
Abstract
In this paper, we investigate a system of two differential equations of fractional order for the fear effect in prey-predator interactions, in which the density of predators controls the mortality pace of the prey population. The non-integer order differential equation is interpreted in terms of the Caputo derivative, and the development of the non-integer order scheme is described in terms of the influence of memory on population increase. The primary goal of existing research is to explore how the changing aspects of the current scheme are impacted by various types of parameters, including time delay, fear effect, and fractional order. The solutions’ positivity, existence-uniqueness, and boundedness are established with precise mathematical conclusions. The requirements necessary for the local asymptotic stability of different equilibrium points and the global stability of coexistence equilibrium are established. Hopf bifurcation occurs in the system at various delay times. The model’s fractional-order derivatives enhance the model behaviours and provide stability findings for the solutions. We have observed that fractional order plays an important role in population dynamics. Also, Hopf bifurcation for the proposed system have been observed for certain values of order of derivatives. Thus, the stability conditions of the equilibrium points may be changed by changing the order of the derivatives without changing other parametric values. Finally, a numerical simulation is run to verify our conclusions.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Nonlinear dynamics established in numerous species that associate across different period frames is an emerging field of exploration in light of its enormous significance on the long-term existence of many species. Mathematical modelling is an efficient technique for investigating to project the continuous existence of distinct species based on the known ecological relations between the individuals of the species at different trophic levels. To gain a greater insight into the changing aspects of the prey-predator scheme, a lot of research have been initiated [1,2,3,4]. In an effort to improve the traditional Lotka-Volterra scheme, investigators have recently included various types of biological factors, such as Allee effects, sickness, a predator’s alternate food source, and fear mechanisms. This has resulted in rich dynamics of the system. Although direct killing has a negligible impact on prey population changing aspects, it is envisaged that predators would have an impact on the prey population [5,6,7].
Recent research, however, asserts that in addition to directly killing prey, predators also instill fear in their victims, which has a considerable negative influence on the prey population’s rate of reproduction [8,9,10,11,12,13]. When the behaviour and physiology of some prey species are altered by predator fear, it is more severe in comparison to simple killing [5]. Wang et al. developed a predator–prey scheme in [9] that involved the dread effect and highlighted how stabilising the system could be accomplished by increasing the cost of fear. However, the focus of all of this study has been on how fear influences the prey population’s pace of reproduction. However, other studies revealed that the existence of predators affected both the prey population’s birth and mortality rates [14, 15]. Recently, Mukherjee [16] has concentrated on this problem in his study. By adding intraspecific competition for the predator and accounting for the cost of anxiety on the death amount of the prey population, he improved the scheme of Wang et al. [9]. He found that the system oscillates when intraspecific value rivalry is low and the degree of dread is low (on both reproduction and the mortality amount of the prey population), but that the system can be stabilised when intraspecific value competition is high.
The pace of change of the present state relies not only on the current state but also on the state of a particular instant or period of time in the past, owing to the complexity and variety of biological systems. Researchers have proposed differential equations with time delay to describe and investigate the time-delay system. This attribute of the systems is known as time delay. In particular, a great deal of research has been done on the dynamics of predator–prey (PP) systems with delays. Numerous scholars have examined the effects of previous states of biological systems on current and future conditions. Incorporating time delay into biological models to reflect resource regeneration time, maturation time, response time, capture time, feeding time, and gestation period has been studied by a number of researchers [17,18,19]. Biological systems with temporal delays, on the other hand, exhibit more intricate and varied dynamic behaviours. Delays may lead to instability, periodic solutions (Hopf bifurcation), chaos, and a variety of oscillations [20, 21]. However, the majority of such models have either been utilised to research integer-order equations including delays or have not.
Apart from the standard derivative, fractional calculus has gained significant attention in recent years due to its significant memory effect. The derivative of fractional order for every function is dependent upon both its present and its past states. The exploration of incorporating integer-order models into fractional-order derivatives has emerged as a prominent subject within the field of dynamical systems. Because fractional-order derivatives include nonlocal and weakly singular kernels, qualitative investigations of fractional-order systems are much more complex than those of integer-order systems. In the context of biological modelling, it has been shown that fractional-order derivatives provide a more accurate representation compared to integer-order derivatives, mostly owing to the incorporation of memory effects. Hence this mathematical tool could be inferred ‘far’ from ‘realism’. But there are various physical phenomena have ‘intrinsic’ fractional order interpretation and so fractional order calculus is useful in order to explain these phenomena. Fractional order differential equations accumulate the entire information of the function due to its long memory process. Fractional calculus has been employed to formulate problems in a wide range of disciplines, including finance, biology, medicine, economics, and engineering [22,23,24,25]. There are various types to describe the fractional-order derivative; the one most frequently used is the Caputo-type derivative [26]. The non-integer order system has been the area of numerous investigates in recent years [27,28,29,30, 40, 41]. A fractional-order system’s response to harvesting was studied by Javidi and Nyamoradi [20]. Also, there are very few models [45,46,47,48,49] have been studied where toxic environment is discussed in fractional order framework. However, no comparable work has been made in non-integer order systems, where the dread of the predator causes a predator density-dependent death rate [42,43,44]. Therefore, in this study, we incorporate the non-integer order and the delay components in the reaction kinetics model that adheres to the Bazykin’s formalism [31]. The Rosenzweig–MacArthur system is enhanced by Bazykin’s prey-predator scheme, which also involves a density-dependent mortality pace for the predators. Our current study’s main objective is to look at the cost of dread and the effect of populace growth depending on memory length on complex dynamic behaviour. We also provide detailed simulation findings for the purpose of identifying the influence of fear and memory length on the movement of local and global bifurcation limit values.
The article is organised as follows. In Sect. 2, the model’s mathematical formulation and a few preliminary issues are covered. In Sect. 3, the model’s existence, uniqueness and boundedness are obtainable. In Sect. 4, stability analysis of all possible equilibrium points is studied. The model’s bifurcation criteria and global stability were also covered. Numerical simulations are run in Sect. 5 to substantiate the model’s theoretical findings. In Sect. 6, conclusions are provided.
2 Model’s Mathematical Formulation
The relationship between prey and predator is regulated using a set of coupled nonlinear ordinary differential equations in the traditional Rosenzweig–MacArthur scheme [32]:
with \(g\left( 0 \right),\,h\left( 0 \right) \ge 0\) being non-negative. The population amounts of prey and predators at an instant of time \(t^{\prime }\) are denoted by \(g\left( {t^{\prime } } \right)\) and \(h\left( {t^{\prime } } \right)\) correspondingly. The system (1)’s parameters are all positive quantities. The specific amount of increase and level of intraspecific rivalry within the prey population are \(\rho\) and \(a\) correspondingly. It is expected that the increasing prey population will adhere to the logistic law of increasing and exist in the nonappearance of a predator population. \(l_{1}\) denotes the level at which predators attack individual prey, \(l_{2}\) is the one-half of saturation amount and \(b\) is a deformation parameter for the saturating functional response [31]. It uses an equivalent parameterization for the saturating functional response as that given in [31]. The conversion rate and the predator’s intrinsic mortality rate are \(c\) and \(l_{3}\) respectively.
