
Abstract
This research seeks to identify the factors that affect people’s decision to purchase, or to not purchase, social robots for their homes. To this aim, we focus on a specific technological use case: behavior and habit change. As consumer behavior research suggests that preferred designs and price sensitivity will vary between those who are technology early adopters and those who are mainstream adopters, we look at how self-classification influences the aforementioned areas. To this end, we interview 18 individuals to identify behavioral change goals and note reactions to three videos of technology for habit change. In addition to assessing willingness-to-pay (WTP) by using established methods in market research, holistic product design cards are also created to aid this process and to support user design. Additionally, we compare how people’s purchase-based designs differ from their ideal designs. We find that although early adopters prefer domestic robots to be human-like in form and behavior, they exhibit significant downgrading, especially to a more device-like form, due to price. Alternatively, we find that those in the mainstream prefer technology that is not human-like in form or behavior, and that privacy concerns and a desire for control have significant impacts on their designs.
Similar content being viewed by others
Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Despite a growing understanding in the Human-Robot Interaction (HRI) community of the factors affecting liking and long-term use of home robots, we still have little knowledge of the factors that affect their purchase. This knowledge is important if robots are to move out of the lab and into the real world. Merging knowledge and methods from consumer research with those from UX and design offers a multi-disciplinary way of exploring how robots might become suitable for larger scale adoption. Although a number of factors are influential in a product’s market success, here we focus on design factors affecting purchasing (or in this case, intent to purchase). We choose to focus on design factors because, unlike social and economic factors external to the robot, robotics’ researchers and companies have some control over these during the development process.
When exploring potential purchasing behavior, it is critical to be aware of the fact that individuals’ decisions occur in a landscape where alternative products exists, competitors can implement software updates to satisfy their existing consumer base, and consumers might make choices to maintain the status quo (i.e., do nothing) for various reasons, despite liking a product. As well, price and affordability are major drivers of a design’s success (or failure), with consumers’ willingness-to-pay heavily influenced by technological orientation and how perceived benefits of the product compare to perceived costs of adoption (e.g., privacy invasion or reliance on technology). How these elements come into play for early adopters of technology may be different than for those who choose to adopt in the later stages of product diffusion.
For this study, we explore how designs created when researching what participants like in a home robot differ from designs created when attempting to maximize their purchasing intent. Due to differences between early adopters and the mainstream, we explore this question independently for both of these groups. To further aid this process, this paper introduces a new method, the use of Holistic Product Design Cards, which have utility when studying embodied and interactive agents as well as maximizing purchasing intent when designing technological systems. We use the test case of behavior and habit change due to research showing that robots improve motivation and help maintain change longer than two-dimensional technology (computers, virtual agents) [1,2,3]. Specifically, while [1] illustrated users’ increased desire for continued use of a health-related robot compared to a tablet (along with increases in positive affect and trust), Kiesler et al. [2] showed that people made healthier choices when a co-located robot was present versus non-co-located technology. Bainbridge et al. [3] also showed greater compliance to unusual requests based on higher physical presence. As well, research shows that robots for health and habit change receive more financial support than robots for many other use cases among crowdfunders [4].
Overall, our contributions to the fields of HRI and social robotics are in: (a) showing ideal domestic robot characteristics differ drastically by adopter type; (b) illustrating the importance of controlling for or reporting adopter category during HRI perception and adoption studies; (c), showing the importance of incorporating cost and competitive technology in design assessments for robots destined for broader consumer adoption, and (d) providing methods for the assessment of product-based design and suggestions for design reconciliation between adopter groups.
2 Background
2.1 Behavior and Habit Change
Behavior change is comprised of behavior change initiation and behavior change maintenance [5]. Different factors contribute to successful engagement in each of these two stages. For physical activity for example, home access to equipment is predictive of behavior change initiation but not change maintenance, while self-efficacy is associated with maintained changes but not initial adoption [6]. Additionally, behavior change initiation tends to occur at times when mental and physical resources are high and effort needed to engage in the behavior is low [7]. For these reasons, maintenance of new behavioral changes can often be difficult, with low rates of success [8].
In a systematic review of behavior change maintenance, five themes important to this process were identified. These were maintenance motives, self-regulation, psychological and physical resources, habits, and contextual factors, such as social support and environment [7]. Additionally, self-monitoring (e.g., consistently recording target behaviors and potentially other influencing variables such as stress and mood) has been shown to explain clinically significant differences in outcomes, even in comparison with other commonly used behavior change techniques, though the use of multiple techniques has been demonstrated to be most effective [9].
With regard to maintenance motives, deriving enjoyment from engaging in the behavior and being satisfied with one’s progress were found to be two main motives [7]. These are more effectively supported by reinforcement that is immediate and affective, as opposed to long-term and rational [7]. Self-regulation is the ability to control one’s behavior to be in line with desired goals and outcomes [10]. An ability to self-regulate not only varies across individuals, but also within each individual over time. When one’s resources (cognitive, physical, and/or emotional) are low, one’s ability to self-regulate is also lowered. This, in turn, may lead to lapses in the desired behavior.
Coping planning—planning out strategies to counteract anticipated barriers in advance of any lapses—can be an important facilitator of behavior change maintenance success [11]. Action planning—specifying exactly when, where, and how a behavior will be performed—can also be important in behavioral maintenance [11], as the combination of these cues is likely to make behaviors automatic over time [12]. These automatic behaviors, prompted by situational cues, are known as habits [13].
Habit formation can be ideal from the perspective of behavior change maintenance, as habits are performed even when psychological and physical resources and the ability to self-regulate are low [7]. This makes them the most sustainable mechanism for behavioral change [7]. Research on habits often reference the habit loop, the connection between a trigger (aka cue), behavior (aka routine, action), and reward (aka celebration, reinforcement) [14]. Because implementing new behaviors requires both motivation and ability, some researchers advocate that planned behaviors are “tiny", so as to make them easy to do and lower the self-regulation needed to do them [15].
2.2 Using Robots for Behavior Change
Multiple studies have shown that robots can effectively influence human behavior—including individuals’ choices to eat healthier, exercise more, and follow relaxation instructions—and found that robots are significantly more persuasive than virtual agents [1,2,3]. This advantage is likely due to their non-verbal cues [16] and their physical presence [17]. Specifically, Li [17] found that co-present robots are perceived more positively by users and are more persuasive than virtual characters or robots presented live on a screen; Chidambaram et al. [16] showed that people followed a robot’s suggestions more often when it used diverse body cues (e.g., gestures, proximity) than when it did not. Many of these studies have also found people experience higher levels of bonding, trust, and enjoyment when using a robot.
Robots are not only persuasive in the short-term; they also encourage behavior change over the longer term. In a 6-week study, adults tracked their exercise and calorie consumption for longer when using a robot, compared to using a computer or paper-based system [18]. In an 8-week study, social robots were found to be as effective as human clinicians in promoting snack reduction and weight loss [19]. Research has begun to explore the design of low-cost robots to support habit building for children [20, 21], but affordability considerations have been lacking when researching the design of such systems for adults.
2.3 Desired Form of Home Robots
To date, several studies have explored what form (e.g., human-like, machine-like) home robots should take, with conflicting results. In the US, Lee et al. [22] found an absence of preference. Though Sung et al. [23] concluded that there was an absence of preference for robots performing domestic tasks (e.g., cleaning, cooking), they noted that the look of home robots mattered for other tasks, in so much as they fit in with the general aesthetics of users’ homes, though they did not describe potential users’ preferences on the level of form. Ezer et al. [24], on the other hand, found an overall tendency for people in the US to prefer machine-like domestic robots, though younger adults imagined more human-like robots.
In addition to the study by Ezer et al. [25], research from Italy has also shown an influencing component of age. Older adults (65 and over) were found to prefer machine-like robots, those under 25 preferred human-like robots, and those in the middle were found to have less preference, more heterogeneous preference, and make choices in line with the prevailing “function over form” wisdom. This research also found that gender and education level did not influence preferences.
Research from other countries has come to disparate results, with some studies finding that home robots should be small and machine-like [26, 27], and others that they should be human-like [28,29,30]. Therefore, it seems likely that there is a cultural influence on preference, which was shown by [22]. As well, a number of these findings may also be attributable to differences in the ages of recruited participants, as discussed above. Research findings are likely to also differ based on the use of different inquiry methods in the data collection process, such as asking directly in a survey prompt, collecting participant drawings, or gathering feedback from videos. For example, research with adults (aged 22 to 44) in the UK gauged reactions to videos of several robots, finding that people exhibit an aversion to human-like home robots (i.e., Pepper), with participants commenting on the robots’ movement and facial expressions [31]. Therefore, methods showcasing more or less of the robot’s embodied interactions (such as movements or facial expressions) may prime different responses from participants.
Besides age, culture, and (potentially) method of presentation, it is unclear what other variables influence form preferences for home robots. To contribute to ongoing research in this area, our study examines preferences of people who are likely to be early adopters of technology compared to those who might use or purchase technology later in the adoption cycle. We also restrict our study to a defined task, as preferred form may also change along this dimension.
2.4 Designing Home Robots to Increase Consumer Purchasing
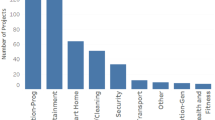
While there is growing research on home robots generally, research on how home robots might be designed, adapted, or analyzed from the perspective of consumer purchase and marketplace success is in its infancy. However, three studies have explored the design of domestic robots from a consumer-oriented lens. Jones discussed how home robots should be simplified for consumers, foregoing non-essential elements, in order to reduce both cost and technical complexity. His work also stressed that function is the most important aspect to consider when designing home robots [32]. However, this does not negate the importance of form as a driver of marketplace success. Kwak et al. [33] showed that photo advertisements of robots having different forms, but the same function, affected willingness to pay. Conducted in Korea, it was shown that machine-like forms were both preferred over human-like forms (e.g., Pepper, NAO) and that people reported having a higher purchase intention and willingness-to-pay for them, regardless of task. By contrast, Randall et al. [4] analyzed support on crowdfunding sites, and found that the early market was statistically more likely to financially back advertised home robot products when they were life-like (cartoon-like or animal-like) as opposed to machine-like. Pertaining to function, health and fitness, security and monitoring, and general education applications were more popular among these backers. Additionally, it was found that socially capable robots (those allowing two-way communication or with emotional expressiveness) increased backing two-fold and that single-function (as opposed to multi-function) products targeted for use by adults (as opposed to family use) were more likely to receive support among early adopters [4]. In light of recent failures (e.g., Jibo, Kuri) and given the paucity of non-toy-like social robots on the marketplace, it is important to gather more insights on designing consumer home robots, in an effort to contribute to how these might be more successfully deployed.
2.5 Early Adopters Versus the Mainstream Market
According to Diffusion of Innovations Theory, technology diffusion is comprised of five categories of adopters: innovators (2.5%), early adopters (13.5%), early majority (34%), late majority (34%), and laggards (16%) [34]. Each population is based on standard deviations from the mean time of adoption. Mathematical modeling of durable good innovations show that these percentages are reasonable approximations of actual diffusion rates of most durable consumer goods [35, 36].
In a 2017 review, early adopters’ characteristics were grouped into four categories: sociodemographic, personality, behavioral, and resources. Regarding sociodemographic factors: being younger, male, higher income, and having higher levels of education were associated with the early adoption of technology [37]. Other research has echoed this, and also found that early adopters tend to have a higher social class [38]. Though there is support for the association of these factors with early adoption, there is less overall consensus, and when present, these sociodemographic factors are not found to be as strongly correlated with early adoption as individual personality traits [37, 39]. Personality traits contributing to early adoption, as identified in Dedehayir et al.’s review, include technology orientation (e.g., technophilia), self-efficacy (belief one can use the technology), personal innovativeness, risk-taking and novelty seeking, and opinion leadership. Behavioral factors included greater technology use, and resources included having a larger social network, prior experience with similar technology, and higher levels of knowledge and technical skill [37].
