
Abstract
In this study, we investigate two kinds of SIS epidemic models with an age structure and spatial heterogeneity. The first is the SIS epidemic model with age and patch structures, and the second is the SIS epidemic model with age structure and spatial diffusion. For both models, we prove that the global attractivity of each equilibrium is completely determined by the basic reproduction number \(R_0\); that is, the disease-free equilibrium is globally attractive if \(R_0<1\), whereas the endemic equilibrium uniquely exists and is globally attractive if \(R_0>1\). In particular, we provide a theoretical justification for the basic reproduction number being the spectral radius of the next generation operator. This enables us to perform numerical simulations that verify our theoretical results, which is important from the viewpoint of applications.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Since the pioneering work of Kermack and McKendrick [19], mathematical models of epidemics have been studied by many researchers. The SIS epidemic model is one of the most basic epidemic models, and assumes that recovered individuals become susceptible again immediately without immunity (see, e.g., Diekmann and Heesterbeek [8]). Many kinds of SIS epidemic models have been studied by researchers (see, e.g., [2,3,4, 10,11,12,13, 20, 24,25,26, 28, 29, 31, 33, 37, 38]).
In this paper, as an additional structure of the system, we focus on the spatial heterogeneity of the population. This is a key factor in considering the geographical spread of infectious diseases (see, e.g., [32]). We are concerned with two kinds of spatial heterogeneity: the patch structure and spatial diffusion. In models with the patch structure, each region is regarded as a patch and individuals can move between patches (see, e.g., [2, 13, 37]). In contrast, models with spatial diffusion allow individuals to move to adjacent positions through a random walk process (see, e.g., [3, 31, 38]). Therefore, patch structure models are suitable for the global spread of diseases through transportation such as airplanes, whereas spatial diffusion models are suitable for diseases like rabies, which are spread by wild vectors (see, e.g., [18]).
In this paper, we consider SIS epidemic models with an age structure and the aforementioned spatial heterogeneity, which are generalizations of the model studied in [4]. To the best of our knowledge, relatively few studies have considered epidemic models with both an age structure and spatial heterogeneity. In [28], Langlais and Busenberg studied an SIS epidemic model with an age structure, spatial diffusion, and time periodicity. They proved that if a nontrivial endemic equilibrium (or a periodic solution) exists, then it is globally stable; however, the threshold condition for the existence of such an endemic equilibrium was not obtained. In [21], Kim studied an SIS epidemic model with an age structure and spatial diffusion. The model was discretized using the Galerkin method and the backward Euler method, and the nontrivial endemic equilibrium was shown to be globally asymptotically stable when it exists. However, similar to [28], the threshold condition for the existence of such an endemic equilibrium was not obtained. In [9], Ducrot studied an SI epidemic model with an age structure and spatial diffusion, and proved the existence of travelling waves. In this model, the transmission rate was normalized to 1 and assumed to be independent of age, and the infected individuals could only give birth to infective children. In [25], Kuniya and Oizumi studied an SIS epidemic model with an age structure and spatial diffusion. They obtained the threshold condition for the existence of the endemic equilibrium by using the Feynman–Kac formula from probability theory. However, the global stability of such an endemic equilibrium was not proven.
The purpose of this study is to investigate the global asymptotic behavior of solutions to two kinds of SIS epidemic models with an age structure and spatial heterogeneity. As mentioned above, one is the SIS epidemic model with age and patch structures, and the other is the SIS epidemic model with an age structure and spatial diffusion. For both models, we use the monotone dynamical system approach developed by Busenberg et al. [4] to prove that the global attractivity of each equilibrium is completely determined by a threshold value: the disease-free equilibrium is globally attractive if the threshold value is less than 1, whereas the endemic equilibrium uniquely exists and is globally attractive if the threshold value is greater than 1. In particular, we show that this threshold value is a surrogate index of the basic reproduction number, which is defined by the spectral radius of the next generation operator. This is a naturally expected result, but it has never been stated with respect to the monotone dynamical system method. By virtue of this perspective, we can perform numerical simulations to verify the validity of our theoretical results, which is an important improvement in terms of applications.
The organization of this paper is as follows: In Sect. 2, we summarize the general monotone dynamical system approach that we will use in the analysis. In Sect. 3, we first formulate the SIS epidemic model with age and patch structures. Next, we define the monotone and concave semiflow using the approach in [4]. We then prove the existence and uniqueness of the endemic equilibrium when the threshold value is greater than 1. Finally, we investigate the global attractivity of each equilibrium in terms of the threshold value and show that the threshold value can be replaced by the basic reproduction number. In Sect. 4, we formulate the SIS epidemic model with an age structure and spatial diffusion and perform a similar analysis as in Sect. 3. In Sect. 5, we conduct numerical simulations to illustrate the validity of our theoretical results. In Sect. 6, we summarize our results and discuss future problems.
2 Monotone dynamical system approach
First, we summarize a monotone dynamical system approach to solve the global stability problem for structured population dynamics [4]. Let E be a Banach lattice and \(E_+\) be its positive cone. Let z(t) be a population vector that takes a value in a closed convex subset \(C \subset E_+\). Suppose that the dynamics of the population vector z(t) are written as a semilinear Cauchy problem:
where A is a linear operator describing the survival process and F is a nonlinear perturbation describing the production of new individuals. We assume that the differential operator A is the infinitesimal generator of a strongly continuous positive semigroup \(\{ \mathrm {e}^{tA} \}_{t \ge 0}\) on E that satisfies
In addition, we assume that there exists a positive constant \(\alpha >0\) such that
Furthermore, we assume that the following monotonicity and concavity hold:
where I denotes the identity operator.
The basic Eq. (2.1) can then be rewritten as a positively perturbed equation:
and hence, its mild solution can be obtained as a solution of the integral equation
Under conditions (2.2)–(2.6), we can adopt a positive iterative procedure to obtain the following lemma (see the proof of Theorem 3.2 in [4]).
Lemma 2.1
Suppose that (2.2)–(2.6) hold. The mild solution of (2.7) is given as \(z(t)=U(t) z_0\), where \(\{ U(t)\}_{t\ge 0}\) is the nonnegative semiflow satisfying the following monotonicity and concavity:
In particular, if \(z_0\) belongs to the domain of A, then \(z(t)=U(t) z_0\) becomes the global classical solution for the original Eq. (2.1).
The positively perturbed Eq. (2.7) is also useful for showing the existence of a positive equilibrium. Let \(z^*\) denote an equilibrium. Then, we have
Because \(-\left( A-(1/\alpha ) I \right) \) is positively invertible, we have the fixed point equation for \(z^*\):
where \(\varPhi \) is a positive nonlinear operator preserving the invariance of the subset C. If \(\varPhi \) has a positive fixed point, it gives a positive equilibrium of the basic system (2.1). Define the linearized operator at the origin as:
where \(F'[\mathbf {0}]\) is the Fréchet derivative of the operator F at the origin. The existence of a fixed point of \(\varPhi \) for \(r(K_\alpha ) > 1\) will be proved by constructing a monotone bounded sequence. The uniqueness of the positive fixed point will be proved by using a strong concave property of \(\varPhi \) [15].
Even when the existence and uniqueness of such a positive equilibrium \(z^* \in C {\setminus } \{ \mathbf {0} \}\) of Eq. (2.1) are guaranteed, it is not necessarily easy to show the global stability of the unique steady state. However, if there exists a maximal point \(z_\dagger \in C\) such that \(z \le z_\dagger \) for all \(z \in C\) and U(t) is eventually \(z^*\)-positive, that is, there exist positive constants \(\xi \in (0,1)\) and \(t_0 > 0\) such that
then it is easy to show the global attractivity of \(z^*\). In fact, we have the following lemma.
Lemma 2.2
Suppose that (2.1) has the unique positive equilibrium \(z^* \in C {\setminus } \{ \mathbf {0} \}\), there exists a maximal point \(z_\dagger \in C\), and U(t) is eventually \(z^*\)-positive. Then, \(z^*\) is globally attractive.
Proof
As U(t) is eventually \(z^*\)-positive, (2.11) holds. It then follows from the monotonic and concave properties (2.8) and (2.9) of the semiflow that
Hence, we can construct a nondecreasing sequence \(\{ U(t)^n \xi z^* \}_{n=0}^{+\infty }\) and a nonincreasing sequence \(\{ U(t)^n z_\dagger \}_{n=0}^{+\infty }\), both of which are bounded and converge to the unique \(z^*\). Consequently, \(U(t)U(t_0)z_0 = U(t+t_0) z_0\) also converges to \(z^*\) as \(t\rightarrow +\infty \). \(\square \)
As shown above, we can use the spectral radius \(r(K_\alpha )\) of the operator \(K_\alpha \) as the threshold value for the global attractivity of the positive equilibrium \(z^*\). As \(K_\alpha = \left( I - \alpha A\right) ^{-1} \left( I + \alpha F'[\mathbf {0}] \right) \), the spectral radius \(r(K_\alpha )\) depends on the choice of \(\alpha \). However, this dependence does not affect the threshold property of \(K_\alpha \). To see this fact, let us introduce the next generation operator (NGO) for our basic system as follows [16]: \(K := F'[\mathbf {0}] \left( -A \right) ^{-1}\). The basic reproduction number is given by its spectral radius:
For epidemic models, \(R_0\) can be interpreted as the expected number of newly infected individuals produced by a typical infected individual during its entire period of infectiousness in a fully susceptible population (see, e.g., [8, 16]). We have the following lemma.