Bazykin [33, 34] modifies the model (1) to account for competition within species among predators. Although minimal population densities were maintained in each of the prey and predator populations, the existence of intra-specific rivalry within the predators may avoid excessive amplitude fluctuation. The Bazykin’s model, which incorporates the fear factor \(f\left( {k,h} \right) = \frac{1}{1 + kh},\,\) and \(l_{4}\) density dependent mortality amount in predator growth, is provided by
The model (2) is now extended to a Caputo fractional order derivative with delay, and it then transforms into
We briefly explore the non-dimensionalized formulation of the non-integer differential equation system before continuing, employing the same parameters transformation as \(t^{\prime } = l_{3} t,\,g = l_{2} x_{1} ,\,h = cl_{2} x_{2}\) in (3) we find
where \(r_{0} = \rho /l_{3} ,\,K_{0} = \rho /al_{2} ,\,K_{1} = l_{1} c/l_{3} ,\,K_{f} = cl_{2} l_{4} /l_{3}\). Without any loss of generality, we refer to \(t\) as dimensionless time. We substitute \(D^{\beta }\) as a Caputo derivative for \(_{{t_{0} }}^{C} D_{t}^{\beta }\) with \(t_{0} = 0\) in mathematical notation to make it easier to read. The scheme (4) with initial settings \(x_{1} \left( 0 \right)\) and \(x_{2} \left( t \right) = \varphi \left( t \right) > 0\left( {t \in \left[ { - \tau ,\,0} \right]} \right),\) where \(\varphi \left( t \right)\) is a smooth function. We will explore the influence of the time delay on the changing aspects of the scheme (4).
Before moving on to the stability and bifurcation findings from the scheme (4), we begin with certain lemmas associated to non-integer derivatives that will be beneficial in proving the essential conclusions of this subsection.
2.1 Preliminaries
Definition 1
([35]). The Caputo fractional derivative with order \(\beta > 0\) of a function \(f \in C^{n} \left( {[t_{0} ,\,\infty + ),\,{\mathbb{R}}} \right)\) is defined as:
\(_{{t_{0} }}^{C} D_{t}^{\beta } f\left( t \right) = \frac{1}{{\Gamma \left( {n - \beta } \right)}}\int\limits_{{t_{0} }}^{t} {\frac{{f^{\left( n \right)} \left( \nu \right)}}{{\left( {t - \nu } \right)^{\beta - n + 1} }}} \,d\nu ,\) where \(n \in {\mathbb{Z}}_{ + }\) such that \(n - 1 < \beta < n.\)
In particular, for \(0 < \beta \le 1:\)\(_{{t_{0} }}^{C} D_{t}^{\beta } f\left( t \right) = \frac{1}{{\Gamma \left( {1 - \beta } \right)}}\int\limits_{{t_{0} }}^{t} {\frac{{f^{\prime } \,\left( \nu \right)}}{{\left( {t - \nu } \right)^{\beta } }}} \,d\nu .\)
Definition 2
([35]). Let \(\beta > 0,\,\)\(\,n - 1 < \beta < n \in {\mathbb{N}}.\) Assume \(f^{k} \left( t \right),\,\,k = 0,\,1\,,\,...,\,\,n - 1\) are continuous functions on \([t_{0} ,\,\infty ),\)\(f^{n} \left( t \right)\) occurs with exponential order and \(_{{t_{0} }}^{C} D_{t}^{\beta } f\left( t \right)\) is piecewise continuous on \([t_{0} ,\,\infty ).\) Then.
\(L\left\{ {_{{t_{0} }}^{C} D_{t}^{\beta } f\left( t \right)} \right\} = s^{\beta } F\left( s \right) - \sum\limits_{k = 0}^{n - 1} {s^{\beta - k - 1} f^{\left( k \right)} \left( {t_{0} } \right),}\) and \(F\left( s \right) = L\left\{ {f\left( t \right)} \right\}.\)
Lemma 1
([36]). Consider the following \(n -\) dimensional fractional order system with delay: Let \(_{{t_{0} }}^{C} D_{t}^{\beta } x\left( t \right) = f_{i} \left( {x_{1} \left( t \right),...,\,x_{n} \left( t \right);\,\tau } \right)\,\,,\,\,i = 1,2,...,n,\) where \(0 < \beta < 1\) and the time delay \(\tau \ge 0\). The above system undergoes a Hopf bifurcation at the equilibrium \(x^{*} = \left( {x_{1}^{*} ,...,x_{n}^{*} } \right)\) when \(\tau = \tau^{*}\) if the following conditions are satisfied:
-
i.
All the eigenvalues \(\lambda_{i} \,\left( {i = 1\,,\,...\,,\,n} \right)\) of the coefficient matrix \(A\) of the linearised system of above with \(\tau = 0\) satisfy \(\left| {\arg \left( {\lambda_{i} } \right)} \right| > \frac{\beta \pi }{2}\).
-
ii.
The characteristic equation of the linearised system of above has a pair of purely imaginary roots \(\pm \,i\omega_{0}\) when \(\tau = \tau^{*}\).
-
iii.
(iii) \({\text{Re}} \left[ {\frac{ds\left( \tau \right)}{{d\tau }}} \right]_{{\left( {\tau = \tau^{*} \,,\,\omega = \omega_{0} } \right)}} \ne 0,\) where \({\text{Re}} \,[.]\) denotes the real part of the complex number.
3 Existence, Uniqueness and Boundedness
We investigate if a solution to the initial value scheme (4) exists and is unique.
where \(0 < \beta \le 1,\,t_{0} \ge 0,\,\tau > 0,\,E > 0,\) and the initial value function \(\mu \left( t \right) \in C\left( {\left[ {t_{0} - \tau ,\,t_{0} } \right],\,{\mathbb{R}}^{2} } \right).\)
Let.
\(\Omega \left( t \right) = \left( {x_{1} \left( t \right),\,x_{2} \left( t \right)} \right),\,\,q\left( {\Omega \left( t \right)} \right) = \left( {q_{1} \left( {\Omega \left( t \right)} \right),q_{2} \left( {\Omega \left( t \right)} \right)} \right)\),
where
For \(\Omega = \left( {x_{1} ,\,x_{2} } \right) \in {\mathbb{R}}^{2} ,\,\) take the norm \(\left\| \Omega \right\| = \left| {x_{1} } \right| + \left| {x_{2} } \right|.\) Take \(\sigma = C\left( {\left[ {t_{0} - \tau ,\,t_{0} + E} \right],\,{\mathbb{R}}^{2} } \right),\) and define the norm \(\left\| \Omega \right\|_{\sigma } = \max_{{t \in \left[ {t_{0} - \tau ,\,t_{0} + E} \right]}} \left\| {\Omega \left( t \right)} \right\|\) for \(\Omega \left( t \right) = \left( {x_{1} \left( t \right),\,x_{2} \left( t \right)} \right) \in \sigma\).
