
Abstract
In this paper, an SIS epidemic model with age of vaccination is investigated. Asymptotic smoothness of the semi-flow is proved. By analyzing the corresponding characteristic equations, the local stability of a disease-free steady state and an endemic steady state is discussed. It is shown that if the basic reproduction number is greater than unity, the system is permanent. By constructing two Lyapunov functionals, it is proved that the endemic steady state is globally asymptotically stable if the basic reproduction number is greater than unity, and sufficient conditions are derived for the global asymptotic stability of the disease-free steady state. Numerical simulations are given to illustrate the asymptotic stabilities of the disease-free steady state and endemic state.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
Vaccination is a commonly used method for controlling disease, such as measles, polio, diphtheria, tetanus, pertussis, tuberculosis, etc. Mathematical models including vaccination may contribute to design effective vaccination policies for combating the spread of these diseases in a population [1]. The study of vaccination, treatment and associated behavioral changes related to disease transmission has been the subject of intense theoretical analysis. There has been a large body of work on the plausible effects of vaccination programs in the literature (see, for example [1,2,3,4,5,6] ).
There is great variability in the structure of vaccination models, depending on the disease and type of vaccine. One aspect of disease and vaccine that is very influential in the public health impact of vaccines is the duration of immunity. Some vaccines confer permanent immunity against infection such that the vaccinated individuals cannot be infected, while others seem to provide temporary protection (see, for example, vaccines for pertussis [4] and varicella [5]). Once a vaccine wanes from the body of the vaccinated person, the person becomes susceptible to the disease again. Li and Ma [6] established an epidemic model with vaccination strategies in which the vaccine was available for both the newborns and susceptible individuals, and the immunity of the vaccinated individuals was temporary. They considered the following model:
where S(t), v(t) and I(t) denote the numbers of the susceptible, vaccinated and infectious individuals at time t, respectively. The parameters \(p, q, A, \beta , \gamma , \eta , \mu \) and \(\mu _1\) are positive constants. A is the birth rate of newborns, \(\mu \) is the per capita natural death rate, \(\mu _1\) is the per capita natural and disease-induced death rate, \(\beta \) is the transmission rate coefficient of the disease, \(\gamma \) is the recovery rate coefficient of the infected individuals. \(q (0<q<1)\) denotes the fraction of the vaccinated newborns, and \(1-q\) denotes that of the unvaccinated newborns. The susceptible population is vaccinated at a constant rate p, and the vaccine wears off at a constant rate \(\eta .\)
Note that system (1.1) was formulated as a system of ODEs under the assumption that all individuals within a class behave identically, regardless of how much time they have spent in their class. However, the early infectivity experiments [7] reported in Francis together with the measurements of HIV antigen and antibody titers have supported the possibility of an early infectivity peak (a few weeks after exposure) and a late infectivity plateau (one year or so before the onset of “full-blown” AIDS) [8]. Therefore, it is necessary to incorporate the duration age into modeling. Since Hoppensteadt established an age-dependent epidemic model in [9], the effects of the age factor on the epidemic models have been extensively considered (see, for example [10,11,12,13]).
In this paper, motivated by the works of Li and Ma [6] and Li et al. [11], we introduce an SIS model with age of vaccination, where the vaccine loses its protective properties with time and eventually vaccinated individuals become susceptible again (For example, the present HBV vaccine, its immune protection cannot last long and provides no immunity to some people). The model that we considered takes the form
with boundary condition
for \(t\geqslant 0\) and initial condition
Here, \(S_0, I_0\in \mathbb {R}^+\) and \(v_0(a)\in L_+^1(0, \infty ),\) where \(L_+^1(0, \infty )\) is the space of functions on \([0, \infty )\) that are nonnegative and Lebesgue integrable. a is the vaccine-age which means the time individuals spend in the vaccinated class, v(a, t) is the density of vaccinated individuals with respect to the age of vaccination a at time t and it is assumed that the newly vaccinated individuals enter the vaccinated class v(a, t) with vaccine-age equal to zero. The vaccine waning rate is \(\eta (a)\) which is a bounded general function of vaccine-age a. Thus, the number of individuals moving from the vaccinated class into the susceptible class at time t is \(\int _0^\infty \eta (a)v(a, t)da.\)
In the following, we list some assumptions on the key function \(\eta (a),\) which is supposed to be biologically significant and allow the mathematical treatment of (1.2).
