
Abstract
This paper is concerned with the anti-periodic solution problem for a class of neutral type cellular neural networks with D operator. By using the Banach fixed point theorem and applying inequality techniques, some new sufficient conditions are established to ensure the existence and exponential stability of the unique anti-periodic solution for the proposed neural networks. Finally, an example with its numerical simulation is provided to show the correctness of our study.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Recently, neural networks have been a subject of intensive research activities in the existing literature and have found widespread applications in various fields, such as target tracking, machine learning system identification, associative memories, pattern recognition, solving optimization problems, image processing, signal processing, and so on [1–4]. In particular, it has been recognized that the time delays often occur in various neural networks, and may cause undesirable dynamic behaviors such as oscillation and instability. Therefore, the stability analysis for delayed cellular neural networks (CNNs) has become a topic of great theoretic and practical importance in the literature [5–7]. In addition, neutral-type phenomenon always appears in the study of automatic control, population dynamics and vibrating masses attached to an elastic bar, and so forth. Hence, the stability and other dynamic behaviors for different classes of CNNs with neutral type delays were studied in [8–15]. It should be pointed out that all neutral type CNNs models considered in the aforementioned references can be described as non-operator-based neutral functional differential equations (NFDEs) and D-operator-based NFDEs, respectively. Usually, based on the complex neural reactions, D-operator-based CNNs can be defined as the following NFDEs (see [16–18]):
where \(i\in J=\{1, 2, \ldots , n\},\) \((x_{1}(t), x_{2}(t), \ldots , x_{n}(t))^{T}\) corresponds to the state vector, \(c_{i}(t)\) represents the rate of decay, \(F_{j},\) \(G_{j}\) and \(\tilde{G}_{j}\) are the activation functions of signal transmission. The detailed biological explanation of the coefficients \(a_{ij}(t)\), \(b_{ij}(t)\), \(d_{ij}(t)\) and delays \(\tau _{ij}(t),\) \(r_{i}(t)\), \(\sigma _{ij }(u)\) can be found in [18, 19].
As discussed in [20], when investigating the exponential stability criteria, the exponential convergence rate can be utilized in ascertaining the speed of neural calculations. For this reason, studying the exponential stability has practical significance, and it is useful to estimate and ensure the exponential convergence rate of delayed CNNs [21–25]. On the other hand, anti-periodic phenomenon often occurs in the signal transmission among the neurons, and therefore, the existence and exponential stability of anti-periodic solutions of delayed CNNs have been an attractive subject of research [26–31]. However, it should be mentioned that all above results on anti-periodic problem were obtained only for non-operator-based CNNs. We only found that the reference [18] dealt with the global exponential convergence on the zero vector of CNNs with neutral type delays and D operator. Meanwhile, it is difficult to construct a suitable Lyapunov functional to study the stability of anti-periodic solutions of neutral type CNNs with D operator. Consequently, to the best of our knowledge, there exist few works on the existence and global exponential stability of anti-periodic solutions of neutral type CNNs with D operator.
Inspired by the above discussions, the aim of this paper is to provide a criterion to guarantee that all state vectors of (1.1) converge to a anti-periodic solution with a positive exponential convergence rate.
The initial condition associated with neutral type CNNs (1.1) is of the form
where \(\phi _{i}(\cdot )\) is a real-valued bounded and continuous function defined on \((-\infty , 0]\).