The largest two adopter categories, the early and late majority, represent the mainstream market [40]. Recent work by Coskun et al. [41] has shown that the mainstream market have less trust in automated decision making than early adopters, preferring to exercise more control over their smart home technology. They also have a preference for product simplicity [42, 43] and are price sensitive [44]. Unlike early adopters, who are heavily influenced by external factors (mass media, advertising), the mainstream market is most heavily influenced by internal factors (word-of-mouth) [35, 45]. This group, especially the early majority, is responsible for an innovation’s profit and growth [46], which is why it is important to “cross the chasm" from early adopters to the mainstream market [40]. Of note, the mainstream market are pragmatists, driven by a desire to be practical [47, 48] and to avoid risks [40, 48]. The mainstream market therefore seeks guidance in deciding what to purchase, especially for risky products. Since early adopters have wider social networks and are typically opinion leaders, they serve to decrease uncertainty about a product for these later users [49, 50]. Therefore, early adopters and opinion leaders are critical to a product’s market success [46].
Three factors thus play a prominent role in a product’s ultimate success: early adopters being aware of a product, perceiving it as having value, and having reasons for adopting it that are in-line with reasons the mainstream market might be interested [49]. Failure of these latter two steps can make it difficult for innovations to matriculate from the early market to the mainstream market (cross the chasm) [40]. It is therefore important to study similarities and differences for designing for these two groups, which can then inform the creation of products that are positively viewed by both of these key market segments.
3 Methods
3.1 Participants
In order to minimize self-selection bias [51, 52], participants were recruited by diverse means. This included the first author’s personal network, Indiana University classifieds, and Reddit. Participants from the authors’ primary and secondary personal network (the largest group represented, > 50%) tended to be diverse, both in terms of education and profession (e.g., lawyer, hairstylist, unemployed); from IU classifieds, participants were either undergraduate students, data entry support staff, or faculty; from Reddit, they had a high level of interest or experience in technology (e.g., software engineer). In total, 18 adults were recruited. We used 18 participants for this in-depth exploratory, qualitative research, with the intention of deploying surveys to validate findings of this work in the future. All participants were US residents, representing various locations demographically. 10 participants identified themselves as Caucasian, 3 as Black, and 5 as other races, each of which was mentioned one time. 10 of the 18 participants identified as female, and the rest as male. Participants ranged between 21 and 64 years old. Mean age was 37.7 years (\(\sigma =11.3\)); median was 36 years.
Participants were asked to rate, on a scale of 1 to 5, their agreement with the following two statements: “I am usually the first to buy the latest technology” (Early Adopter) and “I consider myself to be impulsive” (Impulsivity). The Early Adopter question asked about technology adoption specifically, as domain-specific early adoption has been shown to correlate more highly with purchase of products than global early adopter tendencies or personal innovativeness measured as an overarching personality trait [53]. We note that even one-item self-assessments of interest in a product category have been found to correlate highly with interest in adopting a specific technology after product release, and results in a higher probability of actual adoption 4 and 12 weeks after product release (though actual adoption rates are overestimated) [54]. Participants were then classified as being Early Adopters if they self-rated a 4 or 5 in response to the Early Adopter question, or if the sum of their Early Adopter and Impulsivity ratings was 8 or higher. All other participants were classified as part of the Mainstream Market. Impulsivity scores were used as impulsivity [55,56,57] and risk-taking [38] have been associated with being an early adopter.
Therefore, 5 participants were classified as being Early Adopters and 13 as being in the Mainstream Market.Footnote 1 We asked participants about device ownership (smart speakers, wearables) as background knowledge of their experience with in-home and potentially related technology. We also used it as a general check, expecting those identifying as early adopters to own more of this technology than those in the mainstream (which was 60% vs 30.8%, in the case of smart speaker ownership). Participant characteristics, including self-rating as an Early Adopter (1–5), Impulsivity (1–5), smart speaker ownership, and wearable ownership, can be found in Table 1 (Early Adopters) and Table 2 (Mainstream Market).
3.2 Van Westendorp Price Sensitivity Meter
Van Westendorp’s Price Sensitivity Meter [58] is a common method employed in marketing research in order to determine willingness-to-pay (WTP). WTP is the price a consumer or potential consumer is willing to pay for a product. The Van Westendorp is composed of four questions, which capture pricing that is perceived as too cheap, a great value, getting expensive, and too expensive. It is designed to be analyzed by plotting the cumulative frequencies (or inverse cumulative frequencies in the case of the “too cheap” and “great value” questions) of given prices for each question using the meter [59, 60]. The intersection of prices to the questions, “at what price would you consider the product is so inexpensive that you would question its quality?” (too cheap) and “at what price would you consider the product is starting to get expensive but you still might consider it?” (getting expensive) is considered the lower bound of an acceptable price range. Using this meter, the intersection of the questions, “at what price would you consider the product to be a bargain-a great value for the money?” (great value) and “at what price would you consider the product to be so expensive that you would not consider buying it?” (too expensive) is considered the upper bound of an acceptable price range.
3.3 Holistic Product Design Cards
Recent work has argued that in HRI “much of the design research is focused on how to make a thing right” [61]. This is contrasted with the importance, but infrequency, of “gain[ing] knowledge about when designing robots is the right thing to do” and when creating robots will actually provide value [61]. This shift in thinking has become increasingly commonplace in human-computer interaction but has largely failed to crossover into HRI research. Therefore, instead of asking “how can we make a robot that will best encourage behavior change” we ask an even more fundamental set of questions: “should we design a robot for behavior change, and if so, how can it be designed to provide the most value to potential users.” We argue that a critical part of making the right thing instead of a thing right is making something that has value compared to other possible alternatives a potential user can choose, and in cases where cost is a concern, where the development of new technology and the price incurred by consumers are balanced to maximize adoption and perceived value.
Thus, a new card deck was developed, which would not assume a priori that a robot, or any new technology development, was needed. This is in contrast to the decks that already exist, which aim to help designers with designing a thing right. For example, The Robot Design Game was developed to help individuals create a robot capable of performing a particular task in a given environment, based on an additional set of cards that described physical components and other resources the system could include [62]. Kim et al. designed a VR card game, inspired by the above, consisting of a card deck containing various environment cards, along with robot part cards (e.g., facial expressions, body, accessories) [63]. In 2021, The Modality Card Deck was introduced [64]. It consists of 40 cards grouped into 10 categories, where each category represents a communication modality (e.g., movement, sound, light). Additionally, as the result of a year-long project designing domestic robots, an open source design toolkit was created by Singh, consisting of four types of cards: agent action (e.g., function, politeness), theme (e.g., role of the agent, security and privacy), personality, and design. These cards are meant to aid the design of voice-based agents [65].
However, all of these card decks rely on the implicit assumption that the device or technology should be designed in the first place. They also do not prioritize suggestions by importance or prevent users from suggesting ideas that may be incompatible within a single robot. While more general card decks exist (e.g., IDEO Method Cards, Brian Eno’s Oblique Strategies, Microsoft’s Product Reaction Cards), they support the overall design process but do not help address project specific goals [66] or do not provide potential users with adequate guidance or design ideas from which to draw (e.g., Ideation Decks). Our goal was to design a project-specific card deck meant to challenge whether new technology was necessary, given other products on the market and/or insufficient desire to adopt a solution (maintenance of the status quo). We also wanted to offer a method to help suggest what to design based on price-to-value ratio, as this ultimately influences potential users’ and consumers’ decisions.
Therefore, Holistic Product Design Cards were created. By holistic design, we mean the design of a complete product, rather than a potentially incompatible and/or not complementary set of ideal features. Holistic Product Design Cards, a new design tool created by the first author to support the method of holistic product design, was motivated by the sensor cards developed by Lee [67] and used in later work [68, 69]. In Lee, various sensors were printed on each card. Participants were asked to select three sensor cards they thought would be most valuable in a home robot and asked to explain how they would use them [67].
These Holistic Product Design Cards were introduced because they were needed to support: (1) holistic design, (2) the study of design from the perspective of maximizing intent-to-purchase, and (3) the design of robots or other technology where movement or embodied interactions are important. They aid in designing the right thing—something of value to potential technology users and consumers—or may lead to the decision to design nothing at all. These cards are therefore comprised of two sets. The first set are the Feature Cards (see Fig. 1). These cards list features along with an associated price, with more complex features being assigned a higher price. The second set are the Appearance Cards (see Fig. 2). These cards display the appearance, or embodiment, of each technology of interest or potential competitive technology. Because movement is important in the evaluation of robots [70], these use GIFs instead of static images, and thus they require virtual presentation. The GIFs showcase how the technology moves, lights up, and any other interactions enabled and supported by the technology’s embodiment. These cards also have an associated price, meant to be an approximation of market prices. In the case of the Feature Cards, participants are asked to explain how they would implement these cards into their design. In the case of the Appearance Cards, participants are asked why they made their selection and how any shown embodied interactions would be used in their design. These cards are therefore helpful in determining whether a product might be viable (based on its design) given its overall complexity and the amount potential users or consumers might be willing to pay for it. It is also possible to use these cards without prices in design studies where intent-to-purchase is not of interest.

Feature cards. Shown to participants in random order. Included descriptions of methods in literature used to promote behavior change and maintenance in addition to ways a device might be able to uniquely support change. Meant to be general enough to allow participants to explain exactly how they might implement the strategy listed based on the embodiment of the chosen technology. Pricing was determined as described in Sect. 3.4

Appearance/embodiment cards (shown here as a static image; shown to participants as GIFs). Technology included (across rows from left to right): App, Echo Dot, Blossom, Echo Show, Emo, Wearable, Bones, Mykie, Kiki, Jibo, ElliQ, Buddy, Liku, Pepper. Shown to participants in random order
3.4 Study Design
3.4.1 Interviews
Semi-structured interviews of approximately 1.5 h were conducted online, using Google Meet. The study had three main aims. The first was to identify common behaviors and habits that people want to change, how important changing these are to them, and failed and successful attempts to change these habits. The second was to identify if and how they saw technology helping in their behavior change efforts. The third was to gauge WTP for a technological solution for this purpose. To address the second aim, participants were shown a series of videos of intelligent interactive technologies (i.e., Moti,Footnote 2 Pavlok,Footnote 3 and OllyFootnote 4) and were asked to discuss if and how they might use various features of these devices to aid positive behavioral change. These three devices, in particular, were chosen to showcase a range of technological complexity and familiarity. Moti is a fairly simple technology, tracking one habit at a time and off-loading tracking of the habit performed to the user, via a button press. However, it uses sounds and lights to provide an emotional response (reward) when the habit is performed. On the other hand, Olly is far more advanced, able to track behavior by automatic detection, speak, and rotate, and is also a multi-functional smart home device for use in areas outside habit change (capable of playing music, making proactive suggestions, smart home control, etc). Pavlok was chosen because it was a wearable for behavioral change, as it was not assumed a prior that a robot would be the most desirable nor the most marketable technology for this use case. To address the third aim, which distinguishes this study from others in the design field by placing the emphasis on purchasing behavior of consumer intelligent devices, the Van Westendorp Pricing Sensitivity Meter was first used to determine a person’s WTP for an item. Then participants were shown the Holistic Product Design Cards (Figs. 1, 2) and instructed to use these cards to build their own technology.
3.4.2 Implementing Product Design Cards
The Holistic Product Design Cards were composed of a set of Feature Cards (Fig. 1) and a set of Appearance/Embodiment Cards (Fig. 2). The Feature Cards focused on aspects in literature that are known to promote behavior change and maintenance (e.g., incorporating social support, providing a reward directly after the behavior is performed) (see Sect. 2.1) as well as ways a device might be able to uniquely support people (e.g., automatic detection of behaviors performed). Specifically, we created cards to encompass the following areas: motivation, self-monitoring, social influence, triggers, rewards, psychological resources, and action and coping planning. These cards were meant to be general enough to allow participants to explain exactly how they might implement the strategy listed based on the embodiment of the chosen technology. Pre-study piloting led to the modification of the exact verbiage presented on cards, based on participant comprehension. The Appearance Cards were developed to include common technology in use (apps, smart speakers, and wearables) as well as robotic technology of varying development complexity. Though some of these have failed as products, our intent is to separate the value of the appearance of these robots from their function, as well as other reasons robots may fail (e.g., lack of funding). We also excluded the technology shown in the videos (Moti, Pavlok, Olly) from the Appearance Cards, to prevent biases, as participants were exposed to these technologies for (a) longer and (b) performing the functionality of interest. Both sets of cards (Feature Cards and Apppearance Cards) were virtually shuffled between participants.