Assumption 1.1
For problem (1.2)–(1.4), we assume that
-
(i)
\(\eta (a)\in L_+^1(0, \infty ),\) with respective essential upper bounds \(\overline{\eta }\in (0, \infty );\)
-
(ii)
\(\eta (a)\) is Lipschitz continuous on \(\mathbb {R}^+\) with coefficient \(M_\eta ;\)
-
(iii)
There exists \(\mu _0\in (0, \mu ]\) such that \(\eta (a)\geqslant \mu _0\) for \(a\geqslant 0.\)
Define the space of functions for problem (1.2)–(1.4) as
with norm
Then the initial condition (1.4) is taken to be included in \(\mathcal {X},\) i.e.
By the standard theory of functional differential equations [14], it can be proved that system (1.2) with initial condition (1.5) has a unique nonnegative solution. Therefore, we can obtain a continuous semi-flow \(\Phi : R^+\times \mathcal {X}\rightarrow \mathcal {X}\) for system (1.2), which is
with
The organization of this paper is as follows. “Asymptotic Smoothness” is devoted to proving the asymptotic smoothness of the semi-flow generated by system (1.2). “Steady states and local stability”, by analyzing the corresponding characteristic equations, we study the local asymptotic stability of a disease-free steady state and an endemic steady state. In “Uniform persistence”, we show that the system is uniformly persistent if the basic reproduction number is greater than unity. In “Global stability of steady states”, we discuss the global stability of the two steady states by constructing suitable Lyapunov functionals and using LaSalle’s invariance principle, respectively. “Numerical simulation and discussion” is devoted to some simulations and discussion on the model.
Asymptotic Smoothness
In this section we study the asymptotic smoothness of the semi-flow generated by system (1.2), which is necessary to obtain the global properties of the system.
Firstly we give the definition of asymptotic smoothness.
Definition 2.1
([15]). A semi-flow \(\Phi (t, x_0): R^+\times \mathcal {X}\rightarrow \mathcal {X}\) is said to be asymptotically smooth, if, for any nonempty, closed bounded set \(B\subset \mathcal {X}\) for which \(\Phi (t, B)\subset B,\) there is a compact set \(B_0\subset B\) such that \(B_0\) attracts B.
To verify the asymptotic smoothness of the semi-flow of system (1.2), we need the following result.
Lemma 2.1
([15]). If the following two conditions hold, then the semi-flow \(\Phi (t, x_0)=\phi (t, x_0)+\varphi (t, x_0): R^+\times \mathcal {X}\rightarrow \mathcal {X}\) is asymptotically smooth in \(\mathcal {X}.\)
-
(i)
There exists a continuous function \(u: R^+\times R^+\rightarrow R^+\) such that \(u(t, h)\rightarrow 0\) as \(t\rightarrow \infty \) and \(\Vert \phi (t, x_0)\Vert _\mathcal {X}\leqslant u(t, h)\) if \(\Vert x_0\Vert _\mathcal {X}\leqslant h;\)
-
(ii)
For \(t\geqslant 0, \varphi (t, x_0)\) is completely continuous.
In our application, we divide the semi-flow \(\Phi \) into the following two operators \(\phi (t, x_0), \varphi (t, x_0): R^+\times \mathcal {X}\rightarrow \mathcal {X},\)
in which
Then, for \(t\geqslant 0,\) we have \(\Phi (t, x_0)=\phi (t, x_0)+\varphi (t, x_0).\) In use of Volterra formulation (Webb [16] and Iannelli [17]), integrating the term v(a, t) of system (1.2) along the characteristic line \(t-a=const.\) gives that
where \( \rho (a)=\exp \left( -\int _0^a\varepsilon (s)ds\right) , \varepsilon (a)=\mu +\eta (a).\) Thus, by the definition of (2.1), we have that
In the following, we will prove that condition (i) of Lemma 2.1 holds true.