2 Preliminary results
Throughout this paper, we denote by \(\mathbb {R}^{n}\)(\(\mathbb {R}=\mathbb {R}^{1}\)) the set of all \(n-\)dimensional real vectors (real numbers). For any \(x=(x_{1}, \ x_{2}, \ldots , x_{ n})^{\mathbf {T}} \in \mathbb {R}^{ n}\), we let \(\{x_{i}\}=(x_{1}, \ x_{2}, \ldots , x_{ n})^{\mathbf {T}},\) |x| denote the absolute-value vector given by \(|x|=\{|x_{i}|\}\), and define \(\Vert x \Vert =\max \nolimits _{ i\in J} |x_{i } |\). Given a bounded and continuous function h defined on \(\mathbb {R}\), we denote
Also, \(BC(\mathbb {R},\mathbb {R}^{n})\) denotes the set of bounded and continued functions from \(\mathbb {R}\) to \(\mathbb {R}^{n}\). Note that \((BC(\mathbb {R},\mathbb {R}^{n}), \Vert \cdot \Vert _{\infty } )\) is a Banach space where \(\Vert \cdot \Vert _{\infty }\) denotes the sup norm \(\Vert f\Vert _{\infty } := \sup \nolimits _{ t\in \mathbb {R}} \Vert f (t)\Vert\). Furthermore, let
designate the set of \(T-\)anti-periodic functions from \(\mathbb {R}\) to \(\mathbb {R}^{ n}\).
Moreover, it will be assumed that \(\tau _{ij}, r_{i} :{\mathbb {R}}\rightarrow [0, \ +\infty ) \in BC(\mathbb {R},\mathbb {R} ),\) \(c_{i}, q_{i}, I_{i}, \ a_{ij}, \ b_{ij }, d_{ij } \in BC(\mathbb {R},\mathbb {R} )\),
and
For \(i, j \in J\), the following assumptions will be adopted:
-
\((H_0)\) there exist a bounded and continuous function \(\tilde{c}_{i} :\mathbb {R}\rightarrow (0, \ +\infty )\) and a positive constant \(K_{i}\) such that
$$\begin{aligned} e ^{ -\int _{s}^{t}c_{i}(u)du}\le K_{i} e ^{ -\int _{s}^{t}\tilde{c}_{i}(u)du} \quad \text{ for } \text{ all } t,s\in \mathbb {R}\quad \text{ and } \quad t-s\ge 0. \end{aligned}$$ -
\((H_1)\) there exist nonnegative constants \(L^{f}_{j}\), \(L^{g}_{j}\) and \(L^{\tilde{g}}_{j}\) such that
$$\begin{aligned} |F_{j}(u )-F_{j}(v )|\le L ^{f}_{j}|u -v |, |G_{j}(u )-G_{j}(v )| \le L^{g}_{j}|u -v |, \ |\tilde{G}_{j}(u )-\tilde{G}_{j}(v )| \le L^{\tilde{g}}_{j}|u -v |, \end{aligned}$$\(\text{ for } \text{ all } \ u, \ v \in \mathbb {R}\).
-
\((H_{2})\) the delay kernel \(\sigma _{ij } :[0, +\infty )\rightarrow \mathbb {R}\) is continuous, and \(|\sigma _{ij }(t)|e^{\kappa t}\) is integrable on \([0, +\infty )\) for a certain positive constant \(\kappa\).