Lemma 2.3
Let \(K_\alpha \) and \(R_0\) be defined by (2.10) and (2.12), respectively.
which implies that the threshold property of \(K_\alpha \) is independent of the choice of \(\alpha \).
Proof
In the linearized system at the trivial steady state, \(R_0 = r(K)\) denotes the per generation asymptotic growth factor and, if the spectral mapping theorem holds, the spectral bound \(\omega (A+ F'[\mathbf {0}])\) of the linearized generator gives the Malthusian parameter (asymptotic exponential growth rate) of the infective population. From the renewal theorem, the following sign relation holds [16, 35]:
By applying similar ideas to the perturbed operator \(A-I/\alpha + \left( I + \alpha F'[\mathbf {0}] \right) /\alpha \), we have the following relation:
As the right-hand sides of (2.14) and (2.15) are the same, we have (2.13). \(\square \)
In summary, we can expect that if \(R_0 > 1\), then the basic system has a unique positive equilibrium \(z^* \in C {\setminus } \left\{ \mathbf {0} \right\} \) that attracts all solutions \(z(t)=U(t)z_0\) with the nontrivial initial datum \(z_0 \in C {\setminus } \{ \mathbf {0} \}\); that is, \(U(t)z_0 \rightarrow z^* \ \mathrm {in} \ E\) as \(t \rightarrow +\infty \), whereas \(U(t)z_0 \rightarrow 0\) as \(t \rightarrow +\infty \) if \(R_0<1\). In the following, we apply the above general recipe to two age-structured SIS epidemic models with spatial heterogeneity.
3 SIS epidemic model with age and patch structures
3.1 Model formulation
In this section, we are concerned with the SIS epidemic model with age and patch structures. Let \(n \in \mathbb {N}\) be the number of patches and let \({\mathscr {N}} := \{ 1,2,\ldots , n \}\). Let \(P_j(t,a)\) be the population of age \(a \in [0, a_\dagger ]\) at time \(t \ge 0\) in patch \(j \in {\mathscr {N}}\), where \(a_\dagger \in (0, +\infty )\) denotes the maximum attainable age of individuals. For \(j \in {\mathscr {N}}\), let \(\mu _j(a)\) and \(\beta _j(a)\) be the age-specific mortality rate and birth rate in patch j, respectively. For \(j,k \in {\mathscr {N}}\) such that \(j \ne k\), let \(m_{jk}(a)\) be the age-specific migration rate from patch k to patch j. We assume that the population in each patch j obeys the following Lotka–McKendrick system:
For simplicity, we use the vector and matrix representation
where \(\mathrm{T}\) denotes the transpose operation and \(m_{jj}(a) := -\mu _j(a) - \sum _{k \ne j} m_{kj}(a)\), \(j \in {\mathscr {N}}\). Then, (3.1) can be rewritten as follows:
In this paper, we assume that the population is in the demographic steady state. For this purpose, we make the following assumptions:
- (A1):
-
\(\mu _j (\cdot ) \in L^1_{\mathrm {loc},+} (0,a_\dagger )\) and \(\int _0^{a_\dagger } \mu _j (a) \mathrm {da} = +\infty \) for all \(j\in {\mathscr {N}}\);
- (A2):
-
\(m_{jk}(\cdot ) \in L^{\infty }_+ (0,a_\dagger )\) for all \(j,k \in {\mathscr {N}}\) such that \(j \ne k\);
- (A3):
-
\(\beta _{j}(\cdot ) \in L^{\infty }_+ (0,a_\dagger )\) for all \(j \in {\mathscr {N}}\);
- (A4):
-
The net reproduction matrix \(\int _0^{a_\dagger } M(a) L(a) \mathrm {d}a\) is irreducible and its Frobenius root is 1, where L(a) denotes the survival matrix such that \(\mathrm {d} L(a)/ \mathrm {d}a = M(a) L(a)\) and L(0) is equal to the identity matrix.
Under (A1)–(A4), we see from Propositions 3.2, 3.3, and 4.2 in Inaba [14] that (3.2) has a positive demographic steady state \(P^*(a) := (P_1^*(a), P_2^*(a), \cdots , P_n^*(a))^{\mathrm{T}}\), which satisfies
It has been shown [14, 17] that \(P^*\) is globally asymptotically stable with intrinsic growth rate 0. Therefore, in the following, we assume that the demographic steady state has already been reached at \(t=0\), so \(P(t,a) \equiv P^*(a)=L(a) b^*\) for all \(t>0\), where \(b^*\) denotes the positive eigenvector (the birth rate vector at the steady state) corresponding to the eigenvalue 1 of the net reproduction matrix \(\int _0^{a_\dagger } M(a) L(a) \mathrm{d}a\).
In this paper, we focus on an infectious disease such that recovered individuals do not have immunity and remain susceptible. For instance, some sexually transmitted diseases such as gonorrhea have this characteristic. Such a disease can be modeled by the SIS epidemic model (see, for instance, [26]). Let \(S_j(t,a)\) and \(I_j(t,a)\) be the susceptible and infective populations, respectively, of age \(a \in [0,a_\dagger ]\) at time \(t \ge 0\) in patch \(j \in {\mathscr {N}}\). We assume that the population is divided into these two classes: \(P_j^*(a) \equiv S_j(t,a) + I_j(t,a)\), \(j \in {\mathscr {N}}\). For \(j \in {\mathscr {N}}\), let \(\lambda _j(t,a)\) be the force of infection to susceptible individuals of age a at time t, and let \(\gamma _j (a)\) be the age-specific recovery rate. We assume that \(\lambda _j(t,a)\) is given by the following integral:
where \(\kappa _j (a,\sigma )\) denotes the age-specific disease transmission coefficient. The main model in this section is formulated as the following SIS epidemic model with age and patch structures:
Note that the disease-induced death and reduction of the migration rate are not considered in (3.3). As stated in [1, Sect. 3.3], these assumptions would be suitable for mild diseases. In particular, some sexually transmitted diseases such as gonorrhea are thought to be suitable for (3.3). Furthermore, note that our model (3.3) is different from the multi-group SIS epidemic model studied in [10], which considers the interaction of individuals in different groups in the force of infection term, but does not allow the movement of individuals between groups. We make the following assumption:
- (A5):
-
\(\gamma _j(\cdot ) \in L^{\infty }_+ (0,a_\dagger )\) and \(\kappa _j(\cdot ,\cdot ) \in L^{\infty }_+ ((0,a_\dagger ) \times (0,a_\dagger ))\) for all \(j \in {\mathscr {N}}\).
In the following, we consider the normalization of the solution of system (3.3):
As \(s_j(t,a)=(P_j^*(a)-I_j(t,a))/P_j^*(a)=1-i_j(t,a)\), we can rewrite (3.3) as follows:
Here,
In fact,
and we obtain (3.4). We make the following technical assumption:
- (A6):
-
\(\bar{m}_{jk} (\cdot ) \in L_+^\infty (0,a_\dagger )\) for all \(j, k \in {\mathscr {N}}\) such that \(j \ne k\).
For example, (A6) is satisfied if the migration rate is zero at the left neighborhood of the maximum attainable age \(a_\dagger \), or if \(m_{jk}(a)\) is proportional to \(P_j^*(a)\).
3.2 Definition of the semiflow
To apply the monotone dynamical system approach of Busenberg et al. [4] (see Sect. 2), we define the semiflow generated by (3.4). Let \(E:=L^1 \left( 0,a_\dagger ; {\mathbb {R}}^n \right) \), \(E_+:=L^1_+ \left( 0,a_\dagger ; {\mathbb {R}}^n \right) \) and let C be the state space for system (3.4) defined as follows:
To rewrite (3.4) into an abstract Cauchy problem in E, we define the following two operators:
where
The system (3.4) can then be rewritten in the following abstract form in E:
where \(i(t)=\left( i_1(t),i_2(t),\cdots , i_n (t) \right) ^{\mathrm{T}}\) and \(i_0 = \left( i_{1,0},i_{2,0},\cdots , i_{n,0} \right) ^{\mathrm{T}}\).
We are now in a position to show that (3.7) defines the semiflow \(\{ U(t) \}_{t\ge 0}\) such that \(i(t)=U(t)i_0\), which satisfies the following monotonicity and concavity:
Proposition 3.1
Let C be defined by (3.5). The abstract Cauchy problem (3.7) has the global classical solution \(i(t) \in C\) for any \(i_0 \in C \cap D(A)\). Furthermore, it defines the positive semiflow \(\{ U(t) \}_{t \ge 0}\) satisfying (3.8) and (3.9).
