
Abstract
K-out-of-n redundant systems are used to increase reliability in various industries. The failure of a component in such systems is dependent upon the failure of other components. Therefore, if an appropriate model is not developed to take dependent failures into consideration, reliability and MTTF of redundant systems are evaluated wrongly. One of the most crucial varieties of dependent failures is common cause failure. Common cause failure refers to the failure of two or more components of a k-out-of-n system which occurs simultaneously or within a short time interval and thus components are direct failures resulting from a shared cause. Another type of dependent failure in k-out-of-n redundant systems is load share, where the failure of one component leads to increased load in surviving components, hence changing their failure rate. In this paper, using Markov chain, three models are used to evaluate the MTTF of a 2-out-of-3 redundant system by taking dependent failures into account. Model I addresses the MTTF of a 2-out-of-3 redundant system by considering common cause failure based on alpha factor model. In Model II, both dependent failures (common cause failure and load share) are examined based on capacity flow and alpha factor model. In Model III, in addition to common cause failure and load share, component repair is studied, too. In order to examine the validity of the models introduced and conduct sensitivity analysis, some diagrams are drawn for each model. Considering the dependent failures in the 2-out-of-3 redundant systems, all the three proposed models can be practical and be used to evaluate MTTF.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Due to its special significance in the design, production, and maintenance phases, investigation of system reliability has always been carried out by designers and engineers. System reliability must be evaluated precisely and correctly. Hence, the assumption of independent components is ruled out, because in the real world the failure of one component affects other components, thus leading to dependent failure.
In some systems, in order to increase reliability, n components are used in parallel, so that the system does not undergo failure and continues functioning in case of failure of one component. If k system components experience failure, the whole system breaks down. Such systems are known as k-out-of-n systems. In k-out-of-n systems, there are commonly two types of dependent failures. The most important dependent failure which affects the safety of the redundant system is common cause failure (CCF). CCF refers to the failure of two or more components of a k-out-of-n system which occurs simultaneously or within a short time interval and thus components are direct failures resulting from a shared cause (Hwang and Kang 2011). Following the occurrence of a fire at a nuclear power plant in Alabama in 22 March 1975, CCF began to receive greater attention in nuclear industries (Rausand and Høyland 2004).
Load share is another type of dependent failure in k-out-of-n systems, in which the failure of one component increases the load applied to other system components.
The early models which consider load share in redundant systems are state graph model, capacity flow model (Pozsgai et al. 2003) and Freund model (Freund 1961). Platz (1984) used a continuous time four-state Markov chain to investigate dependency in a redundant system. Shao and Lamberson (1991) examined the reliability and availability of load share in k-out-of-n systems. Lin et al. (1993) developed a multivariate exponential share load model. In most mechanical systems, the failure rate of components is not constant. Pozsgai et al. (2003) developed general simulation algorithms for 1-out-of-n systems with load share, in which failure rate is dependent on time. Having discussed modeling concepts in load share systems, Amari and Bergman (2008) elaborated on existing analysis methods and their laminations in the analysis of load share systems. Sharifi et al. (2009) used markov chain and considered a k-out-of-n system with n parallel and identical components with increasing failure rates and non repairable components. A load-sharing parallel system is considered when the lifetimes of the components in the system are any continuous random variables by Yun and Cha (2010). Maatouk et al. (2011) used the Markov process and the universal generating function to evaluate the reliability of series–parallel multi-state systems in the presence of load share. The reliability analysis of load-sharing k-out-of-n systems under the shared load by different conditions for the load and Weibull probability distributions of time to component failure has been provided by Gurov and Utkin (2015).