-
\((H_3)\) there exist positive constants \(\xi _{1}, \xi _{2},\ldots , \xi _{n}\) and \(\Lambda _{1}, \Lambda _{2},\ldots , \Lambda _{n}\) such that
$$\begin{aligned}&\sup \limits _{t\in \mathbb { R}} \frac{1}{\tilde{c}_{i}(t)} K_{i}\left[ |c_{i}(t)q_{i}(t)| +\xi _{i}^{-1}\sum ^n_{j=1}|a_{ij}(t)| L^{f}_{j} \xi _j +\xi _{i}^{-1} \sum \limits _{j=1}^{n}|b_{ij}(t)|L^{g}_{j} \xi _j \right. \\&\left. \quad +\xi _{i}^{-1} \sum \limits _{j=1}^{n}|d_{ij}(t)| \int _{0}^{\infty }|\sigma _{ij}(u)| du L^{\tilde{g}}_{j} \xi _j \right] <\Lambda _{i}, \end{aligned}$$$$\begin{aligned}&\sup \limits _{t\in \mathbb {R}}\left\{ -\tilde{c}_{i}(t)+K_{i}\left[ \frac{ 1 }{1- q_{i} ^{+} }|c_{i} (t)q_{i} (t)| + \xi _{i}^{-1}\sum ^n_{j=1} |a_{ij} (t)| L^{f}_{j}\xi _{j}\frac{1}{1- q_{j} ^{+}} \right. \right. \\&\quad \left. \left. + \xi _{i}^{-1}\sum ^n_{j=1} |b_{ij} (t)| L^{g}_{j}\xi _{j} \frac{1}{1- q_{j} ^{+} } + \xi _{i}^{-1}\sum ^n_{j=1}|d_{ij} (t)| L^{\tilde{g}}_{j} \int _{0}^{+\infty }|\sigma _{ij} (u)| du \xi _{j} \frac{1}{1- q_{j} ^{+} } \right] \right\} < 0, \end{aligned}$$and
$$\begin{aligned} q_{i} ^{+}+\Lambda _{i}<1. \end{aligned}$$
Remark 2.1
It follows from \((H_{3})\) that we can choose a constant \(\lambda \in (0, \ \min \{\kappa , \ \min \limits _{i\in J}\tilde{c}_{i} ^{-}\})\) such that \(1- p_{j} ^{+}e^{\lambda r_{j} ^{+} }>0,\)
and
3 Main results
Theorem 3.1
Let \((H_{0})\), \((H_{1})\), \((H_{2})\) and \((H_{3})\) hold. Then, there exists a unique \(T-\) anti-periodic solution \(x^{*}(t)\) of (1.1), and every solution x(t) of (1.1) with initial condition (1.2) converges exponentially to \(x ^{* }(t )\) as \(t\rightarrow +\infty .\)
Proof
Let
We obtain from (1.1) that
Define
Then, arguing as that in the proof of Lemma 2.1 in [28], from (2.1)–(2.4), we can show that \(x ^{\varphi } \in AP^{T}.\) Moreover, we define a mapping \(Q:AP^{T} \rightarrow AP^{T}\) by setting
It follows from (2.5), (3.2), (3.3), (\(H_{0}\)), (\(H_{1}\)), (\(H_{2}\)) and (\(H_{3})\) that
and
which implies that the mapping \(Q :AP^{T} \longrightarrow AP^{T}\) is a contraction mapping, and so it possesses a unique fixed point \(x^{**}=\{x_{i}^{**}(t)\}\in AP^{T}\) such that
and
which involves that \(x^{**}(t)\) is a \(T-\)anti-periodic solution of system (3.1). So (1.1) has a \(T-\)anti-periodic solution \(x^{* }(t)=\{\xi _{i}x_{i}^{**}(t)\}\).
Finally, we prove that \(x^{*}(t)\) is globally exponentially stable. Suppose that \(x(t)=\{x_{i}(t)\}\) is an arbitrary solution of (1.1) associated with initial value \(\phi (t)=\{\phi _{i}(t)\}\) satisfying (1.2).
Let
and
Then
Let
For any \(\varepsilon>0\), we obtain
and
where M is a sufficiently large constant such that
In the following, we will show
Otherwise, there must exist \(i\in J\) and \(\theta>0\) such that
Furthermore,
\(\text{ for } \text{ all }\ \ \nu \in (- \infty , \ t], \ t \in (- \infty , \ \theta ), j\in J,\) which entails that
Note that
Multiplying both sides of (3.13) by \(e ^{ \int _{0}^{s}c_{i}(u)du}\), and integrating it on \([0, \ \theta ]\), with the help of (2.6), (3.1), (3.6)–(3.8), (3.10) and (3.12), we obtain
which contradicts the first equation in (3.10). Hence, Eq. (3.9) holds. Letting \(\varepsilon \longrightarrow 0^{+}\), we have from Eq. (3.9) that
Then, by a similar argument as the proof of (3.11) and (3.12), it follows from (3.18) that
and
which ends the proof.\(\square\)
Remark 3.1
Because neutral type cellular neural networks with D operator is a class of D-operator-based NFDEs, the stability of its anti-periodic solutions is not easy to be established. Here, the map construction (3.3) and the variable substitution \(Y_{i}(t)=y_{i} (t)-q_{i}(t)y_{i} (t-r_{i}(t))\) play a key role in the proof of Theorem 3.1, which can be used to analyze the anti-periodic solution problem for other D-operator-based NFDEs.