Set
Clearly, for any \(\Omega \left( t \right) \in U\), we have \( \left\| \Omega \right\|_{\sigma } \le M: = \max \{ \max _{{t \in \left[ {t_{0} - \tau ,{\kern 1pt} t_{0} } \right]}} \left\| {\mu \left( t \right)} \right\|,\,\left\| {\mu \left( {t_{0} } \right)} \right\| + R\} . \)
Therefore, for any \(\Omega \left( t \right) = \left( {x_{1} \left( t \right),\,x_{2} \left( t \right)} \right),\,\overline{\Omega } = \left( {\overline{x}_{1} \left( t \right),\,\overline{x}_{2} \left( t \right)} \right) \in U,\,\,t \in \left[ {t_{0} ,\,t_{0} + E} \right]\), we have
where \(L: = \max \left\{ {\left( {\frac{{r_{0} }}{{\left( {1 + KM} \right)}} + \frac{{2Mr_{0} }}{{K_{0} }}} \right),\,\,\left( {1 + 2MK_{f} + \frac{{r_{0} KM}}{{\left( {1 + KM} \right)^{2} }}} \right),\,\frac{{2K_{1} M}}{{\left( {1 + b\,M} \right)}}} \right\}\).
Similarly, for any \(\Omega \left( t \right) \in U,\,t \in \left[ {t_{0} ,\,t_{0} + E} \right]\), we have
Then, system (5) can be replaced into the corresponding Volterra equation of type two on applying the non-integer integral operator:
Define the operator \(\chi :U \to U,\) such that
Hence \(\chi\) possesses only a fixed point in \(U\) suggests that the scheme (5) has a unique solution.
From (7) and (9), if any \(\Omega \left( t \right) = \left( {x_{1} \left( t \right),\,x_{2} \left( t \right)} \right),\,\overline{\Omega }\left( t \right) = \left( {\overline{x}_{1} \left( t \right),\,\overline{x}_{2} \left( t \right)} \right) \in U,\,\,t \in \left[ {t_{0} ,\,t_{0} + E} \right],\) we have.
\(\begin{aligned}& \left\| {\chi \,\Omega \left( t \right) - \chi \,\overline{\Omega }\left( t \right)} \right\| \le \frac{1}{\Gamma \left( \beta \right)}\int\limits_{{t_{0} }}^{t} {\left( {t - \nu } \right)^{\beta - 1} \left\| {q\left( {\Omega \left( \nu \right)} \right) - q\left( {\overline{\Omega }\left( \nu \right)} \right)} \right\|\,d\nu } , \\ & \quad \le \frac{1}{\Gamma \left( \beta \right)}\int\limits_{{t_{0} }}^{t} {\left( {t - \nu } \right)^{\beta - 1} \left( {\left\| {\Omega \left( \nu \right) - \overline{\Omega }\left( \nu \right)} \right\| + \left\| {\Omega \left( {\nu - \tau } \right) - \overline{\Omega }\left( {\nu - \tau } \right)} \right\|} \right)\,d\nu } , \\ & \quad \le \frac{1}{\Gamma \left( \beta \right)}\int\limits_{{t_{0} }}^{t} {\left( {t - \nu } \right)^{\beta - 1} \left( {\mathop {\max }\limits_{{\nu \in \left[ {t_{0} ,\,t_{0} + E} \right]}} \left\| {\Omega \left( \nu \right) - \overline{\Omega }\left( \nu \right)} \right\| + \max \left\{ \begin{gathered} \mathop {\max }\limits_{{\nu \in \left[ {t_{0} - \tau ,\,t_{0} } \right]}} \left\| {\Omega \left( \nu \right) - \overline{\Omega }\left( \nu \right)} \right\|, \hfill \\ \mathop {\max }\limits_{{\nu \in \left[ {t_{0} ,\,t_{0} + E} \right]}} \left\| {\Omega \left( \nu \right) - \overline{\Omega }\left( \nu \right)} \right\| \hfill \\ \end{gathered} \right\}} \right)\,d\nu } , \\ &\quad \le \frac{2L}{{\Gamma \left( \beta \right)}}\int\limits_{{t_{0} }}^{t} {\left( {t - \nu } \right)^{\beta - 1} \left( {\mathop {\max }\limits_{{\nu \in \left[ {t_{0} ,\,t_{0} + E} \right]}} \left\| {\Omega \left( \nu \right) - \overline{\Omega }\left( \nu \right)} \right\|} \right)\,d\nu } , \\ & \quad \le \frac{{2LE^{\beta } }}{{\Gamma \left( {\beta + 1} \right)}}\left\| {\Omega - \overline{\Omega }} \right\|_{\sigma } . \\ \end{aligned}\) Hence, we possess \(\left\| {\chi \,\Omega \left( . \right) - \chi \,\overline{\Omega }\left( . \right)} \right\|_{\sigma } \le \frac{{2LE^{\beta } }}{{\Gamma \left( {\beta + 1} \right)}}\left\| {\Omega - \overline{\Omega }} \right\|_{\sigma } ,\) indicating as \(\chi\) is a contraction operator when \(E < \left( {\frac{{\Gamma \left( {\beta + 1} \right)}}{2L}} \right)^{1/\beta } .\)
For any \(\Omega \left( t \right) \in U,\,\,t \in \left[ {t_{0} ,\,t_{0} + E} \right],\) by (8) and (9), we have
If \(E \le \left( {\frac{{\Gamma \left( {\beta + 1} \right)R}}{LM}} \right)^{1/\beta } ,\) hence it ensues from (10) that \( \mathop {\max }\limits_{{\nu \in \left[ {t_{0} ,\,t_{0} + E} \right]}} \,\left\| {\chi \left( {\Omega \left( t \right) - \mu \left( {t_{0} } \right)} \right)} \right\| \le R \), this indicates \(\chi \left( {\Omega \left( t \right)} \right) \in U,\) at all \(\Omega \left( t \right) \in U.\)
According to the Banach contraction rule, \(\chi\) possesses only a fixed point in \(U\) if \(E < \min \left\{ {\left( {\frac{{\Gamma \left( {\beta + 1} \right)R}}{LM}} \right)^{1/\beta } ,\left( {\frac{{\Gamma \left( {\beta + 1} \right)}}{2L}} \right)^{1/\beta } } \right\}\). The subsequent theorem can be drawn from the study stated above.
Theorem 1
If \(E < \min \left\{ {\left( {\frac{{\Gamma \left( {\beta + 1} \right)R}}{LM}} \right)^{1/\beta } ,\left( {\frac{{\Gamma \left( {\beta + 1} \right)}}{2L}} \right)^{1/\beta } } \right\}\), then the initial value problem (5) possesses a unique solution.
4 Stability Analysis and Hopf Bifurcation
The equilibria of scheme (4) are the points of intersections at which \(D^{\beta } \,x_{1} = 0\) and \(D^{\beta } \,x_{2} = 0\). Thus, scheme (4) has three equilibrium points namely, trivial equilibrium point \(E_{0} = \left( {0,\,0} \right)\), axial equilibrium point \(E_{1} = \left( {x_{1} ,\,0} \right)\) where \(x_{1} = K_{0}\) and interior equilibrium point \(E^{*} = \left( {x_{1}^{*} ,\,\,x_{2}^{*} } \right)\), where it is the positive solution of
It is important to note that the expression for \(x_{1}^{*}\) and \(x_{2}^{*}\) are therefore too complex to compute analytically, so we clearly derived these points numerically for the parameter values we were considering.
