
Abstract
We present a Lagrange–Galerkin scheme free from numerical quadrature for convection-diffusion problems. Since the scheme can be implemented exactly as it is, theoretical stability result is assured. While conventional Lagrange–Galerkin schemes may encounter the instability caused by numerical quadrature error, the present scheme is genuinely stable. For the \(P_{k}\)-element we prove error estimates of \(O(\varDelta t + h^2 + h^{k+1})\) in \(\ell ^\infty (L^2)\)-norm and of \(O(\varDelta t + h^2 + h^k)\) in \(\ell ^\infty (H^1)\)-norm. Numerical results reflect these estimates.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
The Lagrange–Galerkin method, which is also called characteristics finite element method or Galerkin-characteristics method, is a powerful numerical method for flow problems such as the convection-diffusion equations and the Navier–Stokes equations. In this method the material derivative is discretized along the characteristic curve, which originates the robustness for convection-dominated problems. Although, as a result of the discretization along the characteristic curve, a composite function term at the previous time appears, it is converted to the right-hand side in the system of the linear equations. Thus, the coefficient matrix in the left-hand side is symmetric, which allows us to use efficient linear solvers for symmetric matrices such as the conjugate gradient method and the minimal residual method [2, 15].
Stability and error analysis of LG schemes has been done in [1, 3, 4, 6, 9–14, 16]; see also the bibliography therein. Pironneau [11] analyzed convection-diffusion problems and the Navier–Stokes equations to obtain suboptimal convergence results. Optimal convergence results were obtained by Douglas-Russell [6] for convection-diffusion problems and by Süli [16] for the Navier–Stokes equations. Optimal convergence results of second order in time were obtained by Boukir et al. [4] for the Navier–Stokes equations in multi-step method and by Rui-Tabata [14] for convection-diffusion problems in single-step method. All these theoretical results are derived under the condition that the integration of the composite function term is computed exactly. Since, in real problems, it is difficult to get the exact integration value, numerical quadrature is usually employed. It is, however, reported that instability may occur caused by numerical quadrature error in [9, 17, 18]. That is, the theoretical stability results may collapse by the introduction of numerical quadrature.
Several methods have been studied to avoid the instability. The map of a particle from a time to the previous time along the trajectory, which is nothing but to solve a system of ordinary differential equations (ODEs), is simplified in [3, 9, 13]. Morton-Priestley-Suli [9] solved the ODEs only at the centroids of the elements, and Priestley [13] did only at the vertices of the elements. The map of the other points is approximated by linear interpolation of those values. It becomes possible to perform the exact integration of the composite function term with the simplified map. Bermejo-Saavedra [3] used the same simplified map as [13] to employ a numerical quadrature of high accuracy to the composite function term. Tanaka-Suzuki-Tabata [19] approximated the map by a locally linearized velocity and the backward Euler approximation for the solution of the ODEs in \(P_{1}\)-element. The approximate map makes possible the exact integration of the composite function term with the map. Pironneau-Tabata [12] used mass lumping in \(P_{1}\)-element to develop a scheme free from quadrature for convection-diffusion problems.
In this paper we prove the stability and convergence for the scheme with the same approximate map as [19] in \({P_k}\)-element for convection-diffusion problems. Since we neither solve the ODEs nor use numerical quadrature, our scheme can be precisely implemented to realize the theoretical results. It is, therefore, a genuinely stable Lagrange–Galerkin scheme. Our convergence results are of \(O(\varDelta t + h^2 + h^{k+1})\) in \(\ell ^\infty (L^2)\)-norm and of \(O(\varDelta t + h^2 + h^k)\) in \(\ell ^\infty (H^1)\)-norm. They are best possible in both norms for \(P_1\)-element and in \(\ell ^\infty (H^1)\)-norm for \(P_2\)-element
The contents of this paper are as follows. In the next section we describe the convection-diffusion problem and some preparation. In Sect. 3, after recalling the conventional Lagrange–Galerkin scheme, we present our genuinely stable Lagrange–Galerkin scheme. In Sect. 4 we show stability and convergence results, which are proved in Sect. 5. In Sect. 6 we show some numerical results, which reflect the theoretical convergence order. In Sect. 7 we give conclusions.
2 Preliminaries
We state the problem and prepare notation used throughout this paper.
Let \(\varOmega \) be a polygonal or polyhedral domain of \({\mathbb {R}}^d ~ (d=2,3)\) and \(T>0\) be a time. We use the Sobolev spaces \(L^p(\varOmega )\) with the norm \(\left\| \cdot \right\| _{0,p}\), \({W^{s,p}}(\varOmega )\) and \(W^{s,p}_0(\varOmega )\) with the norm \(\left\| \cdot \right\| _{s,p}\) and the semi-norm \(\left|{\cdot }\right|_{s,p}\) for \(1\le p \le \infty \) and a positive integer s. We will write \(H^s(\varOmega ) = W^{s,2}(\varOmega )\) and drop the subscript \(p=2\) in the corresponding norms. The \(L^2\)-norm \(\left\| \cdot \right\| _{0}\) is simply denoted by \(\left\| \cdot \right\| \). The dual space of \(H^1_0(\varOmega )\) is denoted by \(H^{-1}(\varOmega )\). For the vector-valued function \(w\in W^{1,\infty }(\varOmega )^d\) we define the semi-norm \({|w|}_{1,\infty }\) by
The parenthesis \((\cdot , \cdot )\) shows the \(L^2\)-inner product \((f,g) \equiv \int _{\varOmega } f g ~ dx\). For a Sobolev space \(X(\varOmega )\) we use abbreviations \(H^m(X)=H^m(0,T;X(\varOmega ))\) and \(C(X)=C([0,T];X(\varOmega ))\). We define a function space \(Z^m(t_1,t_2)\) by