4 An example and its numerical simulations
Example 4.1
Let
Obviously,
and the D operator satisfies
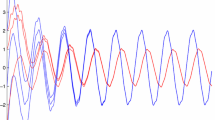
This implies that neutral type CNNs (1.1) with parameters (4.1) satisfies all the conditions mentioned in Sect. 2, so it has a unique anti-periodic solution \(x^{*}(t)\in AP^{\pi }(\mathbb {R},\mathbb {R}^{2})\). Moreover, all solutions of system (1.1) with (4.1) and initial value (1.2) converge exponentially to \(x^{*}(t)\) as \(t\rightarrow +\infty.\) Here, the exponential convergence rate \(\lambda \approx 0.01\). This can be seen by the numerical simulations given in Fig. 1.

Remark 4.1
In Example (4.1), the problem of global exponential stability of anti-periodic solutions of neutral type CNNs (1.1) with parameters (4.1) and D operator (4.2) has not been studied before. One can see that all results obtained in [8–31] are invalid for Example (4.1).
Remark 4.2
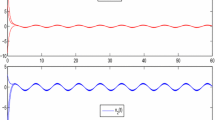
In Example 3.1, replacing \(c_{1}(t)= \frac{1}{10}(1+\frac{3}{2}\sin 10 t)\) and \(c_{2}(t)= \frac{1}{10}(1+\frac{3}{2}\cos 10 t)\) with \(c_{1}(t)=-8\) and \(c_{2}(t)=-13\), respectively, it is easily to see that \((H_{0})\) and \((H_{3})\) are not satisfied. Some numerical simulations in Fig. 2 illustrate that the exponential stability does not exist. This demonstrate the validity of the theoretical result of this paper.

Numerical solutions \(x(t)=(x_1(t),x_2(t))^T\) of system (4.1) with \(c_{1}(t)=-8\) and \(c_{2}(t)=-13\) for initial values \((200,-300)^T\)
5 Conclusions
In this paper, a class of neutral type cellular neural networks described by neutral functional differential equations with D operator is considered. By means of fixed point theorem, Lyapunov functional method and differential inequality techniques, it is the first time to derive criteria on the existence and global exponential stability of anti-periodic solutions of the addressed model. Many adjustable parameters are introduced in criteria to provide flexibility for the design and analysis of the system. The results of this paper are new and they supplement previously known results. The method affords a possible method to analyze the global exponential stability of anti-periodic solutions for other neural networks with neutral type delays and D operator.
