
Abstract
In this paper, an analysis of the spread of random extraneous low-frequency (50 Hz) vibrations excited in a gravimeter body is presented. Further, their influence on the gravimeter scale reference system is determined by applying the theory of covariance function. The data on the measurement of strength of random extraneous vibrations in fixed points excited in the gravimeter body were recorded on the time scale in the form of arrays using a three-axis accelerometer. High-frequency (2 and 20 kHz) noise vibrations were also used to modulate the gravimeter scale data. While processing the results of measuring the strength of random extraneous vibrations and the data arrays on the reference system, estimates of autocovariance and cross-covariance functions by changing the quantisation interval on the time scale were calculated. Software developed within the MATLAB 7 package was applied for the calculations.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
When carrying out precise gravimetric measurements, the results are considerably influenced by vibrations predominating at the point of measurement that may be of both natural (caused by wind) and artificial origins (excited by vehicles or factories). Modern gravimeters, such as the Scintrex CG-5 used in this study, use filters for eliminating extraneous vibrations. In this study, the influence of extraneous vibrations on the gravimeter reference scale is investigated by applying the theory of covariance functions. For measuring the parameters of extraneous vibrations, the vibration measuring bench from Brüel and Kjær (Denmark) was used. Figure 1 shows the test bench for investigating the dynamic properties of the gravimeter, the data collection, and processing equipment (3660D) with a DELL computer (positions 1 and 2 in Fig. 1), the three-axis accelerometer (4506), and the gravimeter under investigation (positions 3 and 4 in Fig. 1).

Gravimeter reference system investigation bench
During the experimental investigation, the data on the gravimeter’s reference system were measured at different excitations of extraneous vibrations: zero excitation, harmonic vibrations up to 50 Hz, and sweep vibrations up to 50 Hz. In the research, the acceleration of extraneous vibrations in the Z-direction (vertical) is analysed.
Further, the influence of extraneous vibrations that affect the performance of the gravimeter on the gravimeter scale reference system (upon applying the theory of covariance functions) was determined.
The data on the influence of extraneous vibrations on the arrays of the gravimeter scale reference system were obtained using the experimental bench with the three-axis accelerometer, as shown in Fig. 1. The spectrum of experimental bench measurement data is shown in Figs. 2 and 3.

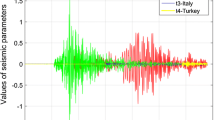
Time signal of experimental bench measurement data at operating gravimeter (blue curve) and zero extraneous excitation (red curve) (colour figure online)