Various models such as beta factor (Fleming 1975), alpha factor (Mosleh and Siu 1987) and MGL (Fleming and Kalinowski 1983) have been developed to measure the possibility of component failure with CCF. Dhillon and Anude (1994) advanced Mean Time To Failure (MTTF) of the redundant system in the presence of warm standby and CCF. Byeon et al. (2009) used the dynamic fault tree to incorporate independent failure and CCF, and proposed the new analysis. Jain and Gupta (2012) dealt with load share and CCF in a k-out-of-n redundant system with non-identical and non-reparable components. Moreover, Jain (2013) investigated the availability of redundant system, CCF, and reboot delay. Yusuf et al. (2014) developed an explicit expression for MTTF of a 3-out-of-5 system with warm standby in the presence of CCF. They also took the reparability of the components into consideration. Specifically, in some cases where it is impossible to identify the dependent failure in the systems, the copula function is used to compute the characteristics and features. Using copulas, Jia et al. (2014) studied some systems with arbitrary dependent components and investigated the efficiency of the formulas presented in series, parallel, and k-out-of-n systems. In their work, all components are interdependent, and dependent relations may be linear or nonlinear. Troffaes et al. (2015) investigated the imprecise continuous time Markov chain to find out how it can improve on the traditional reliability models. They deemed reparability non-immediate, addressed CCF, and particularly analyzed the reliability of power networks. They also incorporated the CCF into their proposed model, assuming that following a CCF event all components suffer failure simultaneously. Kumar and Sankar (2016) attempted of made to analyze the limiting state probabilities (LSP) of states for small and large repairable systems in which, the components are prone for failures due to CCF.
It is crucial that equipment and systems perform their functions efficiently during their mission time. Hence, in order to enhance the performance of repair systems, some features such as reliability, maintenance, and supportability are invariably taken into consideration by engineers. Asjad et al. (2013a, b) integrated the opportunistic policy in the maintenance and supportability schedule for a reciprocating compressor. Asjad et al. (2015) took into consideration the reliability, maintenance, and supportability of a repair system and developed a mathematical model for estimating the availability of systems. The failure rate of mechanical systems (e.g. pumps, motors, turbines, etc.) increases with the passage of time. Therefore, maintenance actions require opportunistic policies. Asjad et al. (2016) investigated maintenance and found an optimal level of supportability at lowest possible costs. Supportability is highly crucial for products. It comes in a variety of ways such as installation, commissioning, documentation, training, warranty, and maintenance (Asjad et al. 2013a, b), with maintenance being the most important and MTTF computation is one of the most important parts of maintenance. It includes precise evaluation as well as consideration of all dependent failures. An efficient way to evaluate the reliability and MTTF of systems is use of mathematical methods such as state transition diagrams or markov chains which appeal to researchers. Using state transition diagrams and Laplace transform techniques, Ram and Nagiya (2016) evaluated system reliability and MTTF and conducted a sensitivity analysis for different parameters of the proposed model. Using Kolmogorov’s forward equation, Yusuf and Hussaini (2012) developed various features such as MTTF, steady state availability for a 2-out-of-3 system.
k-out-of-n redundant systems under load share and CCF have been prevalently investigated in the literature but few research has addressed two types of dependent failure simultaneously. Most studies on CCF have posited that a CCF event entails the simultaneous failure of all redundant system components. But, this is not the case (for 2-out-of-3 systems), and it is possible that following a CCF event only some of the components in the redundant system suffer failure. Another gap existing in the researches is the development of models with various parameters which are difficult to estimate and hence inapplicable. To tackle this problem, in the present study, the alpha factor and the capacity flow models were used. These two models have extensive application in industries, and studies have attempted to estimate their parameters.
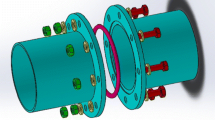
High pressure water pumps play an indispensable role in industrial equipment, including in nuclear industries (Kang et al. 2011), cooling towers (Rahmati et al. 2016; Alavi and Rahmati 2016), main water transfer routes and etc. High pressure water pumps are placed in the main route of water pipelines to compensate for water pressure drop. Failure of these pumps leads to water outages in the water supply network. Three pumps are used in parallel so as to prevent water outage in case of failure of one pump (Fig. 1). In the event of failure of two of the three pumps, the water supply network undergoes pressure drop or water outage (2-out-of-3 system). Besides, due to the water pressure inside the pipes, if one of the pumps fails, pressure accumulates on the surviving pumps (load share). Moreover, the water pumping system is a redundant system which fails due to CCF as well as independent failure. Today, drinking water outage in a city has political, social, cultural, and health consequences. Therefore, in recent years, authorities have paid attentions to the maintenance of pipelines and water pumps. As mentioned above, one of the important features in the maintenance and inspection of systems is Mean Time Between Failure (MTBF). MTBF helps the maintenance operator to estimate the time to failure of the system and start the maintenance operation before the system fails. Furthermore, MTBF is instrumental in controlling the maintenance costs of the water pumps. In this paper, using Markov chain and Laplace transform techniques, MTBF is computed for municipal water pumping system by taking reparability, load share, and CCF into consideration. The model developed is applicable for all k-out-of-n redundant system configurations with dependent components. To verify the validity and utility of the structure developed, the dependencies and reparability are taken into consideration in the model step by step.