Overall, pricing strategy was conducted so that total prices (features + embodiment) mirrored typical market prices at the time of the study (2021). Therefore, pricing on each card was determined by: (a) basing embodiment card and total pricing on current market prices of included technologies; and (b) ordering the feature card prices in order of complexity. As an additional check, we (c) verified whether total prices were more-or-less consistent with pricing of comparable robots on Kickstarter and Indiegogo. Following, more details of this process are presented.
Embodiment/appearance prices resulted by dividing the retail price of each given robot or technology by 2. In the two cases where there was no retail price (Blossom, Bones), the robots were priced in-between other robots with lower and higher technological complexity. Features were priced according to the following rules: hard-coded functionality, used with other software: $25; personalized responses, changes to body, connects to other people: $50; machine learning, advanced customization: $100; additional sensors required—potentially external: $150. The mean feature card cost was $50. The idea was to price these in order of implementation complexity, where hard-coded software features were the least expensive and anything requiring additional hardware was the most expensive. Feature pricing was also set so that market pricing of selected technologies (those in the middle of the set—i.e., wearable, Jibo) could be roughly approximated by the selection of related feature cards along with their corresponding embodiment card. There were also two cards representing per session costs (instead of one-time fixed costs), for human-led one-on-one or group coaching. Additionally a write-in card was included to capture features that participants thought important but were not otherwise represented, with pricing determined during the session, guided by the aforementioned rules.
In addition, according to past research, the range of home technology devices on Kickstarter and Indiegogo is $15 to $7,900 (based on a study including data from 2011 to 2018); the overall average price varied between social (median \(=\) 339, mean = 658) and non-social (median = 175, mean = 354) products, most of which were designed for a single functional area (e.g., health and fitness) [4]. In the current research, the range of home devices that could be designed was approximately $50 to $5300, in line with this previous research on the pricing of home robots on crowdfunding sites (e.g., selecting the Echo Dot and one feature card would result in a final product price of $50, whereas selecting the Pepper robot and all the available features would result in a price of $5300). Furthermore, we note that selecting approximately 5 function cards with the social robot Kiki ($400) or the social robot Anki ($65) sums to the mean and median, respectively, of the previously determined averages. Selecting approximately 5–6 function cards with the Echo Show ($65) or the Echo Dot ($25) sums to the mean and median of non-social technologies, respectively.
As mentioned, pricing for each device/robot appearance card was determined by dividing the current market price of the technology by two (if currently on the market) or pricing it consistently with other technology based on its design (if not on the market). We priced feature cards in order of complexity. However, pricing of each feature may not be market price (as it is hard to say what market price is for each individual feature, given the broad array of pricing strategies by individual companies). They therefore may represent more of a penalty for increasing complexity rather than exact market values. While there are some drawbacks to this pricing system (simplifies distribution of cost between hardware and software systems), it provides a general pricing schema based on the product’s complexity while being rooted in current market values. We therefore suggest that, although prices per card may not represent the exact pricing of implementation, they represent reasonable approximations when the whole product is considered.
3.4.3 Unconstrained Versus Constrained Product Design
To support holistic design, participants selected as many or as few cards from both sets to make two different designs. For their first design, their Unconstrained Design, they were asked to ignore the price data on the card and select the Feature and Appearance Cards they would choose to make their preferred design, which therefore included everything they liked or found useful. For their second design, their Price Constrained Design, they were asked to update their design, noting the prices on each card, to create a design they were most likely to purchase. Doing both allowed for a comparison of how price and competition (as competitive products were given their own Appearance Cards) affected choices. After each design, participants were asked to rate, on a scale of 1 to 5, how much they liked what they designed (Design Liking), how likely they would be to use the product if it were already in their home (Willingness to Use), and how likely they would be to purchase the product (Intent to Purchase).
3.5 Data Analysis
Interview data was first transcribed using Otter.ai. Then, the first author conducted line-by-line coding, followed by grouping codes into related categories. Code names were then revised, as appropriate. All 18 transcripts were then coded in MaxQDA using the created codebook. Finally, data was thematically analyzed [71] based on codes and categories. In addition to themes, code co-occurrence was explored, as well as code and category differences between Early Adopters and the Mainstream Market. 40 categories containing 500 codes were created to analyze the data. Approximately 15% of the data (3 interviews) was coded by a second coder, resulting in an average Cohen’s kappa of 0.81.
We note that 13 interviews (Mainstream Market) are typical and sufficient for thematic analysis, as 12 interviews have been found to provide thematic saturation, with nearly no benefit to additional interviews [72]. While 5 interviews (Early Adopters) constitute a smaller participant sample size, similar group sizes have been found to be enough for the development of codes and basic themes given a predominantly homogeneous group [73], such as the early adopter group explored here. Additionally, a systematic review paper aimed at addressing approximate qualitative sample size showed that the sample size for saturation ranges between 5 and 24 interviews, with most datasets reaching saturation between 9 and 17 interviews [74]. However, a large coverage of codes (near saturation) can be achieved with fewer interviews [73, 75, 76], allowing for the discovery of the most salient ideas. We note that as our work is exploratory, aimed at assessing larger themes, and uses more homogenous sample groups, a lower sample size is likely appropriate, even if we have not reached code saturation.
WTP was calculated in two ways: based on the Van Westendorp Price Sensitivity Meter (see Sect. 3.2) and based on the Price Constrained Designs participants created. These were calculated separately for Early Adopters and the Mainstream Market. Additionally, feature and appearance choices were analyzed for both participants’ Unconstrained Designs and their Price Constrained Designs in order to determine which aspects of the design were essential and which trade-offs individuals were willing to make for the sake of affordability. This was again done per market segment. Scores for Design Liking, Willingness to Use, and Intent to Purchase were also compared for Unconstrained Designs and Price Constrained Designs to determine how designing with price and purchase in mind affected design liking and willingness to use, and if this method resulted in designs which were likely to be more viable in a consumer market.
4 Results
4.1 Behavioral Change Goals
Behavioral changes people described wanting to make fell into three main categories: health (N \(=\) 18), productivity (N \(=\) 10), and mindfulness (N \(=\) 7).Footnote 5 These were present for both Early Adopters and the Mainstream Market, though both mindfulness and productivity goals were more common with early adopters (60% vs. 30.8%, and 80% vs. 46.2%, respectively). Health predominantly encompassed exercise (N \(=\) 15) and eating habits (N \(=\) 11), but also included reducing alcohol intake (N \(=\) 3), better oral hygiene habits (N \(=\) 2), smoking cessation (N \(=\) 1), and increasing water intake (N \(=\) 1). These health related changes were seen as high priority (N \(=\) 7). In fact, 83% of participants (10 of 12) who ranked multiple habit change goals included a health related goal as first among their desired changes. Better time management (N \(=\) 9) and reduced procrastination (N \(=\) 2) comprised the Productivity category. Mindfulness included meditation and general mindfulness (N \(=\) 5) and impulse control (N \(=\) 3). Both health (N \(=\) 5) and mindfulness (N \(=\) 3) related changes were also seen as keystone habits [14], where changing one related habit was thought to make it easier to achieve other desired changes.
Even though people described wanting to make small, realistic changes, they had been working on making these changes (mostly with no, mixed, or only short-term success) for a long time (N \(=\) 10). Early Adopters were more likely than the Mainstream Market to describe working on changes over a long period of time (100% vs 38.5%) and experiencing repeated failures (60% vs. 30.5%). All participants described a number of strategies that they had tried to aid behavioral change. Overall, tracking/seeing progress (n \(=\) 11), changing one’s mindset (n \(=\) 10), connecting with others (non-professionals) (n \(=\) 9), professional counselling/coaching (n \(=\) 8), structuring one’s day (n \(=\) 8), breaking larger goals into smaller tasks (n \(=\) 7), and “just starting” (n \(=\) 7) were the most successful, though this varied somewhat by habit. For instance, performing the habit at a certain time every day and connecting with others were the most common strategies for exercise, but tracking progress, changing one’s mindset, and mindfulness were the most common strategies for eating healthier. The Mainstream Market was more likely than Early Adopters to use strategies requiring mental effort (i.e., mindfulness, changing mindset) (61.5% vs. 20%). Restriction was generally an unsuccessful strategy.
4.2 Roadblocks to Behavioral Change
Participants described many roadblocks to their success. The predominant roadblock was their feelings and cognitive resources (N \(=\) 13), specifically lacking motivation, mental resources, and not having the right mindset, as well as being stressed and anxious. This theme was pervasive among Early Adopters and the Mainstream Market (though slightly more common among the former). Lifestyle factors (N \(=\) 10) were also a big reason participants had difficulties with behavior and habit change, such as work or struggling to continue a habit after a major life change (e.g., moving or otherwise changing one’s environment). This was followed by changes due to the pandemic (N \(=\) 8), the influence of having other people in their home surroundings (N \(=\) 7), positive aspects of not changing (N \(=\) 6), and evening inertia (N \(=\) 5). As well, people mostly commented that maintaining desired behaviors over time was difficult (N \(=\) 6)—actually making them into habits—as opposed to getting started in the first place (behavior change initiation). Despite positive aspects of not changing, participants wanted to implement and stick to their desired changes because not changing affected their mood (N \(=\) 8) and caused anxiety (N \(=\) 4).
4.3 Reaction to Technology Videos
4.3.1 Moti
Participants had a positive first impression of Moti (N \(=\) 13) and mostly liked its aesthetic (N \(=\) 12). It was positively viewed as cute (N \(=\) 5), inconspicuous (N \(=\) 5), and simple (N \(=\) 4), but also negatively viewed as juvenile (N \(=\) 5). Specifically, it was described as cartoonish, too cutesy, and childish. Participants liked that it was tactile and saw the potential for this to help with habit building (N \(=\) 14). “Maybe you just like hitting that button... because that becomes a habit too in itself. Like oh, I didn’t hit the button today? What did I do wrong to not get to hit it?" [P2]. “There’s always something satisfying about a touch interaction." [P9]. Furthermore, they saw the benefit of a separate device over an app or smartphone (N \(=\) 8). “I think it was very interesting having a piece of technology that doesn’t look like a phone first and foremost... it glows and it lights up, and so I’m being incentivized to at least pay attention to it, by factor of it doing something that my other technological products around me don’t do." [P3]. Related to the video itself, many participants positively commented on the fact that habit formation, and how the technology would intervene in this process, was well explained in the video, and felt like they could relate to behavior change as part of the habit loop (trigger-action-reward) described.
4.3.2 Pavlok
Despite being the only product currently on the market, most people had a negative first impression of Pavlok (N \(=\) 11). This was related mostly to the fact that it was meant to shock you when you were engaged in a behavior you wanted to disrupt (N \(=\) 13), but also because it was difficult to grasp from the marketing video how the technology worked (N \(=\) 3). “I didn’t really get a clear idea of how it was going to do what it says it’s going to do." [P1]. However, people saw the value in having a wearable (N \(=\) 7), which would be constantly with you. This was seen as an advantage over Moti.
The video of Pavlok also allowed for a discussion of whether, and how, negative reinforcement might work with technology. Though participants wanted a technology that would be more positive than negative (N \(=\) 12), they imagined how disrupting undesirable behaviors could be implemented. “For example, instead of shocking me, what if it just got warm, but also gave me a color indication" [P3]. “I guess some sort of vibration at a certain time if it didn’t sense it [the activity]. I know that once five o’clock hits, I’m probably not going to work out." [P4].