and denote \(Z^m(0,T)\) by \(Z^m\).
We consider the convection-diffusion problem: find \(\phi : \varOmega \times (0,T) \rightarrow \mathbb R\) such that
where \(\partial \varOmega \) is the boundary of \(\varOmega \) and \(\nu >0\) is a diffusion constant which is less than or equal to a given \(\nu _0\). Functions \(u: \varOmega \times (0,T) \rightarrow \mathbb R^d\), \(f\in C(L^2)\) and \(\phi ^0\in C(\bar{\varOmega })\) are given.
Remark 1
As usual, in place of (1b), we can deal with the inhomogeneous boundary condition \(\phi =g\) by replacing the unknown function \(\phi \) by \(\widetilde{\phi }\equiv \phi - \widetilde{g}\) if the function g defined on \(\partial \varOmega \times (0,T)\) can be extended to a function \(\widetilde{g}\) in \(\varOmega \times (0,T)\) appropriately.
Let \(\varDelta t>0\) be a time increment, \(N_T \equiv \lfloor T/\varDelta t \rfloor \), \(t^n \equiv n\varDelta t\) and \(\psi ^n \equiv \psi (\cdot ,t^n)\) for a function \(\psi \) defined in \(\varOmega \times (0,T)\). For a set of functions \(\psi =\left\{ \psi ^n\right\} _{n=0}^{N_T}\), two norms \(\left\| \cdot \right\| _{\ell ^\infty (L^2)}\) and \(\left\| \cdot \right\| _{\ell ^2(n_1, n_2;L^2)}\) are defined by
and denote \(\left\| \psi \right\| _{\ell ^2(1,N_T;L^2)}\) by \(\left\| \psi \right\| _{\ell ^2(L^2)}\).
Let u be smooth. The characteristic curve X(t; x, s) is defined by the solution of the system of the ordinary differential equations,
Then, we can write the material derivative term \({\frac{\partial \phi }{\partial t}}+u\cdot \nabla \phi \) as
For \(w:\varOmega \rightarrow {\mathbb {R}}^d\) we define the mapping \(X_1(w):\varOmega \rightarrow {\mathbb {R}}^d\) by
Remark 2
The image of x by \(X_1(u(\cdot ,t))\) is nothing but the backward Euler approximation of \(X(t-\varDelta t;x,t)\).
The symbol \(\circ \) stands for the composition of functions, e.g., \((g\circ f)(x) \equiv g(f(x))\).
Let \(\mathcal T_h \equiv \{ K \} \) be a triangulation of \(\bar{\varOmega }\) and \(h \equiv \max _{K\in \mathcal {T}_h} {\text {diam}}(K)\) be the maximum element size. Throughout this paper we consider a regular family of triangulations \(\{ \mathcal {T}_h \}_{h\downarrow 0}\). Let k be a fixed positive integer and \(V_h\subset H_0^1(\varOmega )\) be the \(P_{k}\)-finite element space,
where \(P_{k} (K)\) is the set of polynomials on K whose degrees are less than or equal to k. Let \(\widehat{\phi }_h\in V_h\) be the Poisson projection of \(\phi \in H_0^1(\varOmega )\) defined by
We use c to represent a generic positive constant independent of h, \(\varDelta t\), \(\nu \), f and \(\phi \) which may take different values at different places. The notation c(A) means that c depends on a positive parameter A and that c increases monotonically when A increases. The constants \(c_0\), \(c_1\) and \(c_2\) stand for \(c_0=c(\left\| u\right\| _{C(L^{\infty })})\), \(c_1=c(\left\| u\right\| _{C(W^{1,\infty })})\) and \(c_2=c(\left\| u\right\| _{C(W^{2,\infty })})\). We also use fixed positive constants \(\alpha _*\) and \(\delta _*\) defined in Lemma 1 in the next section and in Lemma 5 in Sect. 5, respectively.
3 A genuinely stable Lagrange–Galerkin scheme
The conventional Lagrange–Galerkin scheme, which we call Scheme LG, is described as follows.
Scheme LG
Let \(\phi _h^0 = \widehat{\phi }_h^0\). Find \(\left\{ \phi _h^n\right\} _{n=1}^{N_T} \subset V_h\) such that for \( n=1,\ldots ,N_T\)
where \(X_1^{n}=X_1(u^{n})\).
For this scheme error estimates
are proved in [6], where the composite function term \(( \phi _h^{n-1} \circ X_1^{n}, \psi _h )\) is assumed to be exactly integrated.
Although the function \(\phi _h^{n-1}\) is a polynomial on each element K, the composite function \(\phi _h^{n-1} \circ X_1^{n}\) is not a polynomial on K in general since the image \(X_1^{n}(K)\) of an element K may spread over plural elements. Hence, it is hard to calculate the composite function term \(( \phi _h^{n-1} \circ X_1^{n}, \psi _h )\) exactly. In practice, the following numerical quadrature has been used. Let \(g:K \rightarrow {\mathbb {R}}\) be a continuous function. A numerical quadrature \(I_h[g;K]\) of \(\int _K g \, dx\) is defined by
where \(N_q\) is the number of quadrature points and \((w_i, a_i)\in {\mathbb {R}}\times K\) is a pair of weight and point for \(i=1,\ldots , N_q\). We call the practical scheme using numerical quadrature Scheme LG\(^\prime \).
Scheme LG \(^\prime \) Let \(\phi _h^0 = \widehat{\phi }_h^0\). Find \(\left\{ \phi _h^n\right\} _{n=1}^{N_T} \subset V_h\) such that for \( n=1,\ldots ,N_T\)
where \(X_1^{n}=X_1(u^{n})\).
It is reported that the results (6) do not hold for Scheme LG\(^\prime \) [9, 17–19].
We denote by \(\varPi _h^{(1)}\) the Lagrange interpolation operator to the \(P_{1}\)-finite element space. The following lemma is well-known [5].
Lemma 1
-
(i)
There exists a positive constant \(c_{\varPi }\) such that for \(w \in W^{2,\infty }(\varOmega )^d\)
$$\begin{aligned} {||\varPi _h^{(1)} w -w||}_{0,\infty } \le c_{\varPi }h^{2} \left|{w}\right|_{2,\infty }. \end{aligned}$$ -
(ii)
There exists a positive constant \(\alpha _*\ge 1\) such that for \(w\in W^{1,\infty }(\varOmega )^d\)
$$\begin{aligned} {|\varPi _h^{(1)} w|}_{1,\infty } \le \alpha _*\left|{w}\right|_{1,\infty }. \end{aligned}$$
We now present our genuinely stable scheme GSLG, which is free from quadrature and exactly computable. We define a locally linearized velocity \(u_h\) and a mapping \(X_{1h}^n\) by
Scheme GSLG
Let \(\phi _h^0 = \widehat{\phi }_h^0\). Find \(\left\{ \phi _h^n\right\} _{n=1}^{N_T} \subset V_h\) such that for \(n=1,\ldots ,N_T\)
We show that the integration \((\phi _h^{n-1}\circ X_{1h}^{n},\psi _h)\) can be calculated exactly.