Proof
It is easy to see that the operator A defined by (3.6) generates the following \(C_0\)-semigroup \(\{ \mathrm {e}^{tA} \}_{t\ge 0}: E \rightarrow E\):
Then, it is easy to see that \(\mathrm{e}^{tA}(C) \subset C\) and \(\mathrm{e}^{tA}\varphi \le \mathrm{e}^{tA} \psi \) for all \(\varphi , \psi \in C\) such that \(\varphi \le \psi \). For any positive constant \(\alpha >0\), the resolvent \(\left( I -\alpha A \right) ^{-1}: E \rightarrow E\) is given as follows:
Hence, for all \(\varphi , \psi \in C\) such that \(\varphi \le \psi \), it holds that
Let \(\alpha > 0\) satisfy the following inequality:
where \(\lambda _j^+\), \(\gamma _j^+\) (\(j\in {\mathscr {N}}\)) and \(\bar{m}_{jk}^+\) (\(j,k \in {\mathscr {N}}\), \(j\ne k\)) denote the essential positive upper bounds for the respective functions, the existence of which follows from (A5) and (A6). For any \(\varphi , \psi \in C\) such that \(\varphi \le \psi \), we have
That is, \(I +\alpha F\) is a monotone operator. For any \(\varphi \in C\) and \(\xi \in (0,1)\), we have
That is, (2.6) in Sect. 2 holds. For any \(\varphi \in C\), we have
These inequalities imply that \((I-\alpha A)^{-1}(C) \subset C\) and \((I+\alpha F)(C) \subset C\), and hence, (2.3) holds. Consequently, from Lemma 2.1, we see that the abstract Cauchy problem (3.7) has the global classical solution \(i(t) \in C\) for any \(i_0 \in C \cap D(A)\), and it defines the semiflow \(\{ U(t) \}_{t \ge 0}\) satisfying (3.8) and (3.9). This completes the proof. \(\square \)
3.3 Existence and uniqueness of the endemic equilibrium
Let \(i^* =(i_1^*, i_2^*, \cdots , i_n^*)^{\mathrm{T}} \in C\) denote the equilibrium of the basic system (3.4). From (3.7), it satisfies the following equality:
By using the positive constant \(\alpha > 0\) as in the proof of Proposition 3.1, we can rewrite the above equality as follows (see also Sect. 2):
Hence, regarding the existence of the endemic equilibrium, we can restrict our attention to the fixed point problem of the operator \(\varPhi =(I-\alpha A)^{-1}(I+\alpha F)\). From the proof of Proposition 3.1, we see that \(\varPhi (C) \subset C\) and \(\varPhi (\varphi ) \le \varPhi (\psi )\) for all \(\varphi , \psi \in C\) such that \(\varphi \le \psi \). Let \(\varPhi '[\mathbf {0}]:=K_\alpha =(I-\alpha A)^{-1}(I+\alpha F'[\mathbf {0}])\) be the Fréchet derivative of \(\varPhi \) at the origin, where \(F'[\mathbf {0}]: E \rightarrow E\) is the Fréchet derivative of F at the origin:
We expect the spectral radius \(r(K_\alpha )\) of the operator \(K_\alpha \) to play the role of the threshold value for the existence of the nontrivial fixed point of \(\varPhi \) (see also Sect. 2). In fact, we prove the following proposition.
Proposition 3.2
Let C and \(K_\alpha \) be defined by (3.5) and (3.11), respectively. If \(r (K_\alpha ) > 1\), then system (3.4) has at least one endemic equilibrium \(i^* \in C {\setminus } \left\{ \mathbf {0} \right\} \).
Proof
As the operator \(K_\alpha \) is linear, positive, and completely continuous, it follows from the Krein–Rutman theorem [22] that there exists a positive eigenfunction \(\varphi ^* \in E_+ {\setminus } \left\{ \mathbf {0} \right\} \) corresponding to \(r (K_\alpha ) > 1\). Without loss of generality, we can assume that \(\varphi ^* \in C\). For any \(\xi \in (0,1)\), we have
where \(\bar{\lambda }:= \max _{j \in {\mathscr {N}}} \lambda _j^+\). In addition, we have
where \(\bar{\gamma } := \max _{j \in {\mathscr {N}}} \left( \gamma _j^+ + \sum _{k\ne j} \bar{m}_{jk}^+ \right) > 0\). From the choice of \(\alpha \) in (3.10), we see that \(1-\alpha \bar{\gamma } > 0\), and hence, we have
As \(r(K_\alpha ) > 1\), we can assume that \(\xi \in (0,1)\) is sufficiently small that
From (3.13), (3.14), and (3.15), we have
Hence, from the monotonicity of \(\varPhi \), we can construct a monotone nondecreasing sequence \(\left\{ \varPhi ^n (\xi \varphi ^*) \right\} _{n=0}^{+\infty } \). As \(\varPhi (C) \subset C\), this sequence is bounded, and hence, there exists a \(\varphi ^\infty \in C {\setminus } \{ \mathbf {0} \}\) such that \(\varPhi (\varphi ^\infty ) = \varphi ^\infty \). This is the desired fixed point of \(\varPhi \), that is, the endemic equilibrium \(i^* \in C {\setminus } \{ \mathbf {0} \}\) of system (3.4). This completes the proof. \(\square \)
Next, we prove the uniqueness of the endemic equilibrium \(i^* =(i_1^*, i_2^*, \cdots , i_n^*)^{\mathrm{T}} \in C {\setminus } \left\{ \mathbf {0} \right\} \). We see from (3.4) that it satisfies the following system of ordinary differential equations:
For the uniqueness of the endemic equilibrium \(i^*\), we make the following additional assumption:
- (A7):
-
There exist \(\kappa _j^- \in L_+^\infty (0,a_\dagger )\) for all \(j \in {\mathscr {N}}\) such that \(\kappa _j (a,\sigma ) \ge \kappa _j^-(\sigma ) > 0\) for all \(a,\sigma \in \left( 0,a_\dagger \right) \).
Under assumption (A7), we have the following inequality for all \(\varphi \in E_+ {\setminus } \{ \mathbf {0} \}\):
Using (3.17), we prove the following lemma:
Lemma 3.1
Let C be defined by (3.5) and \(i^* \in C {\setminus } \left\{ \mathbf {0} \right\} \) be an endemic equilibrium of system (3.4). For any \(\xi \in \left( 0,1 \right) \) and \(v \in C {\setminus } \left\{ \mathbf {0} \right\} \), there exists a positive functional \(c(v) >0\) such that \(\varPhi \left( \xi i^* + v \right) (a) \ge \xi i^*(a) + c(v) a\).
Proof
For any \(\xi \in \left( 0,1 \right) \) and \(v \in C {\setminus } \left\{ \mathbf {0} \right\} \), we have
Hence, it follows from the monotonicity of \(\left( I-\alpha A \right) ^{-1}\) that
where \(\underline{\lambda } (v) := \min _{j \in {\mathscr {N}}} \lambda ^-_j (v)\). Therefore, by letting \(c(v) :=\left( 1-\xi \right) \) \(\mathrm {e}^{-\frac{1}{\alpha } a_\dagger } \underline{\lambda }(v) \), the proof is complete. \(\square \)
Using Lemma 3.1, we prove the following proposition on the uniqueness of the endemic equilibrium \(i^* \in C {\setminus } \{ \mathbf {0} \}\) of (3.4).
Proposition 3.3
Let C be defined by (3.5). System (3.4) has at most one endemic equilibrium \(i^* \in C {\setminus } \left\{ \mathbf {0} \right\} \).
Proof
The first equation in (3.16) can be rewritten as
Hence, from (3.17), we have
Integrating this expression, we have
Suppose that there exists another endemic equilibrium \(j^* = (j_1^*, j_2^*, \cdots , j_n^* )^{\mathrm{T}} \in C {\setminus } \left\{ \mathbf {0} \right\} \) of system (3.4). From inequality (3.18), we have
This implies that there exists some \(\xi \in (0,1)\) such that \(i^* \ge \xi j^*\). Let \(\eta := \sup \{ \xi \in {\mathbb {R}}_+: i^* \ge \xi j^* \}\) and suppose that \(\eta \in (0,1)\). From the monotonicity of \(\varPhi \) and inequalities (3.17) and (3.18), we have
Regarding the last term on the right-hand side of this inequality as v in Lemma 3.1, we see that there exists some \(c(v) >0\) such that \(\varPhi \left( \eta j^* + v \right) (a) \ge \eta j^* (a) + c(v) a\). Hence, projecting \(\varPhi \) on both sides, we have
where \(\bar{\lambda } := \max _{j \in {\mathscr {N}}} \lambda _j^+\) and \(\bar{m}:= \max _{j \in {\mathscr {N}}} \sum _{k \ne j} \bar{m}_{jk}^+\). Recalling that \(i^* = \varPhi (i^*)\), we have
which contradicts the definition of \(\eta \). Therefore, \(\eta \ge 1\) and we have \(i^* \ge \eta j^* \ge j^* \). Exchanging the roles of \(i^*\) and \(j^*\), we can show that \(j^* \ge i^* \) in a similar way. Consequently, we have \(i^* = j^* \) and the proof is complete. \(\square \)
3.4 Global attractivity of equilibria
From (3.7) and (3.12), we have the following differential inequality:
When \(r(K_\alpha ) < 1\), as stated in Sect. 2, we have that \(\omega (A+F'[\mathbf {0}]) < 0\), where \(\omega (\cdot )\) denotes the spectral bound of an operator that is equal to the asymptotic exponential growth rate. Therefore, from (3.19), we see that \(U(t)i_0 \rightarrow \mathbf {0}\) in E as \(t \rightarrow +\infty \), that is, the disease-free equilibrium \(\mathbf {0}\) is globally attractive. Consequently, we have the following proposition.