4.3.3 Olly
Individuals liked the aesthetics of Olly (N \(=\) 15), even more so than Moti. The physical design was described as unique (N \(=\) 5), elegant (N \(=\) 3), and cool (N \(=\) 3). “I really did like the one that you had there. I mean I liked the lights and they changed. It moved around. It was interesting and it was almost artistic. So, I found that aesthetically pleasing." [P14]. However, the overall impression of Olly was split. While its behaviors were viewed positively by some, they were described by others as horrifying, creepy, weird, or annoying (N \(=\) 4). Olly also provoked angst over being watched and monitored (N \(=\) 10), even among early adopters. “I guess it’s a double-edged sword... if it was sitting on my nightstand, and I got up in the morning and didn’t make my bed, it could see that, right. But then at the same time, I don’t really know if I want that thing sitting down literally watching me." [P13]. “Because it watches your every movement. Which is cool, but at the same time, some technology is a little scary. So I mean, that like puts in everything that we were saying would be great. You know, if they could sense things. But I mean, it really watched you." [P4]. “And so that’s, yeah, I feel the judgment. So I feel the judgment a little too much. And I get nervous about it." [P7]. Other features, like its proactivity and automatic detection capabilities, were positively viewed by some (early adopters) and not others (the mainstream market).
4.3.4 Science and Technology Education
The perceived design of a technological product can be influenced by the way that is presented, making the design of its introduction to potential consumers important. Therefore, one marketing video related insight that emerged from discussions of the technologies in the videos was that people wanted to be informed about the science of habit change (N \(=\) 6) as well as a clearer explanation of how the technology actually worked (N \(=\) 9). This desire to know how the technology worked was true of more advanced features, such as how the personality and personalization of Olly was implemented as well as more essential features to the technology. “I don’t think it was very clear how it [Moti] would help you track things... Is this just going to ding you every time you walk by and you’re not doing yoga, or is it basically just like an Alexa reminding you have yoga sessions scheduled in 10 min? Yeah, so I’m not really sure." [P16]. The videos demonstrated the technology in a way that was sometimes seen as obscuring the implementation, giving rise to questions on whether they would work as described or would be of personal benefit. “It seems like it’s [Olly’s] sort of marketing itself as I’m everything and anything you want me to be. And I know that can’t be true." [P9]. Clearly explaining the how, in addition to the what and the why, may be especially important for robotic and other advanced technology, where people may not have a strong cognitive model of how it can achieve what’s advertised.
4.4 Early Adopters
4.4.1 Relationship with Technology
Early adopters (N \(=\) 5) described being comfortable with technology (N \(=\) 4) as well as generally knowledgeable about it (N \(=\) 2), and had no fear of artificial intelligence (AI). In fact, most already had a smart speaker, such as Alexa, in their home (N \(=\) 3). However, they did have privacy concerns surrounding using advanced home technology (N \(=\) 4), triggered by being watched (N \(=\) 3) (see Sect. 4.3.3) and heavily linked to the use of a camera (N \(=\) 3). “Because it does have these cameras and it can identify where you are in the room... you know things like that they can, I think, easily be hacked. So it just makes me [feel] vulnerable." [P11]. One of these individuals even described their related privacy-enhancing behavior, which was to turn off the camera on their Google Home when not needed. She had no issues with always-on audio. “I’m okay with that. We don’t really have anything to not listen to.” [P4]. Early adopters expressed that the device should keep them accountable (N \(=\) 4), and did not have concerns about the potential pervasiveness or intrusiveness of home technology.
4.4.2 Ideal Design
It is therefore consistent that they all indicated wanting technology to be proactive (N \(=\) 5), offering suggestions and intervening as appropriate. “There’s certain parts of the day where people tend to be more impulsive, right, and make the wrong decisions. So if that could be preemptive, and be like, Hey, you know, it’s about that time you need to think about [this]." [P6]. As well, in line with their willingness to use technology that was pervasive and proactive, early adopters wanted technology to be capable of automatic detection (N \(=\) 4), though several individuals expressed that they wanted this detection to be through ‘low fidelity’ sensors (detection through sensors instead of video recorded by a camera). Particularly, they wanted automatic detection to determine their behaviors (N \(=\) 4), ideal time(s) the target habit or behavior be performed (N \(=\) 4), and, to a lesser extent, mood (N \(=\) 1). They were also generally ok with manual input and tracking instead of automatic detection (N \(=\) 3). As many individuals also wanted the robot to help keep their stress low, they wanted the device to be able to intuit, sense, or learn when the best times to intervene would be, in order to offer ‘just in time’ mindfulness and stress management (N \(=\) 3). Additionally, they wanted a multi-functional (N \(=\) 3) and potentially multi-user (N \(=\) 3) robot. They also wanted the robot to integrate with existing devices, such as their smartphones (N \(=\) 3) and wearables (N \(=\) 3), and be capable of smart home control (N \(=\) 2). Ideally, this would be an all-in-one to replace their current smart speaker (N \(=\) 2), but a device capable of integration was also seen as acceptable.
Early adopters wanted multi-modal verbal communication, with the robot using sounds and speech to interact and reflect their progress. Four participants mentioned wanting a device that would speak (N \(=\) 4), additionally noting that the way it speaks is important (N \(=\) 3). “To motivate the person [it has] to be keen on what kind of language resonates with the person individually.” [P6]. “It might even speak and say hey [P1], because nobody calls me [P1]. That was my name as a little girl. But that always makes me feel cared for.” [P1]. Additionally, they wanted to be able to communicate to the robot using speech as well, by issuing voice commands (N \(=\) 4). With regard to motion, they valued movement and mobility (N \(=\) 3), with the robot being able to transverse through their homes.

Early adopters unconstrained appearance choices from the holistic product design cards activity. Selections by (from left to right): P11, P6, P13, P4, P1. [*P13 chose a hybrid of Buddy and the Echo Show (mobile Echo Show).] Appearance card prices from left to right: $4500, $1500, $775 $750, $25

Early adopters price constrained appearance choices from the holistic product design cards activity selections by (from left to right): P11, P6, P13, P4, P1. Appearance card prices from left to right: $25, $775, $65, $65, $25
While early adopters wanted a robot with personality (N \(=\) 5), they did not specify a preference for one that was determined wholly by the technology or selectable based on their input. They also wanted a technology that had emotions (N \(=\) 3), was interactive, and adaptive. They described the overall experience as needing to be engaging (N \(=\) 3), gentle (N \(=\) 2), and encouraging (N \(=\) 2). Regarding aspects of change through social connection, they wanted to be able to connect and share progress with people they designated (N \(=\) 3). “There are certain people that I know that would keep me accountable." [P4]. They also wanted to have the option to engage in one-on-one professional coaching through the device (N \(=\) 2). “It is not a human being, that robot is not a therapist, but maybe it should be smart enough to know when to recommend such. This might be a good week to talk to your dietitian, to your nurse practitioner, to your therapist, to... whoever the professional is." [P13]. Some were also intrigued with the possibility of the device itself acting like the coach (N \(=\) 2). “It would be like a normal person coming to you. What’s troubling you? Why are you having a hard time? And then kind of like setting reminders like, Hey, remember, we decided that you’re going to not eat unhealthy because you really wanted to work on reducing your risk for heart disease. Or you’re going on an upcoming vacation and you wanted to wear a bathing suit. Something conversational, conversational reminders." [P6].
With regard to features essential to this use case, early adopters wanted a device to offer reminders (N \(=\) 5), with a preference for using machine learning to find ideal times to issue them (N \(=\) 2) and motivating them by reminding them why the change is beneficial (N \(=\) 3). They wanted the technology to intervene both before (N \(=\) 5) and after (N \(=\) 5) relapse (i.e., if they are no longer engaged in the desired behaviors), for it to track their progress (N \(=\) 4), and for it to reward them immediately after they performed the target behavior (N \(=\) 3). Additionally, they wanted it to help keep their stress low (N \(=\) 4), preferably by proactively offering ‘just-in-time’ interventions (N \(=\) 3). They expected that it would be portable, which meant they would either be able to bring it with them or connect it to app they could use when not in the home (N \(=\) 3), and that it would be able to work for multiple habits simultaneously.
As for physical qualities, early adopters wanted the technology to not only have human-like features, but also have a human-like appearance (N \(=\) 3). They all liked the use of color and lights as a communication and feedback mechanism. Additionally, some thought it was important for the device to have a screen (N \(=\) 2), either for tracking or to display emotions. “Like a screen that’s like [a] happy face where you’re doing a great job or like a sad face, or just something that’s more connected to humans, like human similarity where it’s like an actual person." [P6]. Their selections from the Holistic Product Design Cards activity are represented in Fig. 3.

LEFT: most popular feature card selections from the price constrained designs of early adopters (N \(=\) 5). The number in the colored cell represents the number of participants selecting that card. A black tag indicates the card was selected by at least 50% of participants, while a grey tag indicates selection by 35–49%.; RIGHT: feature cards selected by at least 35% of participants in their unconstrained designs, but <35% when creating price constrained designs
4.4.3 Purchase-Based Design
Though early adopters chose human-like and mobile robots for their preferred design, three out of five downgraded to either the Echo Show or Echo Dot when considering price, resulting in four out of five choosing one of these appearances. Their selections from the Holistic Product Design Cards activity, when considering price, are represented in Fig. 4.
Additionally, feature cards were coded for those selected by at least 35% of participants, in both the case of the Unconstrained Designs and Price Constrained Designs. While features related to connecting to others (professionals and non-professionals) were seen as desirable, they were not worth the added cost that they brought. This was also true for reminders at regular intervals, stress reduction capabilities, and the behaviors and abilities of the technology changing in response to their success. Therefore, these were determined to be low value features (Fig. 5 right). High value features, those kept with high frequency in their Price Constrained Designs, are also included in this figure. A black tag represents selections by over 50% of participants in their Price Constrained Designs, while a grey tag indicates selection by 35–49% of participants (Fig. 5 left). As can be seen in this figure, strategy guidance for implementing new habits and behavior relapse recovery, automatic detection of behaviors and use of machine learning to find ideal times to perform the behavior, use of emotion, tracking using an app, and the robot acting or being designed as the trigger to perform the action were the most important and valuable features. Tracking using voice commands, providing a reward immediately after the behavior is performed, and providing motivation by giving information about why the change is good for them were also of value, though less commonly so.
The ‘write-in’ card was used twice when creating Price-Constrained Designs. Two participants paid extra to ensure the robot had an adaptive personality ($50) and one of these two paid an additional amount ($50) to ensure personalized language. While the ‘write-in’ card was used an additional time for an Unconstrained Design to add smart-home functionality ($100), it was removed to reduce the cost of the participant’s final product design.
4.5 The Mainstream Market
4.5.1 Relationship with Technology
While those in the mainstream market (N \(=\) 13) described themselves as comfortable with technology (N \(=\) 9), they mentioned a fear of AI specifically (N \(=\) 7). “AI technology does make me a little nervous.” [P2]. “It makes me uncomfortable.” [P7]. “It’s fascinating, but I don’t trust it.” [P18]. Most did not have a smart speaker in their home (N \(=\) 9); furthermore, many did not want to adopt this technology (N \(=\) 5). Of the four individuals who did have an Alexa or other smart speaker, two mentioned no longer using it. Discontinued use was related to privacy: “I have an Alexa. It’s not plugged in. It hasn’t been plugged in for over a year... I just started seeing all the stories about how Amazon was storing everything you said ever. Listening back to it. I was like, okay, I don’t need to be involved in that.” [P9]. Like early adopters, they had privacy concerns about using a home device (N \(=\) 9). These concerns were only partially explainable by use of the camera (N \(=\) 4). It was also triggered by concerns with feeling watched and monitored more generally (N \(=\) 7) and like the technology would be too pervasive and intrusive (N \(=\) 7). “But something about some automated technological system tracking my whereabouts and all my movements just throws me off. Especially that it has a camera. So therefore, who’s to say that someone can’t tap into my feed. And also, it’s supposed to give the sense that its omniscient, right, or omnipresent with you? And I don’t need that. I don’t need you to make song suggestions. Because it seems like... it would feel as though there’s someone else in my vicinity.” [P3]. Being constantly connected to a device was also viewed differently than being connected to an app via the internet. “Yes. I mean, that’s a thing." [P18]. In addition to these views on home robots more generally, they also believed that they had to be personally accountable for any behavior change (N \(=\) 7), and technology could only be a tool to help their own agency.