Elements \(K_0\), \(K_1\) and a polygon \(E_1\)
At first we prepare two lemmas. The next lemma on the mapping (3) is proved in [14].
Lemma 2
([14, Proposition 1]) Suppose
Let \(F\equiv X_1(w)\) be the mapping defined in (3). Then, \(F :\varOmega \rightarrow \varOmega \) is bijective.
Lemma 3
Let \(K_0, K_1\in \mathcal T_h\) and \(F:K_0\rightarrow {\mathbb {R}}^d\) be linear and one-to-one. Let \( E_1 \equiv K_0 \cap F^{-1} (K_1) \) and \({\text {meas}}(E_1)>0\). Then, the following hold.
-
(i)
\(E_1\) is a polygon (\(d=2\)) or a polyhedron (\(d=3\)).
-
(ii)
\(\phi _h \circ F_{|E_1}\in P_{k} (E_1), \quad \forall \phi _h \in P_{k}(K_1)\).
Proof
(i) Since both \(K_0\) and \(F^{-1}(K_1)\) are triangles (\(d=2\)) or tetrahedra (\(d=3\)), the intersection is a polygon or a polyhedron. See Fig. 1.
(ii) \(F\in P_{1} (K_0)^{d}\) implies that \(F\in P_{1}(E_1)^d\) and it holds that \(F(E_1)\subset K_1\). Hence, \(\phi _h \circ F_{|E_1}\) is well defined and \(\phi _h \circ F_{|E_1} \in P_{k} (E_1)\). \(\square \)
Proposition 1
Let \(\phi _h\), \(\psi _h\in V_h\), \(w\in W^{1,\infty }_0(\varOmega )\) and \(X_{1h}\equiv X_1(\varPi _h^{(1)} w)\), where \(X_1\) is the operator defined in (3). Suppose \( \alpha _*\varDelta t \left|{w}\right|_{1,\infty } <1\). Then, \(\int _{\varOmega } (\phi _h \circ X_{1h}) \psi _h dx\) is exactly computable.
Proof
It is sufficient to show that \(\int _{K_0} (\phi _h \circ X_{1h}) \psi _h dx\) can be computable exactly for any \(K_0 \in \mathcal T_h\). The mapping \(X_{1h}:\varOmega \rightarrow \varOmega \) is bijective since we can apply Lemma 2 thanks to
Let \(\varLambda (K_0) \equiv \left\{ l; K_0\cap X_{1h}^{-1}(K_l) \not = \emptyset \right\} \) and \(E_l \equiv K_0 \cap X_{1h}^{-1}(K_l)\) for \(l\in \varLambda (K_0)\). Noting that
and that \({\text {meas}}(E_l\cap E_m)=0\) for \(l \not =m\), \(l,m \in \varLambda (K_0)\), we can divide the integration on \(K_0\) into the sum of those on \(E_l\) for \(l \in \varLambda (K_0)\),
Since Lemma 3 with \(F=X_{1h}\) implies that both \(\phi _h\circ X_{1h}\) and \(\psi _h\) are polynomials on \(E_l\), we can execute the exact integration. \(\square \)
Remark 3
In the case of \(d=2\), Priestley [13] approximated \(X(t^{n-1};x,t^n)\) by
on each \(K_0 \in \mathcal T_h\), where \(B_i=X(t^{n-1};A_i,t^n)\), \(\left\{ A_i\right\} _{i=1}^3\) are vertices of \(K_0\) and \(\left\{ \lambda _i\right\} _{i=1}^3\) are the barycentric coordinates of \(K_0\) with respect to \(\left\{ A_i\right\} _{i=1}^3\). Since \(\widetilde{X}_{1h}(x)\) is linear in \(K_0\), the decomposition
makes the exact integration possible. However, \(B_i = X(t^{n-1};A_i,t^n)\) are the solutions of a system of ordinary differential equations and they cannot be solved exactly in general. In practice, some numerical method, e.g., Runge–Kutta method, is required, which introduces another error.
4 Main results
We show the main results, the stability and convergence of Scheme GSLG.
Hypothesis 1
(i) \(u\in C((W_0^{1,\infty })^d)\), (ii) \(u\in C((W_0^{1,\infty } \cap W^{2,\infty })^d)\).
Hypothesis 2
\(\phi \in H^1(H^{k+1}) \cap Z^2\).
Hypothesis 3
The time increment \(\varDelta t\) satisfies \(0<\varDelta t\le \varDelta t_0\), where
and \(\alpha _*\) and \(\delta _*\) are the constants stated in Lemma 1 (Sect. 3) and Lemma 5 (Sect. 5), respectively.
Hypothesis 4
There exists a positive constant \(c_P\) such that, for \(\psi \in H^{k+1}(\varOmega ) \cap H_0^1(\varOmega )\),
where \(\widehat{\psi }_h\) is the Poisson projection defined in (4).
Remark 4
-
(i)
It is well-known that the \(H^1\)-estimate
$$\begin{aligned} {||\widehat{\psi }_h-\psi ||}_{1} \le c_Ph^{k} \left\| \psi \right\| _{k+1} \end{aligned}$$(14)holds without any specific condition. On the other hand, Hypothesis 4 holds, for example, if \(\varOmega \) is convex, by Aubin-Nitsche Lemma [5].
-
(ii)
Hypothesis 2 implies \(\phi \in C(H^{k+1})\) and \(\phi ^0\in H^{k+1}(\varOmega )\).
Theorem 1
Suppose Hypotheses 1-(i) and 3. Then, there exists a positive constant \(c_*\) independent of \(h, \varDelta t, \nu , \phi \) and f such that
Theorem 2
Suppose Hypotheses 1-(ii), 2 and 3.
(i) There exists a positive constant \(c_*\) independent of \(h, \varDelta t, \nu \) and \(\phi \) such that
(ii) There exists a positive constant \(c_{**}\) independent of \(h,\varDelta t,\phi \) (but dependent on \(1/\nu \)) such that
(iii) Moreover, suppose Hypothesis 4. Then, there exists a positive constant \(c_{***}\) independent of \(h, \varDelta t, \nu \) and \(\phi \) such that