References
Chua LO, Yang L (1988) Cellular neural networks: application. IEEE Trans Circuits Syst 35:1273–1290
Rawat A, Yadav RN, Shrivastava SC (2012) Neural network applications in smart antenna arrays. Int J Electron Commun 66:903–912
Haykin S (1994) Neural networks: a comprehensive foundation. Prentice Hall, New York
Cohen MA, Grossberg S (1983) Absolute stability of global pattern formation and parallel memory storage by competitive neural networks. IEEE Trans Syst Man Cybern 13:815–826
Wu J (2001) Introduction to neural dynamics and signal trasmission delay. Walter de Gruyter, Berlin
Kwon O, Lee S, Park J (2010) Improved results on stability analysis of neuralnet works with time-varying delays: novel delay-dependent criteria. Mod Phys Lett B 24:775–789
Kwon O, Park J (2009) Exponential stability analysis for uncertain neural networks with interval time-varying delays. Appl Math Comput 212:530–541
Liu B (2016) Finite-time stability of CNNs with neutral proportional delays and time-varying leakage delays. Math Methods Appl Sci. doi:10.1002/mma.3976
Gui Z, Ge W, Yang X (2007) Periodic oscillation for a Hopfield neural networks with neutral delays. Phys Lett A 364(3–4):267–273
Xiao B (2009) Existence and uniqueness of almost periodic solutions for a class of Hopfield neural networks with neutral delays. Appl Math Lett 22:528–533
Mandal S, Majee NC (2011) Existence of periodic solutions for a class of Cohen–Grossberg type neural networks with neutral delays. Neurocomputing 74(6):1000–1007
Li L, Fang Z, Yang Y (2012) A shunting inhibitory cellular neural network with continuously distributed delays of neutral type. Nonlinear Anal Real World Appl 13:1186–1196
Liu B (2015) Pseudo almost periodic solutions for neutral type CNNs with continuously distributed leakage delays. Neurocomputing 148:445–454
Yu Y (2016) Global exponential convergence for a class of neutral functional differential equations with proportional delays. Math Methods Appl Sci 39:4520–4525
Yu Y (2016) Global exponential convergence for a class of HCNNs with neutral time-proportional delays. Appl Math Comput 285:1–7
Peng L, Wang L (2014) Periodic solutions for first order neutral functional differential equations with multiple deviating arguments. Ann Polon Math 111(2):197–213
Candan T (2016) Existence of positive periodic solutions of first order neutral differential equations with variable coefficients. Appl Math Lett 52:142–148
Yao L (2016) Global convergence of CNNs with neutral type delays and \(D\) operator. Neural Comput Appl. doi:10.1007/s00521-016-2403-8
Kuang Y (1993) Delay differential equations with applications in population dynamical system. Academic Press, New York
Liao X, Chen G, Sanchez EN (2002) Delay-dependent exponential stability analysis of delayed neural networks: an LMI approach. Neural Netw 15(7):855–866
Jiang A (2016) Exponential convergence for HCNNs with oscillating coefficients in leakage terms. Neural Process Lett 43:285–294
Liu X (2016) Improved convergence criteria for HCNNs with delays and oscillating coefficients in leakage terms. Neural Comput Appl 27:917–925
Liu B (2016) Global exponential convergence of non-autonomous cellular neural networks with multi-proportional delays. Neurocomputing 191:352–355
Huang Z (2016) Almost periodic solutions for fuzzy cellular neural networks with time-varying delays. Neural Comput Appl. doi:10.1007/s00521-016-2194-y
Huang Z (2016) Almost periodic solutions for fuzzy cellular neural networks with multi-proportional delays. Int J Mach Learn Cybern. doi:10.1007/s13042-016-0507-1
Ou C (2008) Anti-periodic solution for high-order Hopfield neural networks. Comput Math Appl 56:1838–1844
Shao J (2009) An anti-periodic solution for a class of recurrent neural networks. J Comput Appl Math 228:231–237
Long Z (2016) New results on anti-periodic solutions for SICNNs with oscillating coefficients in leakage terms. Neurocomputing 171(1):503–509
Wang W (2013) Anti-periodic solution for impulsive high-order Hopfield neural networks with time-varying delays in the leakage terms. Adv Differ Equations 2013(73):1–15
Gong S (2009) Anti-periodic solutions for a class of Cohen–Grossberg neural networks. Comput Math Appl 58:341–347
Zhou Q (2016) Anti-periodic solutions for cellular neural networks with oscillating coefficients in leakage terms. Int J Mach Learn Cybern. doi:10.1007/s13042-016-0531-1
Acknowledgements
The author would like to express the sincere appreciation to the editor and anonymous reviewers for their careful work and thoughtful suggestions that have helped improve this paper substantially.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Chen, Z. Global exponential stability of anti-periodic solutions for neutral type CNNs with D operator. Int. J. Mach. Learn. & Cyber. 9, 1109–1115 (2018). https://doi.org/10.1007/s13042-016-0633-9
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s13042-016-0633-9