
Abstract
The exact dynamic mode decomposition (DMD) was applied to the nonsequential image dataset obtained by the double-pulsed schlieren measurement of a supersonic impinging jet, and the effect of the dataset length on the obtained spatial modes and estimated frequencies of the aeroacoustic fields was investigated. The Mach number of the jet was 2.0, the Reynolds number based on the diameter of the nozzle exit was \(1.0\times 10^6\) and the distance between the nozzle exit and the flat plate was four times the nozzle diameter long. The DMD modes extract the characteristic pattern and its frequency that relate to the aeroacoustic fields. The estimated frequencies of DMD modes were compared with the acoustic spectra measured using microphones. The estimated frequency of the DMD mode that has the largest amplitude approximately coincides with that of the highest peak in the acoustic spectra regardless of the dataset length. However, the variation in the estimated frequencies of the high-order DMD modes increases when the dataset length is short. Although the estimated frequencies of the second and third DMD modes did not match the peak frequencies of the acoustic spectra, the estimation accuracy of the frequency of the modes can be improved by recalculating the frequency based on the wavelength of the corresponding spatial mode. The order of the amplitude of DMD modes did not agree with the order of the peak magnitude in the acoustic spectra, except for the first mode. This is because the schlieren method visualizes the density gradient resulting in emphasizing the high-frequency fluctuations. This mismatch was mitigated by correcting the acoustic spectrum considering the first derivative of the acoustic spectrum. Therefore, the verification of the estimation accuracy considering the data characteristics is important when the exact DMD analysis is applied to the noisy experimental data.
Graphical abstract

Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction
A supersonic impinging jet is widely used in various engineering fields while causing strong acoustic loads. In the aerospace engineering field, the launch of a rocket is a typical example Jiang et al. (2019). The sound power level of the acoustic wave of large-scale rockets reaches 200 dB, and strong acoustic waves are generated not only by the jet itself but also by the impingement of the jet to the launch pad (Tsutsumi et al. 2008). Those acoustic waves vibrate an artificial satellite and cause malfunctions. Therefore, the noise generation mechanism of the supersonic impinging jet has been investigated (e.g., Krothapalli et al. 1999; Alvi et al. 2002; Nakai et al. 2006; Nonomura et al. 2011, 2016; Gojon and Bogey 2018; Edgington-Mitchell 2019). The flow field of a supersonic impinging jet generally consists of free jet, jet impinging, and wall jet regions. The flow structure is complex due to shock waves and turbulence (Henderson 1966; Alvi et al. 2002). In addition, the peaky tone generated by aeroacoustic feedback loops becomes dominant in some cases. (Weightman et al. 2017; Gojon and Bogey 2019) The large-scale turbulent structures are generated in the downstream region due to the growth of the instability waves in the shear layer of the jet (Henderson and Powell 1993). When the large-scale turbulent structures impinge with the plate, pressure fluctuations are generated and propagate upstream (Krothapalli et al. 1999; Henderson et al. 2005; Sinibaldi et al. 2015). Then, the instabilities in the shear layer are promoted by the propagating acoustic waves, and the feedback loop is closed (Henderson and Powell 1993).
Despite the recent experimental equipment enables us to clearly measure the aeroacoustic fields with high spatial resolution (e.g., Akamine et al. 2018; Nguyen et al. 2019), the extraction of the fundamental phenomena from its large dataset is still difficult. Therefore, new techniques, such as data-driven analysis techniques, are required for this field.
Data-driven analysis techniques have been attracting attention in recent years because it allows us to find the physical insight of complex phenomena by extracting the dominant structures from measured data. The proper orthogonal decomposition (POD) (Berkooz et al. 1993) or the singular value decomposition is frequently used in studies of fluid dynamics (Tinney et al. 2008; Peng et al. 2016; Ozawa et al. 2018; Nagata et al. 2020) and reduced-order modeling (Perret et al. 2006; Nankai et al. 2019; Nonomura et al. 2021). It is a powerful statistical tool that can extract significant structures or patterns from a dataset. The dynamic mode decomposition (DMD) (Schmid 2010) is another choice to find the dominant structure. This method considers a linear dynamical system and identifies the system from a dataset and can approximate dynamical model systems with respect to coherent structures that grow, decay, and oscillate in time with a limited number of modes. Therefore, DMD can obtain both spatial structures and their corresponding frequencies at the same time. An example of the application of DMD is the study by Rowley et al. (2009) on jet flows, where they successfully extracted the flow structures with specific frequencies. Iyer and Mahesh (2016) also analyzed the shear layer instability of the jet in the boundary layer crossflow and found the dominant structure in the shear layer. Ohmichi et al. (2018) investigated three-dimensional fluid structures of buffeting flow on a swept wing by DMD. There are many attempts to identify the screech tone from the time-resolved schlieren images using POD or DMD (Li et al. 2021; Lim et al. 2020; Rao et al. 2020). They successfully identified the dominant mode using the compressed sensing approach. In addition to those efforts, the online implementation of DMD is recently devised (Nonomura et al. 2018, 2019b; Matsumoto and Indinger 2017).
The standard DMD assumes a sequential dataset, and such an assumption causes a severe limitation when applying the method for planar measurement data of high-speed flows (e.g., Duke et al. 2012; Edgington-Mitchell et al. 2015). This is because the sampling rate of typical high-speed cameras is not sufficient for the measurement of the time-resolved planar measurement of high-speed flows. The exact DMD is a more generalized method and can be applied to a nonsequential dataset, such as visualization images obtained by a double-pulsed measurement, which is a method that uses frame straddling to acquire a pair of two images in a quite short time. However, verification studies on the exact DMD applied to such nonsequential experimental data containing noise are vastly lacking. The accuracy of the frequency of the obtained modes was estimated from the nonsequential data by the exact DMD has not been discussed in detail, even though obtaining the frequency of certain modes is one of the main motivations to use DMD.
The present study applied the exact DMD to the nonsequential dataset obtained by the double-pulsed schlieren measurement of a supersonic impinging jet, and the effect of the dataset length on the obtained spatial modes and estimated frequencies of the DMD mode related to the aeroacoustic field was investigated. The applicability of the exact DMD on the noisy experimental data was evaluated by comparing the DMD modes with the acoustic spectrum measured using microphones.