High pressure water pumps 2-out-of-3 redundant system
The organization of the paper is as follows: In Sect. 2, Assumptions and notations are presented. In Sects. 3 and 4, an introduction to the alpha factor model and capacity flow model is presented. In Sect. 5.1, the MTTF for 2-out-of-3 redundant system is computed with CCF based on alpha factor model. In Sect. 5.2, the model of capacity flow for load share is used and added to the model presented in Sect. 5.1. In Sect. 5.3, reparability in the proposed model is addressed, and, using the absorbing state, MTBF is computed for municipal water pumping system.
2 Assumptions and notations
-
The system and the components operate in a binary fashion. They either work or fail.
-
The components are considered identical.
-
Using technical and engineering measures, load share in high pressure water pumps is detected.
-
Initially, all system components function (They are in good condition).
-
After repairs, the system functions in a new and good fashion.
-
After failure of a component, the load is distributed equally on the surviving components.
-
Component failure is detected and repaired immediately.
-
Failure frequency and repair frequency of the components is constant (component lifetime has an exponential distribution).
-
Components are repaired singly (There is one repairman).
\(t\) | Time scale (h) |
\(s\) | Laplace transforms variable |
\(P_{k} (t)\) | Probability that k components are fail at time t (k = 0, 1, 2, 3) |
\(A_{I} ,B_{I} ,C_{I}\) | Independent failures of components A, B, and C |
\(C_{AB} ,C_{AC} ,C_{BC}\) | Failures of A&B, A&C, B&C due to CCF |
\(C_{ABC}\) | Failure of A&B&C due to CCF |
\(Q_{1}\) | Independent failures rate (failure per 1000 h) |
\(Q_{2}\) | Simultaneous failure rate of two components caused by common cause (failure per 1000 h) |
\(Q_{3}\) | Simultaneous failure rate of three components caused by common cause (failure per 1000 h) |
\(Q_{x}^{*}\) | Failure rate of surviving components after suffering the failure of component X (failure per 1000 h) |
\(\gamma\) | Load factor |
\(\mu\) | Repair rate (repaire per 100 h) |
\(W_{I} ,W_{I} ,W_{III}\) | The rates of transition matrix for model I, II and III |
3 Alpha factor model
CCF is a subset of dependent failures, and it influences the reliability of redundant systems considerably. The alpha-factor model was developed by Mosleh in 1998 in order to consider CCF in k-out-of-n redundant systems.
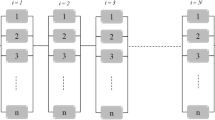
Following the presentations in NUREG/CR-4780 and NUREG/CR-5485 (Mosleh et al. 1988, 1998), the basic parameter model is best explained with an example using a 2-out-of-3 redundant system of similar components (A, B, and C).
Figure 2 illustrates the fault tree for a 2-out-of-3 system for the 3 identical components A, B and C. These three components constitute a common cause component group (CCCG). A common cause component group is a set of components which suffer failure due to a common cause besides their independent failure. The minimal cut sets for the fault tree in Fig. 2 are as follow:

Fault tree of 2-out-of-3 system
Each component A, B and C undergoes CCF as well as independent failure. Figure 3 illustrates the fault tree of component A. The minimal cut sets for this fault tree are as follows:

Fault tree for component A
And, in a similar vein, the minimal cut sets for components B and C is:
In the above equation \(A_{I}\), \(B_{I}\), and \(C_{I}\) are the independent failures of components A, B, and C, respectively. Also, \(C_{AB}\), \(C_{AC}\), \(C_{BC}\), and \(C_{ABC}\) are the failures of A&B, A&C, B&C, and A&B&C, respectively, due to common cause. Thus, the probability of failure of a 2-out-of-3 redundant system is:
CCCG in water pumping system is presented in Fig. 4.

CCCG for high pressure water pumps
In order to simplify the equation, it is assumed that:
Hence, the probability of failure of a 2-out-of-3 redundant system is:
In alpha factor model, the two parameters \(Q_{T}\) and \(\alpha_{k}\) are defined: \(Q_{T}\) is the total failure frequency of the system caused by independent failure and CCF; \(\alpha_{k}\) is a fraction of the total frequency of failure event including the failure k of the component in the system. Hassija et al. (2014), Kang et al. (2011) and Zheng et al. (2013) developed methods to estimate the value of \(\alpha_{k}\).
