
Abstract
This paper presents the use of infinite element boundary conditions for physical and engineering problems in a three-dimensional unbounded domain, subjected to seismic loading, with a view to compare results with the traditional viscous boundary. Boundary conditions are discussed in general with an emphasis on understanding the pros and cons of each method used. Also, a comparison is drawn between the different types of boundary conditions used for the optimal solution of physical problems especially the models under seismic loading. Infinite elements can be implemented easily with lesser computational time. It provides “quite” boundaries to the models and can be used effectively for the accurate numerical solutions of physical issues. This paper presents the complete details of node setting and numerical computation for the infinite element boundaries and compares results of a three-dimensional free field soil model and a soil–tunnel model under seismic loading using infinite boundary, and a similar model using a spring/dashpot system. The results verified the use infinite element boundary to evaluate the seismic behaviour of the model and suggest that in the time domain, this method can be combined easily with the finite element and other methods such as boundary element method directly.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
There are three methods that can be used to solve physical problems: empirical method, analytical method and numerical method. Over time, the numerical method of solving engineering problems and physical issues has emerged as the most efficient method, as other methods involve procedures that are costlier and more time-consuming. The procedures involve laboratory and centrifuge testing, which provide more reliable results. However, they need proper facilities, adequate time and a skilled workforce as the level of their proficiency can affect the test results. On the other hand, numerical simulation is one of the simplest, fastest and most economical methods, which is widely adopted by researchers across the globe to solve complex physical problems that cannot be solved using analytical and empirical techniques. Problems like filling earth pressure in large diameter cylinders sunk in the ground are very complicated, and using finite element models, this has been validated [1]. Another example involves the understanding of the mechanical behaviour of soil rock mixtures (S-RM) using the analytical or the empirical techniques. This is very complex in nature; however, through effective use of numerical methods it was easy to understand both the mechanical behaviour and the control mechanism [2]. While numerical methods help in solving complicated engineering problems, the process itself is very difficult. For achieving accurate results, factors like boundary conditions, meshing, constitutive models for materials, and all such parameters, should be accurately defined.
Earthquakes are a natural phenomenon, which have wide implications on structures, including risks to human life and property. It has challenged researchers as it is one of the most difficult and important physical issues and engineering problems. Structures, such as bridges, tunnels and high-rise buildings are often constructed on active fault zones, where the risk of earthquake damage is very high. Failures of such structures have been reported in many publications over the past many decades [3,4,5]. Investigating the behaviour of these structures against seismic forces is inevitable. It is therefore necessary to have a better understanding of the response of these structures to such governing forces. As per the recent researches conducted, the response of these structures is affected by the dynamic behaviour of the individual components and also the complex soil–structure interactions. During the earthquake, the foundation and the surrounding soil interact with the superstructure through changing stiffness and energy dissipation. This interacting behaviour is often referred to as inertial response in the literature [6]. The amount of energy dissipated and absorbed by the structures needs to be estimated correctly and used accordingly in the numerical models. Therefore, the correct use of boundary conditions, parameters and the values of various coefficients in the simulation is crucial in understanding the behaviour of the structures subjected to the earthquake loading conditions [7].
While working with numerical models and computer simulations, the first thing to take into account is the medium to work on. There are two main types of mediums used in numerical models: continuum and discontinuum. Based on the medium type, there are different techniques and methods used for numerical analysis. The most commonly used numerical analysis methods for continuum medium are finite element methods, infinite element method, finite difference or distinct element method, finite volume method, finite boundary method and meshless method. On the contrary, for discontinuum media, the methods available are discrete element method, discontinuous deformation analysis, bonded particle method and discrete fracture networks [8]. Additionally, there are also the hybrid methods such as the finite discrete element method. However, it has been noticed that most of the literature presented on the continuum materials used finite element method, and for discontinuum materials, the discrete element methods were used.
