
Abstract
Employing the KP reduction approach, the primary goal of this research work is to investigate the soliton and rational solutions of the \((3+1)\)-dimensional nonlocal Mel’nikov equation with non-zero background. The solutions presented are all \(N\times N\) Gram determinants. In contrast to the previous exact solutions of the nonlocal model obtained by the KP reduction method, we introduce two types of parameter constraints into the \(\tau \) function. This leads to the appearance of rational solutions and soliton (breather) solutions against a background of periodic wave. In particular, the soliton types we obtained are dark soliton, antidark soliton, breather, periodic wave and degenerate soliton. Furthermore, it has been discovered that lumps can appear in odd or even numbers in two backgrounds, which is a novel finding. The dynamic behavior of all solutions has been comprehensively analyzed.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction
Nonlinear mathematical physics equations play a significant role in real-life applications. The nonlinear Schrödinger equations, in particular, are widely applied across various fields, including nonlinear optics, quantum mechanics, fluid mechanics, and other areas of nonlinear dynamics [1,2,3,4]. Algorithms based on solitons offer a promising avenue for exploring solutions to nonlinear practical problems [1, 5,6,7,8,9]. In the past decades, the studies of nonlocal integrable equations in nonlinear mathematical physics have attracted a lot of attention. Certain soliton equations demonstrate a fascinating characteristic whereby the evolution of their solutions is not simply affected by time and spatial coordinates, but is also influenced by nonlocal interactions. This important concept derives from the parity-time symmetry in quantum mechanics, which was first proposed by Bender and Boettcher [10]. As a result of the broad utilization of parity-time symmetry in multiple domains, it is naturally combined with the integrable system. Since then, many types of nonlocal integrable equations have also been derived [11,12,13,14,15]. One of the most typical examples is the nonlocal nonlinear Schrödinger equation [16]
Fokas developed high-dimensional variants of the equation above and suggested the nonlocal DS equation [17,18,19]. Subsequently, some new nonlocal multidimensional equations were investigated [20, 21].
Research on nonlocal integrable equations is meaningful because their solutions possess intriguing characteristics, such as the phenomenon where solutions blow up at a finite time and the coexistence of kink and soliton solutions [22, 23]. These features enrich the solutions of nonlinear evolution equations. Various established methods exist for solving integrable equations, including the Darboux transformation approach [24], the inverse scattering transform method [25], and the KP reduction method [26,27,28]. Among these techniques, the KP reduction method is particularly advantageous, as it can produce straightforward exact solutions.
The main idea of the KP reduction method is to first obtain the bilinear forms of the nonlinear evolution system. Then, it involves finding similar bilinear equations within the KP hierarchy and connecting these two sets of equations through appropriate variable transformations. Finally, the exact solutions of the Gram determinant are derived. Compared with other methods, the KP reduction method can directly bypass the spectral problem of nonlinear evolution equations, which is more concise and effective for gaining higher-order (semi-)rational solutions [29]. However, the finiteness of the bilinear equations within the KP hierarchy means that not all variable substitutions are successful in reducing the original bilinear equations.
As an integrable extension of the KP equation, the Mel’nikov equation introduces an addition of the complex field [30,31,32,33]:
in which \(\varphi \) indicates the complex short wave, u represents a real long wave, and \(\lambda \) is a real parameter. In many physical domains, soliton equations with self-consistent sources represent a crucial class of models. Wave interactions on the x, y plane were initially investigated by Mel’nikov. His groundbreaking research revealed the emergence of the KP equation with self-consistent sources as an integrable extension of soliton equations [34,35,36]. Inspired by this, Ma et al. considered a \((3+1)\)-dimensional Mel’nikov equation [37]
In fact, the Eq. (3) is a high-dimensional generalization of the KP equation with self-consistent sources.