Schematic diagram of impinging jet experiments
2 Experimental apparatus and analysis methods
The present experiments were conducted by using the supersonic jet generating device which is installed in the anechoic room (3 \(\times\) 3 \(\times\) 2 m) at Tohoku University shown in Fig. 1. This facility has been used for the evaluation of aeroacoustic fields of various configurations of jet (Ozawa et al. 2020a, b, 2021; Lee et al. 2021) and the results have been validated with numerical simulations Nonomura et al. (2019a). The flat plate on which the jet impinges was placed above the nozzle. The experimental conditions are shown in Table 1. The distance between the nozzle exit and the flat plate surface was set to be 40 mm. The supersonic jet nozzle was designed with a design Mach number of 2.0 by the method of characteristics, and the diameter of the nozzle exit was \(D=10\) mm. The nozzle pressure ratio was set to be 7.8 which is an ideally expanded condition, and thus, the jet Mach number was \(M_{\mathrm{j}}=2.0\).
2.1 Double-pulsed schlieren visualization
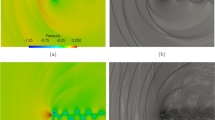
Figure 2 illustrates the schlieren system used in the present study. A Z-type schlieren optical system with parabolic mirrors of 200 mm in diameter and with a focal length of 2000 mm was used. The pulse light-emitting diode light (LED) source system that consists of an LED element (LE CG P3A 01-6V6W-1, OSRAM) and a pulse switching circuit was used as a light source of the schlieren visualization (Ozawa et al. 2020a). A knife-edge was placed on the focal point and the lower half of the focal point was cut. The schlieren images were recorded with a high-speed camera (Phantom V611, Vision Research). The schlieren images were acquired at a sampling rate of 2000 frame/s with a bit depth of 12 bits, while it is not sufficiently fast to obtain the time-resolved data. Image size and a number of snapshots are shown in Table 2. Figure 3 depicts the schematic of the double-pulsed schlieren system. The exposure time, which is constrained by the pulse width of the light source, for each frame was 400 ns. The interval between pulses was 1 µs, and the interval between paired images was 500 µs.

Schematic diagram of the schlieren optical system

Schematic diagram of the double pulsed schlieren system
2.2 Microphone measurement
Figure 4 illustrates the position of the microphone. The microphone was located at a position of 100 mm (\(r/D=10\)) in the 90\(^\circ\) direction around the nozzle exit for measuring the acoustic spectra near the nozzle. Acoustic measurements were made using a 1/4 inch microphone (TYPE4158N, ACO). The sensitivity and frequency response of the microphone are 3.2 mV/Pa and 200 kHz, respectively. Two DAQ analyzers (USB-6363, National Instruments) and a shielded connector block (BNC-2120, National Instruments) were used, and the signal amplified by a microphone amplifier (TYPE5006/4, ACO) was measured. The obtained time series data were processed by fast Fourier transform (FFT). The data length of the FFT was 1024 points and averaged 1000 times with an overlap of 50% of their length.