Frequency spectrum of experimental bench measurement data at operating gravimeter (blue curve) and zero extraneous excitation (red curve) (colour figure online)
At two points on the body of the gravimeter (situated in its lower and upper parts), extraneous vibration signal excitation vectors were obtained by the accelerometer under four experimental conditions (1 to 4), and high-frequency noise vibrations were used in condition 5. These five conditions were as follows:
-
1.
At zero extraneous excitation on the vibration bench,
-
2.
At zero extraneous excitation on the floor,
-
3.
At harmonic excitation up to 50 Hz on the vibration bench,
-
4.
At sweep excitation up to 50 Hz on the vibration bench.
-
5.
Modulating the gravimeter vibrations using high-frequency noise vibrations (2 and 20 kHz)
2 Simulation of parameters of the gravimeter’s vibrations
In the paper, we provide details of a calculation method for the most reliable value of the vibration vector’s trend by applying the least-squares method. Here, we assume the vibration vector trend is discrete with a constant value. Moreover, the application of the least-squares method partially eliminates random errors of the vibrations. For processing large volumes of measurement data, the least-squares method provides asymptotically effective values of the calculated parameters, particularly when the distribution of the measurement data is not normal.
The array of measurement data of low-frequency vibration acceleration consists of four vectors \( \varphi \) (columns). Each vector is understood to be a random function having random measurement errors. Upon applying the least-squares method to each vector \( \varphi \), we calculate the most reliable value \( \tilde{\varphi } \) of the vibration vector trend, which is referred to as the weighted average. We apply an assumption that variations in the value of the vector trend are harmonic when the predicted wavelength conforms to the vector length of the vibrations’ acceleration. The parametric equation of a single value \( \varphi_{i} \) of the vector is expressed as follows:
where \( \varepsilon_{i} \) is a random error of acceleration, \( \varphi_{i} \) is the value of acceleration, and \( \tilde{\varphi } \) is the trend of the acceleration vector. Coefficient \( a_{i} \) is expressed as follows:
where \( \Delta_{i} = \Delta \cdot i,\;\Delta = 2\pi /n \) is the value of the measurement unit and i = 1, 2, …n. We express Eq. (1) using matrices as follows:
where \( \varepsilon \) is the vector of random errors, \( \varphi = \left( {\varphi_{1} , \varphi_{2} , \ldots ,\varphi_{n} } \right)^{T} \) is the vibration acceleration vector, and \( A = \left( {a_{1} , a_{2} , \ldots ,a_{n} } \right)^{T} \) is the matrix of coefficients of parametric equations (n × 1).
We calculate the most reliable value of the vibration acceleration vector \( \varphi \) upon applying the condition of the least-squares method as follows:
where P is the diagonal matrix (n × n) of weights pi of accelerations \( \varphi_{i} \). The weights of single accelerations \( \varphi_{i} \) are calculated according to the following equation:
where \( \sigma_{0} \) is the standard deviation of the measurement result \( \varphi_{0} \), where the weight is considered to be equal to \( p_{0} = 1 \). Thus, the value of \( \sigma_{0} \) is chosen freely, because it does not influence the calculation results. The measurement result \( \varphi_{0} \) is chosen such that it ensures the values of weights \( p_{i} \) are close to one (for reducing the calculation volume).
Hence, we write an equation
and then obtain
Equation (6) shows that the value of \( \sigma_{{\varphi_{i} }} \) depends on the value of the vibration acceleration \( \varphi_{i} \). Therefore, an acceleration of higher value is of less accuracy, because \( \varphi_{i} \gg \sigma_{{u_{i} }} \).
Upon applying Eq. (5), we can write
Here, the accepted average value \( \frac{{\sigma_{0}^{2} }}{{\sigma_{{u_{i} }}^{2} }} = 10^{17} \).
The extremum of Eq. (4) is found by establishing its partial derivatives with respect to parameter \( \tilde{\varphi } \), upon its equating to zero and solving the obtained equation:
Then, we obtain
and
The solution will be as follows:
where \( N = \left( {A^{T} PA} \right) \) and \( \omega = A^{T} P\varphi \).
The accuracy of the parameter estimates calculated upon applying the least-squares method is evaluated by their covariance matrix \( K_{{\tilde{\varphi }}} \). In the case of the present task, where the trend is a scalar, we can write this as follows:
where \( \sigma_{0}^{\prime } \) is the estimate of the standard deviation \( \sigma_{0} \). This is evaluated according to the following equation:
The quality of data on all four acceleration vectors was evaluated by taking into account the indicator of their accuracy (the standard deviation). The estimates of standard deviations are provided in Tables 1 and 2.
According to the gravimeter sensor data, the estimates σφ of the standard deviation of the parameters are the lowest for the second vector (measurement on the floor in the case of extraneous zero excitation). The estimates σφ of the standard deviation of the parameters of other vectors are considerably higher. Moreover, the values of accuracy indicators of parameters of relevant vectors (established upon applying the arithmetic mean or the weighted average in the processing procedure) are similar.
3 The covariance model of parameters of the gravimeter vibration signals
For a theoretical model, an assumption is applied that errors in measuring the gravimeter digital vibration signals are random and possibly systematic. In each vector of the vibration measurement data array, the trend of the measurement data of that vector is eliminated. Further, the time interval of the spread of vibrations is used as one of the parameters. The theoretical model is based on the concept of a stationary random function, by considering that errors in measuring the parameters of gravitation vibrations are random and of the same accuracy.
