
Abstract
Modern free-space optical communication systems primarily use intensity modulation with direct detection. The effectiveness of free-space optical communications can be hindered by atmospheric turbulence. Variations in the refractive index occur throughout the transmission channel as a result of inhomogeneities in the atmosphere’s temperature and pressure. In this work, three types of atmospheric turbulence (rain, fog, and dust) were studied and analyzed, where the laser beam was traced through the beam profile, and thus a deterioration in intensity due to turbulence was described. This work had important aspects that mainly focused on finding a new design for an optical FSO communication system with laser beam tracking during deflection in atmospheric turbulence, making it work well with strong turbulence at visible and non-visible wavelengths depending on the set of position sensors. The displacement amount was calculated by calculating the last deviation amount of the laser beam in the tracking circuit program by applying a mathematical model to the programming used during atmospheric turbulence and thus knowing the deviation amount as an angle. This work has important aspects that are mainly focused on finding a new design for an optical FSO communication system with laser beam tracking during deflection in atmospheric turbulence, making it work well with strong turbulence at visible and non-visible wavelengths depending on the set of position sensors used. Among the most important results obtained, we conclude that dense fog has a significant effect on changing the path of the laser.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
Lasers have many applications, and one of these applications can be used in communications, including secret communications. Therefore, the properties of the laser must be preserved while working in this field [1,2,3,4,5,6]. The capacity of FSO communication technology to provide transmissions at incredibly high data rates has drawn a lot of interest lately. Two endpoints that are hundreds of kilometers apart are involved [7, 8]. FSO communication is now a competitive option to radio frequency (RF) technologies, thanks to recent developments in the field. Both a transmitting and receiving terminal make up an FSO system. Similar to an RF system, information is modulated onto electromagnetic waves and sent to the receiving system. Usually operating in the visible or infrared spectrum, FSO links function at frequencies that are much higher than those of RF lines. Broader bandwidths generated by faster frequencies result in larger data rates [9]. During installation, the transmitter and receiver should be correctly aligned. It will be able to send data in clear weather conditions. However, if the weather changes, such as due to rain, fog and, dust, the refractive index changes, causing the light intensity to fade, a phenomenon known as scintillation. Transmission loss, also known as loss due to attenuation, is a decline in the intensity of a light beam caused by the spread of the beam over a long distance in a transmission medium [10]. Turbulence in clear air can significantly affect the transmitted optical beam. Both solar heat and wind can contribute to uniform air pressure and temperature. Air cells change in size and refractive index due to the irregular variations in the atmosphere’s refractive index caused by these fluctuations. Phase and amplitude fluctuations in the received signal can be randomly caused by variations in the optical beam’s transmission path and the air’s refractive index.
Methodology
The concentrated light beam is transferred via an optical transmitter. As the link distance increases, the transmitted beam’s range gets wider. The larger beam causes signal loss, a decrease in the signal-to-noise ratio, and an increase in the bit error rate by lowering the connection margin at the receiving end. A larger receiver aperture diameter on the receiving side is necessary to receive all the information provided by the optical carrier; however, this increases noise from ambient light. The following formula provides the geometrical losses for FSO links: [10]
Here dt represents diameter of the transmitter in (mm), dr is the diameter of receiver (in mm), θ is divergence angle of beam in (mrad) and L is the length of the communication link in (m).” Because all internal design factors stay constant, geometrical losses are regarded as constant losses. Geometric loss and atmospheric attenuation contribute to the overall attenuation. In Eq., the total attenuation is given: [10,11,12]
Different attenuation issues that cause power loss cause the link’s quality to degrade. The link margin needs to be used more precisely to offset the power loss. The link margin (Pl) is defined as the ratio of the receiving power (Pr) and receiver threshold or sensitivity (S), which is often stated in dB [13].
For active recovery at the receiver side, the average power of the signal must be more than the receiver sensitivity. The manufacture will often state the sensitivity, which ranges from 20 to 40 dBm. The receiver’s power is represented as: [13]
Arx is the receiver aperture area, θ is the divergence angle, α is atmospheric attenuation, and l is the distance between the transmitter and receiver. Pr and Pt indicate the power at the receiver and transmitter, respectively. The atmospheric attenuation coefficient is an important factor that influences the overall performance of the system. Equation (4) shows that the power at the receiver is inversely proportional to the connection range and divergence angle but directly proportional to the transmit power and receiver aperture area. The equation’s exponential component, which deals with air attenuation, has a significant impact on connection quality [14]. The atmospheric loss is stated as follows in dB: [15]
Ta: The atmospheric transmittance is the ratio of power received to power transmitted into the optical link. When a narrow beam is used, acquisition, tracking, and pointing (ATP) techniques are typically implemented in fixed and mobile FSO communication systems. Some of the reasons to use such beams include their concentrated light intensity, high data rate, and long range. Wide beam utilization, however, might make the execution needs of the employed ATP process less stringent, or it might yield to do away with the process altogether. Depending on use cases, employed methods, and operating principles, ATP processes in FSO communication systems can be divided into different categories.
Experimental setup
Due to the long investigation process, outside FSO communication is challenging. Thus, the outside limitations have been replicated in a controlled environment. The atmospheric conditions can be replicated in a controlled setting so that various measurements can be made in the same conditions. In optical turbulence generating (OTG) chamber was developed and designed to provide a controlled atmosphere primarily on erratic atmospheric channels like (rain, fog, & dust) placed between an arranged 1–5 m of open space between two points. The experimental setup for the FSO communication system’s compensation technique is depicted in Fig. 1 and is based on a directly modulated laser source with a 632 nm wavelength and a 5 mw output.