Proposition 3.4
Let C and \(K_\alpha \) be defined by (3.5) and (3.11), respectively. If \(r (K_\alpha ) < 1\), then the disease-free equilibrium \(\mathbf {0}\) of system (3.4) is globally attractive in C.
Next, we investigate the global attractivity of the endemic equilibrium \(i^* \in C {\setminus } \{ \mathbf {0} \}\) when \(r (K_\alpha ) > 1\). We prove the following lemma.
Lemma 3.2
Let C be defined by (3.5) and suppose that system (3.4) has the unique endemic equilibrium \(i^* \in C {\setminus } \{ \mathbf {0} \}\). Then, U(t) is eventually \(i^*\)-positive, that is, there exist positive constants \(\xi \in (0,1)\) and \(t_0 > 0\) such that
provided that \(i_0 \in C {\setminus } \{ \mathbf {0} \}\).
Proof
By integrating the first equation in (3.4) along the characteristic line \(t-a=\mathrm {const.}\), we have
It suffices to consider the case where \(t>a_\dagger \). From the second case of the above equation, we have
Let \(t_0 > a_\dagger \). As \(i_0 \in C {\setminus } \{ \mathbf {0} \}\), it follows from (3.17) and the continuity that
Hence, from (3.18) and (3.21), we have
which implies the existence of a sufficiently small \(\xi \in (0,1)\) such that (3.20) holds. This completes the proof. \(\square \)
From Lemma 3.2, we can apply Lemma 2.2 to obtain the following proposition.
Proposition 3.5
Let C be defined by (3.5) and suppose that system (3.4) has the unique endemic equilibrium \(i^* \in C {\setminus } \{ \mathbf {0} \}\). Then, \(i^*\) is globally attractive in \(C {\setminus } \{ \mathbf {0} \}\).
Consequently, from Propositions 3.2, 3.3, and 3.5, we have the following proposition.
Proposition 3.6
Let C and \(K_\alpha \) be defined by (3.5) and (3.11), respectively. If \(r (K_\alpha ) > 1\), then system (3.4) has the unique endemic equilibrium \(i^* \in C {\setminus } \{ \mathbf {0} \}\) and it is globally attractive in \(C {\setminus } \{\mathbf {0}\}\).
Finally for this section, we show the relationship between \(r(K_\alpha )\) and the basic reproduction number \(R_0\), which is defined by
From Lemma 2.3, we have \(\mathrm {sign}(R_0 -1) = \mathrm {sign} (r(K_\alpha ) -1)\). Consequently, from Propositions 3.4 and 3.6, we have the following main theorem of this section.
Theorem 3.1
Let C and \(R_0\) be defined by (3.5) and (3.22), respectively.
-
(i)
If \(R_0 < 1\), then the disease-free equilibrium \(\mathbf {0}\) of system (3.4) is globally attractive in C.
-
(ii)
If \(R_0 > 1\), then system (3.4) has the unique endemic equilibrium \(i^* \in C {\setminus } \{ \mathbf {0} \}\) and it is globally attractive in \(C {\setminus } \{ \mathbf {0} \}\).
4 The SIS epidemic model with age structure and spatial diffusion
4.1 Model formulation
In this section, we are concerned with the SIS epidemic model with an age structure and spatial diffusion. Let \(\varOmega \subset {\mathbb {R}}^n, \ n \in \mathbb {N}\) be a bounded domain with a smooth boundary \(\partial \varOmega \). Let P(t, a, x) be the population of age \(a \in [0,a_\dagger ]\) at time \(t\ge 0\) in position \(x \in \varOmega \), where \(a_\dagger \in (0,+\infty )\) denotes the maximum attainable age, as in the previous section. Let \(\mu (a)\) and \(\beta (a)\) be the age-specific mortality rate and birth rate, respectively. Let \(d > 0\) be the diffusion coefficient. In this section, we assume that the population obeys the following differential equation:
where \(\mathbf {n}\) denotes the outward unit normal vector on \(\partial \varOmega \). This is a stable population model with diffusion, as studied by Marcati and Serafini [30]. For the demographic coefficients, we make the following assumptions:
- (B1):
-
\(\mu \in L^1_{\mathrm {loc},+}(0,a_\dagger )\) and \(\int _0^{a_\dagger } \mu (a) \mathrm {d}a = +\infty \);
- (B2):
-
\(\beta \in L_+^\infty (0,a_\dagger )\) and \( \int _0^{a_\dagger } \beta (a) \mathrm {e}^{-\int _0^a \mu (\sigma ) \mathrm {d}\sigma } \mathrm {d}a =1. \)
Under assumption (B2), it is easy to see that Eq. (4.1) has a spatially homogeneous positive equilibrium \(P^* (a) = P^*(0) \mathrm {e}^{-\int _0^a \mu (\sigma ) \mathrm {d}\sigma }\) (where we can regard \(P^* (0)\) as an arbitrary constant). As in Sect. 3, we assume in the following that such a demographic steady state has already been reached at \(t=0\), that is, \(P(t,a,x) \equiv P^*(a)\).
Let S(t, a, x) and I(t, a, x) denote the susceptible and infective populations, respectively, of age \(a \in [0,a_\dagger ]\) at time \(t \ge 0\) in position \(x \in \varOmega \). Let \(\lambda (t,a,x)\) be the force of infection to susceptible individuals of age a at time t in position x and let \(\gamma (a)\) be the age-specific recovery rate. We assume that \(\lambda (t,a,x)\) is given by the following integral:
where \(\kappa (a,\sigma ,x,y)\) denotes the coefficient of disease transmission between \(S (\cdot ,a,x)\) and \(I(\cdot ,\sigma ,y)\). The main model in this section is formulated as the following SIS epidemic model with age structure and spatial diffusion:
Note that we assumed in (4.2) that the diffusion coefficient d is common for susceptible and infective individuals. As stated in Sect. 3, this kind of assumption would be suitable for some mild diseases. We make the following assumption:
- (B3):
-
\(\gamma \in L_+^\infty \left( 0,a_\dagger \right) \) and \(\kappa \in L_+^\infty \left( (0,a_\dagger )^2 \times \varOmega ^2 \right) \).
In this study, we assume that the state space of the vector-valued functions \(S(t,\cdot ,\cdot )\) and \(I(t,\cdot ,\cdot )\) is a Bochner space \({\mathscr {E}}:=L^1 ([0,a_\dagger ], {\mathscr {X}})\) equipped with the norm
where \({\mathscr {X}}:=C\left( \overline{\varOmega } \right) \) with supremum norm \(|\cdot |_{\mathscr {X}}\). Let \({\mathscr {E}}_+ := L^1_+([0,a_\dagger ], {\mathscr {X}})\) denote the positive cone of \({\mathscr {E}}\).
As in Section 3, we consider the normalization of the solution of system (4.2):
As \(s(t,a,x) \equiv 1-i(t,a,x)\), system (4.2) can be rewritten as the following equation in i:
where
and
4.2 Definition of the semiflow
We give the state space for Eq. (4.3) as the following closed convex set:
In the following, we consider problem (4.3) as an abstract equation in \({\mathscr {E}}\). Formally, (4.3) can be seen as an abstract Cauchy problem in \({\mathscr {E}}\):
where
and the nonlinear perturbation \({{\mathscr {F}}}\) is defined by
Here, the force of infection is given as a linear operator:
First, we give a precise definition of the operator \({\mathscr {A}}\). Let \(\left\{ V(a,\sigma ) \right\} _{a \ge \sigma \ge 0}\) be an evolutionary system given by
and the operator \(A(\cdot )\) be the generator of the evolutionary family \(V(a,\sigma )\), \(a\ge \sigma \ge 0\). Here, we define
and \(\left\{ {\mathscr {T}}(a) \right\} _{a \ge 0}\) is the heat semigroup on \({\mathscr {X}}\), which is generated by \(d\varDelta _x\). That is,
where \(p^N_d(a,x,y)\) denotes the Neumann heat kernel, which is the fundamental solution of
Note that \(p_d^N(a,x,y)\) is positive and continuous on \((0,a_\dagger ) \times \varOmega ^2\), and
(see, e.g., Choulli and Kayser [6, 7]). Moreover, we usually assume that \(\inf \gamma >0\), so the growth bound of the evolutionary system V is negative, that is, there exist \(M \ge 1\) and \(\epsilon >0\) such that \(\Vert V(a,\sigma )\Vert \le M e^{-\epsilon (a-\sigma )}\).
According to Thieme [34], we use the following definition.
Definition 4.1
Let \(\varphi , y \in {\mathscr {E}}\). Then, \(\varphi \in D({\mathscr {A}})\) and \(y={\mathscr {A}}\varphi \) if and only if
Then, the following characterization holds immediately [34, Corollary 1].