In this present work, we propose the \((3+1)\)-dimensional nonlocal Mel’nikov equation in the form
The nonlocal Eq. (4) is derived by employing the reduction \(\varphi ^*(x,y,z,t)=\varphi (x,-y,-z,t)\) in the \((3+1)\)-dimensional local Eq. (3). In the case of conjugate reduction \(\varphi (x,y,z,t)=\varphi ^*(-x,y,z,-t),\) Cao and his group have studied the soliton and rational solutions against a constant background [38]. The key contributions of our work are as follows:
(i) Multi-soliton and rational solutions on a periodic wave and a constant background are constructed. This result is mainly achieved by imposing two parameter restrictions on the solution of the \(\tau \) function in the KP hierarchy.
(ii) The breather of the \((3+1)\)-dimensional nonlocal Mel’nikov equation is obtained for the first time. In contrast to Ref. [38], we add the case of degenerate antidark-soliton and degenerate dark-soliton.
(iii) Compared with previous work, when N is even, some results are similar to those in Refs. [39,40,41]. However, for odd values of N, both soliton and rational solutions coexist in two different backgrounds. In contrast to the findings in Refs. [39, 40], where lumps always appeared in pairs, this paper demonstrates that an odd or even number of lumps can emerge.
The following summarizes the general organization of this work. In Sect. 2, we establish the framework for constructing soliton solutions and provide the accompanying proofs. Sections 3 and 4 delve into the analysis of the dynamic behaviors exhibited by soliton solutions. In Sect. 5, the rational solutions within two kinds of backgrounds are generated. Finally, we conclude with a summary of our findings in Sect. 6.
2 Soliton Solutions in Two Different Backgrounds
For the purpose of constructing soliton solutions, through introducing bilinear transformation
under the condition
where g represents a complex-valued function and f is real, then Eq. (4) could be cast into the bilinear equations
in which D represents the Hirota operator [42].
Theorem 2.1
The nonlocal Eq. (4) admits soliton solutions
where
and the components of the matrix include
with
Here N defines an integer, and \(p_i\), \(q_k\) represent random complex constants.
Further, there are two parameter conditions to consider:
(I) Assume N is even, i.e. \(N=2L\), by choosing
in which \(i,k=1,2,...,L\).
(II) Assume N is odd, i.e. \(N=2L+1\), by considering
where \(i=1,2,...,2L+1\).
Proposition 2.1
In Theorem (2.1), by taking \(\mu _{ik}=\sigma _{i,k}\mu _i\), we obtain the nonsingular solutions (8) under the condition
where \(\sigma _{i,k}\) is the Kronecker delta.
To get soliton solutions with a nonzero background, we take the parameter restriction that is distinct from the one given in Theorem (2.1).
Theorem 2.2
The nonlocal Eq. (4) admit soliton solutions
where
with the components of the matrix have the following forms
with
Here, \(\mu _{i}\), \(p_i\), \(q_k\) are arbitrary complex constants and require
2.1 Evidence Supporting Theorems (2.1) and (2.2)
Lemma 2.1
The bilinear Eq. (7) are transformed from the bilinear forms in KP hierarchy [43]
which possess a Gram determinant solution
Here, \(M_{i,k}^{(n)}\) is defined as follows:
with
Notably, set \(x_{-1}=\lambda t\), \(x_1=x\), \(x_2=-iz-2iy\), \(x_3=-4t\), then Eq. (16) can be cast into Eq. (7).
Proof of Theorem (2.1). We rewrite \(\tau ^{(n)}\) as \(e^{\xi _i+\psi _k}\widetilde{M_{i,k}^{(n)}}\) and impose restrictions on the parameters. Based on (10) and (11), it is possible to derive
According to the above results, we can obtain the following relations:
In summary, we yield \(\tau ^{(n)}(x,y,z,t)=\tau ^{-(n)}(x,-y,-z,t)\) whether N is odd or even, and when \(n=0\), the condition (6) holds. Regarding the proof of Proposition (2.1), we omit it here as it is similar to that in Ref. [44].