Remark 5
From Theorem 2, we have
In the case of \(P_{k}\)-element, \(k=1,2\), the estimate (15) shows the optimal \(L^2\)-convergence rate \(O(\varDelta t + h^k)\) independent of \(\nu \). The dependency on \(\nu \) in (16) and (17) is also inevitable in Scheme LG.
5 Proofs of main theorems
We recall some results used in proving main theorems. For their proofs we only show outlines or refer to the bibliography.
Lemma 4
([14, Lemma 1]) Suppose \(w\in W_0^{1,\infty }(\varOmega )^d \) and
Let \(F\equiv X_1(w)\) be the mapping defined in (3). Then, there exists a positive constant \(c(\left|{w}\right|_{1,\infty })\) such that for \(\psi \in L^2(\varOmega )\)
The proof is given in [14].
Lemma 5
There exists a constant \(\delta _*\in (0,1)\) such that, for \(w\in W^{1,\infty }_0(\varOmega )^d\) and \(\varDelta t\) satisfying \(\varDelta t\left|{w}\right|_{1,\infty } \le \delta _*\),
where \(|\partial X_1(w)/\partial x|\) is the Jacobian of the mapping \(X_1(w)\) defined in (3).
Lemma 5 is easily proved by the fact,
Lemma 6
Let \(w_i\in W_0^{1,\infty }(\varOmega )^d\) and \(F_i\equiv X_1(w_i)\) be the mapping defined in (3) for \(i=1,2\). Under the condition \(\varDelta t \left|{w_i}\right|_{1,\infty } \le \delta _*\), \(i=1,2\), we have for \(\psi \in H^1(\varOmega )\)
Lemma 6 is a direct consequence of [1, Lemma 4.5] and Lemma 5.
Lemma 7
Let \(w\in W_0^{1,\infty }(\varOmega )^d\) and \(F\equiv X_1(w)\) be the mapping defined in (3). Under the condition \(\varDelta t \left|{w}\right|_{1,\infty } \le \delta _*\), there exists a positive constant \( c(\left\| w\right\| _{1,\infty })\) such that for \(\psi \in L^2(\varOmega )\)
Lemma 7 is obtained from [6, Lemma 1] and Lemma 5.
Lemma 8
(discrete Gronwall inequality) Let \(a_0\) and \(a_1\) be non-negative numbers, \(\varDelta t \in (0,\frac{1}{2a_0}]\) be a real number, and \(\left\{ x^n\right\} _{n\ge 0}, \left\{ y^n\right\} _{n\ge 1}\) and \(\left\{ b^n\right\} _{n\ge 1}\) be non-negative sequences. Suppose
Then, it holds that
Lemma 8 is shown by using the inequalities
Outline of the proof of Theorem 1. We substitute \(\phi _h^n\) into \(\psi _h\) in (9). We can apply Lemma 4 with \(w=u_h^n\) and \(\psi =\phi _h^{n-1}\) by virtue of \(\varDelta t \left|{u_h}\right|_{C(W^{1,\infty })} <1\). The rest of the proof is similar to [14, Theorem 1]. We, therefore, omit it.
Proof of Theorem 2
We first show the estimate (15). Let
where \(\widehat{\phi }_h\) is the Poisson projection defined in (4). From (1a), (1b) and (9) we have
for \(\psi _h \in V_h\), where
Substituting \(e_h^n\) into \(\psi _h\), applying Lemma 4 with \(F=X_{1h}^{n}\) and \(\psi =e_h^{n-1}\), and evaluating the first term of the left-hand side as
we have
where \(\left\{ \varepsilon _i\right\} _{i=1}^4\) are positive constants satisfying \(\varDelta t_0\le \frac{1}{4\varepsilon _0}\), \(\varepsilon _0 \equiv \sum _{i=1}^4 \varepsilon _i\).
We evaluate \(R_i\), \(i=1,\ldots ,4\). Setting
we have
which implies
Hence, we have
where we have used the transformation of independent variables from x to y and \(s_1\) to t, and the estimate \(| \partial x / \partial y | \le 2\) by virtue of Lemma 5.
From \(\varDelta t \left|{u}\right|_{C(W^{1,\infty })}, \varDelta t \left|{u_h}\right|_{C(W^{1,\infty })} \le \delta _*\), and Lemmas 1 and 6 it holds that
\(R_3^n\) is evaluated as
where we have used (14).
From \(\varDelta t \left|{u_h}\right|_{C(W^{1,\infty })} \le \delta _*\) and Lemma 6 it holds that
From Lemma 8 we obtain for \(n=1,\ldots ,N_T\)
which implies (15) by virtue of \(e_h^0 = 0\) and the triangle inequalities,
We show the estimate (16). The Eq. (20) can be rewritten as
where
From Lemma 6 it holds that
Substituting \({\overline{D}_{\varDelta t}}e_h^n \equiv \frac{1}{\varDelta t}(e_h^n-e_h^{n-1})\) into \(\psi _h\), and using (23)–(26) for \(R_1,\ldots ,R_4\), we have
From Lemma 8 we have for \(n=1,\ldots ,N_T\)
which implies (16) by virtue of \(e_h^0=0\), the triangle inequality,
and the Poincaré inequality,
Now we show the estimate (17). We return to the error Eq. (20). Using (13) in place of (14) in the estimate of \(R_3^n\), we can evaluate (25) as
From Lemma 7 we have
Hence, it holds that
where we have used the Poincaré inequality (28). Using this inequality instead of \(\frac{1}{4\varepsilon _4}\left\| R_4^n\right\| ^2+ \varepsilon _4\left\| e_h^n\right\| ^2\) in (22) and replacing the last term of (27) by \(c_Ph^{k+1} \left\| \phi \right\| _{\ell ^\infty (H^{k+1})}\), we obtain (17). \(\square \)