We will consider the random function (formed according to the arrays of measuring the vibration parameter \( \varphi \)) a stationary function (in a broad sense), meaning its average value \( M\left\{ {\varphi \left( t \right)} \right\} \to {\text{const}}, \) and the covariance function depend only on the difference of arguments \( \tau - K_{\varphi } \left( \tau \right) \). For processing the digital signals, discrete Fourier transform [1,2,3] and the theory of wavelet functions [4,5,6,7] may be applied. The autocovariance function of a single data array, or the cross-covariance function of two data arrays \( K_{\varphi } \left( \tau \right) \), will be expressed as follows [8,9,10,11,12,13,14,15,16]:
or
where \( \varepsilon \varphi_{1} = \varphi_{1} - \tilde{\varphi }_{1} \), \( \varepsilon \varphi_{2} = \varphi_{2} - \tilde{\varphi }_{2} \) are the cantered vectors of measurement of vibration parameters \( \varphi \) (when the trend is eliminated), u is the vibration parameter, \( \tau = k \cdot \Delta \) is the variable quantisation interval, k is the number of units of measurement, \( \Delta \) is the number of units of measurement, \( \Delta \) is the value of a unit of measurement, T is time, and M is the mean.
The estimate \( K^{\prime}_{\varphi } \left( \tau \right) \) of the covariance function, according to the available data on the measurement of vibration parameters, is calculated as follows:
where \( n \) is the total number of discrete intervals.
Equation (14) can be applied either in the form of an autocovariance function or a cross-covariance function. When it is an autocovariance function, the arrays \( \varepsilon \varphi_{1} \left( u \right) \) and \( \varepsilon \varphi_{2} \left( {u + \tau } \right) \) are parts of single arrays, and when it is a cross-covariance function they are two different arrays.
The estimate of a normed covariance function is as follows:
where \( \sigma_{\varphi }^{\prime } \) is the estimate of the standard deviation of a random function.
For eliminating the trends of vectors in the ith digital array of measurements, the following equations are applied:
where \( \varepsilon \varphi_{i} \) is the ith digital array of reduced values where a trend of vectors \( \varphi_{i} \) is eliminated, \( \varphi_{i} \) is the ith array of the measured vibration parameters, e is a unit vector of size (n × 1), n is the number of lines in the ith array, \( \tilde{\varphi }_{i} \) is the weighted average vector of the vectors in the ith array, and \( \varphi_{ij} \) is the jth vector of the reduced values in the ith array (where j = 1,…,m).
For elimination of the trend of vectors, the arithmetic mean or the weighted average is applied. The vector of the arithmetic mean of vectors of the ith array is calculated according to the following equation:
The weighted average of vectors is calculated by applying the least-square method.
The estimate of the covariance matrix of vibration parameters in the ith array is expressed as follows:
The estimate of the covariance matrix or two vibration parameters vectors i and j is expressed as follows:
Here, the sizes of the \( \varphi_{i} ,\varphi_{j} \) arrays should be the same.
The accuracy of the calculated correlation coefficient is defined by the standard deviation \( \sigma_{r} \). The value of this is established according to the following equation:
where \( k \to 450, \) and r is correlation coefficient. The maximum estimate of the standard deviation is obtained when the value of r is close to zero, and in this case, \( \sigma^{\prime}_{r} \approx 0,05, \) when \( r \approx 0,5, \) we find \( \sigma^{\prime}_{r} \approx 0,037. \)
4 Results and discussion
The gravimeter scale reference system was fixed at 6 Hz frequency intervals and at n = 450, a vector of each condition was obtained. The expression of each measurement vector is a random function when approximating its expression to the one of a stationary function, and the components of the constant and periodic trends are eliminated.
The measurement data arrays were processed by the software developed within the MATLAB 7 package of programs.
The values of the quantisation interval of normed covariance functions vary from 1 to n/2. For each vector of the gravimeter scale reference system, the estimate \( K'_{\varphi } \left( \tau \right) \) of the normed autocovariance function \( K_{\varphi } \left( \tau \right) \) was calculated, and five graphical expressions of normed autocovariance functions were obtained.
In addition, the estimates \( K'_{\varphi } \left( \tau \right) \) of the normed cross-covariance functions for the five conditions and nine graphical expressions of their relevant combinations were obtained.
The normed autocovariance functions calculated for the five conditions achieve the maximum value of the correlation coefficient \( r \to 1,0 \) when the values of the quantisation interval \( k \to 0 \left( {\tau_{k} \to 0} \right) \) and then, the value of the correlation coefficient further falls down to \( r \to 0 \) when \( k \to \left( {5:20} \right)\left( {\tau_{k} \to 0,8 s:3,4 s} \right). \) In conditions 3 and 4, the values of autocovariance functions at extraneous excitation of vibrations (harmonic and sweep vibrations with the frequency up to 50 Hz) in the body of the gravimeter and increasing quantisation interval varied across a broad range \( r \to \left( { \pm \;0,5: \pm \;0,8} \right). \) This demonstrates that the random functions of the gravimeter scale data for conditions 3 and 4 are not stationary because of the influence of extraneous vibration signals.
The impact of high-frequency noise vibrations (2 kHz and 20 kHz) on gravimeter signals is practically invisible. Moreover, the values and expressions of the gravimeter autocovariance functions are unchanged.
The normed cross-covariance functions for the five conditions have low values of correlation coefficient that vary in the range \( r \to \left( { \pm \;0,04: \pm \;0,25} \right). \) These data prove that extraneous vibration signals only slightly affect the cross-correlation of vectors for the five conditions. However, the influence of extraneous vibration signals is expressed in the results for conditions with normed autocovariance functions. This is shown in Figs. 4 to 17 below.