There are two types of testing schemes here: staggered testing scheme and non-staggered testing scheme. A staggered testing scheme is a scheme where components are tested separately within an equal time interval. Therefore, for the staggered testing scheme,
and for the non-staggered testing scheme
where
In this paper, a staggered testing scheme along with Eq. 8 is used.
4 Capacity flow model
Load share is another type of dependent failure. When a component suffers failure in a redundant system, the load applied to the surviving components increases. This increase changes the failure rate of the surviving components, hence affecting the total system MTTF. The capacity flow model is a simple model for load share. It this model, a k-out-of-n system with n identical components is assumed. Load L is applied equally to all operation components. When all the components are in operation, the load applied to each component equals L/n. As soon as the first component begins to suffer failure, load L/n − 1 increases on the surviving components. The initial failure rate for all the components equals \(Q_{1}\). Due to the load increase following the failure of the first components, the failure rate of the surviving components equals \(Q_{x}^{*}\), which is defined as follows:
x is the number of components suffering failure in a redundant system, and \(\gamma\) is the load factor. Load share exists in most redundant engineering systems such as electric generators, water pumps, cables in suspension bridges, CPUs, graphics cards, laptop RAMs, etc.
5 Description and model preparation
In this section, three models are presented to evaluate the MTTF and MTBF of a 2-out-of-3 redundant system with dependent failures and repair. In cases where there is CCF as well as component independent failure in a redundant system, Model I can be used to evaluate MTTF. In redundant systems with more than two components, it is possible that a CCF event does not entail the simultaneous failure of all components (instead, the components may suffer failure in groups of two, three, or more). In order to consider this issue in the evaluation of MTTF of such systems, the alpha factor model is employed. In addition to the CCF, some redundant systems undergo load share, too. The MTTF of such systems can be evaluated using Model II. If the components of a redundant system are repairable, Model III can be used to evaluate MTBF. Therefore, each of the three aforementioned models can be used to the redundant system of high pressure water pumps following the expert judgment.
5.1 Model I
Letting \(P_{n} (t)\) to be the probability that n components are fail at time t (n = 0, 1, 2, 3); and (X(t), t ≥ 0) is governed by continuous-time homogeneous markov process. The rates of transition matrix for the first model is as follows.
The differential equations can be expressed as
Differential equations based on Eq. 13 obtained
Laplace transform is defined \(P_{n}^{*} \left( s \right) = \mathop \smallint \limits_{0}^{\infty } e^{ - st} \cdot P_{n} \left( t \right)d_{t}\) (n = 0, 1, 2, 3) for \(P_{n} (t)\) and Possibilities row vector in the initial state of the system is \(P_{n} \left( 0 \right) = \left[ {P_{0} \left( 0 \right) P_{1} \left( 0 \right) P_{2} \left( 0 \right) P_{3} \left( 0 \right)} \right] = [1 0 0 0]\) So the Laplace transform of Eq. 14 is obtained as follows:
We obtained inverse Laplace of Eq. 15 as follows:
Whereas the system is a 2-out-of-3 so the reliability function of the system is given by
The MTTF for Model I is
where
Figures 5 and 6 are shown reliability function (Eq. 17) and MTTF function (Eq. 18) Respectively For specific values of \(Q_{T}\) (\(\alpha_{1} = 0.5,\;\alpha_{2} = 0.3,\;\alpha_{3} = 0.2\)).

Sensitivity of reliability as function of time

Sensitivity of MTTF as function of \(Q_{T}\)
The diagram in Fig. 5 clearly illustrates the effect of CCF on the reliability of 2-out-of-3 redundant system. Increase in \(Q_{T}\) leads to considerable decrease in system reliability. As illustrated by the diagram in Fig. 6, increase in \(Q_{T}\) leads to decrease in MTTF, too.