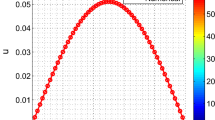
The function \(\phi _e (\cdot ,0)\) (left) and the triangulation of \(\bar{\varOmega }\) for \(N=64\) (right) in Example 1

Graphs of \(E_{L^2}\) and \(E_{H_0^1}\) versus h in Example 1 by \(P_{k}\)-element. \(k=1\) (left) and \(k=2\) (right)

Solutions \(\phi _h^n ~ (n\varDelta t \fallingdotseq 2\pi )\) in Example 1 by Scheme LG\(^\prime \) (top left) and Scheme GSLG (top right) for \(P_{1}\)-element, and by Scheme LG\(^\prime \) (bottom left) and Scheme GSLG (bottom right) for \(P_{2}\)-element
6 Numerical results
We show numerical results in \(d=2\). We compare the conventional scheme (Scheme LG\(^\prime \)) with the present one (Scheme GSLG). We use FreeFem++ [8] for the triangulation of the domain. Both \(P_{1}\)- and \(P_{2}\)-elements are used. For Scheme LG\(^\prime \) we use the seven points quadrature formula of degree five [7]. A relative error \(E_X\) is defined by
where \(\varPi _h^{(k)}\) is the Lagrange interpolation operator to the \(P_{k}\)-finite element space and \(X=L^2(\varOmega )\) or \(H_0^1(\varOmega )\).
Example 1
(The rotating Gaussian hill [14]) In (1), \(\varOmega \) is an unit disk, and we set \(T=2\pi , \nu =10^{-5}\),
where
In this problem the identity \(\varPi _h^{(1)}u=u\) holds. This problem does not satisfy our setting because \(\varOmega \) is not a polygon and \(u\not =0\) on \(\partial \varOmega \). The function \(\phi _e\) in Fig. 2 (left) satisfies (1a) and (1c) but does not satisfy the boundary condition (1b). However, we may apply the schemes and treat \(\phi _e\) as the solution since the value of \(\phi _e\) on \(\partial \varOmega \) is almost equal to zero, less than \(10^{-15}\), and we may neglect the effect of the boundary value and the term \(\int _K(\phi _h^{n-1}\circ X_1^{n}) \psi _h dx\) and \(\int _K(\phi _h^{n-1}\circ X_{1h}^{n})\psi _h dx\) on the element K touching the boundary.
Let N be the division number of the circle. We set \(h\equiv 2\pi /N, N=32, 64, 128\) and 256. Figure 2 (right) shows the triangulation of \(\bar{\varOmega }\) for \(N=64\). The time increment \(\varDelta t\) is set to be \(c_1 h \) and \(c_2 h^2 \) for \(P_{1}\)-element (\(c_1 = \frac{4}{5\pi }\fallingdotseq 0.255,~c_2 = \frac{64}{5\pi ^2}\fallingdotseq 1.30\)), \(c_3 h^2 \) and \(c_4 h^3 \) for \(P_{2}\)-element (\(c_3 = \frac{128}{5\pi ^2}\fallingdotseq 2.59,~c_4 = \frac{2048}{5\pi ^3}\fallingdotseq 13.21\)) so that we can observe the convergence behavior of \(O(h^k)\) for \(E_{H_0^1}\), and \(O(h^k)\) and \(O(h^{k+1})\) for \(E_{L^2}\) when \(P_{k}\)-element is employed.