Physical problems in infinite domains are usually solved by introducing artificial boundaries (Abs). These boundaries simulate the response of the structures under dynamic loading conditions. The infinite element is a relatively new technique in numerical modelling; therefore, there is a lack of clarity about what infinite element is, how boundary conditions should be used and what results can be expected from it. While working on ABAQUS, it is important to understand its limitations. Computer models can map only a small part of the ground which is influenced by the earthquake, while the rest must be catered using an artificial boundary condition (infinite element boundary condition). For an accurate model, the energy generated by the dynamic loads entering the model must pass through a properly defined artificial model which can allow propagation of waves through them [9]. As per Saint-Venant’s principle, the effect of this artificial boundary is likely to lessen as the distance increase. Therefore, the boundary conditions should be modelled in a way that allows energy dissipation. The development of transmitting boundaries has seen new heights in the past few decades [10]. For absorption of energy, the spring/dashpot system as a viscous boundary [11] is usually used. Experiments show that the viscous spring boundary for the permeability values is more precise [12]. The use of infinite elements around the model is another method of energy absorption. Unlike a dashpot element, an infinite element does not require calculations of coefficients, which require knowledge of detailed material properties and mesh geometry.
This paper in general discusses the boundary conditions under seismic loading with an emphasis on infinite element boundary conditions and the dynamic analysis. A summary of previous works in the area is presented for the better understanding of the boundary conditions and details of infinite element boundary conditions, including the node structure for solid mediums and numerical computation of the energy absorbing boundary conditions. Further, a comparison is drawn between the infinite boundary conditions and the traditional spring/dashpot system for the models. For comparison reasons, the results are derived from a 3D free field model (soil model without tunnel) and a soil model with a tunnel, which are in an infinite domain under seismic loading. The software used for the model is ABAQUS, and the spring/dashpot system studied by [13] is used for the comparison. Summary of the comparison and results are also discussed.
2 Literature review
In numerical analysis, all parameters need to be properly defined in order to achieve logical results. Boundary conditions are an important factor affecting the results of the model. They are extensively used in numerical modelling as they are simple and cost-effective [14]. The simplest form of boundaries that can absorb energy is viscous boundaries, which were first used by [15]. In these boundaries, the dashpots are organized in a series, which are placed normally at the boundary nodes [16]. It is observed that in these boundary conditions, the optimal absorption is achieved only when the waves are perpendicular [16]. Therefore, when computing models in large domains, these boundaries should be placed at a distance from the source so that reasonable solutions can be achieved [17].
The standard viscous boundaries at low frequencies produce permanent displacements. This is another major drawback of the use of standard viscous boundaries, and several techniques have been developed to overcome this problem. An example of this is the cone boundary developed by [18]. It comprises of a spring and dashpot connected in parallel with each other and placed at the boundary nodes both normally and tangentially. The mechanism in this boundary is simple; the dashpot governs the absorbing potential, while the spring stiffness controls the deformation.
Another sub-structuring approach for the dynamic analysis was developed by [19]. It is called the domain reduction method (DRM). As the name suggests, this procedure primarily aims to reduce the domain by changing the variables. The dynamic analysis is carried about introducing the seismic loading directly into the computational domain, while the standard viscous boundaries or the dashpots are introduced to cater for the scattered energy of the system only. While this method was originally developed to deal with the problems of drained and undrained systems, [20] extended it further and used it for dynamic analysis.
A technique of using infinite boundary conditions for dynamic analysis was introduced by [21]. They developed an absorbing boundary element (BE) using integral equations based on Green’s theorem. This method has been successfully applied to numerical integration in the frequency domain [22] as well as for solving the volume integral (VI) equation via a velocity-weighted wave field, also formulated in the frequency domain [23,24,25]. This technique can be used to solve the Green’s function-based integral equations for wave propagation simulation in both 2D and 3D domains and can be used for both elastic and acoustic analyses. The experiments performed show that the method can absorb almost all unwanted waves. The approach is better than many typical absorbing boundary conditions and utilizes less memory and computing time.