Schematic image of the positions for microphones
2.3 Dynamic mode decomposition
The dynamic mode decomposition was performed, and the dominant modes related to the aeroacoustic field were obtained from double-pulsed schlieren images. The advantage of DMD is that the mode decomposition, which is focusing on the time evolution of the time series data, allows us to obtain the eigenmodes and their corresponding frequencies. Although the standard DMD assumes a sequential dataset, our dataset, which is schlieren images acquired by a double-pulsed schlieren measurement, is a nonsequential dataset. Thus, the exact DMD (Tu et al. 2014) was employed in the present study.
Let us consider a sequential set of data vectors \(\left\{ \mathbf{x}_1,\ldots ,\mathbf{x}_m\right\}\). We assume that the data are generated by linear dynamics
for unknown matrix A. The DMD modes and eigenvalues approximate the eigenvectors and eigenvalues of A. The standard DMD firstly arranges two data matrices \(\mathbf{X}=[\mathbf{x}_1,\ldots ,\mathbf{x}_{m-1}]\) and \(\mathbf{X}^{'}=[\mathbf{x}_1,\ldots ,\mathbf{x}_{m}]\), and the matrix A is approximated as follows:
where \({\mathbf{U}_r}\), \({\mathbf{V}_r}\) and \({\varvec{\Sigma }}_r\) are the matrices obtained by the truncated singular value decomposition (SVD) remaining r largest singular values and corresponding singular vectors as follows:
For the particular eigenvalue of \({\tilde{\mathbf{A}}}\), the DMD mode is given by
where \(\mathbf{w}\) is the eigenvector of matrix \({\tilde{A}}\), which \(\mathbf{{\tilde{A}}w}=\lambda \mathbf{w}\). On the other hand, the DMD that can be used for nonsequential data, named the exact DMD, has been proposed. The restrictions on the dataset such as Eq. 1 are relaxed, and data pairs \(\left\{ (\mathbf{x}_1,\mathbf{y}_1),\ldots ,(\mathbf{x}_m,\mathbf{y}_m)\right\}\) are considered. The exact DMD can be defined for the following new data matrices
and Eq. 1 becomes as follows:
The matrix A in Eq. 6 is also constant for all k and can be obtained by the pseudoinverse operation as follows:
where \(\circ ^{\dagger }\) denotes the pseudoinverse operation. The matrix \({\tilde{\mathbf{A}}}\) for the exact DMD is
and the DMD mode \({\varvec{\Phi }}\) corresponding to eigenvalue \(\lambda\) is given by
Here, the amplitude of the DMD modes can be defined for each snapshot \(\mathbf{x}_k\) as follows:
where \({\mathbf {b}}^{(k)}\) is a vector of the DMD amplitude for the kth snapshot. This vector consists of the amplitudes of the ith DMD mode \(b_i^{(k)} \, (1\le i\le r)\). In this study, the amplitudes in the DMD spectrum are calculated by averaging those of all snapshots in the dataset. Therefore, the amplitude of the ith DMD mode can be calculated as follows:
3 Results and discussion
3.1 Basic characteristics of supersonic impinging jet
Figure 5 is an instantaneous schlieren image of the impinging jet where the distance between the nozzle exit and the impinging plate is 40 mm. The supersonic jet is operated at the ideally expanded condition of \(M_{\mathrm{j}}=2.0\) and flows from top to bottom of the image. The structures of shock waves, turbulent, and acoustic waves are clearly visualized. Note that the distribution of the density gradient in the streamwise direction of the jet that is integrated along the optical path of the schlieren system is visualized in these images. Shock cell structures are formed in the potential core of the supersonic jet. Wall jets are generated and flow along with the plate after the jet impinges on the plate. In addition to the acoustic waves generated from the jet itself, the strong acoustic waves are generated by the impingement.
Figure 6 shows the near-field acoustic spectra at \((x/D, r/D)=(0, 10)\) measured by the microphone measurements. A strouhal number was calculated based on a nozzle exit diameter of \(D=10\) mm and a nozzle exit velocity of 510 m/s. The flow velocity is calculated by assuming an isentropic flow. The sharp peaks of the frequency spectra correspond to the acoustic waves caused by the feedback loop, and their resonance waves are observed over a wide range of frequencies. The peak frequency, at which the maximum acoustic pressure is observed, is \(St=0.39\). Since the sound pressure level (SPL) of the peak reaches approximately 140 dB, the acoustic wave generated by the feedback loop is dominant. The next section discusses the accuracy of the estimated frequencies of the dominant acoustic waves predicted by the exact DMD.