4.5.2 Ideal Design
Due to these reasons, they did not want a robot that was proactive (N \(=\) 6) and wanted to be left in control (N \(=\) 6). Referring to Moti, “And it’s subtle, and it’s simple. And I just need to press the button to interact with it. So I feel like I’m in control of it.” [P3]. Consistent with their desire to maintain control, those in the mainstream preferred manual input and tracking over automating this process (N \(=\) 7). However, some also liked the idea of tracking via ‘low fidelity’ sensors (N \(=\) 4). While they wanted the device/robot to have personality (N \(=\) 10), they wanted to be able to exercise control over what it would be like (N \(=\) 5), such as being able to select dimensions of its personality. This was also related to concerns over incompatibility. “What if Olly becomes sassy based off my personality... I don’t want to have an argument with Olly and feel like we need to take a break from each other.” [P3]. “I am concerned about my own personal feelings towards Olly, that maybe he and I would not be compatible, even though they say Olly’s going to mold itself to your personality.” [P9].

Most popular feature card selections from the unconstrained designs of the mainstream market (N \(=\) 13). The number in the colored cell represents the number of participants selecting that card. A black tag indicates the card was selected by at least 50% of participants, while a grey tag indicates selection by 35–49%
Compared with early adopters, this user group was also less enthused about device integration and multi-functionality (functionality outside of that meant for habit building). While they wanted, and expected, the device to integrate with their phone (N \(=\) 9), they did not want it to be integrated with other devices (N \(=\) 5). They were split on the idea of a device that would be multi-functional, with about equal numbers wanting and not wanting this capability. When it was mentioned, multi-functionality for mainstream users consisted mainly of suggestions for smart home capabilities (N \(=\) 4), though a few users indicated a desire for other functionality, such as use to help schedule general appointments, learn a language, or vacuum.
While participants wanted technology that used sounds to communicate (N \(=\) 8), most did not want it to speak (N \(=\) 7), though a smaller subset valued this feature (N \(=\) 5). However, more individuals found voice commands to be useful (N \(=\) 6), though feelings were still mixed, with some commenting that this feature was not necessary or desirable (N \(=\) 3), and few participants including it in their Unconstrained or Price Constrained designs. Though nearly all participants had a desire for technology that could move in place (N \(=\) 12), they did not want it to be mobile. Some participants also expressed that the way the robot moved was important (N \(=\) 4). “Well, I just think all the other ones have too much movement. They’ve got arms and hands so it’s just more parts moving... That one [Olly] was just one continuous part and one range of motion.” [P14]. They also wanted to use a device that had emotions (N \(=\) 8), was interactive (N \(=\) 7), and adaptive. Regarding aspects of change through social connection, they tended not to want to connect with others for support or to share their progress (N \(=\) 5) and most did not have a desire to engage in one-on-one or group coaching through the device, though some felt it would be a nice option to have available (N \(=\) 5).

Selections by (across rows from left to right): P3, P14, P5, P17, P9, P7, P12, P15, P10, P18, P2, P16, P8. Appearance card prices from left to right: $65, $65, $150, $150, $45, $450, $775, $65, $25, $150, $65, $45, $400
With regards to features essential to this use case, they wanted a device to offer reminders (N \(=\) 10). They also wanted the technology to intervene both before (N \(=\) 6) and after (N \(=\) 8) relapse, for it to track their progress (N \(=\) 10) and provide related reports (N \(=\) 5), and for it to reward them immediately after performance of the target behavior (N \(=\) 9). Additionally, they wanted it to help keep their stress low (N \(=\) 8). Like early adopters, they expected that it would be portable, which again meant they would either be able bring it with them or could connect to an app they could use when not in the home (N \(=\) 9), and that it would be able to work for multiple habits simultaneously (N \(=\) 5). Overall, they wanted the experience with the technology to be gentle (N \(=\) 5) and not intrusive or overbearing (N \(=\) 6). Their feature selections from the Holistic Product Design Cards activity (Unconstrained Design) are represented in Fig. 6. A black tag represents selections of a given feature by over 50% of participants, while a grey tag indicates selection by 35–49% of participants. The ‘write-in’ card was used three times: once to add smart home capabilities, once to add adaptive language, and once to add smartwatch capabilities.
As for physical qualities, the mainstream market did not want the technology to look human-like (N \(=\) 8), though they were positive about animal-like (N \(=\) 5), life-like (N \(=\) 3), and sculptural and geometric (machine-like) (N \(=\) 3) physical designs. In particular, this market segment did not want technology with a face and eyes (N \(=\) 6). “I’m like, yeah, that [Mykie] definitely is, like, not as creepy, but I wouldn’t buy it just because of the eyes.” [P8]. “I think people want those eyes to make it feel more human, then they’re connected to it. But to me, it’s just kind of creepy. So of note, we have this sort of cat without eyes [Blossom].” [P17]. “The face and kind of its ability to rotate that screen like it’s a head doesn’t sit with me.” [P12]. “So nothing with eyes. Because, that means for me, I think that means like camera in my head.” [P3]. As is illustrative from this last quote, eyes were a clear visual signal to participants that they were being watched or recorded, and this felt intrusive and privacy violating. Like early adopters, they liked the use of color and lights for aesthetic purposes and as a communication and feedback mechanism (N \(=\) 11). Additionally, it was also important that the device be small in size (N \(=\) 7). Their selections from the Holistic Product Design Cards activity (Unconstrained Design) are represented in Fig. 7.
4.5.3 Purchase-Based Design
Five participants downgraded their Appearance Card choices, switching to an app (N \(=\) 3), the Echo Dot (N \(=\) 1), or a less embodied robot (N \(=\) 1). In the end, nine participants selected an existing technology (with five selecting an Amazon Echo Device (Show or Dot), three an app, and one a wearable). The remaining four selected a minimally-embodied robot, with two selecting Blossom and two selecting Emo.
For this design, participants selected 4.2 feature cards on average (down from 6.8). As with the Unconstrained Designs, feature cards for Price Constrained Designs were coded for those selected by at least 35% of participants. Only two met this criteria: tracking using an app (N \(=\) 7, 53.8%) and providing a reward immediately after the behavior is performed (N \(=\) 7, 53.8%). When participants who selected an app were excluded from analysis (N \(=\) 3), physical reflection of progress, helping to keep stress low, helping to develop implementation strategies, and detecting engagement in behavior (without using cameras) also met this criteria and were therefore seen as valuable in a more embodied solution.
4.6 Willingness-to-Pay (WTP)
4.6.1 Mainstream Market
According to the Van Westendorp Pricing Sensitivity Meter, the acceptable price range for a technology product for habit change is between $75 and $110 for those in the mainstream. This analysis included the 12 (of 13) mainstream market participants who said they would use technology (of any sort) for habit change; P18 stated they would not, outside of the free app they already used, so this participant was not included in pricing analyses. The mean and median values to the four questions (technology too expensive, too cheap, getting expensive, and great value) are included in Table 3. A boxplot of all values can be found in Fig. 8. Participants designed a technology (Price Constrained Design) with a median value of $228. The mean Intent to Purchase score for these designs was 3.3 (median 4.0). When participants selecting an app were excluded, the mean Intent to Purchase score was 3.7 (median 4.0), with a median price of $268.50 (N \(=\) 10). [This can be contrasted with the higher average price of the mainstream markets’ ideal, Unconstrained Designs (median \(=\) $407.50, mean \(=\) $529.17)].
4.6.2 Early Adopters
The upper bound of the acceptable price range, according to the Van Westendorp Pricing Sensitivity Meter, was $300 for early adopters, approximately $200 higher than that of the mainstream market. The mean and median values to the four questions (technology too expensive, too cheap, getting expensive, and great value) are included in Table 3. A boxplot of all values can be found in Fig. 8. This two hundred dollar difference was also echoed by the technology that participants actually designed. Those who were early adopters (5 participants) designed a technology, with intent-to-purchase in mind (Price Constrained Design), that had a median value of $465. The mean Intent to Purchase score for these participants was 4.4 (median 4.0). [This is considerably lower than the price of early adopters’ ideal, Unconstrained Designs (median \(=\) $1450, mean \(=\) $2025)].
4.6.3 Price Anchoring
Participants mainly drew on the price of other available technological devices (N \(=\) 5) as an anchor for the amount they were willing to pay. Smart speaker prices in particular were one available reference. “You know, I use the Dot in my home, which connects to Alexa. And they’re, they’re relatively inexpensive. You know, around $20, $30." [P14]. P15, who was explicitly asked if he was using existing technology or the product’s features as a guide to expected cost and his WTP, responded, “Kind of a bit of both. A little bit more skewed towards what the technology can do. But still thinking about other kinds of like, I mean, from just thinking about like smart speakers and things along those lines." Participants also justified cost, and anchored their WTP, around the price of wearables (N \(=\) 3) and their smartphones (N \(=\) 2). Two participants stated that the hardware and outward appearance drives the amount they expect to pay, while two mentioned that the features drive this expectation. It is worth noting that this data mainly comes for those in the mainstream market. It was not common for early adopters to mention how they arrived at their WTP, and therefore this price anchoring strategy may be more relevant for the mainstream.

Boxplot of Van Westendorp for early adopters and the mainstream market. This shows that Early Adopters (grey) generally display different price sensitivities for home robots for behavior change than those in the Mainstream (pink)
4.7 Comparing Liking and Use Intent of Unconstrained and Price Constrained Designs
Asking participants to consider price in their designs increased their Intent to Purchase them (Table 4), doubling the number of participants who were likely to purchase. In addition, their design liking and use intent did not suffer. Participants’ (N \(=\) 18) mean Design Liking scores were 4.22 for both design scenarios. For Willingness to Use, participants’ mean rating was slightly higher (4.78 vs. 4.61) for the Price Constrained Design. Table 4 summarizes this information in a slightly different way, where a score of 1 or 2 was categorized as would not use, a score of 3 was categorized as neutral about use, and a score of 4 or 5 was categorized as willing to use (and this information is similarly summarized for design liking and intent to purchase). This finding can be partially explained by a natural tendency toward overdesign. “I think I would be more proud of myself if I had the one that I defined that was like cheaper, more practical, and made me feel more independent in developing this on my own. This one [Unconstrained Design] like it has more. So it seems cool, but it’s also like kind of extra. So I would feel a little bit extra using it." [P8]. Interpretations also happen within a given context, thus people’s perception of value may also influence their overall liking. When asked whether he indeed liked his Price Constrained Design more than his Unconstrained Design, after giving it a higher score, P15 said, “Not necessarily more, but when you factor in price and kind of look at it holistically, then I would say yes."
Comparing these two designs (Unconstrained and Price Constrained) reveals that when people factor in cost they: (1) produce simpler designs, (2) have a greater intent to purchase these designs, and (3) do not reduce their liking and intention to use these designs. Though feature cards could be implemented differently by each participant (which is why we discuss features more broadly, e.g., finding mainstream participants wanted to be in control of the technology’s personality, while not discussing exactly how they would like this to occur, which would be best served by the utilization of other design methods), each feature card did refer to a specific type of functionality that would require similar types of software and data collection. Our results show that most people will simplify their designs considerably, reducing both functionality and embodiment, when considering price, while still maintaining the same overall liking and intention to use. This shows that traditional methods of designing robots are likely to lead to overdesigned products, and products that may not perform well in the marketplace.