A technique presented by [26] involves the use of the master–slave in ABAQUS, a contact surface that models the soil–structure interaction. This method divides the model into two distinct models: one called the master and the other slave. A user-defined contact surface is created to be used by the sub-models. The models eventually use this contact surface to trap wave scattering energy, as the structural element and the soil element independently handle the energy dissipation. Moreover, the nonlinear behaviour of the soil–structure interface can also be captured by the model. The analysis shows that the results achieved through this technique are accurate and confer the result of other commercially used programs.
3 Absorbing boundary element
3.1 Infinite element boundary conditions
Infinite elements are important for the dynamic analysis of the conditions, especially for the soil models where the surrounding medium is very large and the region of interest is comparatively small [27]. The infinite elements are generally used along with the finite elements [28, 29] in a way that the region of interest is modelled using finite element and the surrounding medium is modelled using infinite element making use of “quite” boundary conditions [30]. In dynamic analysis, when a fixed boundary condition is used, it traps the energy inside and causes reflection of the waves. A solution suggested by [31] is to maximize the domain enough so that the reflected waves cannot return to the region of interest. Infinite elements generally have linear behaviour and provide “quiet” boundaries to such models in unbounded domains and therefore can be ideally used for the dynamic analysis.
Kagawa et al. [32] presented a method of infinite element boundary discretization for the dynamic analysis in unbounded domains. In that, the entire unbounded zone was broken into smaller zones and the zone matrices were written in the form of the nodal quantities at the finite element nodes by using a series of numerical and analytical integration. This procedure is adopted to make solutions efficient as, during the coupling procedures, it conserves the banded nature of finite element matrices. Subsequently, the conditions for continuity and the compatibility of the zones are formulated. The boundary elements are formulated by eliminating all variables except the potentials. Finally, the equation for the potential is derived, which is in the form of a stiffness matrix–load vector. The procedures implemented to assemble the finite element are used to assemble this matrix into the global equation of finite element [33].
Infinite elements are typically used to perform three distinct analysis in ABAQUS, namely direct integration implicit dynamic response analysis, steady-state dynamic frequency-domain analysis and explicit dynamic analysis [34]. A direct integration implicit dynamic response analysis is used to study nonlinear dynamic response, dynamic response involving minimal energy dissipation, moderate energy dissipation and quasi-static responses. Steady-state dynamic frequency-domain analysis is used for linearized response of the system to harmonic excitation, in which the load is applied at different frequencies, and then, the response is then recorded. An explicit dynamic analysis is carried out to analyse large models with short dynamic response times. It can also be used for quasi-static analysis and adiabatic stress analysis.
In each of the dynamic analyses discussed above, infinite elements provide “quite” boundaries, through the effect of dumping matrix, to the models created using finite elements. The static force on the boundary at the start of the dynamic response remains unchanged. As a result, during the dynamic response, the displacement of the far-field nodes does not take place. During the dynamic steps, the infinite elements produce additional normal and shear traction on the finite element boundary. These tractions are proportionate to the normal components and shear components of the velocity. To minimize reflection, boundary damping constants are introduced. It is imperative to understand that the infinite elements do not provide any stiffness while keeping the stress constant during the dynamic response. Therefore, a small effect of the rigid body motion may be experienced in the modelled regions.
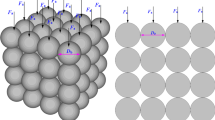
3.2 Defining nodes for the solid medium infinite elements
Since infinite elements work in conjunction with the finite element, the node numbers should be organized in such a manner that the face connected to the finite element in the mesh should be the first face. It is done because the nodes on the first phase are generally located in the mesh and all other nodes are positioned away from the mesh in the infinite domain. All such nodes located in infinite domains are unimportant and treated differently during the analysis. It is for this reason that loads and other boundary conditions are not applied on them.
However, in the infinite direction the position of the node plays a vital role in the solution. Each node in the infinite direction is concentrated about a pole (origin). For example, when a point load is applied to the boundary, the location of the pole would be exactly at the point of the application.
The distance of the node on the same edge of the boundary between the finite and the infinite elements is used as a standard for the second node. Ideally the distance of the second node from the pole on this boundary should be twice the distance of the first node. Few examples are illustrated in Figs. 1, 2 and 3.