Lemma 2.2
For \(h>0,\) let \(u(t, h)=he^{-(\mu +\mu _0)t}.\) Then \(\lim _{t\rightarrow \infty }u(t, h)=0\) and \(\Vert \phi (t, x_0)\Vert _\mathcal {X}\leqslant u(t, h)\) if \(\Vert x_0\Vert _\mathcal {X}\leqslant h.\)
Proof
Clearly, \(\lim _{t\rightarrow \infty }u(t, h)=0.\) For \(x_0\in \mathcal {X}, \Vert x_0\Vert _\mathcal {X}\leqslant h,\) we have that
The proof is complete. \(\square \)
Define the state space for system (1.2) as follows:
in which
Lemma 2.3
For system (1.2), we have that
-
(i)
\(\Omega \) is positive invariant for \(\Phi : \Phi _t(x_0)\in \Omega \) for \(\forall t\geqslant 0, x_0\in \Omega ;\)
-
(ii)
\(\Phi \) is point dissipative and \(\Omega \) attracts all points in \(\mathcal {X}.\)
Proof
For \(t\geqslant 0, x_0\in \Omega ,\) by Eq. (1.6), we have that
Considering Eq. (2.2), we get that
Note that
and hence we have that
Combining (2.5) and (2.6) gives that
It follows from the variation of constants formula that for \(t\geqslant 0,\)
which implies \(\Vert \Phi _t(x_0)\Vert \in \Omega .\) Hence, \(\Omega \) is positively invariant for \(\Phi \). In addition, since \(\limsup _{t\rightarrow \infty }\Vert \Phi _t(x_0)\Vert _\mathcal {X}\leqslant A/\bar{\mu }\) for \(\forall x_0\in \mathcal {X},\) \(\Phi \) is point dissipative and \(\Omega \) attracts all points in \(\mathcal {X}.\) The proof is complete. \(\square \)
The following result is immediate from Assumption 1.1 and Lemma 2.3.
Lemma 2.4
If \(x_0\in \mathcal {X}\) and \(\Vert x_0\Vert _\mathcal {X}\leqslant M\) for some \(M\geqslant A/\bar{\mu },\) then for all \(t\geqslant 0\) the following statements hold:
-
(i)
\(0\leqslant S(t), I(t), \int _0^\infty v(a, t)da\leqslant M;\)
-
(ii)
\(v(0, t)\leqslant pM.\)
To satisfy the condition (ii) of Lemma 2.1, we need to prove that for any closed and bounded set \(B\subset \mathcal {X}, \varphi (t, B)\) is compact. In light of Lemma 2.4, S(t) and I(t) remain in the compact set \([0, A/\bar{\mu }]\subset [0, M],\) where \(M\geqslant A/\bar{\mu }\) is a bound for B. Thus, it is only to show that \(\tilde{z}(a, t)\) remains in a compact subset of \(L_+^1(0, \infty )\) independent of \(x_0\in \Omega .\) The following results give a criterion for compactness in \(L_+^1(0, \infty ).\)
Lemma 2.5
([18]). Let \(K\subset L^p(0, \infty )\) be closed and bounded where \(p\geqslant 1.\) Then K is compact if the following conditions hold true.
-
(i)
\(\lim _{h\rightarrow 0}\int _0^\infty |f(z+h)-f(z)|^pdz=0\) uniformly for \(f\in K;\)
-
(ii)
\(\lim _{h\rightarrow \infty }\int _h^\infty |f(z)|^pdz=0\) uniformly for \(f\in K.\)
Lemma 2.6
For \(t\geqslant 0, \varphi (t, x_0)\) is completely continuous.
Proof
Note that
It follows from (2.4) that
which implies that \(\lim _{h\rightarrow \infty }\int _h^\infty |\tilde{z}(a, t)|da=0.\)
In order to verify condition (i), for \(t\geqslant 0, h\in (0, t)\) sufficiently small, we have
Denote
Since \(0\leqslant \rho (a)\leqslant 1\) and \(\rho (a)\) is a non-increasing function respect to a, it follows that
Combining (2.7)–(2.9) we get that
From Lemma 2.4, we obtain that |dS / dt| is bounded by \(A+(\mu +p+\gamma +\bar{\eta })M+\beta M^2,\) which implies \(S(\cdot )\) is Lipschitz on \((0, \infty )\) with coefficient \(M_s,\) that is
Hence, it follows from (2.8) that
In conclusion, we have that
which converges to 0 as \(h\rightarrow 0\) and hence condition (i) is proved. Thus, \(\tilde{z}(a, t)\) remains in a compact subset \(B_{\tilde{z}}\) which leads to \(\varphi (t, B)\subseteq [0, M]\times B_{\tilde{z}}\times [0, M] ,\) which is compact in \(\mathcal {X}.\) Then \(\varphi (t, x_0)\) is completely continuous. The proof is complete. \(\square \)
Combining Lemmas 2.1, 2.2 and 2.6, we obtain the following result on asymptotic smoothness.
