
Abstract
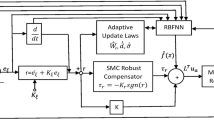
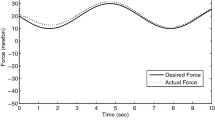
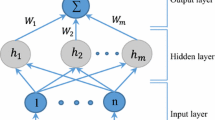
In this paper, we aim to improve the tracking performance of the manipulator joint system by establishing accurate friction model based on the Stribeck model and the cubic polynomial method. Meanwhile, in view of the established system model, an adaptive Radial Basis Function Neural Network (RBFNN) compensation computed-torque controller is designed for the manipulator joint system. Firstly, we consider the friction modeling process at low- and high- velocity regions to advance the model accuracy, and identify the parameters in the friction model equation offline via the particle swarm optimization (PSO) algorithm. Secondly, an adaptive RBFNN algorithm is developed to analyze the unmodeled dynamics online and introduce it to the computed-torque controller design. After that, we further conduct the stability analysis for the proposed controller based on the Lyapunov stability criterion. Finally, the self-developed manipulator joint platform introduction, the simulation experiment and the contradistinctive experiments are given to illustrate the effectiveness of designed controller.
Article PDF
Similar content being viewed by others
Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
References
J. B. Méndez, C. Perez-Vidal, J. V. Segura Heras, and J. J. Pérez-Hernéndez, “Robotic pick-and-place time optimization: Application to footwear production,” IEEE Access, vol. 8, pp. 209428–209440, 2020.
A. D. Smith, J. Chapin, P. V. Birinyi, P. V. Bhagvath, and A. F. Hall, “Automated polyaxial screw placement using a commercial-robot-based, image-guided spine surgery system,” IEEE Transactions on Medical Robotics and Bionics, vol. 3, no. 1, pp. 74–84, 2021.
D. Choi, S. H. Kim, W. Lee, S. Kang, and K. Kim, “Development and preclinical trials of a surgical robot system for endoscopic endonasal transsphenoidal surgery,” International Journal of Control, Automation, and Systems, vol. 19, pp. 1352–1362, 2021.
L. Baccelliere, N. Kashiri, L. Muratore, A. Laurenzi, M. Kamedula, A. Margan, S. Cordasco, J. Malzahn, and N. G. Tsagarakis, “Development of a human size and strength compliant bi-manual platform for realistic heavy manipulation tasks,” Proc. of IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 5594–5601, 2017.
A. Albu-Schffer, S. Haddadin, C. Ott, A. Stemmer, T. Wimboeck, and G. Hirzinger, “The DLR lightweight robotdesign and control concepts for robots in human environments,” Industrial Robot, vol. 34, no. 5, pp. 376–385, 2007.
H. Nakamura, K. Ohishi, Y. Yokokura, T. Miyazaki, and A. Tsukamoto, “Fine force control without force sensor based on reaction force estimation system considering static friction and kinetic friction,” Proc. of IECON 2016-42nd Annual Conference of the IEEE Industrial Electronics Society, pp. 5076–5081, 2016.
H. Iqbal and B. J. Yi, “Design and experimental verification of a 3-DOF spherical electromagnetic brake for haptic interface,” International Journal of Control, Automation, and Systems, vol. 18, pp. 1299–1309, 2020.
W. Wei, H. Dourra, and G. G. Zhu, “Adaptive transfer case clutch touchpoint estimation with a modified friction model,” IEEE/ASME Transactions on Mechatronics, vol. 25, no. 4, pp. 2000–2008, 2020.
K. Morito, J. Tsunoda, S. Sakaino, and T. Tsuji, “Reaction force observer using load dependent friction model,” Proc. of IEEE 15th International Workshop on Advanced Motion Control (AMC), pp. 423–428, 2018.
H. Feng, W. H. Qiao, C. B. Yin, H. F. Yu, and D. H. Cao, “Identification and compensation of non-linear friction for an electro-hydraulic system,” Mechanism and Machine Theory, vol. 141, pp. 1–13, 2019.