The triangulation of \(\bar{\varOmega }\) for \(N=16\) in Example 2

Graphs of \(E_{L^2}\) and \(E_{H_0^1}\) versus h in Example 2 with \(\nu =10^{-2}\) by \(P_{k}\)-element. \(k=1\) (left) and \(k=2\) (right)
In the following figures we use the symbols shown in Table 1. Figure 3 shows the log-log graphs of \(E_{L^2}\) and \(E_{H_0^1}\) versus h. The left graph shows the results of \(P_{1}\)-element and Table 2 shows the values of them. The convergence order of \(E_{L^2}\) with \(\varDelta t=O(h)\) is less than 1 in Scheme LG\(^\prime \) (\(\Box \)) and more than 1 in Scheme GSLG (\(\bigcirc \)). The orders of \(E_{L^2}\) with \(\varDelta t=O(h^2)\) are almost 2 for small h in both schemes (

, \(\circledcirc \)). The convergence of \(E_{H_0^1}\) is not observed in Scheme LG\(^\prime \) (\(\blacksquare \)) while the order is almost 1 in Scheme GSLG (

). The right graph of Fig. 3 shows the results of \(P_{2}\)-element and Table 3 shows the values of them. The errors \(E_{L^2}\) with \(\varDelta t=O(h^2)\) are too large at \(N=128\) and 256 to be plotted in the graph in Scheme LG\(^\prime \) (\(\Box \)) while the convergence order is almost 2 in Scheme GSLG (\(\bigcirc \)). The error \(E_{L^2}\) with \(\varDelta t=O(h^3)\) is large at \(N=128\), but it becomes small again at \(N=256\) in Scheme LG\(^\prime \) (

). We will discuss the reason why such a behavior occurs in the forthcoming paper [20]. The order is greater than 2.5 in Scheme GSLG (\(\circledcirc \)). The errors \(E_{H_0^1}\) are too large at \(N=128\) and 256 to be plotted in the graph in Scheme LG\(^\prime \) (\(\blacksquare \)) while we can observe the convergence of \(E_{H_0^1}\) but the order is less than 2 in Scheme GSLG (

). The errors of Scheme GSLG are smaller than those of Scheme LG\(^\prime \) in both cases of \(P_{1}\)- and \(P_{2}\)-element.
Figure 4 shows the solutions \(\phi _h^n\) for \(h=2\pi /64 \fallingdotseq 0.0982, \varDelta t = 0.0065\), \(n\varDelta t \fallingdotseq 2\pi \). In the case of \(P_{1}\)-element, the solution of Scheme LG\(^\prime \) is oscillatory while that of Scheme GSLG is much better though a small ruggedness is observed. In the case of \(P_{2}\)-element, the solution of Scheme LG\(^\prime \) is quite oscillatory while that of Scheme GSLG is stable.