Theorem 2.1
The semi-flow \(\Phi (t, x_0)\) of system (1.2) is asymptotically smooth.
Steady States and Local Stability
In this section, we investigate the local stability of a disease-free steady state and an endemic steady state of system (1.2) by analyzing the corresponding characteristic equations, respectively.
System (1.2) always has a disease-free steady state \(E_0(S^0, v^0(a), 0 ),\) where
in which \(\theta =\int _0^\infty \eta (a)\rho (a)da.\) It is easy to see,
Define
\(\mathcal {R}_0\) is the average number of secondary transmissions of a single infectious individual in a fully susceptible population, which is called the basic reproduction number of system (1.2). It is easy to show that if \(\mathcal {R}_0>1,\) in addition to the disease-free steady state \(E_0,\) system (1.2) has a unique endemic steady state \(E^*(S^*, v^*(a), I^*), \) where
Now firstly we study the local stability of the disease-free steady state \(E_0.\) Change the variables as follows:
Linearizing system (1.2) at \(E_0\) gives the following system
Let
in which \(x_1^0, x_3^0\) are constants and \(x_2^0(a)\) is the function of a. Inserting (3.3) into (3.2), it follows that
If \(x_3^0\ne 0,\) it follows from the third equation of (3.4) that
Therefore, there is a real root \(\lambda <0\) if \(\mathcal {R}_0<1.\) Otherwise, \(\lambda >0\) while \(\mathcal {R}_0>1.\) If \(x_3^0=0,\) integrating the second equation of (3.4) from 0 to a yields that
Plugging (3.6) into the first equation of (3.4), we obtain the characteristic equation of system (1.2) at the steady state \(E_0\):
Denote
Clearly, \(\mathcal {K}(0)=\theta .\) Assume that \(Re\lambda \geqslant 0,\) then \(|\mathcal {K}(\lambda )|\leqslant \theta \leqslant 1.\) From Eq. (3.7), we obtain that
This is a contradiction. It means that all roots of (3.7) have negative real parts. Consequently, the disease-free steady state \(E_0\) is locally asymptotically stable if \(\mathcal {R}_0<1\) and unstable if \(\mathcal {R}_0>1.\)
In the following we investigate the local stability of endemic steady state \(E^*.\) Change variables into
Linearizing system (1.2) at \(E^*,\) we derive the following system
Set
where \(y_1^0, y_3^0\) are constants and \(y_2^0(a)\) is the function of a. Substituting (3.10) into (3.9), it follows that
Integrating the second equation of (3.11) from 0 to a gives that
Plugging (3.12) into the first equation of (3.11), we deserve that
where \(\mathcal {K}(\lambda )\) is defined as (3.8). Combining the third equation of (3.11) and (3.13), we obtain the characteristic equation of system (1.2) at \(E^*\) as follows:
Assume that \(Re\lambda \geqslant 0\). Equation (3.14) can be changed into
which implies
This is a contradiction. It means all the roots of (3.14) have negative real parts. Therefore, the endemic steady state \(E^*\) of system (1.2) is locally asymptotically stable if \(\mathcal {R}_0>1.\)
In conclusion, we have the following result.
Theorem 3.1
If \(\mathcal {R}_0<1,\) the disease-free steady state \(E_0(S^0, v^0(a), 0)\) of system (1.2) is locally asymptotically stable; if \(\mathcal {R}_0>1,\) \(E_0\) is unstable and the endemic steady state \(E^*(S^*, v^*(a), I^*)\) exists and is locally asymptotically stable.
Uniform Persistence
In this section, we study the uniform persistence of system (1.2).
Define
According to [19], we have the following result.
Lemma 4.1
The subsets \(\mathcal {Y}\) and \(\partial \mathcal {Y}\) are both positively invariant under the semi-flow \(\{\Phi (t)\}_{t\geqslant 0},\) namely, \(\Phi (t, \mathcal {Y})\subset \mathcal {Y}\) and \(\Phi (t, \partial \mathcal {Y})\subset \partial \mathcal {Y}\) for \(t\geqslant 0.\)
Furthermore, the following lemma is required for the derivation of a persistence result.