5.2 Model II
In this model, the CCF is considered with the alpha factor model, and the load share is considered with capacity flow model simultaneously. Letting \(P_{n} (t)\) to be the probability that n components are fail at time t (n = 0, 1, 2, 3); and (X(t), t ≥ 0) is governed by continuous-time homogeneous Markov process. The rates of transition matrix for the model II is as follows:
The Differential equations can be expressed as:
Differential equations based on Eq. 21 obtained:
Laplace transform is defined \(P_{n}^{*} \left( s \right) = \mathop \smallint \limits_{0}^{\infty } e^{ - st} \cdot P_{n} \left( t \right)d_{t}\) (n = 0, 1, 2, 3) for \(P_{n} (t)\) and Possibilities row vector in the initial state of the system is \(P_{n} \left( 0 \right) = \left[ {P_{0} \left( 0 \right) P_{1} \left( 0 \right) P_{2} \left( 0 \right) P_{3} \left( 0 \right)} \right] = [1 0 0 0]\) So the Laplace transform of Eq. 22 is obtained as follows:
We obtained inverse Laplace of Eq. 23 for \(P_{0} \left( t \right)\) and \(P_{1} \left( t \right)\) as follows
Whereas the system is a 2-out-of-3 so the reliability function of the system is given by
The MTTF for Model II is
where
The diagram in Fig. 7 presents the sensitivity analysis of the reliability function of model II for (\(\alpha_{1} = 0.5,\alpha_{2} = 0.3,\alpha_{3} = 0.2\)) and (γ = 0.25). In this diagram, reliability is decreased over time and It is also decreased as \(Q_{T}\) increases. The sensitivity analysis of MTTF function is illustrated by Fig. 8. \(Q_{T}\) and MTTF have an inverse relationship, so that increase in \(Q_{T}\) is accompanied by decrease in MTTF.

Sensitivity of reliability as function of time

Sensitivity of MTTF as function of \(Q_{T}\)
5.3 Model III
In this model, besides CCF and load share, component repair is also incorporated. The main rule to evaluate MTTF is presented in Eq. 28. As indicated, MTTF evaluation requires a system reliability function measured in time.
Considering the state transition matrix in model III (Eq. 29), the Laplace transform techniques could not be readily used to estimate the system reliability function. Therefore, in this section, a method is adopted to evaluate the MTBF of such systems, and using this method, the MTBF of model III is computed (see Wang et al. 2006; Sridharan 2006; Hajeeh 2011; Yen et al. 2013).
Matrix transpose \(W_{III}\) is used to compute MTBF. Afterwards, the rows and columns of matrix \(W_{III}\) are removed for the absorbing state. The new matrix is called \(W_{{III_{absorbing} }}\).
The initial state is
Then, using Eq. 30, the MTBF of model III equals
Figure 9 illustrates sensitivity analysis versus μ for model III. Increase in μ is accompanied by Increase in MTBF.

Sensitivity of MTBF as function of μ (\(Q_{T} = 0.001\))
Some kinds of dependent failure increase reliability (known as negative dependency failure). In contrast, CCF and load share both decrease the reliability of redundant systems. Therefore, following the effect of CCF and load share, the system MTTF/MTBF is reduced dramatically, too. In model I which incorporates only CCF, MTTF for different values of \(Q_{T}\) is greater than MTTF in the model II. In model III, repair is taken into consideration, too. Under such circumstances, MTBF for different values of \(Q_{T}\) is greater than that in models I and II. If \(Q_{T}\) increases (considering \(\mu = 0.003\)), the MTBF of model III does not exhibit a considerable increase compared to that of models I and II (Fig. 10). Hence, if repair rate changes to 0.03, the MTBF of model III is increased (See Fig. 11).

Sensitivity of MTTF/MTBF as function of \(Q_{T}\) (μ = 0.003)

Sensitivity of MTTF/MTBF as function of \(Q_{T}\) (μ = 0.03)
As well as undergoing independent failure, all k-out-of-n systems also suffer failure due to CCF. Model I is used to evaluate the MTTF of such systems. In some other redundant systems, for reasons of system optimization, economic design, and improvement of conditions, the system is designed in such a way that there is load share among the components while the components are not reparable (like in CUPs). In such cases, model II is used to evaluate the MTTF. 2-out-of-3 redundant systems (like in high pressure municipal water pumps) enjoy CCF, load share, and reparability. Therefore, model III may be suitable for evaluating the MTBF of such systems. Hence, each of the three models presented in this paper can be applied to redundant systems with dependent components.