Graphs of \(E_{L^2}\) and \(E_{H_0^1}\) versus h in Example 2 with \(\nu =10^{-5}\) by \(P_{k}\)-element. \(k=1\) (left) and \(k=2\) (right)
Example 2
In (1), \(\varOmega \) is the square \((0,1)\times (0,1)\), and we set \(T=1, \nu =10^{-2}\) and \(10^{-5}\),
where
In this problem, \(\varPi _h^{(1)} u\not = u\). Let N be the division number of each side of \(\bar{\varOmega }\). We set \(h\equiv 1/N, N=8, 16, 32\) and 64. Figure 5 shows the triangulation of \(\bar{\varOmega }\) for \(N=16\). The time increment \(\varDelta t\) is set to be \(c_1 h \) and \(c_2 h^2\) for \(P_{1}\)-element \((c_1=0.125,c_2=1)\), \(c_3 h^2\) and \(c_4 h^3\) for \(P_{2}\)-element \((c_3=1,c_4=5.12)\) so that we can observe the convergence behavior of \(O(h^k)\) for \(E_{H_0^1}\), and \(O(h^k)\) and \(O(h^{k+1})\) for \(E_{L^2}\) when \(P_{k}\)-element is employed.
Figure 6 shows the log-log graphs of \(E_{L^2}\) and \(E_{H_0^1}\) versus h with \(\nu =10^{-2}\). The left graph shows the results of \(P_{1}\)-element and Table 4 shows the values of them. The convergence orders of \(E_{L^2}\) with \(\varDelta t=O(h)\) are almost 1 in both schemes (\(\Box \), \(\bigcirc \)). The orders of \(E_{L^2}\) with \(\varDelta t=O(h^2)\) are almost 2 in both schemes (

, \(\circledcirc \)). The orders of \(E_{H_0^1}\) are almost 1 in both schemes (\(\blacksquare \),

). The right graph of Fig. 6 shows the results of \(P_{2}\)-element and Table 5 shows the values of them. The convergence orders of \(E_{L^2}\) with \(\varDelta t=O(h^2)\) are almost 2 in both schemes (\(\Box \), \(\bigcirc \)). The order of \(E_{L^2}\) with \(\varDelta t=O(h^3)\) is almost 3 in Scheme LG\(^\prime \) (

) and almost 2 in Scheme GSLG (\(\circledcirc \)). The orders of \(E_{H_0^1}\) are almost 2 in both schemes (\(\blacksquare \),

). These results are consistent with the theoretical ones of Scheme GSLG, \(E_{L^2}=O(\varDelta t + h^2 + h^{k+1})\) and \(E_{H_0^1}=O(\varDelta t + h^2 + h^{k})\).
Figure 7 shows the log-log graphs of \(E_{L^2}\) and \(E_{H_0^1}\) versus h with \(\nu =10^{-5}\). The left graph shows the results of \(P_{1}\)-element and Table 6 shows the values of them. The convergence orders of \(E_{L^2}\) with \(\varDelta t=O(h)\) are almost 1 in both schemes (\(\Box \), \(\bigcirc \)). The orders of \(E_{L^2}\) with \(\varDelta t=O(h^2)\) are almost 2 for small h in both schemes (

, \(\circledcirc \)). The orders of \(E_{H_0^1}\) are almost 1 in both schemes (\(\blacksquare \),

). The right graph of Fig. 7 shows the results of \(P_{2}\)-element and Table 7 shows the values of them. The errors \(E_{L^2}\) with \(\varDelta t=O(h^2)\) are too large at \(N=32\) and 64 to be plotted in the graph in Scheme LG\(^\prime \) (\(\Box \)) while the convergence order is almost 2 in Scheme GSLG (\(\bigcirc \)). The order \(E_{L^2}\) with \(\varDelta t=O(h^3)\) is almost 3 for small h in Scheme LG\(^\prime \) (

) and almost 2 in Scheme GSLG (\(\circledcirc \)). The errors \(E_{H_0^1}\) are too large at \(N=32\) and 64 to be plotted in the graph in Scheme LG\(^\prime \) (\(\blacksquare \)) while we can observe the convergence but the order is less than 2 in Scheme GSLG (