Experimental setup for the compensation technique of the FSO communication system
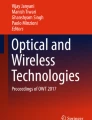
On the transmitter side, a laser driver circuit an electronic circuit that transmits a continuous laser beam in addition to having a greater signal speed generates the electrical signal. The optical signal was sent through an optical turbulence-generating (OTG) chamber, which measures 100 × 50 × 50 cm. There were three different types of atmospheric turbulence: fog, rain, and dust. In the event of a deviation, the laser beam is returned to the primary receiver by programming the machine’s motor after the signal from the side sensors is received. The primary receiver was a set of sensors on the automated fast steering mirror, which were utilized to receive the light signal. Figure 2 illustrates a laser beam over the rain; (A) Front view (B) Side view.

Laser beam transmissions over rain; (a) front view (b) side view
In the case of fog generation inside the OTG, as in Fig. (3a, 4b, and 4c) where each figure indicates the amount of fog generated during the experiment, the effect of fog on the deflection of the laser beam was greater than the effect of rain in the above case. Figure 4 (a) front view (b) side view shows the transmission of the laser beam during dust generation, where the deviation results indicated a convergence of results between the effect of fog and dust in some average readings.

Laser beam transmissions over; (a) weak fog (b) moderate fog (c) strong fog

Laser beam transmissions over dust (a) front view (b) side view
Results and discussion
To calculate the voltage value in volt (v) for each sensor is done through the following relationship:
Where, PSR.: Position Sensor Reading in Program, 5v: Base Voltage of Controller Circuit, 210: Arduino ADC Resolution = 1024. By measuring the motor displacement per cycle with digital Vernier scale tool, the displacement was set at 4 mm per cycle. To calculate the displacement value in millimeter (mm) for laser beam at atmospheric turbulence is done through the following relationship:
Where, LDA: \(\text{L}\text{a}\text{s}\text{t} \text{D}\text{e}\text{v}\text{i}\text{a}\text{t}\text{i}\text{o}\text{n} \text{A}\text{m}\text{o}\text{u}\text{n}t\),\({36}^{^\circ }\): Integer Steps in Degree,\({360}^{^\circ }\): The Rotation Angle of the Complete Step, 4 mm: The amount of displacement in (mm) for a full revolution
The following relationship can be used to determine the angle of deviation of the laser beam in degrees and radian:
Where, x: displacement in mm, y: distance between transmitter and receiver = 1000 mm.
The result of rain attenuation as shown in Fig. 5 and Table 1. Where, V1 is voltage of first position sensor, V reference is voltage of the original receiver, and V2 is voltage of second position sensor. The result of Fog attenuation at weak fog as shown in Fig. 6; Table 2. While the moderate fog as shown in Fig. 7; Table 3. Finally at strong fog shown in Fig. 8; Table 4. The results of dust attenuation shown in Fig. 9; Table 5. According to the relationship above, the displacement values for rain, weak fog, moderate fog, thick fog, and dust, respectively, will be 7.2, 10.4, 12.8, 15.6, and 11.2 mm. In the case of rain, weak fog, moderate fog, dense fog, and dust respectively, the laser beam deviation value is 0.08ο, 0.12ο, 0.15 ο, 0.18 ο, and 0.13 ο,which is equivalent to 1.4, 2.1, 3.1,2.6 and 2.2 mrad when the line-of-sight angle is 90 degrees, the values of these angles are the value of the difference between the angle 90 degrees and the angles calculated from the relationships above. The displacement amount was calculated by calculating the last deviation amount of the laser beam in the tracking circuit program by applying a mathematical model to the programming used during atmosphere turbulence and thus knowing the deviation amount as an angle. This work has important aspects that mainly focused on, finding a new design for an optical FSO communication system with laser beam tracking during deflection in atmospheric turbulence, making it work well with strong turbulence at visible and non-visible wave lengths.
Recently, recent studies have been conducted on this topic, including “Relative Analysis of OCDMA-FSO and FSO Under Normal, Haze and Fog Conditions” [16], “Correction to: Investigations on challenges faced by hybrid FSO/RF high‑speed networks” [17], “Secrecy capacity of hybrid FSO-RF communication links” [18], these studies opened new horizons in the world of communications, and addressed many of the problems facing the communications issue.