5 Discussion
5.1 Differences by Market Segment
5.1.1 Desired Robot Form
Previous research has been contradictory over the preferred form of home robots (see Sect. 2.3), sometimes finding a preference for machine-like robots, sometimes for human-like robots, and sometimes no preference at all (form follows function). Age has been identified as one factor affecting preference and explaining differences in findings, with older adults preferring machine-like robots and younger adults human-like robots [24, 25]. Culture and method of presenting choices are also likely to influence expressed preferences (see Sect. 2.3). This work finds that there are also unique preferences based on market segment. Those who are technology early adopters have a preference for human-like robots, while those who are not tend not to like this form. Instead, those who do not identify as early adopters prefer small machine-like robots, animal-like robots, or life-like (but not human-like) robots. It additionally shows that non-early adopters’ aversion to human-like robots can be partially attributed to the face and eyes of these robots, which may make the technology seem particularly intrusive and give rise to privacy concerns. However, beyond this reason, there seemed to be a broader belief among this group that robots should not look like humans. This belief may be part of the reason why human-like robots have yet to find wider appeal in the marketplace. However, this research suggests that these individuals (those reporting lower propensity toward technology early adoption) are also favorable toward animal-like and life-like home robots, as well as machine-like ones, though these are likely to be more positively viewed if they are abstractly represented (no or minimal facial features).
5.1.2 Attitudinal Differences Informing Choices
Early adopters and later adopters (i.e., the mainstream) not only exhibit differences in their technology preferences, but in the attitudes that prompt their choices. Early adopters are known to be more prone to risk taking, novelty seeking, and impulsivity, and exhibit an openness to advanced technology (see Sects. 2.5, 4.4.1, and Table 1). This orientation led to various design choices, such as a desire for humanoid robots, proactive and omnipresent technology, an ability to cede control to technology, and a seeming choice to weight the benefits of novel technology over their concerns about privacy.
Due to early adopters’ higher impulsiveness, they may also be likely to receive greater benefits from behavior and habit change technology, as they are more likely to struggle to maintain behavioral changes. Though feelings and cognitive resources (such as stress and mindset) were the major roadblocks to maintaining behavior change for both early adopters and those in the mainstream, early adopters placed a lower value on this related feature (using the technology to help keep stress low) in their designs. This finding is consistent with their overall decreased use of mindfulness-based strategies to maintain change, as compared with those in the mainstream. However, such strategies are likely to contribute to the effectiveness of the technology for this group. This is germane for purchase and intent to purchase (as well as long-term benefits and use) as other than design and affordability, effectiveness was the number one factor that participants noted would influence their purchasing decisions for technology related to behavior change. Therefore, advertisements of related technology aimed at early adopters should clearly highlight the relation of features meant to help manage stress and psychological resources to the effectiveness of the technology, or link it with another feature that they already perceive as high value, such as using machine learning to find ideal times to make suggestions. For example, the technology might ask them about their stress levels during certain times of the day when their stress tends to be higher, then suggest ways they might lower their levels (e.g., going for a walk or meditating). It might alternatively offer to guide them through meditation or breathing exercises at the times of the day they tend to be more stressed.
Contrary to early adopters, those in the mainstream are typically risk-averse, less impulsive, pragmatic and price sensitive, and more concerned with being in control. Therefore, they see technology as something that should support their own autonomy and provide concrete, value-driven benefits. This translates into a desire for technology that is more minimalistic and less proactive and intrusive, as well as an aversion to human-like robots. Their desire for privacy is also likely to have a concrete impact on their decisions to adopt technology. Therefore, robot designs targeted toward the mainstream market should emphasize privacy maintenance features and these should be highlighted in video and other advertisements that occur in later stages of product diffusion (after adoption has already occurred by early adopters).
This study also suggests caution be applied when recruiting participants for design studies in HRI. The above findings show the chasm of opinion and behavior that exist between early adopters and later adopters of technology. As early adopters may be more likely to volunteer for studies due to a pre-existing interest in technology, it is possible that their preferences are over-represented in studies in HRI. However, with practices of recruiting from the university student pool and due to the larger size of the mainstream market, the reverse might also be true. Therefore, stratifying recruitment based on likelihood to adopt technology may produce a more balanced view of preferences for domestic robots. At the least, it is important to include a measure of adoption and/or comfort with AI (as opposed to comfort with technology in general) and include this information as participant background to aid interpretability of findings.
5.2 Designing for Marketplace Success
To design technologies meant for wide adoption, the needs of both the early adopters and the mainstream (i.e., early majority) need to be understood [41], with reconciliation of differences likely needing to occur [4] or otherwise overcome. One potentially promising strategy is to design at the intersection of what early adopters are willing to purchase and what the early majority (mainstream) desire, even in the presence of low purchasing intent by the latter. As robotic technology becomes more visible and is reviewed by early adopters, risk and uncertainty surrounding the new innovation will likely decrease over time, addressing these important factors for those in the mainstream. Price is also likely to decrease over time, relevant for this highly price sensitive market segment.

Ideal and purchase-based feature selections for both early adopters and the mainstream market. The following guidelines resulted in this table’s creation: \(\ge \) 80% of participants who commented on feature commented positively or included it in their design (marked with ‘yes’); \(\ge \) 80% of participants who commented on feature commented negatively or failed to include it in their design (marked with ‘no’); roughly equal split of positive and negative comments or feature inclusion (marked with ‘mixed’); not directly tested and no data on feature given by participants (marked with ‘not tested’); features were positively discussed, though due to absence of more minimally embodied designs, it could not be determined whether these features added value over their corresponding cost (marked with ‘insufficent data’)

Ideal and purchase-based appearance (form) selections for both early adopters and the mainstream market. Appearance should be simple, elegant, and cute without being juvenile or toy-like
We develop specific recommendations based on our findings from this study, with findings listed in Figs. 9 and 10 to show the differences in choices between early adopters and the mainstream, for ideal and purchase-based features and appearance. Accordingly, we suggest that robots be designed to have personality and proactivity levels that are manually controllable via settings. They should be able to automatically detect certain actions and user states, but do so using low-level sensors (i.e., no camera). Fundamental to robot communication modalities are the use of sound and color. Whether verbal communication (to and from the robot) is needed is unclear due to mixed opinions on this feature and is likely to vary based on the exact functionality of the robot; perhaps in certain situations, limited verbal communication could be a way to get users accustomed to this feature before it is more widely accepted, if needed at all. An ability to display emotions is also highly valued and should be incorporated into the design of these robots. However, the robot acting as a social facilitator is not important for consumers of this technology, as this was seen as not providing value over existing methods of connecting with people inside or outside their social network, or was simply seen as undesirable. These should be desktop (not mobile) robots, likely with some elements of movement. What becomes clear based on current robot availability is that there is a need to design and test more minimally embodied robots, somewhere between an Echo Dot and a Jibo. Because of the limited number of commercially available robots in this range (that are not toys), the present study could only determine that minimally embodied robots would be highly desirable; later studies could explore the benefits of different aspects of minimalist design (e.g. exact form, types of movement, sound). Whether movement is worth the added cost that it may bring still needs to be empirically determined. With regard to the form that the robot should take, machine-like robots would be acceptable to both groups (see Fig. 10). As with movement, more work needs to be done to validate whether animal-like and life-like (but not human-like) robots should also be the focus of consumer design, though this is also supported by prior research on early adopters [4].
This work only tackles one area—the importance of home robot design features as viewed by potential users—important in designing for initial marketplace success. As product reviews from other consumers also matter to the mainstream [35], it is important to incorporate research regarding long-term interaction and engagement with robots within the home into robot design. Work by several researchers indicates that various factors, such as social presence, enjoyment, and learning, positively affect long-term interaction [77, 78]. Whether early adopters and later adopters evaluate successful long-term interaction with social domestic robots using the same determining factors is currently unanswered. It is also not widely known whether the current literature on long-term interaction includes users who identify as early adopters, mainstream users, or both.
This design research may also help explain past robot failures. Previous work has found that home robots, overall, are not failing more than other innovative technology [4]. However, it also found that particular types of domestic robots—multi-functional, multi-generational (family), and high priced—may be failing at higher rates than other robots [4]. Our current research supports the conclusion that multi-functional robots are likely particularly prone to failure on the consumer market, presently. For early adopters, this will simply be attributable to their higher price. On the other hand, for many in the mainstream, there appears to be a distaste for technological integration. As for the adoption of humanoid robots, for early adopters, price also presents as the predominant barrier to adoption. However, this comes down to an aversion to these robots for the more pragmatic mainstream market. Since, for both groups, upfront price serves to curtail the adoption of devices that are as feature robust as desired, we echo a previous recommendation suggesting that robots be offered as a cheaper base version, or customizable, with the option to include add-on features at a later date [4]. The ability to customize one’s design has also been shown to foster psychological ownership, thereby increasing intent to purchase and willingness to pay [79, 80]. A model such as this was also alluded to by several of the participants in this study, offering more empirical support for its value.
5.3 Privacy and the Privacy Paradox
Work by Burgoon 1982 identified four dimensions of privacy: informational, physical, psychological, and social [81]. Most relevant to discussions of robots entering our homes are informational and physical privacy. Informational privacy centers on being able to control if and how information about oneself is collected and used. Physical privacy means being free from unwanted invasions to personal space, intrusion, and observation [82]. Our study finds that both technology early adopters and the mainstream hold both types of these privacy concerns.
The Privacy Paradox, which has been mostly applied to online information disclosure, states that privacy concerns do not translate into privacy protection behavior [83] and intended behavior [84]. There is debate over whether this paradox exists [85, 86], with arguments in favor of a model of ‘privacy calculus’—stating that information disclosure is a rational choice which balances possible gains of disclose with the presence of privacy concerns [87]. Other research has questioned whether this is enough to explain the discrepancy [88]. Previous research has found that perceived benefits and social influence (social norms) are two important factors in this equation [84]. Other research has shown that privacy concerns do in fact have a significant impact on privacy behavior [89, 90], with one study finding that the type of privacy concerns (e.g., information, social) influences corresponding behaviors related to that type [86].
Christoph Lutz and Aurelia Tamó-Larrieux have begun to explore this potential Privacy Paradox within human-robot interaction, initially finding evidence for this phenomenon through use of a survey [91]. However, later work with vignettes found a strong effect of privacy concerns on behavioral intention [92]. This work also showed the direct effect of perceived benefits and social influence on robot use intention. This later finding is consistent with modelling based on larger scale survey data showing that privacy concerns affect use intentions of domestic robots and beliefs about enjoyment [93], though effects of privacy may happen indirectly by altering utilitarian and hedonic attitudes toward domestic robots [94]. Real world findings in HRI are also suggestive that privacy concerns affect non-adoption [95].
Our research finds evidence that privacy concerns do not, or only weakly, affect domestic robot purchasing and use intentions among early technology adopters. Though early adopters preferred robots to detect their behavior without the inclusion of a camera, for informational privacy reasons, it is unclear whether this desire is strong enough to actually affect behavior, as many of them also acknowledged the benefits of its use. However, informational privacy concerns did inform their ideal designs more than concerns over physical privacy. Though they described physical privacy concerns (due to concerns over feeling watched), their designs were in direct conflict with this concern (possibly because their ‘privacy calculus’ placed higher weight on the expected benefits of the technology, along with their general proclivity to want to adopt new technology).
On the other hand, privacy concerns do appear to strongly affect purchasing and use intentions for those who are not early adopters of technology, along with this group’s desired designs. Informational privacy concerns led to participants’ unwillingness to adopt technology with a camera as well as most to eschew technology with eyes. Physical privacy concerns led to an unwillingness to adopt technology that had following behaviors (like Olly), a face and eyes, and that was intrusive and proactive.
Future work should serve to confirm these findings, particularly the difference in The Privacy Paradox, or the ‘privacy calculus’, as it relates to these two groups, along both of these dimensions of privacy. It is also clear that cameras on domestic robots invoke a more significant threat to privacy than does the recording of audio, and a corresponding reticence to use a robot with a camera, especially if those cameras are necessary for functioning (e.g., they cannot be routinely physically blocked like the camera on one’s computer). Therefore, one hurdle to the mass adoption of social home robots will likely be finding relevant solutions or alternatives. As most participants were positive about ‘low fidelity’ tracking, determining ways to effectively use sensors on consumer home robots instead of cameras is one possible solution.