Instantaneous schlieren image \((h/D=4)\)

Near-field acoustic spectra at \((x/D, r/D)=(0, 10)\).
3.2 Effect of dataset length on spatial and temporal DMD modes
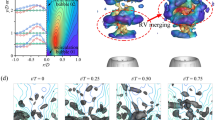
This section focuses on the verification of the exact DMD analysis using the double-pulsed schlieren image dataset. Figure 7a shows a comparison of the frequency spectrum of the acoustic waves obtained by the microphone measurement and the frequencies of the DMD mode estimated by the exact DMD. The spatial distributions of the DMD modes are shown in Fig. 7b. The screech-tone-frequency prediction formula proposed by Powell (1961) was applied to the estimated frequencies of the DMD modes.
The variables \(C_i\) and \(C_a\) are the velocity of the turbulent structures moving towards the wall surface and the sound speed of the ambient air, respectively. Here, \(C_i\) was assumed to be \(0.86U_j\) within the jet flow region in the present study. The variable N is an arbitrary constant, and p is a constant phase lag. The DMD frequencies estimated from the dataset of N5000 are shown in Table 3. The frequencies of the modes 1, 2, and 3 correspond to \(N=4\), 6, and 8, respectively. Here, \(C_i\) is optimized to minimize the variance of the estimated p for the three modes. This slightly larger convection velocity \(0.86U_j\) compared to the previous studies is estimated only by the assumptions that p is constant and that the convection velocity does not change with the modes. Since the objective of the present study is the investigation of the effect of the dataset length on the exact DMD analysis of the noise-contaminated dataset, the further discussion of the feedback loop with investigating the convective velocity is out of the scope of our study and left for future studies.
Figure 8 shows the distribution of the eigenvalues of the system identified by the exact DMD on the complex plane with the unit circle. All the eigenvalues are within the unit circle, and thus, all the obtained DMD modes are decaying modes. This is because that the standard DMD tends to estimate the dumping mode when applying it to the noise-contaminated dataset.
The DMD modes seem to extract the dominant aeroacoustic field. However, the frequencies of DMD modes did not match the acoustic spectrum, and the DMD modes tend to appear on the high-frequency side rather than the low-frequency side. Therefore, further analysis was performed and verified the characteristics of the exact DMD analysis.

Exact DMD with schlieren images

The eigenvalues calculated by DMD
The effect of the dataset length on the obtained spatial and temporal DMD modes is discussed. A similar verification for the singular value decomposition has been conducted by Nagata et al. (2019). They provided the sensitivity of the dataset length of time-series noisy schlieren images to the obtained spatial modes. The dataset length and number of image pairs in each dataset are shown in Table 4. The dataset length N is defined as the number of image pairs acquired by the double-pulsed schlieren visualization. The maximum number of image pairs was 5000 in the present analysis, and three kinds of dataset lengths were defined for the analysis: at 5000, 2500, and 1250 pairs. In addition, multiple datasets are defined without overlapping for the cases in which the data length is shorter than its maximum. For example, in the case of N2500, those datasets are named N2500_1 and N2500_2 where the subscript indicates the segment number of the datasets. The same rule was applied to the case of N1250. Here, the leading 30 singular values and corresponding singular vectors were retained in the truncated SVD operation (Eq. 3) regardless of the dataset length. This truncation is relatively strong because remaining a large number of modes leads to a larger estimation error due to the noisy experimental data. Therefore, the 30 eigenvectors including the complex conjugate eigenvalues are computed by the exact DMD.

Near-field acoustic spectra and the amplitude of DMD modes estimated from three kinds of dataset length
Figure 9 shows the near-field acoustic spectra and the frequency of each DMD mode calculated from three datasets of different data lengths. Note that only 15 DMD modes are shown in this spectrum, because the other 15 DMD modes are complex conjugates and have the same frequencies as their counterparts. Here, the modes with high amplitude are referred to as low-order modes. The frequency of the first DMD mode approximately coincides with that of the highest peak in the acoustic spectra regardless of the dataset length. Moreover, the second mode appears at the same frequency in all the dataset lengths. However, the acoustic peak of which the frequency matches with that of the second mode is not observed in the acoustic spectra. On the other hand, the frequency of the third mode of N1250_1 is different from that calculated from the other longer dataset. Therefore, the estimated frequency of DMD modes is no longer consistent with respect to the dataset length, while the peak frequency of the acoustic spectra matches with that of the third mode in the case of longer datasets. Since the estimated frequency of the high-order modes differs for each dataset length, the high-order DMD modes have more variation in the estimated frequency.

