
Abstract
Numerous studies are currently focused on improving the performance and efficiency of electric vehicles (EVs). This research aims to evaluate the necessity for a practical testing methodology to simulate real-world driving scenarios by comparing the driving range measured on a chassis dynamometer with the ranges observed under various actual driving conditions. Tests were conducted on the chassis dynamometer using the multi-cycle test (MCT) mode, employing the urban dynamometer driving schedule (UDDS) and the highway fuel economy driving test (HWFET). Subsequently, we assessed the energy efficiency of three routes compliant with the real-driving emissions-light duty vehicles (RDE-LDV) regulations under real-world driving conditions. Our findings revealed disparities in energy efficiency ranging from 10.8 to 22.9% when driving on the same route and up to 29.3% when driving on different routes. This study highlights the importance of tailoring information provision, such as certification tests, to each country’s environmental context.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
As the significance of environmental protection and energy efficiency continues to increase, the development and proliferation of electric vehicles (EVs) are advancing rapidly (Sanguesa et al., 2021). Electric vehicles strive to minimize carbon dioxide emissions and promote sustainable utilization of energy, with ongoing research focusing on enhancing vehicle performance and efficiency (Park et al., 2023). Extensive research is underway on battery technology (Chen et al., 2022), lightweight materials (Cimprich et al., 2023), and regenerative braking (Hamada & Orhan, 2022).
To evaluate the performance of EVs under development, Europe employs the WLTP (UNECE, 2021), and the United States and Korea utilize the MCT (SAE, 2021). China adopts the CLTC (Yu et al., 2020) to assess the driving range and energy efficiency of each vehicle. This test mode involves the progression of the state of charge (SOC) of an EV from fully charged to fully discharged. With the advancement of the EV driving range owing to technological progress, there has been an associated increase in test time and costs, resulting in significant fatigue for certification test performers (Choi et al., 2021). Hence, Noh et al., (2024) conducted a study on methods for shortening tests and determined that the short process test (SPT) method can reduce testing times by up to 85%. Rho et al., (2021) found that applying an improved MCT methodology can reduce the time by up to 19 and 23 min. Furthermore, a study conducted by Rho and Noh (2022) concluded that implementing the SPT method could reduce the testing time by 3 h for Vehicle A and 4 h for Vehicle B in comparison with the current EV test, thereby enhancing the test efficiency and ensuring field safety.
However, persistent issues arise from internal combustion engine vehicles, highlighting that certification tests conducted on chassis dynamometers fail to accurately replicate the diverse driving conditions experienced in individual countries. Ma et al., (2019) emphasized that the lack of representativeness of the driving cycle used during regulatory laboratory tests significantly contributes to the substantial gap between actual energy consumption and type-approval levels. Similarly, Pavlovic et al., (2016) found that measurements obtained from chassis dynamometers tend to overestimate vehicle fuel consumption, exacerbating the disparity between real-world fuel consumption and type-approval values. This disparity has continued to widen over time, with the average disparity in Europe increasing from 8 to 39% between 2001 and 2007, as reported by a study conducted by the International Council on Clean Transportation (ICCT) (Greene et al., 2017). Furthermore, research has shown that the performance of EVs is significantly influenced by various factors in real-world driving conditions, including ambient temperature (Hao et al., 2020), driving route (Lajunen, 2014), and driver behavior (Braun & Rid, 2018).
Therefore, our objective is to assess the disparity between certification tests conducted on chassis dynamometers and the energy efficiency observed during real-world driving across diverse Korean road conditions, confirming the necessity for a practical testing methodology aligned with real-world driving scenarios in the future.
2 Methodology
2.1 Test Vehicle and Equipment
In this study, approximately 90 data points, including vehicle speed, motor speed/torque, and battery current/voltage, were collected at 1 Hz intervals using CAN equipment connected to the vehicle’s on-board diagnostics (OBD) system during both chassis dynamometer tests and real-world driving tests using a battery electric vehicle (BEV). A schematic illustrating the test setup with the CAN equipment is presented in Fig. 1. The detailed specifications of the CAN equipment are listed in Table 1. The test vehicle employed was a rear-wheel drive (RWD) vehicle equipped with a 72.6 kWh battery capacity, with comprehensive specifications listed in Table 2.

Data acquisition using CAN equipment
2.1.1 Verification of CAN Equipment Utilization
In our previous study Lee et al. (2023a), Lee et al. (2023b)), correlation validation was conducted by comparing data concurrently obtained from the CAN equipment of a test vehicle and a power analyzer using a chassis dynamometer. Data on vehicle speed, battery current, and battery voltage were collected over 2-min intervals at speeds ranging from 0 to 120 km/h in increments of 10 km/h. A comparison of the data acquired from both instruments revealed exceptionally high correlations, with R-squared (R2) values of 0.9998, 0.9929, and 0.9845 for the vehicle speed, battery current, and battery voltage, respectively. Consequently, the discrepancy between the power analyzer and CAN equipment in evaluating battery consumption was only 0.2%, confirming the reliability of acquiring test data through CAN equipment for future experiments.
2.2 Test Mode
To analyze the energy consumption characteristics with respect to ambient temperature, a comprehensive testing setup was established. Tests were conducted under controlled laboratory and real-driving conditions.
2.2.1 Chassis Dynamometer Test
The MCT mode, employed as a certification test mode for evaluating the EV energy efficiency and driving range, involves repeating the UDDS-HWFET-UDDS-CSC (constant-speed cycle) sequence twice, proceeding from full battery charge to discharge. The CSC segment was designed to ensure reliable battery discharge through constant-speed driving while concurrently reducing the overall test duration. To maintain efficiency, the CSCE section should not exceed 20% of the total driving distance during the test. In this study, data were collected with the CSC segment set at a speed of 88.5 km/h, in accordance with the SAE regulation (2017). The real-time speed profile and battery SOC obtained during the MCT are shown in Fig. 2. Detailed specifications of the chassis dynamometer used in the tests are listed in Table 3.