Point load on elastic half space

Strip footing on infinitely extended layer of soil

Quarter plate with square hole
Moreover, while positioning the second node, it should be ensured that the element edges in the infinite direction should not merge with each other. Such crossovers can result into nonunique mappings, and ABAQUS would stop working (Fig. 4).

Example of a nonunique mapping
To avoid nonunique mapping, an easy way to handle these second nodes is to project the original nodes from the pole node (Fig. 5). The benefit of this technique would be that each new node created would be equidistant from the pole node and the old node. It is pertinent to mention that in such cases the pole node should be located at the centre of the far-field solution.

Projecting existing nodes from pole node
4 Numerical computation
What follows here is a review of the theory, adapted from Infinite Boundary Element Absorbing Boundary for Wave Propagation developed by [22].
The author has used an infinite BE approach to solve problems in frequency domain. Consider Fig. 6b, where \(\varOmega_{1}\) and \(\varOmega_{2}\) are the two homogeneous sub-domains having an interface TAB which can be defined by A < x < B (Fig. 7).

Two adjoined half-space models. (a) Model consisting of the interface TAB and two artificial boundaries T’∞ and T”∞. (b) Model after boundary transform

Two-layer models. (a) Model consisting of the free surface TAB, the interface TCD and two artificial boundaries denoted by dashed lines. (b) Model after the boundary transform
This interface TAB is further illustrated in Fig. 8a, which is similar to linear elements. As shown by the figure, r1 and r2 are the node position vectors located at the two ends of the element. The local coordinate ξ has a range of −1 to 1. The equation of the shape function can be written as:

Regular linear element for the frequency-domain BE scheme. Geometry of the element. (b) Shape functions
There is a linear variation in the element within a range of − 1 to 1 (shown in Fig. 8b). The coordinates, displacements and stresses at any point of the element can be given by:
For \(\varOmega_{1}\) and \(\varOmega_{2}\), respectively, the integral equation can be discretized at all node on TAB using Eq. (2). The discretized equations can then be assembled into the global matrix equation under the continuity of displacement and stress across the interface TAB. Displacement and stresses across all the nodes of the interface can be obtained by solving this matrix. Numerical integration on TAB can be used to compute the seismic response at any location. However, it is noted that the endpoints will yield strong diffractions in the computed seismic response. This can be resolved by extending them to infinity using an infinite boundary element. Figure 9a illustrates an infinite boundary element which is stretching from point A to infinity, where r0 represents a position vector at A and r1 represents a reference position vector. The coordinates at any point in this infinite boundary can be shown by:
where M∞1(ξ) and M∞2(ξ) are the infinite shape functions and can be shown by the equation:

Infinite boundary element for artificially ending point A in Fig. 1b. (a) Geometry of the element. (b) Infinite shape functions. (c) Damping functions for the unknowns (displacement and stress) in the infinite boundary element
There is a vivid nonlinear change (0 to − 1) in these infinite shape functions, which is shown in Fig. 9b. From the above equation, it is apparent that r(ξ) = r0 at ξ = 1, r(ξ) = r1 at ξ = 0 and r(ξ) = ∞ at ξ = −1. However, the previous discussions suggest that the unknowns (displacement and stress) at infinity are assumed to be null. Therefore, it can be concluded that in the infinite element they differ in the form of a damping exponential. Figure 9a shows an infinite boundary element where the displacement and stress are assumed to vary from node r0 as follows:
where f is decay function with respect to the local coordinate ξ and the frequencies. They specify the variation of the unknowns in the infinite direction from their values at node r0. For any specific problem, suitable damping functions can be chosen using empirical methods. However, numerical methods suggest that the optimal damping function for a 2D function is given by:
where H10() and H(1)1 () are Hankel’s functions of the first kind with zeroth order and first order, respectively, and r(ξ) = |r0 − r(ξ)|.
The decay performance of fu(ξ,k) in the infinite boundary element for four different frequencies is illustrated in Fig. 9c. Different curves shown in the figure correspond to different frequencies. Figure suggests that the damping is faster once the frequency is high. Figure 10a shows the infinite boundary element for the end point at x = B. The element direction is the positive x-direction which means that the functions need to modified and that can be written as