Proof of Theorem (2.2). Based on the condition (15), when \(i=k\), then we know
furthermore, the following result could be deduced
For another case, where \(i\ne k\), we get
In conclusion, the following condition holds for any integer N
this completes the proof.
3 Dynamical Behavior of Multi-solitons on a Constant Background
By setting \(N=1\), one-soliton solution is obtained
with
Since \(p_1=q_1\), the solution is independent of y, z. We construct two types of behaviors based on the situations in which \(p_1\) is a real number and a pure imaginary number (see Fig. 1):
When \(p_1\) assumes a real value, the solutions for the \(|\varphi |\) component include both dark solitons, characterized by a real \(\mu _{11}\), and antidark solitons, characterized by a complex \(\mu _{11}\). Conversely, when \(p_1\) is an pure imaginary number, the \(|\varphi |\) and |u| components display periodic wave solutions.

Three types of one-soliton solutions when \(\lambda =1\): a Antidark soliton for \(\varphi \) with \(p_1=1, \mu _{11}=-1+i\). b Dark soliton for \(\varphi \) with \(p_1=1, \mu _{11}=10\). c Periodic wave solution for \(\varphi \) with \(p_1=i, \mu _{11}=10\)
The exact solution (8) for the two solitons can be obtained by taking the form
with
Here, we mainly consider the asymptotic properties of \(\varphi \). Within the constraints of Proposition (2.1), we take \(p_1=q_1^{*}=e^{i\theta }\) to prevent singularities. Consequently, f and g are represented as
Next, to delve deeper into the collision characteristics exhibited by the two solitons, we make asymptotic analysis [45,46,47,48] of the above solution:
(I) Before collision (\(t\rightarrow -\infty \))
Soliton 1 (\(-\xi _2-\psi _2\rightarrow -\infty , -\xi _1-\psi _1\approx 0\)):
Soliton 2 (\(-\xi _2-\psi _2\rightarrow 0, -\xi _1-\psi _1\approx +\infty \)):
(I) After collision (\(t\rightarrow +\infty \))
Soliton 1 (\(-\xi _2-\psi _2\rightarrow +\infty , -\xi _1-\psi _1\approx 0\)):
Soliton 2 (\(-\xi _2-\psi _2\rightarrow 0, -\xi _1-\psi _1\approx -\infty \)):
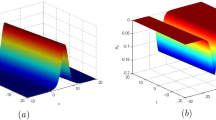
When \(\mu _{12}=0\), an elastic collision will occur between the two solitons. At this point, their amplitudes satisfy \(|\varphi _i^{+}(-\xi _i-\psi _i)|=\sin ^2\theta |\varphi _i^{-}(-\xi _i-\psi _i)|, i=1,2\). By taking different parameters, several types of two-soliton solutions are derived. The images of these specific exact solutions are depicted in the (x, z) plane in Fig. 2 and in the (x, t) plane in Fig. 3, respectively. It is interesting to note that the two solitons interact with each other within the (x, z) plane, yet they remain parallel to one another within the (x, t) plane.

Five different types of two-soliton solutions in the (x, z) plane with \(\lambda =1, t=0, p_1=1+i\): a \(\mu _{11}=i\). b \(\mu _{11}=-\frac{1}{2}+\frac{i}{3}\). c \(\mu _{11}=2\). d \(\mu _{11}=1+i\). e \(\mu _{11}=-1+i\)

Five different types of two-soliton in the (x, t) plane with \(\lambda =1, t=1, p_1=1+i\): a \(\mu _{11}=i\). b \(\mu _{11}=-\frac{1}{2}+\frac{i}{3}\). c \(\mu _{11}=2\). d \(\mu _{11}=1+i\). e \(\mu _{11}=-1+i\)
In addition, to obtain the two-soliton solutions on the periodic background, one can consider taking \(N=3\) and letting \(p_3\) be a pure imaginary number (see Fig. 4).