The scheme (4) must be linearized around the relevant equilibrium point before applying Lemma 1 to verify the stability of possible equilibria. The variational matrix [47] for the scheme (4) is provided by
At \(E_{0} ,\) the variational matrix is given by \(J\left( {E_{0} } \right) = \left( {\begin{array}{l@{\qquad}l} {r_{0} } & 0 \\ 0 & { - 1} \\ \end{array} } \right)\).
The characteristic equation of above matrix is \(\left( {\lambda^{\beta } - r_{0} } \right)\left( {\lambda^{\beta } + 1} \right) = 0\) and this possess a positive root \(\lambda^{\beta } = r_{0}\) for \(\beta \in \left( {0,1} \right]\). Hence the trivial equilibrium is unstable i.e., a saddle point.
Theorem 2
Suppose in Lemma 1, condition (i) holds for system (4) then the auxiliary equilibrium point \(E_{1} = \left( {x_{1} ,\,0} \right)\) is asymptotically stable for \(\tau = 0\) if \(b\left( {1 + r_{0} } \right) > K_{1}\) &\(\left( {1 + bK_{0} } \right) > K_{0} K_{1}\), then the auxiliary equilibrium point is asymptotically stable for \(\tau \in \left[ {0,\tau^{*} } \right)\) and system (4) undergoes a Hopf bifurcation at the auxiliary equilibrium while \(\tau = \tau^{*}\). Then the following transversality condition holds \({\text{Re}} \left. {\left[ {\frac{d\lambda }{{d\tau }}} \right]} \right|_{{\left( {\phi = \phi_{0} ,\,\tau = \tau^{*} } \right)}} \ne 0\) (condition (iii) of Lemma 1).
Proof
At \(E_{1}\), the variational matrix can be obtained.
The latent equation is \(\lambda^{2\beta } + T\lambda^{\beta } + D = 0\),
where \(T = - r_{0} + \frac{{2r_{0} x_{1} }}{{K_{0} }} - \frac{{K_{1} x_{1} }}{{1 + bx_{1} }}e^{ - \lambda \tau } + 1\,,\,\,D = \frac{{r_{0} K_{1} x_{1} \left( {K_{0} - 2x_{1} } \right)}}{{K_{0} \left( {1 + bx_{1} } \right)}}e^{ - \lambda \tau } + \frac{{2r_{0} x_{1} }}{{K_{0} }} - r_{0}\).
where \(C_{1} = 1 - r_{0} + \frac{{2r_{0} x_{1} }}{{K_{0} }}\), \(C_{2} = \frac{{2r_{0} x_{1} }}{{K_{0} }} - r_{0}\), \(C_{3} = \frac{{K_{1} x_{1} }}{{1 + bx_{1} }}\), \(C_{4} = - \frac{{r_{0} K_{1} x_{1} \left( {K_{0} - 2x_{1} } \right)}}{{K_{0} \left( {1 + bx_{1} } \right)}}\).
When \(\tau = 0\),
Equation (14) makes it clear that for \(C_{1} - C_{3} > 0\) i.e., \(b\left( {1 + r_{0} } \right) > K_{1}\) and \(C_{2} - C_{4} > 0\) i.e., \(\left( {1 + bK_{0} } \right) > K_{0} K_{1}\). Hence the auxiliary equilibrium point \(E_{1}\) is asymptotically stable for \(b\left( {1 + r_{0} } \right) > K_{1}\) and \(\left( {1 + bK_{0} } \right) > K_{0} K_{1}\) with \(\tau = 0\) satisfy \(\left| {\arg \left( {\lambda_{i} } \right)} \right| > \frac{\beta \pi }{2}\).
We assume that the solution \(\lambda = i\varphi\) to Eq. (13) must be true if \(\tau > 0\),
We can obtain the following equations on separating the real and imaginary parts,
Solving (15) and (16), we get
If \(\left( {C_{1}^{2} - 2C_{2} - C_{3}^{2} } \right) > 0\) and \(\left( {C_{2} - C_{4} } \right) > 0\) then there is no positive real \(\varphi\) satisfying (17). But, if \(C_{2} - C_{4} < 0\) i.e.,\(\left( {1 + bK_{0} } \right) < K_{0} K_{1}\) then (17) has one positive root by \(\varphi_{0}\), and the characteristic Eq. (13) with couple of roots are completely imaginary \(\pm \,i\varphi_{0}\). Assuming \(\lambda \left( \tau \right) = \vartheta \left( \tau \right) + i\phi \left( \tau \right)\) is the eigen value of (18) such that \(\vartheta \left( {\tau^{*} } \right) = 0\) and \(\,\xi \left( {\tau^{*} } \right) = \phi_{0}\). From (15) and (16), we have.
\(\tau^{*} = \frac{1}{{\phi_{0} }}\arccos \left[ {\frac{{C_{2} C_{4} - \left( {C_{4} + C_{1} C_{3} } \right)\phi_{0}^{2\beta } }}{{C_{4}^{2} + C_{3}^{2} \phi_{0}^{2\beta } }}} \right] + \frac{2j\beta \pi }{{\phi_{0}^{\beta } }},\) and from (17)
To complete the stability criterion of the delayed system we have to verify the following transversality condition. Let the characteristic Eq. (13) can be written as
Differentiating (18) with respect to \(\tau\),we get
where \(P\left( \lambda \right) = \lambda \gamma_{2}\left( \lambda \right)e^{ - \lambda \tau }\), \(Q\left( \lambda \right) = \gamma_{1}^{\prime } \left( \lambda \right) +\gamma_{2}^{\prime } \left( \lambda \right)e^{ - \lambda \tau } -\tau \gamma_{2} \left( \lambda \right)e^{ - \lambda \tau }\), \(P\left({i\phi_{0} } \right) = P_{1} +iP_{2}\) and \(Q\left({i\phi_{0} } \right) = Q_{1} +iQ_{2}\).
Taking the real part both sides from (19)
where \(P_{1} = \phi_{0} \left( {\gamma_{2}^{{\text{Im}}} \cos \phi_{0} \tau - \gamma_{2}^{{\text{Re}}} \sin \phi_{0} \tau } \right)\), \(P_{2} = \phi_{0} \left( { - \gamma_{2}^{{\text{Re}}} \cos \phi_{0} \tau - \gamma_{2}^{{\text{Im}}} \sin \phi_{0} \tau } \right)\), \(Q_{1} = \gamma_{1}^{{\prime {\text{Re}} }} - \gamma_{2}^{{\prime {\text{Re}} }} \cos \phi_{0} \tau + \tau \gamma_{2}^{{\text{Re}}} \cos \phi_{0} \tau + \tau \gamma_{2}^{{\text{Im}}} \sin \phi_{0} \tau\), \(Q_{2} = \gamma_{1}^{{\prime {\text{Im}} }} + \gamma_{2}^{{\prime {\text{Re}} }} \sin \phi_{0} \tau - \tau \gamma_{2}^{{\text{Re}}} \sin \phi_{0} \tau + \tau \gamma_{2}^{{\text{Im}}} \cos \phi_{0} \tau\).