Infinite boundary element for the artificially ending point. (a) Geometry of the element. (b) Infinite shape functions. (c) Damping functions for the unknowns (displacement and stress)
The performance of the above equation is illustrated in Fig. 10b. The formulas for coordinates, displacements and stresses at a point in the infinite boundary element have different decay functions as illustrated in Fig. 10c primarily because of the reverse element direction. These formulas can be practically applied to solve a 3D problem; however, it will require minor modification. Below is an example of a quadrilateral infinite boundary element which is used for the calculation of 3D BE problem.
Figure 11 shows a curved interface extending to infinity. A and B are nodes located at the end edge of the curved interface. The position vector at any point on this interface can be given by

Quadrilateral infinite boundary element for 3D problems
In the equation above, \(M_{i}^{\infty } \left( \xi \right)\) are 2D infinite shape functions. These functions can be created by:
5 Results and discussion
One of the problems in the dynamic soil–structure analysis is the selection of an accurate boundary conditions that could resist the loads. In dynamic analysis, when a fixed boundary condition is used, it traps the energy inside and cause reflection of the waves. It is because the source of the earthquake is very deep, and the energy created due to wave propagation dissipates into infinity. Therefore, we require suitable boundary conditions capable of free field response in the vicinity of the boundaries. The standard boundary conditions that are used in static analysis (zero force and displacement) cannot simulate energy dissipation through them [18, 35]. A solution suggested by [31] is to maximize the domain large enough so that the reflected waves cannot return to the region of interest.
To understand the response of infinite element boundaries, a comparison is made between the results obtained from a three-dimensional free field soil model and a soil–tunnel model under seismic loading using an infinite boundary, and a similar model using a spring/dashpot system, studied by [13]. The time history of the earthquake imposed into the model is presented in Fig. 12. Figure 13a, b illustrates the spring/dashpot system and the infinite element as energy absorbing boundaries, respectively.

Time history of earthquake imposed into the model

Boundary conditions: (a) spring/dashpot system, (b) infinite element
Infinite element (CIN3D8 elements) has been used for the boundaries of the models in order to deter spurious reflection of waves to get real responses, while the rest were modelled using finite element (eight-node volume C3D8R elements). The length of the infinite elements was kept more than half of the model width.
The diameter of the circular tunnel used in the soil–tunnel model is 6 meters, concrete thickness is 30 cm, and the height of the soil overburden on the tunnel is 15 meters. The length and overall height of the external boundaries used in the model are 600 m and 40 m, respectively. Detailed properties of the soil and concrete used in the model are tabulated in Table 1. Soil and tunnel are modelled using finite element, while infinite element is used to model the region around the tunnel [36].
To calculate the Rayleigh damping coefficients for soil in the model, frequency analysis was performed before the seismic analysis. Based on the damping ratio, ξi can be calculated from Eq. (10).
where \(\omega_{i}\) (rad/s) is the natural frequency of mode i.
Thus, \(\alpha_{\text{M}}\) and \(\beta_{\text{K}}\) can be used to find any damping ratio of any modes. The damping amount of other modes can also be computed from Eq. (10).
Geostatic stress is usually the first step of a geotechnical analysis, followed by a coupled pore fluid diffusion/stress or static analysis procedure to verify that the initial geostatic stress field is in equilibrium with applied loads and boundary conditions. So, in the first step, these stresses were computed by application of gravity loading. Equation (11) was used for earth pressure or lateral coefficient at rest.
Depending on the soil thickness and the earthquake frequency content that passes through the soil, the intensity of the seismic waves may increase or decrease. Figure 14 shows the comparison of the maximum acceleration response across the soil in free field model for both infinite element and the spring/dashpot system analyses. The graph shows that the acceleration increases, as the wave propagates through the soil and reaches its peak on the soil surface. It can also be observed that the graph does not show much variation in the results for the infinite element boundaries and the spring/dashpot model.

