGPP is 34.12 MW and its location is node number 3. In this case, losses are 11.54 MW. Although using MDE, losses in the system are less but, the size of DGPP is greater than analytical method. Proposed CPSO is applied in the same system for the size and location optimization of DGPP. For proper comparison DGPP is assumed to provide reactive power support also. Capacity of reactive power support is only 20% of the active power capacity. Results and comparative study are shown in Table 2. Results show the superiority of the technique over the previous ones. Optimum size of the DGPP is found 33.95 MW and its optimum location is node number 6.
Overall losses of the system are also reduced compared to existing methods. Total active losses in analytical method are 16 MW and in MDE are 11.54 MW. Total losses by installing 33.95 MW DGPP at node number 6 will result in active loss of 10.811 MW. Thus lesser capacity of the DGPP results in minimum losses, for same objective function. Active and reactive line losses with and without DGPP are shown in Figs. 7 and 8 respectively. The results demonstrate the efficacy of the proposed algorithm for multi-objective optimization in loop distribution system.

Active line losses in IEEE 14 node system

Reactive line losses in IEEE 14 node system
6 Conclusions
This paper combines clonal selection principle of artificial immune system with PSO. A multi-objective function is optimized using this CPSO, for optimal placement of DGPP in IEEE 33-node radial as well as in IEEE 14-node loop distribution system. The results of the proposed methodology are compared to that obtained using other existing methodologies and it is found that the proposed optimization technique produces better results than the others. In radial distribution system, objective function of other compared methods is to minimize the real losses only but the objective function of proposed method is to minimize total losses and improve voltage profile. The results show that the optimum size of DGPP given by the proposed method is minimum and reduction in the losses is the maximum among all the compared methods. For IEEE 14-node loop distribution system, the objective function is reformulated for proper comparison. The objective function thus formulated, considers the cost of the DGPP, losses and the voltage profile of the system. Results show the effectiveness of the proposed algorithm over the compared ones in radial as well as in loop distribution system. The proposed algorithm can also be implemented for multiple DGPPs and variable loads.
References
Adefarati T, Bansal RC (2016) Integration of renewable distributed generators into the distribution system: a review. IET Renew Power Gener 10(7):873–884
Ameli A, Bahrami S, Khazaeli F, Haghifam M (2014) A multiobjective particle swarm optimization for sizing and placement of DGs from DG owner’s and distribution company’s viewpoints. IEEE Trans Power Delivery 29(4):1831–1840
Atwa Y, El-Saadany E (2011) Probabilistic approach for optimal allocation of wind-based distributed generation in distribution systems. IET Renew Power Gener 5(1):79
Baran M, Wu F (1989) Network Reconfiguration in distribution systems for loss reduction and load balancing. IEEE Power Eng Rev 9(4):101–102
Bhadoria VS, Pal NS, Shrivastava V (2013) A review on distributed generation definitions and DG impacts on distribution system. In: International conference on advanced computing and communication technologies (ICACCT™-2013). https://doi.org/10.13140/RG.2.1.4439.4328
Bhadoria VS, Pal NS, Shrivastava V (2014). Installation of DG for optimal demand compensation. In: 2014 international conference on issues and challenges in intelligent computing techniques (ICICT). IEEE, pp 816–819. https://doi.org/10.1109/icicict.2014.6781385
Bhadoria VS, Pal NS, Shrivastava V (2016). Comparison of analytical and heuristic techniques for multiobjective optimization in power system. In: Problem solving and uncertainty modeling through optimization and soft computing applications. IGI Global, pp 264–291. https://doi.org/10.4018/978-1-4666-9885-7.ch013
Bhadoria VS, Pal NS, Shrivastava V, Jaiswal SP (2017) Reliability improvement of distribution system by optimal sitting and sizing of disperse generation. Int J Reliab Qual Saf Eng 24(06):1740006. https://doi.org/10.1142/S021853931740006X
Bhadoria VS, Pal NS, Shrivastava V, Jaiswal SP (2018) Optimal sitting and sizing of capacitor using iterative search method for enhancement of reliability of distribution system. Lect Notes Electr Eng. https://doi.org/10.1007/978-981-13-0662-4_11
de Castro L, Von Zuben F (2002) Learning and optimization using the clonal selection principle. IEEE Trans Evol Comput 6(3):239–251
Elgerd OI (1982) Electric energy systems theory: an introduction. McGraw Hill Book Company, New York
Esmaeili M, Sedighizadeh M, Esmaili M (2016) Multi-objective optimal reconfiguration and DG (distributed generation) power allocation in distribution networks using big bang-big crunch algorithm considering load uncertainty. Energy 103:86–99
Esmaili M, Firozjaee E, Shayanfar H (2014) Optimal placement of distributed generations considering voltage stability and power losses with observing voltage-related constraints. Appl Energy 113:1252–1260