From (20), if \(\frac{{P_{{_{1} }} Q_{1} + P_{2} Q_{2} }}{{Q_{1}^{2} + Q_{2}^{2} }} \ne 0\) then transversality condition holds. Hence the Lemma 1 is proved for auxiliary equilibrium point.
Theorem 3
Suppose in Lemma 1, condition (i) holds for system (4) then the coexistence equilibrium point \(E^{*} = \left( {x_{1}^{*} ,\,\,x_{2}^{*} } \right)\) is asymptotically stable for \(\tau = 0\) if \(r_{0} \left( {1 + bx_{1} } \right)^{2} > bK_{0} K_{1} x_{2}\), then the coexistence equilibrium point is asymptotically stable for \(\tau \in \left[ {0,\tau^{*} } \right)\) and system (4) undergoes a Hopf bifurcation at the coexistence equilibrium while \(\tau = \tau^{*}\). Then the following transversality condition holds \({\text{Re}} \left. {\left[ {\frac{d\lambda }{{d\tau }}} \right]} \right|_{{\left( {\xi = \xi_{0} ,\,\tau = \tau^{*} } \right)}} \ne 0\) (condition (iii) of Lemma 1).
Proof
The variational matrix of the scheme (4) at a positive equilibrium point \(E^{*}\) is given by.
The characteristic equation is given by
where \(C_{1} = \left[ {\frac{{r_{0} x_{1} }}{{K_{0} }} - \frac{{K_{1} bx_{1} x_{2} }}{{\left( {1 + bx_{1} } \right)^{2} }} + \frac{{K_{1} x_{1} }}{{1 + bx_{1} }} + K_{f} x_{2} } \right],\) \(C_{2} = \frac{{r_{0} K_{1} x_{1}^{2} }}{{K_{0} \left( {1 + bx_{1} } \right)}} + \frac{{r_{0} K_{f} }}{{K_{0} }}x_{1} x_{2} - \frac{{bK_{f} K_{1} }}{{\left( {1 + bx_{1} } \right)^{2} }}x_{1} x_{2}^{2} + \frac{{KK_{1} r_{0} }}{{\left( {1 + bx_{1} } \right)^{2} \left( {1 + Kx_{2} } \right)^{2} }}x_{1} x_{2} ,\) \(C_{3} = - \frac{{K_{1} x_{1} }}{{1 + bx_{1} }}\,\,,\,\,C_{4} = \frac{{K_{1}^{2} x_{1} x_{2} }}{{\left( {1 + bx_{1} } \right)^{2} }} - \frac{{r_{0} K_{1} x_{1}^{2} }}{{K_{0} \left( {1 + bx_{1} } \right)}}\).
when \(\tau = 0\),
where \(C_{1} + C_{3} = \frac{{r_{0} x_{1} }}{{K_{0} }} - \frac{{K_{1} bx_{1} x_{2} }}{{\left( {1 + bx_{1} } \right)^{2} }} + K_{f} x_{2}\), \(C_{2} + C_{4} = \frac{{r_{0} K_{f} }}{{K_{0} }}x_{1} x_{2} - \frac{{bK_{f} K_{1} }}{{\left( {1 + bx_{1} } \right)^{2} }}x_{1} x_{2}^{2} + \frac{{KK_{1} r_{0} }}{{\left( {1 + bx_{1} } \right)^{2} \left( {1 + Kx_{2} } \right)^{2} }}x_{1} x_{2} + \frac{{K_{1}^{2} }}{{\left( {1 + bx_{1} } \right)^{2} }}x_{1} x_{2}\).
\(\left( {C_{1} + C_{3} } \right) > 0\,\,{\text{and}}\,\left( {C_{2} + C_{4} } \right) > 0\,\) when \(r_{0} \left( {1 + bx_{1} } \right)^{2} > bK_{0} K_{1} x_{2}\), then there exists couple of roots which are real and nonpositive. Thus, for \(\tau = 0\) the equilibrium \(E^{*}\) is asymptotically stable. When \(\tau > 0\), we assume that the solution of Eq. (21) \(\lambda = i\xi\) must satisfy.
\(\begin{gathered} - \xi^{2\beta } + C_{2} + C_{1} i\xi^{\beta } + \left( {\cos \xi \tau - i\sin \xi \tau } \right)\left( {C_{3} i\xi^{\beta } + C_{4} } \right) = 0 \hfill \\ \xi^{2\beta } - C_{2} = C_{3} \xi^{\beta } \sin \xi \tau + C_{4} \cos \xi \tau + C_{1} i\xi^{\beta } + i\left( {C_{3} \xi^{\beta } \cos \xi \tau - C_{4} \sin \xi \tau } \right). \hfill \\ \end{gathered}\)
On separating real and imaginary components, we get the following:
We can obtain the following equation on squaring and adding of Eqs. (23) and (24)
We can immediately establish that \(\left( {C_{1}^{2} - 2C_{2} - C_{3}^{2} } \right) > 0\) and if \(\left( {C_{2} - C_{4} } \right) > 0\) then there is no positive real \(\xi\) satisfying (25). As a result, (21)’s roots of are non-positive. On the other hand, if \(\left( {C_{2} - C_{4} } \right) < 0\) therefore (25) only has the one positive root denoted with \(\xi_{0}\), and the latent Eq. (21) has two completely imaginary roots \(\pm \,i\xi_{0}\). Assuming \(\lambda \left( \tau \right) = \vartheta \left( \tau \right) + i\xi \left( \tau \right)\) is the eigenvalue of (21) such that \(\vartheta \left( {\tau^{*} } \right) = 0\,\,{\text{and}}\,\,\,\xi \left( {\tau^{*} } \right) = \xi_{0}\). From (23) and (24), we have \(\tau^{*} = \frac{1}{{\xi_{0} }}\arccos \left[ {\frac{{\left( {C_{4} + C_{1} C_{3} } \right)\xi_{0}^{2\beta } - C_{2} C_{4} }}{{C_{4}^{2} + C_{3}^{2} \xi_{0}^{2\beta } }}} \right] + \frac{2j\beta \pi }{{\xi_{0}^{\beta } }},\) and from (25)
To complete the stability criterion of the delayed system we have to verify the following transversality condition. Let the characteristic Eq. (21) can be written as \(\gamma_{1} \left( \lambda \right) + \gamma_{2} \left( \lambda \right)e^{ - \lambda \tau } = 0\).