The spatial distribution of the first three DMD modes of the DMD
Figure 10 shows the spatial distribution of the real part of the first three DMD modes, which are the three highest amplitude modes. The extracted DMD modes correspond to those shown in Fig. 9 with markers. The first DMD mode of which the frequency does not change with the dataset length shows the same pattern except for the case of N1250_4. These modes are asymmetric with respect to the centerline of the nozzle and exhibit the patterns of the reflected acoustic waves as well as the acoustic waves generated from the jet itself. The second mode shows asymmetric patterns with a smaller wavenumber compared to the first mode. The pattern of the second mode of N1250_4 is different from that of the other dataset, but it is similar to that of the first mode. In the case of the third mode, the spatial pattern basically shows a symmetric pattern, although the spatial pattern of N1250_1 is completely different from the other cases. Therefore, the estimation accuracy of the frequency of DMD modes becomes unstable if the dataset length is short.
Figure 11 shows the variation in the estimated frequency and amplitude of each DMD mode with respect to the peak frequency of the acoustic spectra indicated by the dashed line. The frequencies of the first three DMD modes are estimated to be similar values for all the dataset lengths. In the case of the first mode, the estimated frequency of N1250_4 deviates from that of the other cases. This is consistent with that the spatial pattern of N1250_4 shows a different pattern compared with the other cases as shown in Fig. 10. In addition, the first mode of N1250_4 is close to the frequency of the second mode (\(St=0.548\)), and the second mode of N1250_4 is close to the frequency of the first mode (\(St=0.394\)). Thus, the order of the modes was considered to be swapped. A similar trend can be observed in the second mode of N1250_4. This indicates that the mode exhibiting a similar spatial pattern has a similar frequency. On the other hand, the majority of the estimated frequency of the second mode was found to be shifted from the peak frequency of the acoustic spectra. Therefore, the evaluation of the frequency estimation accuracy is important for the discussion of physics when applying the exact DMD analysis to the noise-contaminated dataset, such as experimental data.

Variation of DMD amplitude and frequency
3.3 Frequency correction based on spatial mode
The discrepancy between the peak frequency of the acoustic spectra and the estimated frequency of DMD modes is investigated in this section. The estimated frequencies of the second mode were shifted from the peak frequency of the acoustic spectra, as shown in Fig. 9. Therefore, the frequencies of DMD modes were recalculated based on the wavelength of the acoustic waves to account for this discrepancy. This method is based on the assumption that the spatial pattern of the DMD modes depicts the dominant acoustic waves traveling with the ambient sound speed. The wavelengths of the acoustic waves were directly measured from the phase diagram of the spatial mode at ten locations, and the frequency was calculated using the averaged value of the measured wavelength. Since the measurement point of the wavelength is sufficiently far from the jet, the value of the sound speed can be assumed to be 340 m/s. Figure 12 shows the frequency calculated from the wavelength of each DMD mode, and the peak frequency of the acoustic spectrum indicated by the dashed line. The recalculated frequency basically becomes closer to the peak frequency of the acoustic spectrum compared with the frequency estimated by the exact DMD shown in Fig. 11. However, the recalculated frequencies of the first and second modes of N1250_4 do not agree well with the peak frequency of the acoustic spectrum. In addition, the recalculated frequency of the third mode of N1250_1 is still away from the acoustic spectrum. This trend agrees well with that observed in the spatial distribution of DMD modes shown in Fig. 10. Determination of the spatial distribution sometimes becomes unstable when the dataset is short. In such a case, the accuracy of the frequency accuracy does not improve so much even if it is recalculated from the spatial distribution.
Although the acoustic spectra are shown in Fig. 9 have relatively large peaks in the low-frequency side (St \(\le 0.3\)), the DMD modes of which frequency agrees with those peaks cannot be observed in the present analysis. This seems to be due to the characteristics of the schlieren images, which visualize the first derivative of the density field and the high-frequency component tends to be emphasized. Therefore, the DMD modes with peak frequencies at the high-frequency side were extracted as leading modes, even though the SPL obtained by microphone measurement at those frequencies is relatively smaller than that at the low frequencies. Thus, the corrected frequency spectrum was calculated. The acoustic pressure \(p = p_0 \times 10 ^ \mathrm{SPL / 20}\) is derived from \(\mathrm{SPL} = 20\log _{10} {(p/p_0)}\), where \(p_0\) is a reference pressure corresponding to 20 µPa. If the acoustic waves are assumed to be sinusoidal waves, the first derivative of the acoustic pressure is equal to the acoustic pressure multiplied by the frequency f. Therefore, the corrected frequency spectrum can be calculated as \(\mathrm{SPL}_{\mathrm{corr}} = 20 \log _{10} 2\pi f \times (p/p_0)\).
Figure 13a shows a comparison of the estimated frequency of the leading three modes calculated from the wavelength of each spatial DMD mode (N5000) and the frequency spectrum obtained by the microphone measurement. The corrected spectrum is shown in Fig. 13b, and the high-frequency side is emphasized. Before the acoustic spectrum was corrected, the order of the magnitude of SPL at each peak frequency and that of the amplitude of the second and third DMD modes did not match, except the first mode. In particular, there is a large peak on the low-frequency side, but the modes that have those frequencies could not be estimated as the leading modes by the exact DMD. The peak on the high-frequency side became large after the spectrum was corrected, and the order of the magnitude of SPL at each peak frequency and the order of the magnitude of the mode are not exactly, but roughly matched with each other.