Ganguly S, Samajpati D (2015) Distributed Generation allocation on radial distribution networks under uncertainties of load and generation using genetic algorithm. IEEE Trans Sustain Energy 6(3):688–697
Ghosh S, Ghoshal S, Ghosh S (2010) Optimal sizing and placement of distributed generation in a network system. Int J Electr Power Energy Syst 32(8):849–856
Hadidian-Moghaddam MJ, Arabi-Nowdeh S, Bigdeli M, Azizian D (2017) A multi-objective optimal sizing and siting of distributed generation using ant lion optimization technique. Ain Shams Eng J 9(4):2101–2109
Hien N, Mithulananthan N, Bansal R (2013) Location and sizing of distributed generation units for loadabilty enhancement in primary feeder. IEEE Syst J 7(4):797–806
Hung D, Mithulananthan N (2013) Multiple distributed generator placement in primary distribution networks for loss reduction. IEEE Trans Ind Electron 60(4):1700–1708
Hung D, Mithulananthan N, Bansal R (2010) Analytical expressions for DG allocation in primary distribution networks. IEEE Trans Energy Convers 25(3):814–820. https://doi.org/10.1109/tec.2010.2044414
Hung D, Mithulananthan N, Bansal R (2013) Analytical strategies for renewable distributed generation integration considering energy loss minimization. Appl Energy 105:75–85
Hung D, Mithulananthan N, Bansal R (2014) An optimal investment planning framework for multiple distributed generation units in industrial distribution systems. Appl Energy 124:62–72
Jaiswal SP, Shrivastava V (2018) A PSO based search for optimal tuning and fixing of UPFC to improve usefulness of distribution system. J Intell Fuzzy Syst 35(5):4987–4995. https://doi.org/10.3233/JIFS-169783
Kennedy J, Eberhart R (1995) Particle swarm optimization. In: Proceedings of IEEE International Conference on Neural Networks, vol 4. IEEE Service Center, Piscataway, NJ, pp 1942–1948
Kumar S, Pal D, Mandal KK, Chakraborty N (2013) Performance study of a new modified differential evolution technique applied for optimal placement and sizing of distributed generation. In: International conference on swarm, evolutionary, and memetic computing. Springer, pp 189–198
Lalitha M, Reddy V, Reddy N, Reddy V (2011) DG source allocation by fuzzy and clonal selection algorithm for minimum loss in distribution system. Distrib Gener Altern Energy J 26(4):17–35
Manikanta G, Mani A, Singh H, Chaturvedi D (2016) Placing distributed generators in distribution system using adaptive quantum inspired evolutionary algorithm. In: 2016 second international conference on research in computational intelligence and communication networks (ICRCICN). https://doi.org/10.1109/icrcicn.2016.7813649
Manikanta G, Mani A, Singh H, Chaturvedi D (2018) Simultaneous placement and sizing of DG and capacitor to minimize the power losses in radial distribution network. Adv Intell Syst Comput. https://doi.org/10.1007/978-981-13-0589-4_56
Moradi M, Abedini M (2012) A combination of genetic algorithm and particle swarm optimization for optimal DG location and sizing in distribution systems. Int J Electr Power Energy Syst 34(1):66–74
Muthukumar K, Jayalalitha S (2016) Optimal placement and sizing of distributed generators and shunt capacitors for power loss minimization in radial distribution networks using hybrid heuristic search optimization technique. Int J Electr Power Energy Syst 78:299–319
Muttaqi K, Le A, Aghaei J, Mahboubi-Moghaddam E, Negnevitsky M, Ledwich G (2016) Optimizing distributed generation parameters through economic feasibility assessment. Appl Energy 165:893–903
Nguyen T, Truong A, Phung T (2016) A novel method based on adaptive cuckoo search for optimal network reconfiguration and distributed generation allocation in distribution network. Int J Electr Power Energy Syst 78:801–815
Pai MA (1994) Computer techniques in power system analysis. Tata Mc. Graw Hill, New Delhi
Prakash P, Khatod D (2016) Optimal sizing and siting techniques for distributed generation in distribution systems: a review. Renew Sustain Energy Rev 57:111–130. https://doi.org/10.1016/j.rser.2015.12.099
Rama Prabha D, Jayabarathi T (2016) Optimal placement and sizing of multiple distributed generating units in distribution networks by invasive weed optimization algorithm. Ain Shams Eng J 7(2):683–694
Singh B, Mukherjee V, Tiwari P (2016) Genetic algorithm for impact assessment of optimally placed distributed generations with different load models from minimum total MVA intake viewpoint of main substation. Renew Sustain Energy Rev 57:1611–1636
Sultana S, Roy P (2016) Krill herd algorithm for optimal location of distributed generator in radial distribution system. Appl Soft Comput 40:391–404
Theo W, Lim J, Ho W, Hashim H, Lee C (2017) Review of distributed generation (DG) system planning and optimisation techniques: comparison of numerical and mathematical modelling methods. Renew Sustain Energy Rev 67:531–573
Viral R, Khatod D (2015) An analytical approach for sizing and siting of DGs in balanced radial distribution networks for loss minimization. Int J Electr Power Energy Syst 67:191–201
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Bhadoria, V.S., Pal, N.S. & Shrivastava, V. Artificial immune system based approach for size and location optimization of distributed generation in distribution system. Int J Syst Assur Eng Manag 10, 339–349 (2019). https://doi.org/10.1007/s13198-019-00779-9
Received:
Revised:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s13198-019-00779-9