6 Conclusion
In most of the redundant systems, components are interdependent. Due to this interdependency, failure of one component affects other components (dependent failure). The present study deals with a 2-out-of-3 redundant system with identical components, CCF, load share, and repair. The MTTF and MTBF of this system is presented in three models: model I with CCF based on alpha factor, model II with load share based on capacity flow, and model III with component repair; each model develops and improves the previous model. Considering the judgment of technical experts and design engineers of the system, each of these three models can be used to evaluate the MTTF or MTBF of a 2-out-of-3 redundant system. The models used can be developed to be applied to k-out-of-n systems. In the present study, capacity flow and alpha factor models, which are functional model, are used. Sensitivity analysis was carried out to validate the models, and, finally, a comparison was drawn among the MTTFs and MTBF of the three models. CCF and load share decrease MTTF/MTBF in k-out-of-n systems. Omission of the dependent failure in the evaluation of MTTF/MTBF systems leads to irreversible damages. In order to improve and increase MTTF/MTBF in k-out-of-n systems, standby components are used so that in case of failure of one component, the failing component can be replaced by the standby component. Future researches can evaluate reliability, availability, MTTF and MTBF of k-out-of-n systems with CCF, load share, repair, standby components, and non-identical components. Besides, in the present study, failure rate and repair of components were assumed to be constant, while, this is not always the case in real situations. Future studies may also investigate the failure rate of time-dependent components.
References
Alavi SR, Rahmati M (2016) Experimental investigation on thermal performance of natural draft wet cooling towers employing an innovative wind-creator setup. Energy Convers Manag 122:504–514
Amari SV, Bergman R (2008) Reliability analysis of k-out-of-n load-sharing systems. In: Reliability and maintainability symposium RAMS. Annual IEEE, pp 440–445
Asjad M, Kulkarni MS, Gandhi O (2013a) A life cycle cost based approach of O&M support for mechanical systems. Int J Syst Assur Eng Manag 4:159–172
Asjad M, Mohite S, Kulkarni MS, Gandhi O (2013b) Opportunistic actions for subassemblies of a reciprocating compressor: an LCC based approach. Int J Perform Eng 9:273–285
Asjad M, Kulkarni MS, Gandhi O (2015) An insight to availability for O&M support of mechanical systems. Int J Product Qual Manag 16:462–472
Asjad M, Kulkarni MS, Gandhi O (2016) Supportability issues of mechanical systems for their useful life. J Eng Des Technol 14:33–53
Byeon Y-T, Kwon K, Kim J-O (2009) Reliability analysis of power substation with common cause failure. In: International conference on power engineering, energy and electrical drives IEEE, pp 467–472
Dhillon B, Anude O (1994) Common-cause failure analysis of a redundant system with repairable units. Int J Syst Sci 25:527–540
Fleming K (1975) Reliability model for common mode failures in redundant safety systems. In: Vogt WG, Mickle MH (eds) Annual conference on modeling and simulation (IAEA), vol 6, Part 1. Pittsburgh, Pennsylvania, USA. https://inis.iaea.org/search/search.aspx?orig_q=RN:7275774
Fleming K, Kalinowski A (1983) An extension of the beta factor method to systems with high levels of redundancy. PLG-0289. Pickard, Lowe and Garrick, Inc, Newport Beach
Freund JE (1961) A bivariate extension of the exponential distribution. J Am Stat Assoc 56:971–977
Gurov SV, Utkin LV (2015) Reliability analysis of load-sharing m-out-of-n systems with arbitrary load and different probability distributions of time to failure. Int J Reliab Saf 9:21–35
Hajeeh MA (2011) Reliability and availability of a standby system with common cause failure. Int J Oper Res 11:343–363
Hassija V, Kumar CS, Velusamy K (2014) A pragmatic approach to estimate alpha factors for common cause failure analysis. Ann Nucl Energy 63:317–325
Hwang M, Kang DI (2011) Estimation of the common cause failure probabilities on the component group with mixed testing scheme. Nucl Eng Des 241:5275–5280
Jain M (2013) Availability prediction of imperfect fault coverage system with reboot and common cause failure. Int J Oper Res 17:374–397