Recalculated peak frequencies of the acoustic spectrum and estimated frequencies of the leading DMD modes

Comparison of acoustic spectrum and frequencies of the leasing DMD modes before and after correction (N5000)
4 Conclusions
The exact DMD analysis was applied to the double-pulsed schlieren images of the supersonic impinging jet at \(M_{\mathrm{j}}=2.0\), and the effect of the dataset length on the estimated DMD modes were investigated. The obtained results are summarized as follows.
-
Spatial modes related to the aeroacoustic field and those frequencies were successfully extracted from the dataset of double-pulsed schlieren images using the exact DMD. It was demonstrated that the exact DMD can be used to extract flow dynamics from non-time-resolved datasets to help understand aeroacoustic phenomena.
-
The estimated frequency of the mode that has the largest DMD amplitude approximately coincides with that of the highest peak in the acoustic spectrum regardless of the dataset length in the tested range.
-
The variation in the estimated frequencies of the high-order DMD modes increases when the dataset length is short. Therefore, the verification of the estimation accuracy is important when the exact DMD analysis is applied to the noise-contaminated dataset, such as experimental data.
-
Although the estimated frequencies of the second and third DMD modes might be interchanged, they were consistent even if the dataset length was changed. However, those frequencies did not match the peak frequencies of the acoustic spectrum. The estimation accuracy of the frequencies estimated by DMD can be improved by recalculating the frequencies based on the wavelength of the corresponding spatial mode.
-
The order of the amplitude of the second and third DMD modes did not agree with that of the peak magnitude in the acoustic spectra, except for the first mode. In particular, there is a large peak on the low-frequency side, but the DMD modes that have those frequencies could not be estimated by the exact DMD. This is because the schlieren method visualizes the density gradient resulting in the emphasized high-frequency fluctuations. This mismatch was mitigated by correcting the spectrum considering the first-order temporal derivative of the acoustic spectrum. Therefore, it is necessary to consider the characteristics of the data when discussing the frequencies of dominant phenomena.
References
Akamine M, Okamoto K, Gee KL, Neilsen TB, Teramoto S, Okunuki T, Tsutsumi S (2018) Effect of nozzle-plate distance on acoustic phenomena from supersonic impinging jet. AIAA J 56(5):1943–1952
Alvi FS, Ladd JA, Bower WW (2002) Experimental and computational investigation of supersonic impinging jets. AIAA J 40(4):599–609
Berkooz G, Holmes P, Lumley JL (1993) The proper orthogonal decomposition in the analysis of turbulent flows. Annu Rev Fluid Mech 25(1):539–575
Duke D, Soria J, Honnery D (2012) An error analysis of the dynamic mode decomposition. Exp Fluids 52(2):529–542
Edgington-Mitchell D (2019) Aeroacoustic resonance and self-excitation in screeching and impinging supersonic jets-a review. Int J Aeroacoustics 18(2–3):118–188
Edgington-Mitchell DM, Amili O, Honnery DR, Soria J (2015) Measuring shear layer growth rates in aeroacoustically forced axisymmetric supersonic jets. In: 21st AIAA/CEAS aeroacoustics conference, p 2834
Gojon R, Bogey C (2018) Flow features near plate impinged by ideally expanded and underexpanded round jets. AIAA J 56(2):445–457
Gojon R, Bogey C (2019) Effects of the angle of impact on the aeroacoustic feedback mechanism in supersonic impinging planar jets. Int J Aeroacoustics 18(2–3):258–278
Henderson B, Powell A (1993) Experiments concerning tones produced by an axisymmetric choked jet impinging on flat plates. J Sound Vib 168(2):307–326
Henderson B, Bridges J, Wernet M (2005) An experimental study of the oscillatory flow structure of tone-producing supersonic impinging jets. J Fluid Mech 542:115–137
Henderson L (1966) Experiments on the impingement of a supersonic jet on a flat plate. Zeitschrift für angewandte Mathematik und Physik ZAMP 17(5):553–569
Iyer PS, Mahesh K (2016) A numerical study of shear layer characteristics of low-speed transverse jets. J Fluid Mech 790(10):275–307
Jiang C, Han T, Gao Z, Lee CH (2019) A review of impinging jets during rocket launching. Prog Aerosp Sci 109:100547
Krothapalli A, Rajkuperan E, Alvi F, Lourenco L (1999) Flow field and noise characteristics of a supersonic impinging jet. J Fluid Mech 392:155–181
Lee C, Ozawa Y, Haga T, Nonomura T, Asai K (2021) Comparison of three-dimensional density distribution of numerical and experimental analysis for twin jets. J Vis 24(6):1173–1188
Li X, Liu N, Hao P, Zhang X, He F (2021) Screech feedback loop and mode staging process of axisymmetric underexpanded jets. Exp Thermal Fluid Sci 122:110323
Lim H, Wei X, Zang B, Vevek U, Mariani R, New T, Cui Y (2020) Short-time proper orthogonal decomposition of time-resolved schlieren images for transient jet screech characterization. Aerosp Sci Technol 107:106276
Matsumoto D, Indinger T (2017) On-the-fly algorithm for dynamic mode decomposition using incremental singular value decomposition and total least squares. arXiv preprint arXiv:170311004
Nagata T, Noguchi A, Nonomura T, Ohtani K, Asai K (2019) Experimental investigation of transonic and supersonic flow over a sphere for Reynolds numbers of \(10^3\)-\(10^5\) by free-flight tests with schlieren visualization. Shock Waves 30:139