5.4 Methodological Contribution of Holistic Product Design Cards
Research through design (RtD), a term introduced by Frayling, emphasizes the importance of designing the right thing, instead of simply designing something in the right way [96]. Though this view has flourished in the CHI community, it is still relatively absent from HRI research [61]. Luria et al. [61] calls for this approach to be incorporated into the HRI community, so that we shift from evaluating design success as task or function completion, and instead consider whether the right choice was made to create a robot at all.
Though there are several card decks meant for use in design [26, 97, 98], the Holistic Product Design Cards discussed in this paper, with its emphasis on the inclusion of commonplace and potentially competing technology, is useful for exploring whether a robot (or other interactive technology) should be designed at all. It is important to note that the exact content of these cards is customizable, rather than being a static set. The content of these cards should change based on the use case of evaluation and the technology under testing. Additionally, placing a cost on each card makes them useful in product design, where it is beneficial or desirable to evaluate potential marketplace success. Therefore, these also help combat overspecing or overdesigning a product. Overdesign is the act of designing products or services beyond the requirements of the consumer [99]. Said another way, product design should strive to include features or design elements that matter and which are seen as worth the corresponding cost to consumers. Overdesign has been considered problematic due to higher associated cost and higher technological complexity. This increased complexity can lead to difficulty using the technology, resulting in decreased user satisfaction [100]. Emotional attachment born from personal involvement in the design and development process is one reason this occurs [101]. While this is typically applied to designers and developers, it is an important fact to keep in mind as the HRI community turns increasingly toward participatory and co-design practices, where users become more actively involved in the design process.
Due to the equivalent design liking and willingness to use scores resulting from participants’ Unconstrained Designs and Price Constrained Designs, we find that methods that force prioritization of design elements can help with issues related to overdesign. This can therefore prove useful for designs meant for real-world contexts. The Holistic Product Design Cards, which include an associated price (aka selection penalty), are one such method. These cards also have the added advantage of displaying robots’ movement, a factor important in participants’ evaluations of the robots included in this research. In fact, displaying robots’ movements has been shown to lead to more accurate evaluations (of liking, intent to purchase, etc.) than static images [70]. Therefore, their use may be valuable when designing robots, regardless of whether marketplace success is of concern.
6 Limitations
Though our study provides valuable insights, we also note several limitations. First, we note that this work relies on participants’ self-reports of intent to purchase and WTP, instead of actual purchase. Intention to purchase does not always translate into buying behavior, and stated intention not to purchase may translate into actual buying behavior [102, 103]. Second, it is unclear how quickly preferences may change, as potential users become more familiar with advanced technology, prices decrease, and other competing technology is released, but recommendations are likely to reflect nearer-term preferences. Third, due to the paucity of minimalist robots on the market, our embodiment cards lacked a sufficient number and breadth of these options. However, our research suggests that these are likely to be the first to be successfully sold to mainstream consumers. Fourth, we note that this method is not the most suitable for radical product innovation, which typically relies on a design process independent from price. Fifth, while participants were asked to ignore numerical (pricing) information written on the cards, and seemed to be unaware of its purpose until explanations were provided for the purpose of creating the second, Price-Constrained Design, we note that there may have been potential for an unconscious bias based on this information. In future work, we recommend that two sets of Holistic Product Design Cards be created, one with pricing information and one without. Sixth, as prices of features may vary by company, product, or exact implementation, and this work does not include a survey of businesses to determine median implementation cost, it is possible that prices represent something more akin to a penalty for increasing complexity. However, we note that total prices of the whole product are consistent with current market prices. Pricing of cards should be reconsidered as necessary when utilizing them in the future, based on how quickly market prices of robots and common technologies change, as well as based on the exact technologies chosen for inclusion in the set. Lastly, while many of these design preferences seem to apply to domestic robots in general, and not habit change robots specifically, a similar exercise should be undertaken with other test cases, to determine use case specific differences.
7 Future Work
This research is exploratory, qualitative, and theory-producing, which is a necessary first step before more quantitative and theory-affirming work. Therefore, this research is meant to provide foundational knowledge to aid in the design and analysis of a larger-scale survey study. Future quantitative work will also look at the effects of demographic variables (e.g., gender, age, income), in addition to adopter category.
We also note that this research is meant to give guidance toward short-term product directions, and not precise product implementation. Information obtained from designs created by participants will result in the design and animation of several minimalist robots, which will be evaluated through interviews and surveys. Design elements such as quality of movement and CMF (color, material, finish) need to be further explored through later-stage design and marketing research. Additionally, while this work is being conducted within the United States, it is uncertain to what degree these results may apply internationally. Therefore, the conducting of similar research in other countries is encouraged, and is a future research direction to be explored.
8 Conclusion
This research sought to identify the design factors that affect people’s decision to purchase social robots for their homes. As a test case, we focused on technology for behavior and habit change. We found that those identifying as early adopters prefer domestic robots to be human-like in form and behavior. Specifically, they desire a robotic technology to be proactive, capable of automatic detection and verbal communication, multi-functional, multi-user, and mobile. They are also drawn to humanoid-type robots. However, they exhibit significant downgrading, especially to a more device-like form, due to price. Alternatively, we find that those in the mainstream prefer technology that is not human-like in form or behavior. They exhibit a fear of AI, a dislike of technological integration, a desire for manual over automatic tracking, value movement but not mobility, and have a slight preference for sounds as communication opposed to verbal communication. Both informational and physical privacy concerns and a desire for control have significant impacts on their designs and their comfortability with robots in their homes. Based on this data, we make recommendations for reconciling findings to design a product that may be able to ‘cross the chasm’ from early adopters to mainstream adoption. Through the utilization of Holistic Product Design Cards to assess ideal versus price-constrained designs, we found that we were able to increase purchasing intention by 100%, while average design liking and intention to use ratings remained constant.
Data Availability
The datasets generated during and/or analysed during the current study are available from the corresponding author on reasonable request.
Notes
We did not identify “Laggards” separately, as there were no systematic differences between those indicating a 1 or 2 on the Early Adopter question. The “Early Adopters” category does not make a distinction between Early Adopters and Innovators, and is therefore synonymous with Moore’s “Early Market” [40].
https://youtu.be/o-bKxAaFAuQ, until 2:58.
https://youtu.be/LYvpvz_bzmI, until 1:05.
https://www.youtube.com/watch?v=SraNMzbi_G4, until 1:41.
N refers to number of participants and n refers to number of instances.
References
Mann JA, MacDonald BA, Kuo I-H, Li X, Broadbent E (2015) People respond better to robots than computer tablets delivering healthcare instructions. Comput Hum Behav 43:112–117
Kiesler S, Powers A, Fussell SR, Torrey C (2008) Anthropomorphic interactions with a robot and robot-like agent. Soc Cognit 26(2):169–181
Bainbridge WA, Hart JW, Kim ES, Scassellati B (2011) The benefits of interactions with physically present robots over video-displayed agents. Int J Soc Robot 3(1):41–52
Randall N, Šabanović S, Milojević S, Gupta A (2021) Top of the class: mining product characteristics associated with crowdfunding success and failure of home robots. Int J Soc Robot 14:149–163
Voils CI, Gierisch JM, Yancy WS Jr, Sandelowski M, Smith R, Bolton J, Strauss JL (2014) Differentiating behavior initiation and maintenance: theoretical framework and proof of concept. Health Educ Behav 41(3):325–336
Williams DM, Lewis BA, Dunsiger S, Whiteley JA, Papandonatos GD, Napolitano MA, Bock BC, Ciccolo JT, Marcus BH (2008) Comparing psychosocial predictors of physical activity adoption and maintenance. Ann Behav Med 36(2):186–194
Kwasnicka D, Dombrowski SU, White M, Sniehotta F (2016) Theoretical explanations for maintenance of Behaviour change: a systematic review of Behaviour theories. Health Psychol Rev 10(3):277–296
Redland A, Stuifbergen A (1993) Strategies for maintenance of health-promoting behaviors. Nurs Clin North Am 28(2):427–442
Michie S, Abraham C, Whittington C, McAteer J, Gupta S (2009) Effective techniques in healthy eating and physical activity interventions: a meta-regression. Health Psychol 28(6):690
Heatherton T, Tice DM et al (1994) Losing control: how and why people fail at self-regulation. Academic Press, Inc., San Diego
Sniehotta FF, Schwarzer R, Scholz U, Schüz B (2005) Action planning and coping planning for long-term lifestyle change: theory and assessment. Eur J Soc Psychol 35(4):565–576
Gollwitzer PM, Sheeran P (2006) Implementation intentions and goal achievement: a meta-analysis of effects and processes. Adv Exp Soc Psychol 38:69–119
Lally P, Van Jaarsveld CH, Potts HW, Wardle J (2010) How are habits formed: modelling habit formation in the real world. Eur J Soc Psychol 40(6):998–1009
Duhigg C (2012) The power of habit: why we do what we do in life and business, vol 34. Random House, New York
Fogg BJ (2019) Tiny habits: the small changes that change everything. Eamon Dolan Books, ???