Lemma 4.2
The disease-free steady state \(E_0\) is globally asymptotically stable for the semi-flow \(\{\Phi (t)\}_{t\geqslant 0}\) restricted to \(\partial \mathcal {Y}.\)
Proof
Let \((S_0, v_0(\cdot ), I_0)\in \partial \mathcal {Y}\). Then \(I_0\in \partial \tilde{\mathcal {Y}}\) and it follows that
Since \(S(t)\leqslant A/\bar{\mu }\) as \(t\rightarrow \infty ,\) we have \(I(t)\leqslant \hat{I}(t)\) where
It is easy to show that system (4.1) has a unique solution \(\hat{I}(t)=0,\) which indicates \(I(t)\rightarrow 0\) as \(t\rightarrow \infty .\)
Considering the following system
\(\tilde{E}_0(S^0, v^0(a))\) is an unique steady state. From (2.2), we have that
Note that
which implies
Thus, given \(\forall \varepsilon >0\), there exists \(T>0\) such that for \(t>T,\)
which yields
Since this holds for \(\varepsilon >0\) sufficiently small, letting \(\varepsilon \rightarrow 0,\) we derive that
On the other hand, it follows from (4.2) that
which yields
This, together with (4.3), follows that
For \(a\geqslant 0,\) it follows from (2.2) that
Therefore, the disease-free steady state \(E_0\) is globally asymptotically stable in \(\partial \mathcal {Y}.\) The proof is complete. \(\square \)
By applying Theorem 3.7 in [20], we are now in a position to give the following theorem about the uniform persistence.
Theorem 4.1
Suppose that \(\mathcal {R}_0>1.\) The semi-flow \(\{\Phi (t)\}_{t\geqslant 0}\) is uniformly persistent with respect to \((\mathcal {Y}, \partial \mathcal {Y}),\) that is, there exists a constant \(\varepsilon >0\) such that for \(x\in \mathcal {Y}, \lim _{t\rightarrow \infty }\Vert \Phi (t, x)\Vert _\mathcal {X}\geqslant \varepsilon .\) Furthermore, there exists a compact global attractor \(\mathcal {A}\) of bounded set in \(\mathcal {Y}.\)
Proof
It follows from Lemma 4.2 that \(E_0\) is globally asymptotically stable in \(\partial \mathcal {Y}.\) Thus, it suffices to prove that
in which
Assume that there exists \(y\in \mathcal {Y}\) such that \(\lim _{t\rightarrow \infty }\Phi (t, y)=E_0.\) So we can find a sequence \(\{y_n\}\subset \mathcal {Y}\) such that
where
Choose \(n>0\) large enough such that \(S^0-1/n>0\) and the following inequality holds
For this chosen \(n>0,\) there exists \(T>0\) such that for \(t>T,\) it follows
Inserting (4.5) into the second equation of (1.2) and by using of comparison principle, we get that
where \(\check{I}(t)\) is the solution of the following system
It is easy to know from (4.6) that
From (4.4) and (4.7), it follows that \(\check{I}(t)\rightarrow \infty \) as \(t\rightarrow \infty \) which implies \(I_n(t)\) is unbounded. This is contradictory to (4.5). Thus, \(W^S(E_0)\cap \mathcal {Y}=\Phi \) holds. By [20], \(\{\Phi (t)\}_{t\geqslant 0}\) is uniformly persistent. Furthermore, we can conclude that there exists a compact set \(\mathcal {A}\subset \mathcal {Y}\) which is a global attractor for \(\{\Phi (t)\}_{t\geqslant 0}\) in \(\mathcal {Y}.\) The proof is complete. \(\square \)
Global Stability of Steady States
In this section, we are concerned with the global stability of each of feasible steady states of system (1.2). The technique of the proofs is to use suitable Lyapunov functionals and LaSalle’s invariance principle.
For convenience, let
It is easy to show that \(g(x)\ge 0, g'(x)=1-1/x\) for all \(x\in (0,+\infty )\) and \(\min _{0<x<+\infty }g(x)=g(1)=0.\)
Define
clearly, if \(a\geqslant 0, \omega (a)>0\) and \(\omega (0)=\theta .\) It follows that
We first state and prove our result on the global stability of the disease-free steady state \(E_0(S^0, v^0(a), 0).\)
Theorem 5.1
If \(\mathcal {R}_0\leqslant 1\) and \(A\beta +p\theta \gamma >(\mu +p)\gamma ,\) the disease-free steady state \(E_0(S^0, v^0(a), 0)\) of problem (1.2)–(1.4) is globally asymptotically stable.