Jain M, Gupta R (2012) Load sharing M-out of-N: G system with non-identical components subject to common cause failure. Int J Math Oper Res 4:586–605
Jia X, Wang L, Wei C (2014) Reliability research of dependent failure systems using copula. Commun Stat Simul Comput 43:1838–1851
Kang DI, Hwang MJ, Han SH (2011) Estimation of common cause failure parameters for essential service water system pump using the CAFE-PSA. Prog Nucl Energy 53:24–31
Kumar DR, Sankar V (2016) Approximate system reliability analysis of distribution networks with repairable components and common cause failures. i-Manag J Electr Eng 9:32
Lin H-H, Chen K-H, Wang R-T (1993) A multivariant exponential shared-load model. IEEE Trans Reliab 42:165–171
Maatouk I, Chatelet E, Chebbo N (2011) Reliability of multi-states system with load sharing and propagation failure dependence. In: Quality, reliability, risk, maintenance, and safety engineering (ICQR2MSE) international conference on IEEE, pp 42–46
Mosleh A, Siu N (1987) A multi-parameter common cause failure model. In: Transactions of the 9th international conference on structural mechanics in reactor technology. Vol. M
Mosleh A, Fleming K, Parry G, Paula H, Worledge D, Rasmuson DM (1988) Procedures for treating common cause failures in safety and reliability studies: vol 1, procedural framework and examples: final report. Pickard, Lowe and Garrick, Inc. Newport Beach, CA (USA)
Mosleh A, Rasmuson DM, Marshall F (1998) Guidelines on modeling common-cause failures in probabilistic risk assessment. Safety Programs Division, Office for Analysis and Evaluation of Operational Data, US Nuclear Regulatory Commission
Platz O (1984) A Markov model for common-cause failures. Reliab Eng 9:25–31
Pozsgai P, Neher W, Bertsche B (2003) Models to consider load-sharing in reliability calculation and simulation of systems consisting of mechanical components. In: Reliability and maintainability symposium annual IEEE, pp 493–499
Rahmati M, Alavi SR, Sedaghat A (2016) Thermal performance of natural draft wet cooling towers under cross-wind conditions based on experimental data and regression analysis. In: 6th conference on thermal power plants (CTPP). IEEE, pp 1–5
Ram M, Nagiya K (2016) Performance evaluation of mobile communication system with reliability measures. Int J Qual Reliab Manag 33:430–440
Rausand M, Høyland A (2004) System reliability theory: models, statistical methods, and applications, vol 396. Wiley, New York
Shao J, Lamberson LR (1991) Modeling a shared-load k-out-of-n: G system. IEEE Trans Reliab 40:205–209
Sharifi M, Memariani A, Noorossanah R (2009) Real time study of a k-out-of-n system: n identical elements with increasing failure rates. Iran J Oper Res 1:56–67
Sridharan V (2006) Availabilty and MTTF of a system with one warm standby component. Appl Sci 8:167–171
Troffaes M, Gledhill J, Škulj D, Blake S (2015) Using imprecise continuous time Markov chains for assessing the reliability of power networks with common cause failure and non-immediate repair
Wang K-H, Dong W-L, Ke J-B (2006) Comparison of reliability and the availability between four systems with warm standby components and standby switching failures. Appl Math Comput 183:1310–1322
Yen T-C, Wang K-H, Chen W-L (2013) Comparative analysis of three systems with imperfect coverage and standby switching failures. In: The fifth international conference on advances in future internet, Barcelona, Spain, (AFIN 2013)
Yun WY, Cha JH (2010) A stochastic model for a general load-sharing system under overload condition. Appl Stoch Models Bus Ind 26:624–638
Yusuf I, Hussaini N (2012) Evaluation of reliability and availability characteristics of 2-out of-3 standby system under a perfect repair condition. Am J Math Stat 2:114–119
Yusuf I, Yusuf B, Bala SI (2014) Mean time to system failure analysis of a linear consecutive 3-out-of-5 warm standby system in the presence of common cause failure. J Math Comput Sci 4:58–66
Zheng X, Yamaguchi A, Takata T (2013) α-Decomposition for estimating parameters in common cause failure modeling based on causal inference. Reliab Eng Syst Saf 116:20–27
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Mortazavi, S.M., Karbasian, M. & Goli, S. Evaluating MTTF of 2-out-of-3 redundant systems with common cause failure and load share based on alpha factor and capacity flow models. Int J Syst Assur Eng Manag 8, 542–552 (2017). https://doi.org/10.1007/s13198-016-0553-9
Received:
Revised:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s13198-016-0553-9