Chidambaram V, Chiang Y-H, Mutlu B (2012) Designing persuasive robots: how robots might persuade people using vocal and nonverbal cues. In: Proceedings of the 7th Annual ACM/IEEE international conference on human–robot interaction, pp 293–300
Li J (2015) The benefit of being physically present: a survey of experimental works comparing copresent robots, telepresent robots and virtual agents. Int J Hum Comput Stud 77:23–37
Kidd CD, Breazeal C (2008) Robots at home: Understanding long-term human-robot interaction. In: 2008 IEEE/RSJ international conference on intelligent robots and systems. IEEE, pp 3230–3235
Robinson NL, Connolly J, Hides L, Kavanagh DJ (2020) Social robots as treatment agents: pilot randomized controlled trial to deliver a behavior change intervention. Internet Interv 21:100320
Randall N, Joshi S, Liu X (2018) Health-e-eater: dinnertime companion robot and magic plate for improving eating habits in children from low-income families. In: Companion of the 2018 ACM/IEEE international conference on human–robot interaction, pp 361–362
Deshmukh A, Babu SK, Unnikrishnan R, Ramesh S, Anitha P, Bhavani RR (2019) Influencing hand-washing Behaviour with a social robot: HRI study with school children in rural India. In: 2019 28th IEEE international conference on robot and human interactive communication (RO-MAN), pp 1–6. IEEE
Lee HR, Sung J, Šabanović S, Han J (2012) Cultural design of domestic robots: A study of user expectations in korea and the united states. In: 2012 IEEE RO-MAN: the 21st IEEE international symposium on robot and human interactive communication. IEEE, pp 803–808
Sung J, Christensen HI, Grinter RE (2009) Sketching the future: Assessing user needs for domestic robots. In: RO-MAN 2009—the 18th IEEE international symposium on robot and human interactive communication. IEEE, pp 153–158
Ezer N, Fisk AD, Rogers WA (2009) Attitudinal and intentional acceptance of domestic robots by younger and older adults. In: International conference on universal access in human-computer interaction. Springer, pp 39–48
Scopelliti M, Giuliani MV, Fornara F (2005) Robots in a domestic setting: a psychological approach. Univ Access Inf Soc 4(2):146–155
Ray C, Mondada F, Siegwart R (2008) What do people expect from robots? In: 2008 IEEE/RSJ international conference on intelligent robots and systems. IEEE, pp 3816–3821
Dautenhahn K, Woods S, Kaouri C, Walters ML, Koay KL, Werry I (2005) What is a robot companion-friend, assistant or butler? In: 2005 IEEE/RSJ international conference on intelligent robots and systems. IEEE, pp 1192–1197
Phillips E, Ullman D, de Graaf MM, Malle BF (2017) What does a robot look like? A multi-site examination of user expectations about robot appearance. In: Proceedings of the human factors and ergonomics society annual meeting, vol 61. SAGE Publications Sage CA: Los Angeles, CA, pp 1215–1219
de Graaf MM, Allouch SB (2015) The evaluation of different roles for domestic social robots. In: 2015 24th IEEE international symposium on robot and human interactive communication (RO-MAN). IEEE, pp 676–681
Walters ML, Syrdal DS, Dautenhahn K, Te Boekhorst R, Koay KL (2008) Avoiding the uncanny valley: robot appearance, personality and consistency of behavior in an attention-seeking home scenario for a robot companion. Auton Robots 24(2):159–178
Dereshev D, Kirk D (2017) Form, function and etiquette-potential users’ perspectives on social domestic robots. Multimodal Technol Interact 1(2):12
Jones JL (2006) Robots at the tipping point: the road to iRobot Roomba. IEEE Robot Autom Mag 13(1):76–78
Kwak SS, Kim JS, Choi JJ (2017) The effects of organism-versus object-based robot design approaches on the consumer acceptance of domestic robots. Int J Soc Robot 9(3):359–377
Rogers EM (2010) Diffusion of innovations. Simon and Schuster, New York
Bass FM (1969) A new product growth for model consumer durables. Manag Sci 15(5):215–227
Mahajan V, Muller E, Bass FM (1995) Diffusion of new products: empirical generalizations and managerial uses. Market Sci 14(3_supplement):79–88
Dedehayir O, Ortt RJ, Riverola C, Miralles F (2020) Innovators and early adopters in the diffusion of innovations: a literature review. In: Digital Disruptive Innovation, pp 85–115
Robertson TS, Kennedy JN (1968) Prediction of consumer innovators: application of multiple discriminant analysis. J Market Res 5(1):64–69
Li S-CS, Huang W-C (2016) Lifestyles, innovation attributes, and teachers’ adoption of game-based learning: comparing non-adopters with early adopters, adopters and likely adopters in Taiwan. Comput Educ 96:29–41
Moore GA, McKenna R (1999) Crossing the chasm: marketing and selling disruptive products to
Coskun A, Kaner G, Bostan İ (2018) Is smart home a necessity or a fantasy for the mainstream user? A study on users’ expectations of smart household appliances. Int J Des 12(1):7–20
Jahanmir SF, Lages LF (2015) The lag-user method: using laggards as a source of innovative ideas. J Eng Technol Manag 37:65–77
Jahanmir SF, Lages LF (2016) The late-adopter scale: a measure of late adopters of technological innovations. J Bus Res 69(5):1701–1706
Abdullah-Al-Mamun MKR, Robel S (2014) A critical review of consumers’ sensitivity to price: managerial and theoretical issues. J Int Bus Econ 2(2):01–09
Martínez E, Polo Y (1996) Adopter categories in the acceptance process for consumer durables. J Product Brand Manag 5(3):34–47
Rogers Everett M (1995) Diffusion of innovations. New York, vol 12
Velinova S (2013) Characteristics, motivation and factors influencing tablet computer early adopters and early majority. Beagle J Stud Res Enterprise 1(1)
Slater SF, Mohr JJ (2006) Successful development and commercialization of technological innovation: insights based on strategy type. J Product Innovat Manag 23(1):26–33
Manross GG, Rogers E (2004) Closing the chasm. Strategy Research Institute, pp 1–14
Valente TW (1996) Social network thresholds in the diffusion of innovations. Soc Netw 18(1):69–89
Heckman JJ (1990) Selection bias and self-selection. In: Econometrics. Springer, New York, pp 201–224
Bethlehem J (2010) Selection bias in web surveys. Int Stat Rev 78(2):161–188
Goldsmith RE, Freiden JB, Eastman JK (1995) The generality/specificity issue in consumer innovativeness research. Technovation 15(10):601–612
McDonald H, Alpert F (2001) Using the Juster scale to predict adoption of an innovative product
Rodríguez-Brito MG, Ramírez-Díaz AJ, Ramos-Real FJ, Perez Y (2018) Psychosocial traits characterizing EV adopters’ profiles: the case of Tenerife (Canary Islands). Sustainability 10(6):2053
Phau I, Lo C-C (2004) Profiling fashion innovators: a study of self-concept, impulse buying and internet purchase intent. J Fash Market Manag Int J 8(4):399–411
Girardi P, Chiagouris L (2018) The digital marketplace: early adopters have changed. J Market Dev Compet 12(1):84–95
Van Westendorp PH, et al. (1976) NSS price sensitivity meter (PSM)—a new approach to study consumer perception of prices. In: Proceedings of the 29th ESOMAR congress, vol 139167
Lipovetsky S, Magnan S, Zanetti-Polzi A (2011) Pricing models in marketing research
Ceylana HH, Koseb B, Aydin M (2014) Value based pricing: a research on service sector using van westendorp price sensitivity scale. Procedia Soc Behav Sci 148:1–6
Luria M, Zimmerman J, Forlizzi J (2019) Championing research through design in HRI. arXiv:1908.07572
The Robot Design Game. https://robot-design.org/. Accessed 06 Aug 2013
Kim AS, Björling EA, Bhatia S, Li D (2019) Designing a collaborative virtual reality game for teen-robot interactions. In: Proceedings of the 18th ACM international conference on interaction design and children, pp 470–475
Pollmann K (2021) The modality card deck: co-creating multi-modal behavioral expressions for social robots with older adults. Multimodal Technol Interact 5(7):33
Singh N (2018) Talking machines: democratizing the design of voice-based agents for the home. PhD thesis, Massachusetts Institute of Technology
Golembewski M, Selby M (2010) Ideation decks: a card-based design ideation tool. In: Proceedings of the 8th ACM conference on designing interactive systems, pp 89–92
Lee HR (2017) Collaborative design for intelligent technologies. PhD thesis, Indiana University
Randall N, Šabanović S, Chang W (2018) Engaging older adults with depression as co-designers of assistive in-home robots. In: Proceedings of the 12th EAI international conference on pervasive computing technologies for healthcare, pp 304–309
Randall N, Bennett CC, Šabanović S, Nagata S, Eldridge L, Collins S, Piatt JA (2019) More than just friends: in-home use and design recommendations for sensing socially assistive robots (SARs) by older adults with depression. Paladyn J Behav Robot 10(1):237–255
Randall N, Sabanovic S (2023) A picture might be worth a thousand words, but it’s not always enough to evaluate robots. In: Proceedings of the 2023 ACM/IEEE international conference on human–robot interaction, pp 437–445
Nowell LS, Norris JM, White DE, Moules NJ (2017) Thematic analysis: striving to meet the trustworthiness criteria. Int J Qual Methods 16(1):1609406917733847
Ando H, Cousins R, Young C (2014) Achieving saturation in thematic analysis: development and refinement of a codebook. Compr Psychol 3:03
Guest G, Bunce A, Johnson L (2006) How many interviews are enough? An experiment with data saturation and variability. Field Methods 18(1):59–82
Hennink M, Kaiser BN (2022) Sample sizes for saturation in qualitative research: a systematic review of empirical tests. Soc Sci Med 292:114523
Weller SC, Vickers B, Bernard HR, Blackburn AM, Borgatti S, Gravlee CC, Johnson JC (2018) Open-ended interview questions and saturation. PLoS ONE 13(6):0198606
Marshall B, Cardon P, Poddar A, Fontenot R (2013) Does sample size matter in qualitative research? A review of qualitative interviews in is research. J Comput Inf Syst 54(1):11–22
de Graaf MM, Allouch SB, van Dijk JA (2016) Long-term evaluation of a social robot in real homes. Interact Stud 17(3):462–491
Fernaeus Y, Håkansson M, Jacobsson M, Ljungblad S (2010) How do you play with a robotic toy animal? A long-term study of Pleo. In: Proceedings of the 9th international conference on interaction design and children, pp 39–48
Fuchs C, Prandelli E, Schreier M (2010) The psychological effects of empowerment strategies on consumers’ product demand. J Market 74(1):65–79
Franke N, Schreier M, Kaiser U (2010) The “i designed it myself’’ effect in mass customization’’. Manag Sci 56(1):125–140
Burgoon JK (1982) Privacy and communication. Ann Int Commun Assoc 6(1):206–249
Leino-Kilpi H, Välimäki M, Dassen T, Gasull M, Lemonidou C, Scott A, Arndt M (2001) Privacy: a review of the literature. Int J Nurs Stud 38(6):663–671
Kokolakis S (2017) Privacy attitudes and privacy Behaviour: a review of current research on the privacy paradox phenomenon. Comput Secur 64:122–134
Gerber N, Gerber P, Volkamer M (2018) Explaining the privacy paradox: a systematic review of literature investigating privacy attitude and behavior. Comput Secur 77:226–261
Preibusch S (2013) Guide to measuring privacy concern: review of survey and observational instruments. Int J Hum Comput Stud 71(12):1133–1143
Dienlin T, Trepte S (2015) Is the privacy paradox a relic of the past? An in-depth analysis of privacy attitudes and privacy behaviors. Eur J Soc Psychol 45(3):285–297
Dinev T, Hart P (2006) An extended privacy calculus model for e-commerce transactions. Inf Syst Res 17(1):61–80
Barth S, De Jong MD (2017) The privacy paradox-investigating discrepancies between expressed privacy concerns and actual online behavior—a systematic literature review. Telemat Inform 34(7):1038–1058
Grossklags J, Acquisti A (2007) When 25 cents is too much: an experiment on willingness-to-sell and willingness-to-protect personal information. In: WEIS
Tsai JY, Egelman S, Cranor L, Acquisti A (2011) The effect of online privacy information on purchasing behavior: an experimental study. Inf Syst Res 22(2):254–268
Lutz C, Tamó-Larrieux A (2020) The robot privacy paradox: understanding how privacy concerns shape intentions to use social robots. Hum Mach Commun 1:87–111
Lutz C, Tamò-Larrieux A (2021) Do privacy concerns about social robots affect use intentions? Evidence from an experimental vignette study. Front Robot AI 8:63
de Graaf MM, Ben Allouch S, Van Dijk JA (2019) Why would i use this in my home? A model of domestic social robot acceptance. Hum Comput Interact 34(2):115–173
Chatterjee S, Chaudhuri R, Vrontis D (2021) Usage intention of social robots for domestic purpose: from security, privacy, and legal perspectives. Inf Syst Front. https://doi.org/10.1007/s10796-021-10197-7
De Graaf M, Allouch SB, Van Diik J (2017) Why do they refuse to use my robot?: Reasons for non-use derived from a long-term home study. In: 2017 12th ACM/IEEE international conference on human–robot interaction (HRI). IEEE, pp. 224–233
Frayling C (1993) Research in art and design, vol 1. Royal College of Art London, London
Wölfel C, Merritt T (2013) Method card design dimensions: a survey of card-based design tools. In: IFIP conference on human–computer interaction. Springer, pp 479–486
Aarts T, Gabrielaitis LK, De Jong LC, Noortman R, Van Zoelen EM, Kotea S, Cazacu S, Lock LL, Markopoulos P (2020) Design card sets: systematic literature survey and card sorting study. In: Proceedings of the 2020 ACM designing interactive systems conference, pp 419–428
Ronen B, Pass S (2008) Focused operations management: achieving more with existing resources. Wiley, New York
Belvedere V, Grando A, Ronen B (2013) Cognitive biases, heuristics, and overdesign: an investigation on the unconscious mistakes of industrial designers and on their effects on product offering. In: Behavioral issues in operations management. Springer, New York, pp 125–139
Shmueli O, Pliskin N, Fink L (2015) Explaining over-requirement in software development projects: an experimental investigation of behavioral effects. Int J Project Manag 33(2):380–394
Namias J (1959) Intentions to purchase compared with actual purchases of household durables. J Market 24(1):26–30
Bemmaor AC (1995) Predicting behavior from intention-to-buy measures: the parametric case. J Market Res 32(2):176–191
Funding
This study was funded by a grant through Indiana University’s Social Science Research Commons.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Randall, N., Šabanović, S. Designing Robots for Marketplace Success: A Case Study with Technology for Behavior and Habit Change. Int J of Soc Robotics 16, 461–487 (2024). https://doi.org/10.1007/s12369-023-01093-y
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12369-023-01093-y