Proof
Let (S(t), v(a, t), I(t)) be any positive solution of system (1.2) with boundary condition (1.3) and initial condition (1.4).
Define
where
Calculating the derivative of \(L_1(t)\) along the solution of problem (1.2)–(1.4), and on substituting \(A=\mu S^0+p S^0-pS^0\theta ,\) it follows that
Denoting \(\partial v/\partial a=v_a,\) the derivative of \(L_2(t)\) along the solution of system (1.2) is as follows:
Since
inserting (5.4) into (5.3), we derive that
Combining (5.2) and (5.5), it follows that
Hence, \(\mathcal {R}_0\leqslant 1\) and \(A\beta +p\theta \gamma >(\mu +p)\gamma \) ensure \(L'(t)\leqslant 0\) for all \(S, v, I\geqslant 0.\) Let \(\mathcal {M}\) be the largest invariant subset of the set \(\sum =\{(S(t), v(a, t), I(t))|L'(t)=0\}.\) We now claim that \(\mathcal {M}=\{E_0\}.\) In fact, if \(\mathcal {R}_0<1,\) it follows from (5.6) that \(\sum =\{(S(t), v(a, t), I(t))|S(t)=S^0, v(a, t)=v^0(a), I(t)=0\},\) which implies \(\mathcal {M}=\{E_0\}.\) When \(\mathcal {R}_0=0, \sum =\{(S(t), v(a, t), I(t))|S(t)=S^0, v(a, t)=v^0(a)\}\) and \(I(t)=0\) from the first equation of (1.2). Again, there is \(\mathcal {M}=\{E_0\}.\) Noting that if \(\mathcal {R}_0\leqslant 1,\) \(E_0(S^0, v^0(a), 0 )\) is locally asymptotically stable. We see that it is globally stable. The proof is complete. \(\square \)
We are now in a position to establish the global stability of the endemic steady state \(E^*\) of system (1.2).
Theorem 5.2
If \(\mathcal {R}_0>1,\) the endemic steady state \(E^*(S^*, v^*(a), I^*)\) of problem (1.2)–(1.4) is globally asymptotically stable.
Proof
Let (S(t), v(a, t), I(t)) be any positive solution of problem (1.2)–(1.4). Define
where
in which \(\omega (a)\) is defined as (5.1) and \(k_1>0\) is a constant to be determined later.
Calculating the derivative of \(U_1(t)\) along the positive solution of system (1.2), it follows that
Choose \(k_1>0\) satisfying
We derive from (5.7) and (5.8) that
Similar to (5.4) and (5.5), we have that
Consequently, we obtain from (5.9) and (5.10) that
Hence, if \(\mathcal {R}_0>1, U'(t)\leqslant 0\) for all \(S, v, I\geqslant 0.\) It is readily seen from (5.11) that \(U'(t)=0\) if and only if \(S(t)=S^*, v(a, t)=v^*(a).\) Furthermore, from the first equation of (1.2) it follows that \(I(t)=I^*.\) Noting that if \(\mathcal {R}_0>1,\) the endemic steady state \(E^*\) is locally stable, we see that it is globally asymptotically stable by using LaSalle’s invariance principle. The proof is complete. \(\square \)
Numerical Simulation and Discussion
In this paper, we have proposed an SIS epidemic model with age of vaccination. In order to reflect the dependence of immune protection on the duration since individuals are vaccinated, we assume that the vaccinated population is structured by the vaccine-age, and the vaccine waning rate depends on the vaccine-age. We have calculated the basic reproduction number \(\mathcal {R}_0\) to show that if \(\mathcal {R}_0>1,\) the disease can invade into the susceptible individuals and the unique endemic steady state is globally asymptotically stable, whereas if \(\mathcal {R}_0\leqslant 1,\) sufficient conditions are obtained for the global stabilities of the disease-free steady state. In the following, to verify the theoretical results obtained, we perform some numerical simulations on the model (1.2)–(1.4).