Two-soliton solutions on a periodic wave background with \(\lambda =1, t=0, p_1=1+i, p_3=2i\): a \(\mu _{11}=i, \mu _{33}=2i\). b \(\mu _{11}=2, \mu _{33}=2\). c \(\mu _{11}=-\frac{1}{2}+\frac{i}{3}, \mu _{33}=2i\). d \(\mu _{11}=1+i, \mu _{33}=2i\). e \(\mu _{11}=-1+i, \mu _{33}=2i\)
For getting three-soliton solutions, we choose \(N=3\) and rewrite \(\mu _{ij}=\sigma _{ij}\mu _i\). Figure 5 shows four different kinds of three-soliton solutions.

Four kinds of three-soliton in the (x, z) plane with \(\lambda =1, t=0, p_1=1+i, p_3=2\): a \(\mu _{1}=2, \lambda _{3}=2\). b \(\mu _{1}=2i, \mu _{3}=2\). c \(\mu _{1}=-\frac{1}{2}+\frac{i}{3}, \mu _{3}=2\). d \(\mu _{1}=-\frac{1}{2}+\frac{i}{4}, \mu _{3}=-\frac{1}{2}+i\)
4 Dynamical Behavior of Multi-solitons and Breather on a Periodic Background
Different from Theorem (2.1), the dynamic behaviors of soliton solutions in Theorem (2.2) will be analyzed here. According to the parameter selection in (15), we know
the above condition shows that the solutions are independent of y, z. By dividing the real and imaginary parts of p, various soliton solutions can be obtained.
For the one-soliton solutions, we get the same figure as shown in Fig. 1. When \(N=2\), the solutions of Eq. (4) are
where
When \(p_1\), \(p_2\) are real numbers, the constant background yields the two-soliton solutions. Next, if we take \(p_1\) to be a real number and let \(p_2\) be purely imaginary, we derive one-soliton solutions on a periodic wave background. By comparing these two-soliton solutions with those obtained in Theorem (2.1), the solutions presented here are depicted on the (x, t) plane. Figure 6 displays three kinds of two-soliton and two kinds of one-soliton.

Two-soliton within the constant background with \(\lambda =1, t=1, p_1=1, p_2=2\): a \(\mu _{1}=1, \mu _{2}=1\). b \(\mu _{1}=-1+i, \mu _{2}=1\). c \(\mu _{1}=-1+i, \mu _{2}=-1+i\). One soliton within the periodic wave background with \(\lambda =1, p_1=1, p_2=3i\): d \(\mu _{1}=-1+i, \mu _{2}=10\). e \(\mu _{1}=2, \mu _{2}=10\)
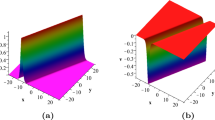
For \(N\ge 3\), the corresponding multi-soliton solutions on both constant and periodic backgrounds can be obtained. As shown in Fig. 7, there are three different types of two-soliton on the periodic wave background and three different forms of three-soliton on the constant background.

Three-soliton solutions on the constant background with \(\lambda =1, t=1, p_1=1, p_2=\frac{1}{2}, p_3=3\): a \(\mu _{1}=-1+i, \mu _{2}=-1+i, \mu _3=1\). b \(\mu _{1}=1, \mu _{2}=1, \mu _3=1\). c \(\mu _{1}=-1+i, \mu _{2}=-1+i, \mu _3=-1+i\). Two-soliton solutions on the periodic wave background with \(\lambda =1, p_1=1, p_2=3, p_3=2i\): d \(\mu _{1}=1, \mu _{2}=1, \mu _3=6\). e \(\mu _{1}=-1+i, \mu _{2}=1, \mu _3=6\). (f)\(\mu _{1}=-1+i, \mu _{2}=-1+i, \mu _3=6\)
In what follows, when \(p_1\), \(p_2\) are imaginary numbers at the same time, the line breather solutions would be yielded. Figure 8 illustrates breather solutions on two backgrounds, respectively.