Maximum acceleration response in both models (free field)
Acceleration response of seismic loading introduced at the base of the model will have a different behaviour. At a certain depth, the acceleration increases to its peak value and then variates till it reaches the soil surface. Figure 15 shows the comparison of the maximum acceleration response at various points in soil–tunnel model. It can be seen that the results are similar for both infinite element and the spring/dashpot system models.

Maximum acceleration response in both models (soil–tunnel)
In order to evaluate the behaviour of the materials, it is important to investigate the stress and strain created in the structures. For this purpose, the maximum principal stresses and strains created around the tunnel in the infinite element model are compared with the model using spring/dashpot system. Comparison of the maximum principal stress and strain in both models is shown in Figs. 16 and 17, respectively.

Comparison of the maximum principal stresses in both models

Comparison of the maximum strains in both models
It is evident from the graphs that the values of maximum principal stress and stains are same for the both the models. Hence, it can be concluded that infinite elements can be used as energy absorbing boundaries, which are as effective as the spring/dashpot boundaries.
6 Conclusions
The paper presented the infinite element boundary conditions for the dynamic analysis of structures under seismic loading and compared the results with a standard dashpot/spring boundary system. The viscous boundary is one of the most commonly used techniques for dynamic analysis, which uses dashpots in series arrangement. The boundary absorbs energy optimally when the waves are perpendicular to the dashpots. At low frequencies, these boundaries produce permanent displacements. A technique to overcome this problem is the use of cone boundary, where the spring and dashpot are connected to each other in parallel. This arrangement helps the dashpot to absorb the energy, while the spring stiffness controls the deformation. In domain reduction method (DRM), the dynamic analysis is carried by introducing the seismic loading directly into the computational domain, while the dashpots only absorb the scattered energy in the unbounded domain.
The infinite element boundary in ABAQUS is used for several types of dynamic analysis, i.e. direct integration implicit dynamic response analysis, steady-state dynamic frequency-domain analysis and explicit dynamic analysis. In each of the dynamic analysis discussed above, infinite elements provide “quite” boundaries to the models. The static force on the boundary at the start of the dynamic response remains unchanged; as a result, during the dynamic response the displacement of the far-field nodes does not take place. This technique minimizes the hitches faced in the use of conventional techniques and utilizes lesser space and lesser computational time. The method was used in the paper to compare results of a three-dimensional free field soil model and a soil–tunnel model under seismic loading using infinite boundary, and a similar model using a spring/dashpot system.
The results of the maximum acceleration response and the maximum principal stress and strain show similarity in both the systems, which is an indication of the fact that infinite element boundaries can be used effectively as absorbing boundaries. The verification of seismic behaviour of the tunnel using the infinite element boundary condition shows that the method suggested is successful, and in the time domain, it can be combined with the finite element. The results demonstrated a very good performance of the scheme and validity of the present formulation. The paper finds that the method can be conveniently applied for dynamic analysis. It takes lesser computational time and can also be used in conjunction with the boundary element method.