Discretize the derivative in a with a forward difference and the derivative in t with a backward difference, and the integral with a right-endpoint rule sum. Since both age and time progress simultaneously, we discretize the age and time with same step \(\Delta t=0.02.\) The numerical method is given by the following difference scheme:
where \(n=0,\ldots ,N-1, k=0,\ldots ,K-1, N=10000, K=5000.\) It can be shown that the solutions of the difference scheme (6.1) converge to the solution of the continuous problem (1.2).
In model (6.1), we let \(A=3, \mu =0.06, \mu _1=0.1, \gamma =0.2,\) and
The initial values are
Example 1
We choose \(\beta =0.01, p=0.1\) in system (1.2). By (3.1), we get \(\mathcal {R}_0=0.7628. \) There is a disease-free steady state \(E_0(S^0, v^0(a), 0),\) where \(S^0=30, v^0(a)=pS^0\rho (a).\) Furthermore, \(A\beta +p\theta \gamma =0.0344, (\mu +p)\gamma =0.0320,\) then the sufficient condition \(A\beta +p\theta \gamma >(\mu +p)\gamma \) holds. By Theorem 4.1, \(E_0\) is globally stable. It is easy to compute that the total number of vaccinated population V(t) converges to \(V^0=\int _0^av^0(a)da=28.8973.\) Fig. 1 shows that the steady state \(E_0\) is globally asymptotically stable which is consistent with Theorem 4.1.
Note that in Figs. 1c, 2c and 3c, there is a “shock” in the solution at \(t=a\), which follows from the boundary condition. Since in model (6.1), \(v_k^n (k\ge n)\) can be calculated from initial condition \(v_k^0\) and the second equation only, while the calculation of \(v_k^n (k<n)\) still needs the boundary condition (1.3) and the first equation. Therefore, a “shock” is caused in the solution of \(v_k^n\) at \(t=a.\)

\(\mathcal {R}_0=0.7628<1, A\beta +p\theta \gamma >(\mu +p)\gamma .\) The disease-free steady state \(E_0(S^0, v^0(a), 0)\) is globally stable, and the susceptible and vaccinated population converge to \(S^0=30, v^0(a)=pS^0\rho (a),\) respectively. The total number of vaccinated population V(t) converges to \(V^0=28.8973\)
Example 2
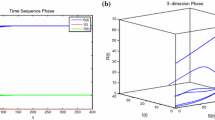
In system (1.2), choose parameters \(\beta =0.015, p=0.1\). Then we get the reproduction number \(\mathcal {R}_0=1.0753. \) In addition to the disease-free steady state, there is an unique endemic steady state \(E^*(S^*, v^*(a), I^*),\) where \(S^*=20, v^*(a)=pS^*\rho (a), I^*=2.4098\). The total number of vaccinated population V(t) converges to \(V^*=\int _0^av^*(a)da=25.9315.\) By Theorem 5.2, the endemic steady state \(E^*\) is globally asymptotically stable which is indicated in Fig. 2.

\(\mathcal {R}_0=1.0753>1.\) The endemic steady state \(E^*(S^*, v^*(a), I^*)\) is globally stable, and the susceptible and vaccinated population converge to \(S^*=20, v^*(a)=pS^*\rho (a), I^*=2.4098,\) respectively. The total number of vaccinated population V(t) converges to \(V^*=25.9315\)
In any epidemiological model, the sensitivity of the results to the parameters’ values are very important in planning the control strategies. In order to see how the waning rate \(\eta (a)\) affect the spread and control of the disease, we give the following example.
Example 3
In system (1.2), let \(\beta =0.015, p=0.1\). The waning rate \(\eta (a)\) changes to the following
Then we have \(\mathcal {R}_0=1.0523, S^*=20, v^*(a)=pS^*\rho (a), I^*=1.6741, V^*=\int _0^av^*(a)da=27.1543\). Figure 3 shows that the endemic steady state \(E^*\) is globally asymptotically stable.

\(\mathcal {R}_0=1.0523>1.\) The endemic steady state \(E^*(S^*, v^*(a), I^*)\) is globally stable, and the susceptible and vaccinated population converge to \(S^*=20, v^*(a)=pS^*\rho (a), I^*=1.6741,\) respectively. The total number of vaccinated population V(t) converges to \(V^*=27.1543\)
Comparing Figs. 2 and 3, the value of \(I^*\) decreases from 2.4098 to 1.6741 along with the value of \(\eta (a)\) decreasing from 0.04 to 0.03. This indicates that the small value of waning rate \(\eta (a)\) benefits the disease control which can be achieved by re-vaccination. Hence, for the practical prevention purpose, our analysis suggests that reducing the waning rate by re-vaccination will be effective to control the disease.