Breather in the constant background with \(\lambda =1, p_1=\frac{i}{10}, p_2=\frac{2i}{5}\): a \(\mu _{1}=1, \mu _{2}=2\). Breather within the periodic wave background with \(\lambda =1, p_1=\frac{i}{10}, p_2=\frac{3i}{5}, p_3=\frac{3i}{2}\): b \(\mu _{1}=1, \mu _{2}=2, \mu _3=1\)
5 Rational Solutions of the \((3+1)\)-dimensional Nonlocal Mel’nikov Equation
This part will finish discussing the evidence and create rational solutions for Eq. (4). First, we select the matrix elements in the \(\tau \) function as
with differential operators \(A_s\) and \(B_j\) denote
Then, after substitution calculation, \(m_{sj}^{(n)}\) can be rewritten as
where
and \(\sigma (s,j)\) is the Kronecker delta, \(c_{sk}\), \(d_{jl}\), \(\mu \), \(p_i\), \(q_k\) are arbitrary complex constants.
Lemma 5.1
On the basis of Theorem (2.1), when N is even, take
and when N is odd, take
at this time, \(\tau \) function satisfies \(\tau _n(x,-y,-z,t)=\tau _{-n}(x,y,z,t).\)
Lemma 5.2
Whether N is odd or even, based on Theorem (2.2), add the condition
still leads to the establishment of \(\tau _n(x,-y,-z,t)=\tau _{-n}(x,y,z,t)\).
Proof
Rewrite \(m_{sj}^{(n)}\) as \(e^{\xi _s+\psi _j}\widetilde{M_{sj}^{(n)}}\), where \(\widetilde{M_{sj}^{(n)}}\) stands for
with
According to the Eqs. (10), (32)–(33), it is easy to find
then we have
Furthermore, based on the previous proof process for (19), one can deduce that \(\tau _n(x,-y,-z,t)=\tau _{-n}(x,y,z,t).\)
When \(N=2L+1\), based on the above conditions (11), (34), we know that \(\xi _{2L+1}'(x,-y,-z,t)=\psi _{2L+1}'(x,y,z,t).\) Then, the conclusion of \(\tau _n(x,-y,-z,t)=\tau _{-n}(x,y,z,t)\) is completed. We disregard Lemma (5.2)’s evidence because it is identical to Lemma (5.1). \(\square \)
5.1 Two Backgrounds with Rational Solutions
In the case of \(N=1\) and \(p_1=q_1\), we have
then \((3+1)\)-dimensional nonlocal Mel’nikov equation has one-lump solution \(\varphi =\frac{g}{f}\), as shown in Fig. 9. The bright lump is located in the (x, z) plane and also present in the (x, y) plane.

One-lump on the constant background with \(\lambda =1, t=0, p_1=1, a_{11}=0, n_0=1\)
When \(N=2\), under \(p_2=q_1, q_2=p_1,q_1=p_1^*\), we can conclude three different kinds of lump solutions including bright lump (\(p_{1R}^2>3p_{1I}^2\)), bi-peak lump (\(\frac{1}{3}p_{1R}^2\le p_{1I}^2\le 3p_{1R}^2\)) and dark lump (\(p_{1I}^2>3p_{1R}^2\)). Figure 10 illustrates the existence of the lump and W-type soliton in distinct planes.

Rational solutions within a constant background to the Eq. (4) with \(\lambda =1, a_{11}=0, t=0.5\): a \(p_1=3+i\). b \(p_1=1+i\). c \(p_1=1+2i\). d \(p_1=2+i\)
For the rational solutions within another background, we consider \(N=2\), then one-lump and M-type soliton in different planes are generated (see Fig. 11).