References
J S Gui et al. Appl. Mech. Mater.353–356 (2013)
H Y Zhang et al Sci. Technol. Min. Metall.23 685 (2016)
C R Dowding Int. J. Rock Mech. Min. Sci. Geomech. Abstr.15 83 (1978)
P Pineda et al Adv. Mater. Res.133 (2010)
C K Seal et al Int. J. Mod. Phys. B24 2478 (2010)
S L Kramer Geotechnical Earthquake Engineering (New Jersey: Prentice Hall) (1996)
Ž Nikolić et al Earthq. Eng. Struct. Dyn.46 159 (2017)
L Jing and J A Hudson Int. J. Rock Mech. Min. Sci.39 409 (2002)
Z H Wang et al Appl. Mech. Mater.166 636–640 (2012)
P Li, EX Song Int. J. Numer. Anal. Methods Geomech.40 344 (2016)
J P Wolf Earthq. Eng. Struct. Dyn.26 931 (1997)
P Li and E X Song Soil Dyn. Earthq. Eng.48 48 (2013)
M Saleh Asheghabadi and M A Rahgozar Iran. J. Sci. Technol. Trans. Civ. Eng. 1–15 (2018). https://doi.org/10.1007/s40996-018-0214-0
B Engquist and A Majda Math. Comput.31 629 (1977)
Lysmer and R L Kuhlemeyer J. Eng. Mech. Div. ASCE95 859 (1969)
M Saleh Asheghabadi and H Matinmanesh Proc. Eng.14 3162 (2011)
H Matin Manesh and M Saleh Asheghabadi The Twelfth East Asia-Pacific Conference on Structural Engineering and Construction (2011)
L Zdravkovic and S Kontoe The 12th International Conference of International Association for Computer Methods and Advances in Geomechanics (IACMAG) (2008)
L Kellezi Soil Dyn. Earthq. Eng.19 533547 (2000)
Kontoe S PhD thesis (Imperial College, University of London) (2006)
J Bielak, K Loukakis, H Yoshiaki and C Yoshimura Bull. Seismol. Soc. Am.93 817 (2003)
L-Y Fu and R-S Wu Geophysics65 596 (2000)
L-Y Fu and Y G Mu Acta Geophys. Sin.37 521 (1994)
L-Y Fu 66th Ann. Internat. Mtg. Soc. Expl. GeophysI 1239 (1996). https://doi.org/10.1190/1.1826323
L-Y Fu, Y G Mu and H J Yang Geophysics62 650 (1997)
J Wang 18th International Conference on Structural Mechanics in Reactor Technology (SMiRT 18) Beijing (2005)
D Givoli, J B Keller Comput. Methods Appl. Mech. Eng.76 41 (1989)
P Bettess Int. J. Numer. Method Eng.11 54–64 (1978)
O C Zienkiewicz, K Bando, P Bettess, C Emson, T C Chiam Int. J. Numer. Method Eng.21 1229 (1985)
I Kaljevis, S Saigal, A Ashraf Int. J. Numer. Method Eng.35 2079 (1992)
H N Andreas Eng. Comput. Mech.167 3–12 (2013)
Y Kagawa, T Yamabuchi and S Kitagami Boundary Element Methods in Engineering (Berlin: Springer) 1017 (1983)
I Kaljević I et al Int. J. Numer. Method Eng.35 2079 (1992)
ABAQUS User Manual, Viewed on 15 Jan 2019. http://abaqus.software.polimi.it/v6.13/books/usb/default.htm?startat=pt06ch28s03alm03.html
G Goch and M Reigl J. Appl. Phys.79 9084 (1996)
M Saleh Asheghabadi, M Sahafnia, A Bahadori, N Bakhshayeshi Int. J. Environ. Sci. Technol.16(7) 2961–2972 (2019)
Author information
Authors and Affiliations
Contributions
Mohsen Saleh Asheghabadi coordinated and supervised the progress of the research. He performed the numerical analysis using ABAQUS and presented the results and analysis. Zulfiqar Ali worked on the literature review and infinite element boundary formulations and prepared the manuscript.
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Saleh Asheghabadi, M., Ali, Z. Infinite element boundary conditions for dynamic models under seismic loading. Indian J Phys 94, 907–917 (2020). https://doi.org/10.1007/s12648-019-01533-4
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12648-019-01533-4