Lemma 4.1
Let \(\varphi , y \in {\mathscr {E}}\). Then, \(\varphi \in D({\mathscr {A}})\) and \(y={\mathscr {A}}\varphi \) if and only if \(\varphi (0)=0\) and
for almost all \(a \in (0, a_\dagger )\). Moreover, \({\mathscr {A}}\varphi (a)=-\varphi '(a)+A(a)\varphi (a)\) if \(\varphi \in D({\mathscr {A}})\).
Proof
Suppose that \(\varphi \in D({\mathscr {A}})\). Then, there exists some \(y \in {\mathscr {E}}\) such that \(\varphi (a)=-\int _{0}^{a}V(a,s)y(s)ds\). Let
Then, we have
where c is a suitable constant. Therefore, we have \(\lim _{h \downarrow 0} J(a)=0\). Conversely, if we assume (4.6) for \(\varphi \in {\mathscr {E}}\) with \(\varphi (0)=0\), it follows that
for almost all \(a \in (0,a_\dagger )\). Then, \(\varphi \in D({\mathscr {A}})\) and
which shows that \({\mathscr {A}}\varphi (a)=y(a)=(-d/da+A(a))\varphi (a)\). \(\square \)
From the above lemma, we can define \({\mathscr {A}}\) by
for \(\varphi \in D({\mathscr {A}})\) and almost all \(a \in (0,a_\dagger )\), and the linear operator \({\mathscr {A}}\) is the generator of the following Howland evolution semigroup \({\mathscr {S}}(t)\), \(t \ge 0\) [5]:
Now, we can show that the abstract Cauchy problem (4.5) generates a positive semiflow \(\{ {\mathscr {U}}(t) \}_{t \ge 0}\) such that \(i(t) = {\mathscr {U}}(t)i_0\) is the weak solution of (4.5) satisfying the concavity in (2.8) and (2.9).
Proposition 4.1
Let \({\mathscr {C}}\) be defined by (4.4). The abstract Cauchy problem (4.5) has the global classical solution \(i (t) \in {\mathscr {C}}\) for any \(i_0 \in {\mathscr {C}} \cap \mathscr {D}(\mathscr {A})\). Furthermore, it defines a positive semiflow \(\left\{ {\mathscr {U}}(t) \right\} _{t \ge 0}\) satisfying
Proof
As stated in Sect. 2, introducing a parameter \(\alpha >0\), we obtain a mild solution i(t) as a continuous solution of the variation of constants formula:
It is easy to see that \({\mathscr {S}}(t) \varphi \le {\mathscr {S}}(t) \psi \) for all \(\varphi , \psi \in {\mathscr {C}}\) such that \(\varphi \le \psi \). For any \(\varphi \in {\mathscr {C}}\), we have
for all \(t > 0\), \(a \in [0,a_\dagger ]\), and \(x \in \varOmega \). This implies that \({\mathscr {S}}(t)({\mathscr {C}}) \subset {\mathscr {C}}\). That is, (2.2) holds. For any positive constant \(\alpha >0\), the resolvent \(\left( I-\alpha {\mathscr {A}} \right) ^{-1}\) is calculated as follows:
Hence, we see that \(\left( I -\alpha {\mathscr {A}} \right) ^{-1} \varphi \le \left( I -\alpha {\mathscr {A}}\right) ^{-1} \psi \) for all \(\varphi , \psi \in {\mathscr {C}}\) such that \(\varphi \le \psi \). That is, (2.4) holds. From assumption (B3), the following inequality holds for any \(\varphi \in {\mathscr {C}}\):
where \(\kappa ^+:= \mathop {\mathrm {ess.sup}} \kappa (a,\sigma ,x,y)\) and \(|\varOmega |\) denotes the volume of \(\varOmega \). Choosing \(\alpha >0\) such that \(\alpha < 1/\lambda ^+\), we can then expect property (2.5) to hold, as in Busenberg et al. [4]. In fact, for any \(\varphi , \psi \in {\mathscr {C}}\) such that \(\varphi \le \psi \), we have
and hence, (2.5) holds. For any \(\varphi \in {\mathscr {C}}\) and \(\xi \in (0,1)\), we have
Hence, (2.6) holds. For any \(\varphi \in {\mathscr {C}}\), we have
and
These inequalities imply that \(\left( I-\alpha {\mathscr {A}} \right) ^{-1}({\mathscr {C}}) \subset {\mathscr {C}}\) and \(\left( I + \alpha {\mathscr {F}} \right) \) \(({\mathscr {C}}) \subset {\mathscr {C}}\), and hence, (2.3) holds. Consequently, from Lemma 2.1, we can conclude that the abstract problem (4.5) has the global classical solution \(i(t) \in {\mathscr {C}}\) provided \(i_0 \in {\mathscr {C}} \cap \mathscr {D}({\mathscr {A}})\), and it defines the positive semiflow \(\left\{ {\mathscr {U}}(t) \right\} _{t \ge 0}\) such that \(i(t) = {\mathscr {U}}(t) i_0\) satisfying (4.8) and (4.9). This completes the proof. \(\square \)
4.3 Existence and uniqueness of an endemic equilibrium
Next, we investigate the existence and uniqueness of each equilibrium \(i^* \in {\mathscr {C}}\) of Eq. (4.3). As stated in Sect. 2, we focus on the fixed point problem of the nonlinear operator \(\varPsi :=\left( I -\alpha {\mathscr {A}} \right) ^{-1} \left( I+\alpha \mathscr {F} \right) : {\mathscr {E}} \rightarrow {\mathscr {E}}\), where \(\alpha >0\) is a positive constant such that \(\alpha <1/\lambda ^+ \). It is easy to see that the trivial fixed point \(i^* = \mathbf {0} \in {\mathscr {C}}\) always exists and is the disease-free equilibrium. In the following, we restrict our attention to the nontrivial endemic equilibrium \(i^* \in {\mathscr {C}} {\setminus } \left\{ \mathbf {0} \right\} \). The Fréchet derivative \({\mathscr {K}}_\alpha : {\mathscr {E}} \rightarrow {\mathscr {E}}\) of \(\varPsi \) at \(\mathbf {0} \in {\mathscr {E}}\) is given by
As stated in Sect. 3, we can expect the spectral radius \(r ({\mathscr {K}}_\alpha )\) to determine the existence of the endemic equilibrium \(i^* \in {\mathscr {C}} {\setminus } \{ \mathbf {0} \}\). Before the proof, we make the following assumption:
- (B4):
-
There exists some \(\kappa ^- \in L^\infty _+((0,a_\dagger ) \times \varOmega )\) such that \(\kappa (a,\sigma ,x,y) \ge \kappa ^-(\sigma ,y) > 0\) for all \(a,\sigma \in (0,a_\dagger )\) and \(x,y \in \varOmega \).
Under assumption (B4), we have that, for any \(\varphi \in {\mathscr {E}}_+ {\setminus } \{ \mathbf {0} \}\),
In proving the existence of the endemic equilibrium \(i^*\) for \(r({\mathscr {K}}_\alpha ) > 1\), we need the complete continuity of the operator \({\mathscr {K}}_\alpha \) to apply the Krein–Rutman theorem. For this reason, we now prove the following proposition.
Proposition 4.2
Let X be a closed interval, and let F be a Banach space with norm \(|\cdot |_F\). Let \(\varPhi \) be a subset of the space of integrable functions \(E:=L^1(X,F)\) with norm \(\Vert f\Vert _E=\int _X|f(\tau )|_Fd\tau \). For \(\epsilon >0\) and \(a \in X\), define
where we adopt the convention that \(f(a)=0\) for \(a \notin X\). The set \(\varPhi \subset E\) is relatively compact if both of the following two assumptions are satisfied.
-
1.
For a given \(\epsilon >0\) and each \(a \in X\), the set \(\varPhi _\epsilon (a):=\{f_\epsilon (a): f \in \varPhi \}\) is relatively compact in F.
-
2.
$$\begin{aligned} \lim _{h \rightarrow 0}\int _{X}|f(a+h)-f(a)|_F \mathrm{d}a =0 \end{aligned}$$(4.14)
holds uniformly for \(f \in \varPhi \).
Proof
For a fixed \(\epsilon >0\), \(\varPhi _\epsilon :=\{ f_\epsilon : f \in \varPhi \} \subset C(X,F)\). It then follows from assumption 2 that \(\lim _{\epsilon \rightarrow 0}\Vert f_\epsilon -f\Vert _E=0\) uniformly for \(f \in \varPhi \). Therefore, if \(\varPhi _\epsilon \) is relatively compact for sufficiently small \(\epsilon >0\) in C(X, F), we can say that \(\varPhi \) is relatively compact in E because \(\varPhi _\epsilon \) is an \(\epsilon \)-net for \(\varPhi \), and the convergence in the supremum norm implies convergence in \(L^1\). From assumption 1, one of the conditions of Ascoli’s theorem (see [27, p.57]) is satisfied. From our assumption 2, for a given \(\epsilon >0\) and any small \(\eta >0\), we can take \(\alpha >0\) such that
uniformly for \(f \in \varPhi \) and \(|h|<\alpha \). Then, if \(|a-b|<\alpha \), we have
That is, \(\varPhi _\epsilon \) is equi-continuous, so \(\varPhi _\epsilon \) is relatively compact in C(X, F) by Ascoli’s theorem [27, p.57]; hence, \(\varPhi \) is also relatively compact in E. \(\square \)
Using Proposition 4.2, we prove the following lemma.