Rational solutions to the Eq. (4) with \(\lambda =1, t=1, a_{11}=0, p_1=\frac{1}{2}, p_2=i, c_2=1+3i\). a One-lump on the periodic wave background when \(y=0\). b–c M-type soliton when \(x=0\)
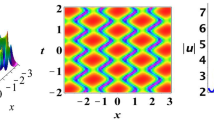
When \(N=3, n_1=n_2=1, p_3, q_3\) are purely imaginary values, dark-lump and bi-model lump are obtained (see Fig. 12).

Rational solutions to the Eq. (4) on the periodic wave background with \(\lambda =1, t=0.5, a_{11}=0, p_2=i, p_3=2i, c_3=8+8i\). a Dark-lump when \(p_1=1+i\). b Bi-model lump when \(p_1=1+2i\)
6 Conclusion
By utilizing the KP reduction method, the soliton solutions and rational solutions of the \((3+1)\)-dimensional nonlocal Mel’nikov equation in the constant and periodic wave background are studied. Through the imposition of two parameter constraints on the \(\tau \) function, we can derive soliton solutions on both the constant background and the periodic wave background. These soliton patterns encompass various types, including anti-dark solitons, dark solitons, periodic wave solutions, and degenerate solitons. Notably, our study introduces breather of the \((3+1)\)-dimensional nonlocal Mel’nikov equation for the first time, representing a novel discovery.
In addition, we take another form of \(\tau \) function to get the rational solutions, which contains lump and M(W)-type soliton. Unlike the case described in Ref. [38, 39], where lumps appear in pairs, the lumps presented here can be either odd or even. This demonstrates that the dynamic behavior of the nonlocal model in partial reverse-space is more richer. These new discoveries greatly advance our comprehension of nonlocal equations and warrant further investigation into these intriguing physical phenomena.
Data availability
No datasets were generated or analysed during the current study.
References
Rizvi, S.T.R., Seadawy, A.R., Ahmed, S., Younis, M., Ali, K.: Study of multiple lump and rogue waves to the generalized unstable space time fractional nonlinear Schrödinger equation. Chaos Soliton Fract. 151, 111251 (2021)
Ma, Y., Li, B.: Interaction behaviors between solitons, breathers and their hybrid forms for a short pulse equation. Qual. Theory. Dyn. Syst. 22, 146 (2023)
Li, B., Ma, Y.: Higher-order breathers and breather interactions for the AB system in fluids. Eur. Phys. J. Plus 138, 475 (2023)
Ma, Y., Li, B.: Higher-order hybrid rogue wave and breather interaction dynamics for the AB system in two-layer fluids. Math. Comput. Simul. 221, 489–502 (2024)
Seadawy, A.R., Rizvi, S.T.R., Ali, I., Younis, M., Ali, K., Makhlouf, M.M., Althobaiti, A.: Conservation laws, optical molecules, modulation instability and Painlev\(\acute{e}\) analysis for the Chen–Lee–Liu model. Opt. Quant. Electron. 53, 172 (2021)
Seadawy, A.R., Arshad, M., Lu, D.: The weakly nonlinear wave propagation theory for the Kelvin-Helmholtz instability in magnetohydrodynamics flows. Chaos Soliton Fract. 139, 110141 (2020)
Iqbal, M., Seadawy, A.R., Lu, D.: Applications of nonlinear longitudinal wave equation in a magneto-electro-elastic circular rod and new solitary wave solutions. Mod. Phys. Let. B 33(18), 1950210 (2019)
Seadawy, A.R., Lu, D., Iqbal, M.: Application of mathematical methods on the system of dynamical equations for the ion sound and Langmuir waves. Pramana-J Phys 93, 10 (2019)