R. Kelly, J. Sandoval, and V. Santibáñez, “A GUAS joint position tracking controller of torque-driven robot manipulators influenced by dynamic Dahl friction: Theory and experiments,” IEEE Transactions on Control Systems Technology, vol. 29, no. 5, pp. 1877–1890, 2021.
X. Tan, G. P. Chen, and H. B. Shao, “Modeling and analysis of spatial flexible mechanical systems with a spherical clearance joint based on the LuGre friction model,” Journal of Computational and Nonlinear Dynamics, vol. 15, no. 1, p. 011005, 2020.
L. Wang, Y. Chang, and H. T. Zhu, “Internal model control and experimental study of ankle rehabilitation robot,” Robotica, vol. 38, no.5, pp. 940–956, 2020.
S. C. Zhen, Z. Y. Zhao, X. L. Liu, F. Chen, H. Zhao, and Y. H. Chen, “A novel practical robust control inheriting PID for SCARA robot,” IEEE Access, vol. 8, pp. 227409–227419, 2020.
X. Tan, G. P. Chen, D. Y. Sun, and Y. Chen, “Dynamic analysis of planar mechanical systems with clearance joint based on LuGre friction model,” Journal of Computational and Nonlinear Dynamics, vol. 13, no. 6, p. 061003, 2018.
M. N. Nevmerzhitskiy, B. S. Notkin, A. V. Vara, and K. V. Zmeu, “Friction model of industrial robot joint with temperature correction by example of KUKA KR10,” Journal of Robotics, vol. 2019, pp. 1–11, 2019.
H. Guo, B. Zhou, P. Yang, and X. Gu, “Application of modified Stribeck model and simulated annealing genetic algorithm in friction parameter identification,” Proc. of 12th International Conference on Intelligent Systems and Knowledge Engineering (ISKE), pp. 1–5, 2017.
C. Lin, H. Yau, and Y. Tian, “Identification and compensation of nonlinear friction characteristics and precision control for a linear motor stage,” IEEE/ASME Transactions on Mechatronics, vol. 18, no. 4, pp. 1385–1396, May 2013.
V. Sankardoss and P. Geethanjali, “PMDC motor parameter estimation using bio-inspired optimization algorithms,” IEEE Access, vol. 5, pp. 11244–11254, March 2017.
N. K. Chaturvedi and L. B. Prasad, “A comparison of computed torque control and sliding mode control for a three link robot manipulator,” Proc. of International Conference on Computing, Power and Communication Technologies (GUCON), pp. 1019–1024, 2018.
E. Rastogi and L. B. Prasad, “Comparative performance analysis of PD/PID computed torque control, filtered error approximation based control and NN control for a robot manipulator,” Proc. of IEEE UP Section Conference on Electrical Computer and Electronics (UPCON), pp. 1–6, 2015.
J. H. Li, J. Z. Wang, S. K. Wang, W. Qi, L. B. Zhang, Y. B. Hu, and H. Su, “Neural approximation-based model predictive tracking control of non-holonomic wheel-legged robots,” International Journal of Control, Automation, and Systems, vol. 19, pp. 372–381, 2021.
A. Nandi, B. Pradhan, N. B. Hui, D. S. Roy, and J. J. Rodrigues, “A novel hybrid neural network-based multirobot path planning with motion coordination,” IEEE Transactions on Vehicular Technology, vol. 69, no. 2, pp. 1319–1327, 2020.
H. Liu, Y. P. Pan, J. D. Cao, H. X. Wang, and Y. Zhou, “Adaptive neural network backstepping control of fractional-order nonlinear systems with actuator faults,” IEEE Transactions on Neural Networks and Learning Systems, vol. 31, no. 12, pp. 5166–5177, 2020.