The signal sensors in the rain turbulence condition

The signal sensors in the weak fog turbulence condition

The signal sensors in the moderate fog turbulence condition

The signal sensors in the strong fog turbulence condition

The signal sensors in the dust turbulence condition
Conclusions
From the results obtained, we conclude that dense fog has a significant impact on changing the laser path, so the deviation value of the laser beam is the highest value in this case. This change in the laser path due to atmospheric turbulence can be addressed by the new design of the FSO optical communication system.
Data availability
Data sharing is not applicable to this article as no datasets were created or analyzed during the current study.
References
R.K. Jamal, D.A. Kafi, Secure communications by chaotic carrier signal using Lorenz model. Iraqi J. Phys. 14(30), 51–63 (2016)
D.A. Kafi, R.K. Jamal, K.A. Al-, Naimee, Lorenz model and chaos masking/addition technique. Iraqi J. Phys. 14(31), 51–60 (2016)
R.K. Jamal, D.A. Kafi, Secure communication coupled semiconductor laser based on Rössler chaotic circuits. IOP Conf. Ser. Mater. Scie Eng. 571, 012119 (2019)
R.K. Jamal, D.A. Kafi, Secure communication coupled laser based on chaotic Rössler circuits. Nonlinear Opt. Quantum Opt. 51, 79–91 (2019)
N.M. Ali, R.K. Jamal, A novel secure communication system using Chen’s chaotic model. Opt. Quant. Electron. 54, 64 (2022)
E.A. Abed, S.K. Mousa, K. Raied, Jamal, A novel secure communication system using optoelectronic feedback in semiconductor laser. J. Opt., (2023)
V. Vaishali, S. Sancheti, Investigation between performances of Free Space Optical Communication Links under Atmospheric Turbulence. J. Commun. 13(7), 368–376 (2018)
Y. Kaymak, R. Rojas-Cessa, J. Feng ,Nirwan, Z. Ansari, T. Zhang, A Survey on Acquisition, Tracking, and Pointing Mechanisms for Mobile Free-Space Optical Communications, IEEE Communications Surveys & Tutorials, 20(2), 1104–1123 (2018)
National Aeronautics and Space Administration (NASA). 9.0 Communications, 232–252, (2021)
S.R. Swaminathan, Recent trend and effect of free space optical communication: overview and analysis. Int. J. Res. Circuits Devices Syst. 3(1), 80–84 (2022)
A.S. Alatawi, A.A. Youssef, M. Abaza, M.A. Uddin, A. Mansour, Effects of Atmospheric Turbulence on Optical Wireless Communication in NEOM Smart City. Photonics, 9(4),(2022)
M.T. Mushtaq, S.M. Yasir, M.S. Khan, A. Wahid, M.S. Iqbal, Analysis of Internal Design parameters to minimize geometrical losses in free-space Optical Communication Link. Acta Phys. Pol. Ser. A. 134(1), 275–277 (2018)
M.M. Hassan, G.M. Rather, Free Space Optics (FSO): A Promising Solution to First and Last Mile Connectivity (FLMC) in the Communication Networks, I. J. Wireless and Microwave Technologies, 4, 1–15 (2020)
L. Rinaldi, Mitigation of Atmospheric Turbulence Effects on Optical Links by Integrated Optics (HAL open science, 2022)
F. Nadeem, H. Khalil, F. Qamar, M. Ali, F.S.O. Communication, Benefits, challenges and its analysis in DWDM Communication System. Sir Syed Univ. Res. J. Eng. Technol. 9(02), (2020)
B. Himali Sarangal, M. Singh, V.G. Singh, & Satveer Kour, relative analysis of OCDMA-FSO and FSO under Normal, Haze and Fog conditions. Adv. Comput. Communication Paradigms, 535, (2023)
G. Shakshi, Himanshi Saini, correction to: investigations on challenges faced by hybrid FSO/RF high–speed networks. J. Opt. 52, 935–936 (2023)
Hemant Kumar Sharma, & Brijesh Kumbhani, Secrecy capacity of hybrid FSO-RF communication links. J. Opt., (2024)
Funding
The authors have not disclosed any funding.
Author information
Authors and Affiliations
Contributions
Each co-author has made unique contributions to the work. The author EKA prepared the setup of FSO system, EHA she contributed to writing the article draft and wrote the program for FSO system and contributed to the analysis of the results. As the author AJM, She supervised the work and reviewed the article draft.
Corresponding author
Ethics declarations
Ethical approval
The authors would like to declare that they do not have any conflict of interests.
Competing interests
The authors have not disclosed any competing interests.
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Electronic supplementary material
Below is the link to the electronic supplementary material.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Al - Gazzi, E.K., Ali, E.H. & Mohammed, A.J. Development And Execution Of An FSO Communication System To Track The Scattered Laser Beam During Atmospheric Turbulence. J Opt (2024). https://doi.org/10.1007/s12596-024-01761-w
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s12596-024-01761-w