Following the same procedure as in (Theorem 2), we obtain
where \(P_{1} = \xi_{0} \left( {\gamma_{2}^{{\text{Re}}} \sin \xi_{0} \tau - \gamma_{2}^{{\text{Im}}} \cos \xi_{0} \tau } \right)\), \(P_{2} = \xi_{0} \left( {\gamma_{2}^{{\text{Re}}} \cos \xi_{0} \tau + \gamma_{2}^{{\text{Im}}} \sin \xi_{0} \tau } \right)\), \(Q_{1} = \gamma_{1}^{{\prime {\text{Re}} }} + \gamma_{2}^{{\prime {\text{Re}} }} \cos \xi_{0} \tau - \tau \gamma_{2}^{{\text{Re}}} \cos \xi_{0} \tau - \tau \gamma_{2}^{{\text{Im}}} \sin \xi_{0} \tau\), \(Q_{2} = \gamma_{1}^{{\prime {\text{Im}} }} - \gamma_{2}^{{\prime {\text{Re}} }} \sin \xi_{0} \tau + \tau \gamma_{2}^{{\text{Re}}} \sin \xi_{0} \tau - \tau \gamma_{2}^{{\text{Im}}} \cos \xi_{0} \tau\). From (27), if \(\frac{{P_{{_{1} }} Q_{1} + P_{2} Q_{2} }}{{Q_{1}^{2} + Q_{2}^{2} }} \ne 0\) then the transversality condition holds.
Hence the Lemma 1 is proved for the coexistence equilibrium point.
5 Global Stability Analysis
Here, we expand on the investigation to examine the criteria for global stability [37, 38] for the non-integer order delay differential scheme. In order to investigate the global stability of the equilibrium points in scheme (4), we linearize the system into form
where,
\(m_{1} = \frac{{r_{0} }}{{1 + K\,x_{2}^{*} }} - \frac{{2r_{0} x_{1}^{*} }}{{K_{0} }} - \frac{{K_{1} x_{2}^{*} }}{{1 + bx_{1}^{*} }} + \frac{{K_{1} b\,x_{1}^{*} x_{2}^{*} }}{{\left( {1 + bx_{1}^{*} } \right)^{2} }},\,\,m_{2} = - \frac{{r_{0} K\,x_{1}^{*} }}{{\left( {1 + K\,x_{2}^{*} } \right)^{2} }},\,\,m_{3} = - \frac{{K_{1} x_{1}^{*} }}{{1 + bx_{1}^{*} }}\), \(n_{1} = \frac{{K_{1} x_{2}^{*} }}{{1 + bx_{1}^{*} }} - \frac{{K_{1} b\,x_{1}^{*} x_{2}^{*} }}{{\left( {1 + bx_{1}^{*} } \right)^{2} }},\,n_{2} = - \left( {1 + 2K_{f} x_{2}^{*} } \right),\,n_{3} = \frac{{K_{1} x_{1}^{*} }}{{1 + bx_{1}^{*} }}\).
If the equilibrium point of the linear non-integer differential equation is not zero, we can move it to the origin. Put \(\overline{x}_{1} \left( t \right) = x_{1} \left( t \right) - x_{1}^{*} ,\,\,\overline{x}_{2} \left( t \right) = x_{2} \left( t \right) - x_{2}^{*}\), then the Eq. (28) becomes
We apply the Laplace transform [39] on both sides of (29) to examine the stability of model (4). Finally, we have
Here, it should be stated that the initial values \(\overline{x}_{1} \left( t \right) = \varphi_{1} \left( t \right)\) and \(\overline{x}_{2} \left( t \right) = \varphi_{2} \left( t \right)\) with \(t \in \left[ { - \tau ,\,0} \right].\) Also \(X_{1} \left( s \right)\) and \(X_{2} \left( s \right)\) are Laplace transform of \(\overline{x}_{1} \left( t \right)\) and \(\overline{x}_{2} \left( t \right)\) with \(X_{1} \left( s \right) = L\left( {\overline{x}_{1} \left( t \right)} \right)\) and \(X_{2} \left( s \right) = L\left( {\overline{x}_{2} \left( t \right)} \right)\). The system (30) can be rewritten as follows.
In which.
\(\Delta \left( s \right) = \left( {\begin{array}{*{20}c} {s^{\beta } \, - m_{1} } & { - m_{2} - m_{3} e^{ - s\tau } } \\ { - n_{1} } & {s^{\beta } - n_{2} - n_{3} e^{ - s\tau } } \\ \end{array} } \right)\) and.
\(p_{1} \left( s \right) = s^{\beta - 1} \varphi_{1} \left( 0 \right) + m_{3} e^{ - s\tau } \displaystyle\int\limits_{ - \tau }^{0} {e^{ - s\tau } } \varphi_{1} \left( t \right)\,dt\),
\(p_{2} \left( s \right) = s^{\beta - 1} \varphi_{2} \left( 0 \right) + n_{3} e^{ - s\tau } \displaystyle\int\limits_{ - \tau }^{0} {e^{ - s\tau } } \varphi_{2} \left( t \right)\,dt\).
\(\Delta \left( s \right)\) gives as the model (4)’s latent matrix with its polynomial \(\left| {\Delta \left( s \right)} \right|\). The distribution of the characteristic roots of the latent polynomial consequently establishes the stability of scheme (4). In which mean that if all of the roots of the latent equation are negative, the previously mentioned non-integer order prey predator’s equilibrium is Lyapunov globally asymptotically stable if the equilibrium exists [37]. The result of multiplying two sides of (31) with \(s\) is
Since every root of the transcendental equation \(\left| {\Delta \left( s \right)} \right| = 0\) must be on the open left complex plane, i.e., \({\text{Re}} \left( s \right) < 0\), then we consider (28) in \({\text{Re}} \left( s \right) \ge 0.\) Within this limited area, system (32) possess only solution \(\left( {s\,X_{1} \left( s \right),\,\,s\,X_{2} \left( s \right)} \right)\), so that
Considering the Laplace transform’s final-value theorem [39]and the assumption in which every root of the characteristic equation \(\left| {\Delta \left( s \right)} \right| = 0\), we get.
\(\mathop {\lim }\limits_{t \to + \infty } \overline{x}_{1} \left( t \right) \equiv \mathop {\lim }\limits_{{s \to 0,\,{\text{Re}} \left( s \right) \ge 0}} s\,X_{1} \left( s \right) = 0,\,\) and
This indicates that the non-integer order prey-predator model’s zero solution is Lyapunov globally asymptotically stable. As it turns out, we come to the following conclusion.
Theorem 4
If all the roots of the latent equation \(\left| {\Delta \left( s \right)} \right| = 0\) possess non positive real parts, then the positive equilibrium point \(\left( {x_{1}^{*} ,\,\,x_{2}^{*} } \right)\) of the scheme (4) is Lyapunov globally asymptotically stable.
6 Numerical Simulations
We provide some numerical simulation outcomes in this part to substantiate our analytical findings. Scheme (4) was solved using the two-step Adams–Bashforth–Moulton algorithm for the system of two FODE in order to achieve this. We concentrate on the effects of the parameter’s degree of dread \(K\), time delay \(\tau\), and fractional order \(\beta\) of scheme (4).