Lemma 4.2
Let \({{\mathscr {K}}}_\alpha \) be defined by (4.12). \({\mathscr {K}}_\alpha \) is linear, preserves the invariance of \({\mathscr {E}}_+\), and is completely continuous.
Proof
We only prove the complete continuity as the other properties are obvious. It is sufficient to show that a linear operator
is completely continuous, because \(\phi \rightarrow \phi + \alpha \lambda [\cdot ,\cdot | \phi ]\) is a bounded operator from \({\mathscr {E}}\) to itself. Let \(B \subset {\mathscr {E}}\) be a bounded subset such that \(\left| \phi \right| _{{\mathscr {E}}} \le c\) holds for any \(\phi \in B\), where \(c>0\) is a positive constant.
Let \(\epsilon > 0\). To prove condition 1 in Proposition 4.2, for each \(a \in [0, a_\dagger ]\), we show that the set \(\left\{ (T\phi )_\epsilon (a,\cdot ) : \phi \in B \right\} \) is relatively compact in \({\mathscr {X}}\), where
Let \(\eta > 0\) be an arbitrary small positive constant and let \(\delta > 0\) be sufficiently small such that
holds for any \(h \in (0,\delta )\). We have
where, without loss of generality, we have assumed \(\phi (a,\cdot )=0\) for \(a \not \in [0,a_\dagger ]\). Hence, from (4.15), we have \(\sup _{x \in \overline{\varOmega }} \left| (T\phi )_\epsilon (a,x+h) - (T\phi )_\epsilon (a,x) \right| \le \eta \), which implies that \(\left\{ (T\phi )_\epsilon (a,\cdot ) : \phi \in B \right\} \) is equi-continuous in \({\mathscr {X}}\) and, hence, relatively compact in \({\mathscr {X}}\), as its equi-boundedness is obvious.
Next, to prove condition 2 in Proposition 4.2, we show that
holds uniformly in \(\phi \in B\). Let \(\eta > 0\) be arbitrarily small, and let \(\delta > 0\) be sufficiently small such that
holds for any \(h \in (0,\delta )\). Now, we have
Taking the norm in \({\mathscr {E}}\), we have
where we have used the estimate \(|e^{-x} - e^{-y}| \le |x-y|\) for \(x,y \in {\mathbb {R}}\), \(\gamma ^+ := \mathop {\mathrm {ess.sup}} \gamma (a)\), and, without loss of generality, we have assumed \(\phi (a,\cdot )=0\) for any \(a > a_\dagger \). Hence, we have
Thus, from (4.16), we have \(\int _0^{a_\dagger } \sup _{x \in \overline{\varOmega }} \left| (T\phi ) (a+h,x) - (T\phi ) (a,x) \right| \mathrm{d}a \le \eta \), which implies that \(\lim _{h \rightarrow 0} \int _0^{a_\dagger } \left| (T\phi ) (a+h) - (T\phi ) (a) \right| _{\mathscr {X}} \mathrm{d}a = 0\) holds uniformly for \(\phi \in B\). Consequently, conditions 1 and 2 in Proposition 4.2 hold and the proof is complete. \(\square \)
Under these preparations, we prove the following proposition.
Proposition 4.3
Let \({\mathscr {C}}\) and \({\mathscr {K}}_\alpha \) be defined by (4.4) and (4.12), respectively. If \(r ({\mathscr {K}}_\alpha ) > 1\), then system (4.3) has at least one endemic equilibrium \(i^* \in {\mathscr {C}} {\setminus } \{ \mathbf {0} \}\).
Proof
From Lemma 4.2, we can apply the Krein–Rutman theorem to find that there exists a positive eigenfunction \(\varphi ^* \in {\mathscr {E}}_+ {\setminus } \{ \mathbf {0} \}\) corresponding to \(r ({\mathscr {K}}_\alpha ) > 1\). Such \(\varphi ^*\) satisfies
and hence, projecting \(\left( I -\alpha {\mathscr {A}} \right) \) on both sides of this equality yields
Then, using (4.11) and (4.13), we have
Duhamel’s principle yields
(note that \(\varphi ^*(0,x)=0\)). Hence, we obtain
In the following, for simplicity, we represent (4.17) as
Thus, \(\varphi ^* \in L^{\infty }_+ \left( [0,a_\dagger ], {\mathscr {X}} \right) \) and hence, without loss of generality, we can assume that \(\varphi ^* \in {\mathscr {C}}\). Then, for any \(\xi \in (0,1)\), we have
Thus, for sufficiently small \(\xi \in (0,1)\), we have \(\varPsi (\xi \varphi ^*) (a,x) \ge \xi \varphi ^* (a,x) \). Hence, there exists a monotone nondecreasing sequence \(\{ \varPsi ^n (\xi \varphi ^* (a,x)) \}_{n=0}^{\infty }\). As this sequence is bounded (note that \(\varPsi ({\mathscr {C}}) \subset {\mathscr {C}}\)), there exists a \(\varphi ^\infty \) such that \(\varphi ^\infty = \varPsi (\varphi ^\infty )\). This is none other than the desired endemic equilibrium \(i^* \in {\mathscr {C}} {\setminus } \{ \mathbf {0} \}\). This completes the proof. \(\square \)
Next, we prove the uniqueness of the endemic equilibrium \(i^* \in {\mathscr {C}} {\setminus } \{ \mathbf {0} \}\). From (4.3), we see that it satisfies
Then, from (4.11) and (4.13), the following inequality holds:
Similar to the calculation for (4.17), we obtain the following inequality:
Before the proof of the uniqueness, we prove the following lemma.
Lemma 4.3
Let \({\mathscr {C}}\) be defined by (4.4) and \(i^* \in {\mathscr {C}} {\setminus } \left\{ \mathbf {0} \right\} \) be an endemic equilibrium of system (4.3). Let \(\xi \in \left( 0,1 \right) \) and \(v \in {\mathscr {C}} {\setminus } \left\{ \mathbf {0} \right\} \). Then, there exists some \(c(v) >0\) such that \(\varPsi \left( \xi i^* + v \right) (a,x) \ge \xi i^* + c(v) a\).
Proof
It follows that
Hence, from the monotonicity of \(\left( I -\alpha {\mathscr {A}} \right) ^{-1}\), it follows that
Then, the proof is complete with \(c(v):=(1-\xi ) \mathrm {e}^{-\frac{1}{\alpha } a_\dagger } \lambda ^- (v)\). \(\square \)
Using Lemma 4.3, we prove the following proposition on the uniqueness of the endemic equilibrium.
Proposition 4.4
Let \({\mathscr {C}}\) be defined by (4.4). System (4.3) has at most one endemic equilibrium \(i^* \in {\mathscr {C}} {\setminus } \left\{ \mathbf {0} \right\} \).
Proof
Suppose that there exist two endemic equilibria \(i^*,j^* \in {\mathscr {C}} {\setminus } \left\{ \mathbf {0} \right\} \). From inequality (4.18), it follows that
This implies that there exists some \(\xi \in (0,1)\) such that \(i^* \ge \xi j^*\). Let \(\eta := \sup \left\{ \xi \in {\mathbb {R}}_+: \right. \) \(\left. i^* \ge \xi j^* \right\} \) and suppose that \(\eta \in (0,1)\). From the monotonicity of \(\varPsi =(I-\alpha {\mathscr {A}})^{-1} \) \((I+\alpha {\mathscr {F}})\) and inequalities (4.13) and (4.18), we have
Let \(v(a,x):=\eta (1-\eta ) \mathrm {e}^{-\left( \frac{1}{\alpha } +\lambda ^+ \right) a_\dagger } \left( \lambda ^- (j^*)/\lambda ^+ \right) ^2 j^*(a,x)^2/2\). Then, it is obvious that \(v \in {\mathscr {C}} {\setminus } \left\{ \mathbf {0} \right\} \), and it therefore follows from Lemma 4.3 that there exists some \(c(v) > 0\) such that \(\varPsi (\eta j^* + v) (a,x) \ge \eta j^* (a,x) + c(v) a\). Hence, projecting \(\varPsi \) on both sides of (4.19) yields
Recalling that \(i^* = \varPsi (i^*)\), we see that this inequality implies \(i^* \ge \left( \eta + c(v)/\lambda ^+ \right) j^* \). This contradicts the definition of \(\eta \). Therefore, \(\eta > 1\) and hence, \(i^* \ge \eta j^* \ge j^* \). Exchanging the roles of \(i^*\) and \(j^*\), we can prove \(j^* \ge i^* \) in a similar way. Consequently, \(i^* =j^* \), which completes the proof. \(\square \)
4.4 Global attractivity of equilibria
As
we have from (4.5) that
As stated in Sect. 2, when \(r({\mathscr {K}}_\alpha ) < 1\), \(\omega ({\mathscr {A}} + {\mathscr {F}}'[\mathbf {0}]) < 0\). This implies that \(\mathscr {U}(t)i_0 \rightarrow \mathbf {0}\) in \({\mathscr {E}}\) as \(t \rightarrow +\infty \), that is, the disease-free equilibrium \(\mathbf {0}\) is globally attractive. Consequently, we have the following proposition.