References
Elbasha, E., Dasbach, E., Insinga, R.: Model for assessing human papillomavirus vaccination strategies. Emerg. Infect. Dis. 13, 28–41 (2007)
Xu, R.: Global stability of a delayed epidemic model with latent period and vaccination strategy. Appl. Math. Model. 36, 5293–5300 (2012)
Cai, L.M., Li, X.Z.: Analysis of a SEIV epidemic model with a nonlinear incidence rate. Appl. Math. Model. 33, 2919–2926 (2009)
Wendelboe, A.M., Van Rie, A., Salmaso, S., Englund, J.A.: Duration of immunity against pertussis after natural infection or vaccination. Pediatr. Infect. Dis. J. 24(5 Suppl.), 58–61 (2005)
Chaves, S.S., Gargiullo, P., Zhang, J.X., Civen, R., Guris, D., Mascola, L., Seward, J.F.: Loss of vaccine-induced immunity to varicella over time. N. Engl. J. Med. 356(11), 1121–1129 (2007)
Li, J., Ma, Z.: Global analysis of SIS epidemic models with variable total population size. Math. Comput. Modell. 39, 1231–1242 (2004)
Francis, D.P., Feorino, P.M., Broderson, J.R., Mccluer, H.M., Getchell, J.P., Mcgrath, C.R., Swenson, B., Mcdugal, J.S., Palmer, E.L., Harrison, A.K., et al.: Infection of chimpanzees with lymphadenopathy-associated virus. Lancet 2, 1276–1277 (1984)
Lange, J.M., Paul, D.A., Huisman, H.G., de Wolf, F., van den Berg, H., et al.: Persistent HIV antigenaemia and decline of HIV core antibodies associated with transition to AIDS. Br. Med. J. 293, 1459–1462 (1986)
Hoppensteadt, F.: An age-dependent epidemic model. J. Franklin Inst. 297, 325–338 (1974)
Iannelli, M., Martcheva, M., Li, X.Z.: Strain replacement in an epidemic model with super-infection and perfect vaccination. Math. Biosci. 195, 23–46 (2005)
Li, X.Z., Wang, J., Ghosh, M.: Stability and bifurcation of an SIVS epidemic model with treatment and age of vaccination. Appl. Math. Model. 34, 437–450 (2010)
Liu, L., Wang, J., Liu, X.: Global stability of an SEIR epidemic model with age-dependent latency and relapse. Nonlinear Anal. Real World Appl. 24, 18–35 (2015)
Wang, J., Zhang, R., Kuniya, T.: The stablity analysis of an SVEIR model with continuous age-structure in the exposed and infectious classes. J. Biol. Dyn. 9(1), 73–101 (2015)
Hale, J.K.: Functional Differential Equations. Springer, Berlin (1971)
Hale, J.K., Waltman, P.: Persistence in infinite-dimensional systems. SIAM J. Math. Anal. 20(2), 388–395 (1989)
Webb, G.F.: Theory of Nonlinear Age-dependent Population Dynamics. Marcel Dekker, New York (1985)
Iannelli, M.: Mathematical Theory of Age-Structured Population Dynamics. Giardini Editori e Stampatori, Pisa (1994)
Adams, R.A., Fournier, J.J.: Sobolev Spaces. Academic Press, New York (2003)
Magal, P.: Compact attractors for time periodic age-structured population models. Electron. J. Differ. Equ. 65, 1–35 (2001)
Magal, P., Zhao, X.-Q.: Global attractors and steady states for uniformly persistent dynamical systems. SIAM J. Math. Anal. 37(1), 251–275 (2005)
Acknowledgements
This work was supported by the National Natural Science Foundation of China (No. 11371368), the Natural Science Foundation of Hebei Province (Nos. A2014506015, A2016506002), the Science Foundation of Shijiazhuang Mechanical Engineering College (Nos. YJJXM 13008, JCYJ14011)
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Zhang, S., Xu, R. Global Stability of an SIS Epidemic Model with Age of Vaccination. Differ Equ Dyn Syst 30, 1–22 (2022). https://doi.org/10.1007/s12591-018-0408-8
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12591-018-0408-8