Seadawy, A.R.: Stability analysis for Zakharov–Kuznetsov equation of weakly nonlinear ion-acoustic waves in a plasma. Comput. Math. Appl. 67(1) (2014)
Bender, C.M., Boettcher, S.: Real spectra in non-Hermitian Hamiltonians having \(PT\) symmetry. Phys. Rev. Lett. 80, 5243–5246 (1998)
Ablowitz, M.J., Musslimani, Z.H.: Inverse scattering transform for the integrable nonlocal nonlinear Schrödinger equation. Nonlinearity 29, 915–46 (2016)
Feng, B., Luo, X., Ablowitz, M.J., Musslimani, Z.H.: General soliton solution to a nonlocal nonlinear Schrödinger equation with zero and nonzero boundary conditions. Nonlinearity 31, 5385–5409 (2018)
Ablowitz, M.J., Musslimani, Z.H.: Integrable space-time shifted nonlocal nonlinear equations. Phys. Lett. A 409, 127516 (2021)
Yang, J.: General \(N\)-solitons and their dynamics in several nonlocal nonlinear Schrödinger equations. Phys. Lett. A 383, 328–337 (2019)
Ye, R., Zhang, Y.: General soliton solutions to a reverse-time nonlocal nonlinear Schrödinger equation. Stud. Appl. Math. 145, 197–216 (2020)
Ablowitz, M.J., Musslimani, M.J.: Integrable nonlocal nonlinear Schrödinger equation. Phys. Rev. Lett. 110, 064105 (2013)
Fokas, A.S.: Integrable multidimensional versions of the nonlocal nonlinear Schrödinger equation. Nonlinearity 29, 319 (2016)
Rao, J., Cheng, Y., He, J.: Rational and semirational solutions of the nonlocal Davey–Stewartson equations. Stud. Appl. Math. 139, 568–598 (2017)
Zhou, Z.: Darboux transformations and global explicit solutions for nonlocal Davey–Stewartson I equation. Stud. Appl. Math. 141, 186–204 (2018)
Peng, W., Tian, S., Zhang, T., Fang, Y.: Rational and semi-rational solutions of a nonlocal (2+1)-dimensional nonlinear Schrödinger equation. Math. Methods Appl. Sci. 42, 6865–6877 (2019)
Liu, W., Li, L.: General soliton solutions to a (2+1)-dimensional nonlocal nonlinear Schrödinger equation with zero and nonzero boundary conditions. Nonlinear Dyn. 93, 721–731 (2018)
Shi, C., Fu, H., Wu, C.: Soliton solutions to the reverse-time nonlocal Davey–Stewartson III equation. Wave Motion 104, 102744 (2021)
Yang, B., Yang, J.: Transformations between nonlocal and local integrable equations. Stud. Appl. Math. 140, 178–201 (2018)
Matveev, V.B., Salle, M.A.: Darboux Transformation and Solitons. Springer, Berlin (1991)
Ablowitz, M.J., Clarkson, P.A.: Solitons. Nonlinear Evolution Equations and Inverse Scattering. Cambridge University Press, Cambridge (1991)
Ohta, Y., Yang, J.: Rogue waves in the Davey–Stewartson I equation. Phys. Rev. E 86(3), 036604 (2012)
Ohta, Y., Wang, D., Yang, J.: General \(N\)-dark-dark solitons in the coupled nonlinear Schrödinger equations. Stud. Appl. Math. 127, 345–371 (2011)
Ohta, Y., Yang, J.: Dynamics of rogue waves in the Davey–Stewartson II equation. J. Phys. A: Math. Theor. 46, 105202 (2013)
Sheng, H.H., Yu, G.F.: Solitons, breathers and rational solutions for a \((2+1)\)-dimensional dispersive long wave system. Physica D 432, 133140 (2022)
Mel’nikov, V.K.: A direct method for deriving a multi-soliton solution for the problem of interaction of waves on the \(x, y\) plane. Commum. Math. Phys. 112, 639–652 (1987)
Sun, B., Lian, Z.: Rogue waves in the multicomponent Mel’nikov system and multicomponent Schrödinger–Boussinesq system. Pramana-J Phys 90, 23 (2018)