Nagata T, Noguchi A, Kusama K, Nonomura T, Komuro A, Ando A, Asai K (2020) Experimental investigation on compressible flow over a circular cylinder at Reynolds number of between 1000 and 5000. J Fluid Mech 893:A13
Nakai Y, Fujimatsu N, Fujii K (2006) Experimental study of underexpanded supersonic jet impingement on an inclined flat plate. AIAA J 44(11):2691–2699
Nankai K, Ozawa Y, Nonomura T, Asai K (2019) Linear reduced-order model based on piv data of flow field around airfoil. Trans Jpn Soc Aeronaut Space Sci 62(4):227–235
Nguyen DT, Maher B, Hassan Y (2019) Effects of nozzle pressure ratio and nozzle-to-plate distance to flowfield characteristics of an under-expanded jet impinging on a flat surface. Aerospace 6(1):4
Nonomura T, Goto Y, Fujii K (2011) Aeroacoustic waves generated from a supersonic jet impinging on an inclined flat plate. Int J Aeroacoustics 10(4):401–425
Nonomura T, Honda H, Nagata Y, Yamamoto M, Morizawa S, Obayashi S, Fujii K (2016) Plate-angle effects on acoustic waves from supersonic jets impinging on inclined plates. AIAA J 54(3):816–827
Nonomura T, Shibata H, Takaki R (2018) Dynamic mode decomposition using a kalman filter for parameter estimation. AIP Adv 8:105106
Nonomura T, Nakano H, Ozawa Y, Terakado D, Yamamoto M, Fujii K, Oyama A (2019) Large eddy simulation of acoustic waves generated from a hot supersonic jet. Shock Waves 29:1133
Nonomura T, Shibata H, Takaki R (2019) Extended-kalman-filter-based dynamic mode decomposition for simultaneous system identification and denoising. PLoS ONE 14(2):e0209836
Nonomura T, Nankai K, Iwasaki Y, Komuro A, Asai K (2021) Quantitative evaluation of predictability of linear reduced-order model based on particle-image-velocimetry data of separated flow field around airfoil. Exp Fluids 62:112
Ohmichi Y, Ishida T, Hashimoto A (2018) Modal decomposition analysis of three-dimensional transonic buffet phenomenon on a swept wing. AIAA J 56(10):3938–3950
Ozawa Y, Nonomura T, Anyoji M, Mamori H, Fukushima N, Oyama A, Fujii K, Yamamoto M (2018) Identification of acoustic wave propagation pattern of a supersonic jet using frequency-domain pod. Trans Jpn Soc Aeronautical Space Sci 61(6):281–284
Ozawa Y, Ibuki T, Nonomura T, Suzuki K, Komuro A, Ando A, Asai K (2020) Single-pixel resolution velocity/convection velocity field of a supersonic jet measured by particle/schlieren image velocimetry. Exp Fluids 61(6):1
Ozawa Y, Nonomura T, Oyama A, Asai K (2020) Effect of the reynolds number on the aeroacoustic fields of a transitional supersonic jet. Phys Fluids 32(4):046108
Ozawa Y, Nonomura T, Saito Y, Asai K (2021) Aeroacoustic fields of supersonic twin jets at the ideally expanded condition. Trans Jpn Soc Aeronaut Space Sci 64(6):312–324
Peng D, Wang S, Liu Y (2016) Fast psp measurements of wall-pressure fluctuation in low-speed flows: improvements using proper orthogonal decomposition. Exp Fluids 57(4):45
Perret L, Collin E, Delville J (2006) Polynomial identification of pod based low-order dynamical system. J Turbul 7(17):N17
Powell A (1961) On the edgetone. J Acoust Soc Am 33(4):395–409
Rao AN, Kushari A, Chandra Mandal A (2020) Screech characteristics of under-expanded high aspect ratio elliptic jet. Phys Fluids 32(7):076106
Rowley CW, Mezić I, Bagheri S, Schlatter P, Henningson D et al (2009) Spectral analysis of nonlinear flows. J Fluid Mech 641(1):115–127
Schmid PJ (2010) Dynamic mode decomposition of numerical and experimental data. J Fluid Mech 656(July 2010):5–28
Sinibaldi G, Marino L, Romano GP (2015) Sound source mechanisms in under-expanded impinging jets. Exp Fluids 56(5):1–14
Tinney CE, Glauser MN, Ukeiley L (2008) Low-dimensional characteristics of a transonic jet. part 1. proper orthogonal decomposition. J Fluid Mech 612:107–141
Tsutsumi S, Takaki R, Shima E, Fujii K, Arita M (2008) Generation and propagation of pressure waves from h-iia launch vehicle at lift-off. In: 46th AIAA aerospace sciences meeting and exhibit, p 390
Tu JH, Rowley CW, Luchtenburg DM, Brunton SL, Kutz JN (2014) On dynamic mode decomposition: theory and applications. J Comput Dyn 1(2):391–421
Weightman JL, Amili O, Honnery D, Soria J, Edgington-Mitchell D (2017) An explanation for the phase lag in supersonic jet impingement. J Fluid Mech
Acknowledgements
The present work was supported by the Japan Society for the Promotion of Science, KAKENHI Grants No. JP20H00278 and JP19KK0361, and by Japan Science and Technology Agency, FOREST Grant Number JPMJFR202C. Y. Ozawa was supported by the Japan Society for the Promotion of Science, KAKENHI Grants 19H00800. T. Nagata was supported by Japan Science and Technology Agency, CREST Grant Number JPMJCR1763.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix
Appendix
1.1 Appendix: Effect of masked region on DMD spectra
Although the present study assumes that the acoustic waves propagate with the ambient sound speed, the schlieren image that is originally used for the DMD calculation includes the mainstream area of the jet with the different propagation speeds. This may induce the estimation error of the DMD calculation. Therefore, the exact DMD was performed on the schlieren images with the newly defined mask, which also masks the region of the mainstream area of the jet. Figure 14 shows a comparison of the DMD spectra with different masked regions and illustrates that the presence or absence of the jet region had almost no effect on the estimated frequencies of the DMD modes in the present dataset.