J. Jiang, S. Cao, and Y. Dai, “Research on RBF neural network model compensation and adaptive control of robot manipulators,” Proc. of Chinese Control and Decision Conference (CCDC), IEEE, pp. 516–520, 2016.
M. M. Ferdaus, M. Pratama, S. G. Anavatti, M. A. Garratt, and Y. P. Pan, “Generic evolving self-organizing neurofuzzy control of bio-inspired unmanned aerial vehicles,” IEEE Transactions on Fuzzy Systems, vol. 28, no. 8, pp. 1542–1556, 2020.
Q. Jia, L. Wu, and H. Li, “Robust actuator fault reconstruction for Takagi-Sugeno fuzzy systems with time-varying delays via a synthesized learning and Luenberger observer,” International Journal of Control, Automation, and Systems, vol. 19, pp. 799–809, 2021.
K. Eltag and B. Y. Zhang, “Design robust self-tuning FPIDF controller for AVR system,” International Journal of Control, Automation, and Systems, vol. 19, pp. 910–920, 2021.
C. H. Wang, Y. Wan, and X. C. Liang, “Model establishment with Stribeck friction and fuzzy PID control for Cartesian picking robot system,” Proc. of Chinese Automation Congress (CAC), IEEE, pp. 3070–3074, 2017.
W. Sun, J. W. Lin, S. F. Su, N. Wang, and M. J. Er, “Reduced adaptive fuzzy decoupling control for lower limb exoskeleton,” IEEE Transactions on Cybernetics, vol. 51, no. 3, pp. 1099–1109, 2021.
W. Sun, S. F. Su, J. W. Xia, and Y. Q. Wu, “Adaptive tracking control of wheeled inverted pendulums with periodic disturbances,” IEEE Transactions on Cybernetics, vol. 50, no. 5, pp. 1867–1876, 2020.
Z. Anjum and Y. Guo, “Finite time fractional-order adaptive backstepping fault tolerant control of robotic manipulator,” International Journal of Control, Automation, and Systems, vol. 19, pp. 301–310, August 2021.
C. Zou, T. Tao, G. D. Jiang, X. S. Mei, and J. H. Wu, “A harmonic drive model considering geometry and internal interaction,” Proceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science, vol. 231, no. 4, pp. 728–743, 2017.
W. W. Shang, C. Shuang, and G. Yuan, “Adaptive computed torque control for a parallel manipulator with redundant,” Robotica, vol. 30, pp. 457–466, May 2012.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher’s Note Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
This work was supported by the National Key Research and Development Project of China (Grant No. 2018YFB2101004, 2018YFC0809204).
Xiaobin Shen received his M.S. degree in China Jiliang University in 2020. His research interests include design of modular robot joint and joint torque control.
Kun Zhou received his Ph.D. degree in the School of Electrical Engineering at Southwest Jiaotong University in 2018. He is currently a lecturer in the College of Mechanical and Electrical Engineering at China Jiliang University, China. His research interests include intelligent control algorithm, delayed neural networks, and fuzzy control and applications.
Rui Yu received her B.S. and M.S. degrees in China Jiliang University, in 2017 and 2020, respectively. She is currently pursuing a Ph.D. degree in control science and engineering, TongJi University. Her research interests include adaptive control, nonlinear system, and multi-agents control.
Binrui Wang received his Ph.D. degree in pattern recognition and intelligent system from the School of Information Science and Engineering at Northeastern University in 2005. Currently, he is a professor in the College of Mechanical and Electrical Engineering at China Jiliang University, PRC. His research interests include intelligent control algorithm and humanoid robot.
Rights and permissions
About this article

Cite this article
Shen, X., Zhou, K., Yu, R. et al. Design of Adaptive RBFNN and Computed-torque Control for Manipulator Joint Considering Friction Modeling. Int. J. Control Autom. Syst. 20, 2340–2352 (2022). https://doi.org/10.1007/s12555-021-0146-5
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12555-021-0146-5