Proposition 4.5
Let \({\mathscr {C}}\) and \({\mathscr {K}}_\alpha \) be defined by (4.4) and (4.12), respectively. If \(r({\mathscr {K}}_\alpha ) \) \(< 1\), then the disease-free equilibrium \(\mathbf {0}\) of system (4.3) is globally attractive in \({\mathscr {C}}\).
We show that, when it exists, the endemic equilibrium \(i^* \in {\mathscr {C}} {\setminus } \{ \mathbf {0} \}\) is globally attractive for some nontrivial initial datum \(i_0 \in {\mathscr {C}} {\setminus } \{ \mathbf {0} \}\). In order to use Lemma 2.2, we prove the following lemma.
Lemma 4.4
Let \({\mathscr {C}}\) be defined by (4.4) and suppose that system (4.3) has the endemic equilibrium \(i^* \in {\mathscr {C}} {\setminus } \{ \mathbf {0} \}\). Then, \({\mathscr {U}}(t)\) is eventually \(i^*\)-positive, that is, there exist positive constants \(\xi \in (0,1)\) and \(t_0 > 0\) such that
provided that \(i_0 \in {\mathscr {C}} {\setminus } \{ \mathbf {0} \}\).
Proof
Now, we have
Hence, it follows from (4.10) that
Recalling that \(\lambda ^- \left( i(\sigma ) \right) \) is independent of age and space, we have from (4.7) that
where \(\gamma ^+ := \mathop {\mathrm {ess.sup}}_{a \in (0,a_\dagger )} \gamma (a) \in (0, +\infty )\). Hence, from (4.20), we have
where \(\left( t-a \right) \vee 0 = \max \left( t-a, 0\right) \). Let \(t_0 \ge a_\dagger \). Then, it follows that \(t_0 - a > 0\) for all \(a \in (0,a_\dagger )\) and hence, we have from (4.21) that
As \(i_0 \in {\mathscr {C}} {\setminus } \{ \mathbf {0} \}\), it follows from (4.13) and the continuity that \( \underline{\lambda } := \inf _{\sigma \in \left( 0, t_0 \right) } \) \(\lambda ^- \left( i(\sigma ) \right) > 0 \). Hence, we have
Therefore, setting \(\xi := \mathrm {e}^{-\frac{1}{\alpha } t_0} \underline{\lambda }/\lambda ^+ \in (0,1)\) completes the proof. \(\square \)
From Lemma 4.4, we can apply Lemma 2.2 to prove that the endemic equilibrium \(i^* \in {\mathscr {C}} {\setminus } \left\{ \mathbf {0} \right\} \) is globally attractive. Recalling Propositions 4.3 and 4.4, we obtain the following proposition.
Proposition 4.6
Let \({\mathscr {C}}\) and \({\mathscr {K}}_\alpha \) be defined by (4.4) and (4.12), respectively. If \(r \left( {\mathscr {K}}_\alpha \right) \) \(> 1\), then system (4.3) has the unique endemic equilibrium \(i^* \in {\mathscr {C}} {\setminus } \left\{ \mathbf {0} \right\} \) and it is globally attractive in \({\mathscr {C}} {\setminus } \{ \mathbf {0} \}\).
As in Sects. 2 and 3, we can define the basic reproduction number \({\mathscr {R}}_0\) by
Then, from Lemma 2.3, it holds that \(\mathop {\mathrm {sign}}\left( {\mathscr {R}}_0-1 \right) = \mathop {\mathrm {sign}}\left( r({\mathscr {K}}_\alpha ) - 1 \right) \). Hence, from Propositions 4.5 and 4.6, we establish the following main theorem of this section.
Theorem 4.1
Let \({\mathscr {C}}\) and \({\mathscr {R}}_0\) be defined by (4.4) and (4.22), respectively.
-
(i)
If \({\mathscr {R}}_0 < 1\), then the disease-free equilibrium \(\mathbf {0}\) of system (4.3) is globally attractive in \({\mathscr {C}}\).
-
(ii)
If \({\mathscr {R}}_0 > 1\), then system (4.3) has the unique endemic equilibrium \(i^* \in {\mathscr {C}} {\setminus } \left\{ \mathbf {0} \right\} \) and it is globally attractive in \({\mathscr {C}} {\setminus } \{ \mathbf {0} \}\).
5 Numerical simulations
In this section, we present numerical examples to demonstrate the validity and applicability of our main results, Theorems 3.1 and 4.1.
5.1 Numerical simulation for the SIS epidemic model with age and patch structures
First, we describe a numerical simulation for system (3.4). For simplicity, we consider the case of three patches (\({\mathscr {N}}=\{ 1,2,3 \}\)) and a normalized maximum age (\(a_\dagger = 1\)). We fix the following parameters.
where \(p > 0\) is a variable parameter used to observe the stability change of each equilibrium with different values of \(R_0\). Note that all parameters satisfy the required assumptions in Sect. 3. As the purpose of this section is to show the validity and applicability of our main theorems, there is little biological justification in the choice of these parameters. We leave the parameter estimation for some diseases that are suitable for our model (3.4) for future work. For the numerical computation of \(R_0 = r(K) =r(F'[0](-A)^{-1})\), we discretize our model (3.4) into a corresponding system of ordinary differential equations and compute the maximum eigenvalue of its next generation matrix [36]. We regard this as an approximation of \(R_0\) (see [23] for a similar method).
When \(p=1.15\), we have \(R_0 \approx 0.9679 < 1\). In this case, from Theorem 3.1(i), we expect the disease-free equilibrium \(\mathbf {0}\) to be globally attractive. In fact, in Fig. 1, all infective populations \(i_j(t,a)\), \(j=1,2,3\), converge to zero over time.

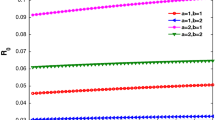
When \(p=1.25\), we have \(R_0 \approx 1.0488 > 1\). In this case, from Theorem 3.1(ii), we expect the positive endemic equilibrium \(i^*=(i_1^*,i_2^*,i_3^*)^\mathrm{T}\) to be globally attractive. In fact, in Fig. 2, all infective populations \(i_j(t,a)\), \(j=1,2,3\), converge to positive distributions over time.

5.2 Numerical simulation for the SIS epidemic model with an age structure and spatial diffusion
Next, we present numerical simulation results for system (4.3). For simplicity, we consider the case of a normalized 1-dimensional space (\(\varOmega =[0,1]\)) and a normalized maximum age (\(a_\dagger =1\)). We fix the following parameters:
where \(p>0\) is the variable parameter used in Sect. 5.1. As in Sect. 5.1, for the numerical computation of \({\mathscr {R}}_0 = r({\mathscr {K}}) = r({\mathscr {F}}'[\mathbf {0}](-\tilde{\mathscr {A}})^{-1})\), we consider a discretized system of ordinary differential equations for (4.3) and calculate the maximum eigenvalue of its next generation matrix as an approximation of \({\mathscr {R}}_0\).
When \(p=3.3\), we have \({\mathscr {R}}_0 \approx 0.9760 < 1\). In this case, from Theorem 4.1(i), we expect the disease-free equilibrium \(\mathbf {0}\) to be globally attractive. In fact, in Fig. 3, the infective population i(t, a, x) converges to zero over time.
When \(p=3.5\), we have \({\mathscr {R}}_0 \approx 1.0325 > 1\). In this case, from Theorem 4.1(ii), we expect the endemic equilibrium \(i^*\) to be globally attractive. In fact, in Fig. 4, the infective population i(t, a, x) converges to the positive distribution over time.


6 Discussion
In this paper, we have studied two kinds of SIS epidemic models with an age structure and spatial heterogeneity, (3.3) and (4.2). These were normalized to (3.4) and (4.3), respectively, and we showed that the global attractivity of each equilibrium is completely determined by the threshold values, \(r(K_\alpha )\) and \(r({\mathscr {K}}_\alpha )\), respectively. That is, if \(r(K_\alpha ) < 1\) (resp. \(r({\mathscr {K}}_\alpha ) < 1\)), then the disease-free equilibrium \(\mathbf {0}\) of system (3.4) (resp. system (4.3)) is globally attractive, whereas if \(r (K_\alpha ) > 1\) (resp. \(r({\mathscr {K}}_\alpha ) > 1\)), then the endemic equilibrium \(i^*\) of system (3.4) (resp. (4.3)) exists uniquely and is globally attractive. In particular, following the classical definition (see, e.g., [8, 16]), we have defined the basic reproduction number \(R_0\) (resp. \({\mathscr {R}}_0\)) for system (3.4) (resp. (4.3)) by the spectral radius of the next generation operator, and we have shown that \(\mathop {\mathrm {sign}} (R_0 - 1) = \mathop {\mathrm {sign}} (r(K_\alpha ) - 1)\) (resp. \(\mathop {\mathrm {sign}} ({\mathscr {R}}_0 -1) = \mathop {\mathrm {sign}} ( r({\mathscr {K}}_\alpha ) - 1 )\)). From this fact, we established our main results, Theorems 3.1 and 4.1, which state that the global attractivity of each equilibrium is completely determined by the basic reproduction number. As \(R_0\) and \({\mathscr {R}}_0\) do not depend on the sufficiently small constant \(\alpha > 0\), they can be calculated numerically. Thus, we presented the results of numerical simulations to verify the validity of our main theorems in Sect. 5. This is important from the viewpoint of applications.