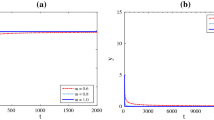
Employing the parameter values listed in the figure captions, the solution has been approximately estimated in each numerical run. According to the results of the analysis, it can be seen that when \(\tau < \tau^{*} = 0.315\), all paths of the non-integer order scheme (4) lead to the coexistence equilibrium point \(E^{*} \left( {0.6835,\,0.8375} \right)\), which is depicted in Fig. 1a; however, when \(\tau\) is raised to a level that exceed \(\tau^{*}\), the equilibrium becomes unstable and a stable limit cycle develops around the equilibrium point, as is depicted in Fig. 1b and c.

Behaviour of the scheme (4) for various values of delay parameter \(\tau = 0.3,\,0.45\,{\text{and}}\,0.8\) when \(r_{0} = 1.75,\,K = 0.113,\,\,K_{0} = 4.42\,,\,K_{1} = 1.64,b = 0.05,\) \(\alpha = 0.98,\,\,K_{f} = 0.100242,\) as shown in (a–c)
Assuming that \(K = 0.08\) at this point, Fig. 2 indicates the solution to scheme (4) for various amounts of \(\beta\). We found that scheme (4) is not stable for the integer order scheme \(\beta = 1\) and \(\beta = 0.98\), whereas our suggested system is stable for \(\beta = 0.95\), coexistence equilibrium point \(E^{*} \left( {0.7627,\,0.8463} \right)\). The model exhibits an unstable behaviour once the influence of fear is extremely low for integer-order systems, however stability alters and turn into stable for fractional order-derivative systems. As a result, it is possible to draw the conclusion that the non-integer order derivative can stabilize the model.

Phase portrait of thescheme (4) using various amounts of \(\beta\) when \(r_{0} = 1.75,\,K_{0} = 4.42,\,K_{1} = 1.64,\)\(b = 0.05,\,\,\alpha = 0.98,\,K_{f} = 0.242,\,\,\tau = 0.6\)
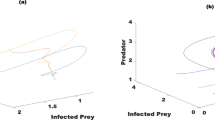
We’ve produced the diagram in Fig. 3 to analyse how fractional order derivative \(\beta\) affects each population because \(\beta\) is substantial to the changing aspects of the system. For various amounts of \(\beta\), this displays the phase plane of the prey predator as follows. If \(\beta = 0.91\) all trajectories get attracted to a stable equilibrium point, and if \(\beta = 0.98\), a stable limit cycle develops and is drawn to by all trajectories. The model’s oscillation behaviour has been observed to be dampened by the fractional derivative (see Figs. 3 and 4).

Phase portrait of fractional order scheme (4) for various amounts of fractional order effect \(\beta = 0.91,\,\,0.98\,,\,\,\tau = 0.8\) and remaining parameter values are same as Fig. 1

Behaviors of the scheme (4) with different initial conditions and \(\beta = 0.8\,,\,\,\tau = 0.8 > \tau^{*}\), remaining parameter values are same as Fig. 1
7 Conclusions
The coexistence of biological processes using fractional-order differential equations has been studied using numerous kinds of mathematical and analytical techniques. The nonlocal characteristic of a non-integer order system is dependent on the current state as well as all previous states. As a result, the order of differentiation \(\beta\) must be precisely converted from an integer-order model to a fractional order model because even a minor change in \(\beta\) can have a significant impact on the outcome. Certain processes that can’t be modelled by IDEs can be modelled using fractional order differential equations. FDEs are therefore mostly used in biological schemes because they are connected to memory-based schemes.
We developed a FODE-based delayed Bazykin’s scheme with the addition of the fear effect in order to analyse the effects of prey and predator population levels through time and precisely predict the increasing rates of each species at the moment in time. Our main goal is to look at how fear, time delay, and non-integer order derivatives affect the changing aspects of the system. Three equilibrium points exist in scheme (4), including the trivial equilibrium point \(E_{0}\),which is at all times a saddle point, the predator-free equilibrium \(E_{1}\), which is locally stable if \(b\left( {1 + r_{0} } \right) > K_{1}\) and \(\left( {1 + bK_{0} } \right) > K_{0} K_{1}\), and the interior equilibrium \(E^{*}\).
Investigations have been made into the requirements for both local and global stability of the interior equilibrium. Additionally, theoretical study reveals that non-integer order and time delay may have an impact on whether a Hopf bifurcation exists. Numerical simulations are used to substantiate all theoretical results in our work. It can be observed that the system exhibits several complex phenomena as the fractional-order derivative \(\beta\) is varied. We found that the integer-order system behaves in an unstable manner when the amount of fear is low, whereas the fractional-order derivative behaves in a stable manner. We can draw the conclusion that anon-integer order derivative can stabilise the system because of the memory effect. The next step in our research is to examine the impact of memory-based population growth on extinction probabilities for population models that include interactions with the Allee effect, as well as the behaviour in the population scheme(s), which will include the impact of predator-dependent functional response. Also, we aimed to study the optimal control of harvesting model in the influence of toxic substances under fractional order frame work in future.
Data Availability
Data sharing is not applicable to this article as no datasets were generated or analysed during the current study.
References
Lotka, A.: Elements of Physical Biology. Williams and Wilkins, Baltimore (1925)
Volterra, V.: Variazioni e fluttuazioni del numero di individui in specie animali conviventi. Mem. Acad. Lincei. 2, 31–113 (1926)
Berryman, A.A.: The origins and evolution of predator-prey theory. Ecology 73, 1530–1535 (1992)
Hassel, M.: The Dynamics of Arthropod Predator-Prey Systems. Princeton University Press, Princeton (1978)
Creel, S., Christianson, D.: Relationships between direct predation and risk effects. Trends Ecol. Evol. 23(4), 194–201 (2008)
Cresswell, W.: Non-lethal effects of predation in birds. Ibis 150(1), 3–17 (2008)
Holt, R.H., Davies, Z.G., Staddon, S.: Meta-analysis of the effects of predation on animal prey abundance: evidence from UK vertebrates. PLoS ONE 3(6), 1–8 (2008)
Zanette, L.Y., Clinchy, M.: Perceived predation risk reduces the number of off-spring songbirds produce per year. Science 334(6061), 1398–1401 (2011)
Wang, X., Zanette, L., Zou, X.: Modelling the fear effect in predator-prey interactions. J. Math. Biol. 73(5), 1–26 (2016)
Wang, X., Zou, X.: Modeling the fear effect in predator-prey interactions with adaptive avoidance of predators. Bull. Math. Biol. 79(6), 1–35 (2017)
Sasmal, S.: Population dynamics with multiple Allee effects induced by fear factors - a mathematical study on prey-predator. Appl. Math. Model. 64, 1–14 (2018)