). In order to obtain the theoretical convergence order \(O(h^2)\), it seems that finer mesh will be necessary.
7 Conclusions
We have presented a genuinely stable Lagrange–Galerkin scheme for convection-diffusion problems. In the scheme locally linearized velocities are used and the integration is executed exactly without numerical quadrature. For the \(P_{k}\)-element we have shown error estimates of \(O(\varDelta t + h^2 + h^{k+1})\) in \(\ell ^\infty (L^2)\)-norm and of \(O(\varDelta t + h^2 + h^k)\) in \(\ell ^\infty (H^1)\)-norm. We have also obtained error estimate, \(c(\varDelta t + h^2 + h^k)\) in \(\ell ^\infty (L^2)\)-norm, where the coefficient c is dependent on the exact solution \(\phi \) but independent of the diffusion constant \(\nu \). Numerical results have reflected these estimates. The extension to the Navier–Stokes equations will be discussed in a forthcoming paper.
References
Achdou, Y., Guermond, J.: Convergence analysis of a finite element projection/Lagrange-Galerkin method for the incompressible Navier-Stokes equations. SIAM J. Numer. Anal. 37(3), 799–826 (2000)
Barrett, R., Berry, M., Chan, T.F., Demmel, J., Donato, J., Dongarra, J., Eijkhout, V., Pozo, R., Romine, C., Van der Vorst, H.: Templates for the Solution of Linear Systems: Building Blocks for Iterative Methods, 2nd edn. SIAM, Philadelphia (1994)
Bermejo, R., Saavedra, L.: Modified Lagrange-Galerkin methods of first and second order in time for convection-diffusion problems. Numer. Math. 120(4), 601–638 (2012)
Boukir, K., Maday, Y., Métivet, B., Razafindrakoto, E.: A high-order characteristics/finite element method for the incompressible Navier–Stokes equations. Int. J. Numer. Methods Fluids 25(12), 1421–1454 (1997)
Ciarlet, P.G.: The Finite Element Method for Elliptic Problems. Classics in Applied Mathematics. SIAM (2002)
Douglas Jr, J., Russell, T.: Numerical methods for convection-dominated diffusion problems based on combining the method of characteristics with finite element or finite difference procedures. SIAM J. Numer. Anal. 19(5), 871–885 (1982)
Hammer, P.C., Marlowe, O.J., Stroud, A.H.: Numerical integration over simplexes and cones. Math. Comput. 10, 130–137 (1956)
Hecht, F.: New development in FreeFem++. J. Numer. Math. 20(3–4), 251–265 (2012)
Morton, K.W., Priestley, A., Suli, E.: Stability of the Lagrange-Galerkin method with non-exact integration. Modél. Mathémat. Anal. Numér. 22(4), 625–653 (1988)
Notsu, H., Tabata, M.: Error estimates of a pressure-stabilized characteristics finite element scheme for the Oseen equations. J. Sci. Comput. (2015). doi:10.1007/s10915-015-9992-8
Pironneau, O.: On the transport-diffusion algorithm and its applications to the Navier–Stokes equations. Numer. Math. 38, 309–332 (1982)
Pironneau, O., Tabata, M.: Stability and convergence of a Galerkin-characteristics finite element scheme of lumped mass type. Int. J. Numer. Methods Fluids 64(10–12), 1240–1253 (2010)
Priestley, A.: Exact projections and the Lagrange-Galerkin method: a realistic alternative to quadrature. J. Comput. Phys. 112(2), 316–333 (1994)
Rui, H., Tabata, M.: A second order characteristic finite element scheme for convection-diffusion problems. Numer. Math. 92, 161–177 (2002)
Saad, Y.: Iterative Methods for Sparse Linear Systems. SIAM, Philadelphia (2003)
Süli, E.: Convergence and nonlinear stability of the Lagrange-Galerkin method for the Navier-Stokes equations. Numer. Math. 53(4), 459–483 (1988)
Tabata, M.: Discrepancy between theory and real computation on the stability of some finite element schemes. J. Comput. Appl. Math. 199(2), 424–431 (2007)
Tabata, M., Fujima, S.: Robustness of a characteristic finite element scheme of second order in time increment. In: Computational Fluid Dynamics 2004, pp. 177–182. Springer (2006)
Tanaka, K., Suzuki, A., Tabata, M.: A characteristic finite element method using the exact integration. Annu. Rep. Res. Inst. Inf. Technol. Kyushu Univ. 2, 11–18 (2002). (in Japanese)
Uchiumi, S.: Conditional stability of the Lagrange-Galerkin scheme with numerical quadrature. JSIAM Lett. (to appear)
Acknowledgments
The first author was supported by JSPS (Japan Society for the Promotion of Science) under Grants-in-Aid for Scientific Research (C)No. 25400212 and (S)No. 24224004 and under the Japanese-German Graduate Externship (Mathematical Fluid Dynamics) and by Waseda University under Project research, Spectral analysis and its application to the stability theory of the Navier–Stokes equations of Research Institute for Science and Engineering. The second author was supported by JSPS under Grant-in-Aid for JSPS Fellows No. 26\(\cdot \)964.
Author information
Authors and Affiliations
Corresponding author
About this article

Cite this article
Tabata, M., Uchiumi, S. A genuinely stable Lagrange–Galerkin scheme for convection-diffusion problems. Japan J. Indust. Appl. Math. 33, 121–143 (2016). https://doi.org/10.1007/s13160-015-0196-2
Received:
Revised:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s13160-015-0196-2