In this study, we have assumed two simplifications for our models: there is no disease-induced death and the movement (diffusion) rates are the same for susceptible and infective individuals. These assumptions enabled us to reformulate the original SIS epidemic models into normalized systems for i and form monotone concave dynamical systems using \(\alpha \) so as to apply the approach of Busenberg et al. [4]. As stated in [1, Sect. 3.3], these simplifications would be suitable for some mild diseases, but their removal is an important future challenge from both mathematical and biological perspectives. In that case, we could no longer apply the approach in [4] and would have to develop a new approach (e.g., the Lyapunov functional approach) to investigate the global stability of each equilibrium.
The parameters (5.1) and (5.2) used in Sect. 5 were technical and did not have sufficient biological justification. Their estimation based on epidemic and transportation data is an important future task from a biological point of view. In particular, the patch structure model (3.3) might be more worthy than the spatial diffusion model (4.2), as it has the potential to be applied for modelling the global pandemic of diseases through the modern transportation network.
References
Arino, J.: Diseases in metapopulations. In: Ma, Z., Zhou, Y., Wu, J. (eds.) Modeling and Dynamics of Infectious Disease, pp. 65–123. World Scientific, Singapore (2009)
Arino, J., van den Driessche, P.: A multi-city epidemic model. Math. Popul. Stud. 10, 175–193 (2003)
Allen, L.J.S., Bolker, B.M., Lou, Y., Nevai, A.L.: Asymptotic profiles of the steady states for an SIS epidemic reaction-diffusion model. Disc. Cont. Dyn. Syst. 21, 1–20 (2008)
Busenberg, S.N., Iannelli, M., Thieme, H.R.: Global behavior of an age-structured epidemic model. SIAM J. Math. Anal. 22, 1065–1080 (1991)
Chicone, C., Latushkin, Y.: Evolution Semigroups in Dynamical Systems and Differential Equations. Mathematical Surveys and Monographs Vol. 70, American Mathematical Society, Providence (1999)
Choulli, M., Kayser, L.: Gaussian lower bound for the Neumann Green function of a general parabolic operator. Positivity 19, 625–646 (2015)
Choulli, M., Kayser, L.: A remark on the Gaussian lower bound for the Neumann heat kernel of the Laplace–Beltrami operator. Semigroup Forum 94, 71–79 (2017)
Diekmann, O., Heesterbeek, J.A.P.: Mathematical Epidemiology of Infectious Diseases: Model Building, Analysis and Interpretation. Wiley, Chichester (2000)
Ducrot, A.: Travelling wave solutions for a scalar age-structured equation. Discrete. Cont. Dyn. Syst. Ser. B 7, 251–273 (2007)
Feng, Z., Huang, W., Castillo-Chavez, C.: Global behavior of a multi-group SIS epidemic model with age structure. J. Diff. Equat. 218, 292–324 (2005)
Iannelli, M., Kim, M.-Y., Park, E.-J.: Asymptotic behavior for an SIS epidemic model and its approximation. Nonlinear Anal. 35, 797–814 (1999)
Iannelli, M., Milner, F.A., Pugliese, A.: Analytical and numerical results for the age-structured S-I-S epidemic model with mixed inter-intracohort transmission. SIAM J. Math. Anal. 23, 662–688 (1992)
Iggidr, A., Sallet, G., Tsanou, B.: Global stability analysis of a metapopulation SIS epidemic model. Math. Popul. Studies 19, 115–129 (2012)
Inaba, H.: A semigroup approach to the strong ergodic theorem of the multistate stable population process. Math. Popul. Studies 1, 49–77 (1988)
Inaba, H.: Threshold and stability results for an age-structured epidemic model. J. Math. Biol. 28, 411–434 (1990)
Inaba, H.: On a new perspective of the basic reproduction number in heterogeneous environments. J. Math. Biol. 65, 309–348 (2012)
Inaba, H.: Age-Structured Popualtion Dynamics in Demography and Epidemiology. Springer, Singapore (2017)
Källén, A., Arcuri, P., Murray, J.D.: A simple model for the spatial spread and control of rabies. J. Theor. Biol. 116, 377–393 (1985)
Kermack, W.O., McKendrick, A.G.: Contributions to the mathematical theory of epidemics I. Proc. R. Soc. 115, 700–721 (1927)
Kim, M.-Y.: Qualitative behavior of numerical solutions to an S-I-S epidemic model. Numer. Methods. Part. Diff. Equ. 14, 317–337 (1998)
Kim, M.-Y.: Global dynamics of approximate solutions to an age-structured epidemic model with diffusion. Adv. Comput. Math. 25, 451–474 (2006)
Krein, M.G., Rutman, M.A.: Linear operators leaving invariant a cone in a Banach space. Usephi. Mat. Nauk. 3, 3–95 (1948) (in Russian): Am. Math. Soc. Transl. 10, 199–325 (1950) (in English)
Kuniya, T.: Numerical approximation of the basic reproduction number for a class of age-structured epidemic models. Appl. Math. Lett. 73, 106–112 (2017)
Kuniya, T., Muroya, Y.: Global stability of a multi-group SIS epidemic model with varying total population size. Appl. Math. Comput. 265, 785–798 (2015)
Kuniya, T., Oizumi, R.: Existence result for an age-structured SIS epidemic model with spatial diffusion. Nonlinear Anal. RWA 23, 196–208 (2015)
Lajmanovich, A., Yorke, J.A.: A deterministic model for gonorrhea in a nonhomogeneous population. Math. Biosci. 28, 221–236 (1976)
Lang, S.: Real and Functional Analysis. Springer, New York (1993)
Langlais, M., Busenberg, S.N.: Global behaviour in age structured S.I.S. models with seasonal periodicities and vertical transmission. J. Math. Anal. Appl. 213, 511–533 (1997)
Liu, H.-L., Yu, J.-Y., Zhu, G.-T.: Stability results for an age-structured SIS epidemic model with vector population. J. Appl. Math. (2015). Article ID 838312
Marcati, P., Serafini, R.: Asymptotic behaviour in age dependent population dynamics with spatial spread. Bollettino U. M. I. 16(5), 734–753 (1979)
Peng, R., Liu, S.: Global stability of the steady states of an SIS epidemic reaction-diffusion model. Nonlinear Anal. TMA 71, 239–247 (2009)
Rass, L., Radcliffe, J.: Spatial Deterministic Epidemics. Am. Math. Soc, Providence, RI (2003)
Shenghai, Z.: On age-structured SIS epidemic model for time dependent population. Acta Math. Appl. Sin. 15, 45–53 (1999)
Thieme, H.R.: Analysis of age-structured population models with additional structure. In: Arino, O., Axelrod, D.E., Kimmel, M. (eds.) Mathematical Population Dynamics, pp. 115–126. Marcel Dekker, New York (1991)
Thieme, H.R.: Spectral bound and reproduction number for infinite-dimensional population structure and time heterogeneity. SIAM J. Appl. Math. 70, 188–211 (2009)
Van den Driessche, P., Watmough, J.: Reproduction numbers and sub-threshold endemic equilibria for compartmental models of disease transmission. Math. Biosci. 180, 29–48 (2002)
Wang, W., Zhao, X.Q.: An epidemic model in a patchy environment. Math. Biosci. 190, 97–112 (2004)
Weng, P., Zhao, X.Q.: Spreading speed and traveling waves for a multi-type SIS epidemic model. J. Diff. Equ. 229, 270–296 (2006)
Acknowledgements
TK was supported by Grant-in-Aid for Young Scientists (B) of Japan Society for the Promotion of Science (No. 15K17585) and the program of the Japan Initiative for Global Research Network on Infectious Diseases (J-GRID); from Japan Agency for Medical Research and Development, AMED. HI was supported Grant-in-Aid for Scientific Research (C) (No. 16K05266) of Japan Society for the Promotion of Science. JY was supported by the National Natural Science Foundation (No. 61573016, No. 61203228) and Shanxi Scholarship Council of China (No. 2015094). We thank Stuart Jenkinson, PhD, from Edanz Group (www.edanzediting.com/ac) for editing a draft of this manuscript.
Author information
Authors and Affiliations
Corresponding author
About this article

Cite this article
Kuniya, T., Inaba, H. & Yang, J. Global behavior of SIS epidemic models with age structure and spatial heterogeneity. Japan J. Indust. Appl. Math. 35, 669–706 (2018). https://doi.org/10.1007/s13160-018-0300-5
Received:
Revised:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s13160-018-0300-5