Sun, B., Wazwaz, A.M.: Interaction of lumps and dark solitons in the Mel’nikov equation. Nonlinear Dyn. 92, 2049–2059 (2018)
Hase, Y., Hirota, R., Ohta, Y., Satsuma, J.: Soliton solutions to the Mel’nikov equations. J. Phys. Soc. Jpn. 58, 2713–2720 (1989)
Zhang, Y., Sun, Y., Xiang, W.: The rogue waves of the KP equation with self-consistent sources. Appl. Math. Comput. 263, 204–213 (2015)
Deng, S.F., Chen, D.Y., Zhang, D.J.: The multisoliton solutions of the KP equation with self-consistent sources. J. Phys. Soc. Jpn. 72, 2184–2192 (2003)
Chvartatskyi, O., Dimakis, A., Müller-Hoissen, F.: Self-consistent sources for integrable equations via deformations of binary Darboux transformations. Lett. Math. Phys. 106, 1139–1179 (2016)
Yong, X., Li, X., Huang, Y., Ma, W., Liu, Y.: Rational solutions and lump solutions to the \((3+1)\)-dimensional Mel’nikov equation. Mod. Phys. Lett. B 34, 2050033 (2020)
Cao, Y., Tian, H., Wazwaz, A., Liu, J., Zhang, Z.: Interaction of wave structure in the PT-symmetric \((3+1)\)-dimensional nonlocal Mel’nikov equation and their applications. Z. Angew. Math. Phys. 74(2), 49 (2023)
Rao, J., He, J., Mihalache, D., Cheng, Y.: Dynamics of lump-soliton solutions to the PT-symmetric nonlocal Fokas system. Wave Motion 101, 102685 (2021)
Liu, Y., Li, B.: Dynamics of solitons and breathers on a periodic waves background in the nonlocal Mel’nikov equation. Nonlinear Dyn. 100, 3717–3731 (2020)
Liu, W., Zheng, X., Li, X.: Bright and dark soliton solutions to the partial reverse space-time nonlocal Mel’nikov equation. Nonlinear Dyn. 94(3), 2177–2189 (2018)
Hirota, R.: The Direct Method in Soliton Theory. Cambridge University Press, Cambridge (2004)
Jimbo, M., Miwa, T.: Solitons and infinite-dimensional Lie algebras. Publ. Res. Inst. Math. Sci. 19, 943–1001 (1983)
Fu, H., Lu, W., Guo, J., Wu, C.: General soliton and (semi-)rational solutions of the partial reverse space \(y\)-non-local Mel’nikov equation with non-zero boundary cinditions. R. Soc. Open Sci. 8, 201910 (2021)
Lin, Z., Wen, X.: Hodograph transformation, various exact solutions and dynamical analysis for the complex Wadati–Konno–Ichikawa-II equation. Physica D 451, 133770 (2023)
Liu, X., Wen, X.: A discrete KdV equation hierarchy: continuous limit, diverse exact solutions and their asymptotic state analysis. Commun. Theor. Phys. 74, 065001 (2022)
Liu, X., Wen, X., Zhang, T.: Magnetic soliton and breather interactions for the higher-order Heisenberg ferromagnetic equation via the iterative \(N\)-fold Darboux transformation. Phys. Scr. 99, 045231 (2024)
Liu, X., Wen, X.: Diverse soliton solutions and dynamical analysis of the discrete coupled mKdV equation with \(4\times 4\) Lax pair. Chin. Phys. B 32, 120203 (2023)
Acknowledgements
This work was supported by the National Natural Science Foundation of China (Grant Nos. 11371326, 11975145 and 12271488).
Author information
Authors and Affiliations
Contributions
X.Y. write the main manuscript text , Y.Z. reviewed the manuscript and all authors reviewed the manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Yang, X., Zhang, Y. & Li, W. Dynamics of General Soliton and Rational Solutions in the \((3+1)\)-Dimensional Nonlocal Mel’nikov Equation with Non-zero Background. Qual. Theory Dyn. Syst. 23, 211 (2024). https://doi.org/10.1007/s12346-024-01068-y
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s12346-024-01068-y