Normed autocovariance function of a vector of the gravimeter scale reference system for condition 1

Normed autocovariance function of a vector of the gravimeter scale reference system for condition 2

Normed autocovariance function of a vector of the gravimeter scale reference system for condition 3

Normed autocovariance function of a vector of the gravimeter scale reference system for condition 4







Normed autocovariance function of a vector of the gravimeter scale reference system for condition 5

Normed cross-covariance function of vectors of the gravimeter scale reference system for condition 5 and the 2 kHz noise vectors

Normed cross-covariance function of vectors of the gravimeter scale reference system for condition 5 and the 20 kHz noise vectors

Graphical expression of the generalised (spatial) correlation matrix of the array of four vectors of the gravimeter scale reference system
In Fig. 17, the graphical expressions of the generalised (spatial) correlation matrix of the array of four vectors of the gravimeter scale reference system are provided. The expressions of the correlation matrices turn into blocks of four pyramids, where the values of correlation coefficients are shown by tints of the colour spectrum. The chromatic projection of the pyramids is shown in the horizontal plane.
5 Conclusions
An analysis of the influence of the extraneous vibrations on the gravimeter scale reference system by applying the theory of covariance functions enables establishing the dynamics of changes in correlation between the data vectors, depending on the parameters of the excited vibrations. The probabilistic dependence (autocovariance) of these vectors is strong (\( r \to 1,0) \), but only at a small quantisation interval [when \( k \to 0 \left( {\tau_{k} \to 0 s} \right) \)]. At zero excitation, the probabilistic dependence rapidly falls to \( r \to 0 \) at \( k \to 5\left( {\tau_{k} \to 0,8 s} \right) \). However, in the presence of extraneous vibration excitation (harmonic and sweep vibrations with frequencies up to 50 Hz), the rates of decrease in autocovariance to \( r \to 0 \) at \( k \to 20\left( {\tau_{k} \to 3,4 s} \right) \) are slower. Further, in the presence of extraneous vibration excitation, on increasing the quantisation interval, the values r of autocovariance functions vary across a broad range when \( r \to \left( { \pm \;0,5: \pm \;0,8} \right). \) This demonstrates that the random functions of the data of the gravimeter scale reference system in the case of extraneous excitation are not stationary. The values of the cross-covariance functions of the vectors obtained in the presence of extraneous excitation and zero excitation vary across a narrow range when \( r \to \left( { \pm \;0,04: \pm \;0,25} \right). \) These data show that low-frequency (50 Hz) extraneous vibrations have little effect on the cross-correlation of the vectors. However, the influence of extraneous excitation vibrations is noticeable on the normed autocovariance functions of vectors of the gravimeter scale reference system.
High-frequency (2 kHz and 20 kHz) noise modulation vibrations does not affect the autocovariance functions practically. Further, the influence of high-frequency modulation vibrations does not significantly affect the gravimeter system readings vectors for the normalised inter-covariance functions, because their values are practically close to zero. Therefore, high-frequency noise does not distort gravitational oscillations.
References
N Cardoulas, A C Bird and A I Lawan Photogramm. Eng. Remote Sens. 62(10) 1173 (1996)
M Ekstrom, A McEwen Photogramm. Eng. Remote Sens. 56(4) 453 (1990)
I A Muhammad, U S Muhammad, A Ishfaq Signal, Image Video Process. 12(2) 379 (2018)
G Horgan Photogramm and Remote Sens. 64(12) 1171 (1998)
B Hunt, T W Ryan, F A Gifford Photogramm. Eng. Remote Sens. 59(7) 1161 (1993)
J P Antoine Rev. Cienc. Mat. (La Habana) 18 113 (2000)
D E Dutkay, P E T Jorgensen Rev. Mat. Iberoam. 22 131 (2004)
K R Koch Einführung in die Byes-Statistik. (Berlin: Springer), p 224 (2000)
J Skeivalas Theory and Practice of GPS Networks. (Vilnius: Technika), p 287 (2008)
A Kilikevičius, M Jurevičius, J Skeivalas, K Kilikevičienė, V Turla Signal Image Video Process. 10 1287 (2016)
A Sahnoune, D Berkani Signal Image Video Process. 12(7) 1273 (2018)
S O Chen, M M Balasooriya Signal Image Video Process. 12(2) 363 (2018)
A Kilikevičius, J Skeivalas, M Jurevičius, V Turla, K Kilikevičienė, J Bureika, A Jakstas Indian J. Phys. 91 1077 (2017)
J Skeivalas, V Turla, M Jurevicius, G Viselga Indian J. Phys. 92 417 (2018)
B Rubina, J Anupriya, K Suneel Indian J. Phys. 89 (10) 1077 (2015)
S Davood, A Tahajjodi Indian J. Phys. 91(11) 1447 (2017)
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Skeivalas, J., Obuchovski, R. & Kilikevičius, A. The analysis of gravimeter performance by applying the theory of covariance functions. Indian J Phys 93, 1377–1384 (2019). https://doi.org/10.1007/s12648-019-01398-7
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12648-019-01398-7