Mondal, S., Maiti, A., Samanta, G.P.: Effects of fear and additional food in a delayed predator-prey model. Biophys. Rev. Lett. 13(4), 157–177 (2018)
Mukherjee, D.: Study of fear mechanism in predator-prey system in the presence of competitor for the prey. Ecol. Genet. Genom. 15, 1–22 (2020)
McCauley, S.J., Rowe, L., Fortin, M.J.: The deadly effects of “nonlethal” predators. Ecology 92, 2043–2048 (2011)
Siepielski, A.M., Wang, J., Prince, G.: Non-consumptive predator-driven mortality causes natural selection on prey. Evolution 68(3), 696–704 (2014)
Mukherjee, D.: Role of fear in predator–prey system with intraspecific competition. Math. Comput. Simul 177, 263–275 (2020)
Meng, X., Jiao, J., Chen, L.: The dynamics of an age structured predator–prey model with disturbing pulse and time delays. Nonlinear Anal. Real World Appl. 9(2), 547–561 (2008)
Xia, Y., Cao, J., Cheng, S.: Multiple periodic solutions of a delayed stage-structured predator–prey model with nonmonotone functional responses. Appl. Math. Model. 31(9), 1947–1959 (2007)
Zhang, J.F.: Bifurcation analysis of a modified Holling-Tanner predator–prey model with time delay. Appl. Math. Model. 36(3), 1219–1231 (2012)
Javidi, M., Nyamoradi, N.: Dynamic analysis of a fractional order prey–predator interaction with harvesting. Appl. Math. Model. 37, 8946–8956 (2013)
Rivero, M., Trujillo, J., Vazquez, L., Velasco, M.: Fractional dynamics of populations. Appl. Math. Comput. 218(3), 1089–1095 (2011)
El-Sayed, A., El-Mesiry, A.E.M., El-Saka, H.A.A.: On the fractional order logistic equation. Appl. Math. Lett. 20(7), 817–823 (2007)
Rihan, F.A., Abdel Rahman, D.H.: Delay differential model for tumor-immune dynamics with HIV infection of CD+t-cells. Int. J. Comput. Math. 90(3), 594–614 (2013)
Debnath, L.: Recent applications of fractional calculus to science and engineering. Int. J. Math. Math. Sci. 54, 3413–3442 (2003)
Machado, J.: Entropy analysis of integer and fractional dynamical systems. Non-linear Dyn. 62(1), 371–378 (2010)
Caputo, M.: Linear models of dissipation whose q is almost frequency independent-II. Geophys. J. R. Astron. Soc. 13(5), 529–539 (1967)
Ghaziani, R., Alidousti, J., Eshkaftaki, A.B.: Stability and dynamics of a fractional order Leslie-Gower prey-predator model. Appl. Math. Model. 40(3), 2075–2086 (2016)
Matouk, A.E., Elsadany, A.A.: Dynamical analysis, stabilization and discretization of a chaotic fractional-order GLV model. Nonlinear Dyn. 85(3), 1597–1612 (2016)
Moustafa, M., Mohd, M.H., Ismail, A.I.: Dynamical analysis of a fractional-order Rosenzweig-Macarthur model incorporating a prey refuge. Chaos Solitons Fractals 109, 1–13 (2018)
Das, M., Samanta, G.P.: A prey-predator fractional order model with fear effect and group defense. Int. J. Dyn. Control. 9, 334–349 (2020)
McGehee, E.A., Schutt, N., Vasquez, D.A., Peacock-Lopez, E.: Bifurcations and temporal and spatial patterns of a modified Lotka-Volterra model. Int. J. Bif. Chaos. 18(8), 2223–2248 (2008)
Kot, M.: Elements of Mathematical Biology. Cambridge University Press, New York (2001)
Bazykin, A. D.: Volterra system and Michaelis-Menten equation in: voprosy matematich-eskoi genetiki. Nauka Novosibirsk Russia; 103–43 (1974)
Bazykin, A.D., Khibnik, A.I., Krauskopf, B.: Nonlinear Dynamics of Interacting Populations. World Scientific Publishing, Singapore (1998)
Podlubny, I.: Fractional Differential Equations. Academic Press, New York (1993)
Xiao, M., Jiang, G., Cao, J., Zheng, W.: Local bifurcation analysis of a delayed fractional-order dynamic model of dual congestion control algorithms. IEEE/CAA J. Autom. Sin. 4, 361–369 (2017)
Deng, W., Li, C., Lu, J.: Stability analysis of linear fractional differential system with multiple time delays. Nonlinear Dyn. 48, 409–416 (2007)
Li, C., Zhang, F.: A survey on the stability of fractional differential equations. Eur. Phys. J. Spec. Top. 193, 27–47 (2011)
Muth, E.: Transform Methods with Applications to Engineering and Operations Research. Prentice-Hall, New Jersey (1977)
Khan, A., Alshehri, H.M., Gómez-Aguilar, J.F., Khan, Z.A., Fernández-Anaya, G.: A predator–prey model involving variable-order fractional differential equations with Mittag-Leffler kernel. Adv. Differ. Equ. 183, 1–18 (2021)
Devi, A., Kumar, A., Baleanu, D., Khan, A.: On stability analysis and existence of positive solutions for a general non-linear fractional differential equation. Adv. Differ. Equ. 300, 1–16 (2020)
Venkatesan, G., Sivaraj, P., Suresh Kumar, P., Balachandran, K.: Asymptotic stability of fractional Langevin systems. J. Appl. Nonlinear Dyn. 11(03), 635–650 (2022)
Poovarasan, R., Kumar, P., Nisar, K.S., Govindaraj, V.: The existence, uniqueness, and stability analyses of the generalized Caputo-type fractional boundary value problems. AIMS Math. 8(7), 16757–16772 (2023)
Sene, N.: Fundamental results about the fractional integro-differential equation described with Caputo derivative. Adv. Nonlinear Anal. Appl. 2022, 1–10 (2022)
Thomas, E.: Applied Delay Differential Equations. Springer, New York (2009)
Das, M., Maiti, A., Samanta, G.P.: Stability analysis of a prey-predator fractional order model incorporating prey refuge. Ecol. Genet. Genom. 7–8, 33–46 (2018)
Das, M., Samanta, G.P.: A delayed fractional order food chain model with fear effect and prey refuge. Math. Comput. Simul 178, 218–245 (2020)
Das, M., Samanta, G.P.: Evolutionary dynamics of a competitive fractional order model under the influence of toxic substances. SeMA 78, 595–621 (2021)
Samanta, G.: Deterministic, Stochastic and Thermodynamic Modelling of Some Interacting Species. Springer, Singapore (2021)
Acknowledgements
The authors are grateful to all the reviewers for their careful reading, valuable comments and helpful suggestions, which have helped us to improve the presentation of this work significantly. Also, the authors Aziz Khan and Thabet Abdeljawad would like to thank Prince Sultan University, Saudi Arabia for paying the APC and the support through TAS research lab.
Funding
Not applicable.
Author information
Authors and Affiliations
Contributions
All authors contributed equally and significantly in writing this paper and typed, read, and approved the final manuscript.
Corresponding authors
Ethics declarations
Conflict of interest
The authors declare that they have no competing interests.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Kumar, G.R., Ramesh, K., Khan, A. et al. Bazykin’s Predator–Prey Model Includes a Dynamical Analysis of a Caputo Fractional Order Delay Fear and the Effect of the Population-Based Mortality Rate on the Growth of Predators. Qual. Theory Dyn. Syst. 23, 130 (2024). https://doi.org/10.1007/s12346-024-00981-6
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s12346-024-00981-6