Comparison of the DMD spectra with different mask regions
1.2 Appendix: Effect of intermittency and dataset length on DMD amplitude
The relation between the intermittency and the deviation in the DMD amplitude was investigated. Figure 15 shows the scalogram of the microphone data calculated by the wavelet analysis. It was confirmed that the amplitude of screech tone changes within the measurement time due to the intermittency of the screech tone.

Scalogram of the microphone data
Figures 16 and 17 show the histograms of the DMD amplitude for each dataset length. Similar histograms were obtained for mode 1 and 2, respectively, regardless of the dataset length. However, only N1250_4 deviated from the others, where the amplitudes were swapped between the modes 1 and 2. This indicates that the intermittency of the screech tone is not related to the amplitude switching.

Histogram of the DMD amplitude of the first mode

Histogram of the DMD amplitude of the second mode

Effect of the dataset length in the estimated DMD amplitude
Figure 18 shows the relation between the dataset length and the estimated DMD amplitude. Additional cases of N1000 and N500 were computed and the average of the estimated amplitudes for each dataset was plotted. The error bars show the variation in the amplitude. This figure illustrates that the shorter dataset length results in a larger variation in the DMD amplitude. In the present data, the variation of the estimated amplitudes is sufficiently small at \(N\ge 2500\), and the amplitudes can be calculated stably.
Rights and permissions
About this article

Cite this article
Ohmizu, K., Ozawa, Y., Nagata, T. et al. Demonstration and verification of exact DMD analysis applied to double-pulsed schlieren image of supersonic impinging jet. J Vis 25, 929–943 (2022). https://doi.org/10.1007/s12650-022-00836-9
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12650-022-00836-9