Speed profile and battery SOC of MCT mode
2.2.2 Real-World Driving Test
In response to the challenge of indoor certification tests for internal combustion engine vehicles failing to replicate the diverse driving patterns encountered in real-world scenarios, research endeavors have been undertaken to formulate various driving routes that align with real-driving emissions-light duty vehicles (RDE-LDV) regulations (Kang et al., 2017). The RDE-LDV route regulations require division into sections based on vehicle speed, categorizing them as urban (60 km/h or less), rural (exceeding 60 km/h but not exceeding 90 km/h), or motorway (exceeding 90 km/h). For each section, the RDE-LDV regulations stipulate a minimum driving distance of 16 km, which must be continuous and follow the sequence of urban, rural, and motorway. The distribution of driving distance by section can be adjusted within 10%, with the allocation set at 34% in urban, 33% in rural, and motorway areas; however, the urban portion must exceed 29%. However, regulations and systems for conducting real-world tests on EVs have not yet been established.
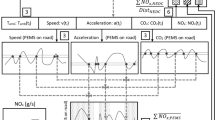
Therefore, this study assesses and compares the performance of EVs on diverse routes adhering to the route criteria outlined in the RDE-LDV, which has been implemented for internal combustion engine vehicles. Test data were collected on the Konkuk University (KU) Route (Lee et al., 2024) and the GangNam Route (Lee et al., 2023a, 2023b), as detailed in the author’s previous research, along with the Korea National University of Transportation (KNUT) route examined by Yu et al., (2019). These routes represent distinct driving characteristics: the KU and GangNam routes typify metropolitan driving conditions, whereas the KNUT route mirrors the driving behaviors observed in smaller provincial cities. The data were obtained using the same vehicle across all test routes. The driving routes, speed profiles, and battery consumption for each route are shown in Fig. 3. In addition, altitude data for each route sourced from Google Earth were provided, with sections featuring rapid altitude changes indicating tunnel passages.

Test route: speed profile, battery consumption, and altitude
2.3 Data Analysis
In this study, battery consumption was computed using the battery current and voltage data obtained through the CAN, employing the equation shown in Eq. (1)
where BC is battery consumption.
Equation (2) was utilized to calculate the energy efficiency for each section by dividing the driving range of each section by the battery consumption
where EEsection is energy efficiency of each section, and Rsection is the driving range of each section.
3 Results
3.1 Comparison of Chassis Dynamometer Test
The UDDS mode evaluates urban driving characteristics over an 11.8 km distance, whereas the HWFET mode assesses high-speed driving characteristics over a 16.4 km distance. The MCT mode, depicted in Fig. 2, was conducted at 25 °C by repeating the UDDS-HWFET-UDDS-CSC sequence twice. The test results, which represent energy efficiency, were calculated based on data obtained during driving in the MCT mode on the chassis dynamometer and are presented in Table 4.
Under cold-start conditions, UDDS1 exhibited the lowest energy efficiency among the UDDS tests, measured at 8.53 km/kWh. It was observed that the energy efficiency improved in the UDDS section following the CSCM section drive compared with the UDDS section before the CSCM section drive. UDDS3 demonstrated approximately 5.3% higher energy efficiency than UDDS2, whereas UDDS4 exhibited approximately 4.1% higher energy efficiency than UDDS2. After the cold-start condition concluded, the battery temperature gradually rose from 23 to 25 °C during the CSC section drive, indicating enhanced performance within the battery temperature range of 25 °C. HWFET1 and HWFET2 recorded energy efficiencies of 6.92 and 6.76 km/kWh, respectively, with a marginal difference of about 2.3%. This discrepancy falls within the acceptable margin of error, as stipulated by the Korean government, which considers a 3% margin of error (K-Petro, 2014).
3.2 Comparative Analysis of Real-World Driving Tests
3.2.1 KU Route
Figure 3 displays the outcomes derived from driving along the identical route (KU Route) under ambient temperature ranging from 21 to 28 °C, similar to the 25 °C conditions maintained by the chassis dynamometer during the MCT mode as detailed in Sect. 3.1. To emulate a consistent traffic environment on the same route, data were analyzed from 13 instances in which the same driver operated the vehicle between 9 and 11 pm with the air conditioning system turned off. The energy efficiency across the urban, rural, and motorway sections is shown in Fig. 4.

Repetition of testing along the KU route
Despite driving along the same route under similar environmental conditions, variations in factors such as traffic signals and volume led to disparities of up to 20.2% in urban areas, 10.8% in rural areas, and 22.9% in motorways. This represents a substantial deviation from our previous study (Lee et al., 2024), wherein the battery consumption differed by approximately 3% under comparable ambient temperatures and traffic conditions.
In urban sections, the primary factors contributing to the differences in battery consumption were identified as the number of stops, frequent acceleration and deceleration, and specific traffic patterns. Higher instances of stopping, and frequent acceleration, and deceleration are correlated with increased battery consumption. Conversely, in rural and motorway sections characterized by fewer traffic signals, disparities in speed owing to traffic volume were identified as the principal cause. Higher average speeds are associated with lower energy efficiency.
3.2.2 Various Driving Route Meeting RDE-LDV Criteria
The data collected while driving the KU, GangNam, and KNUT routes under equal temperature conditions of 21 °C were analyzed. Considering the varying driving ranges for each section of the routes, the distance traveled for each section was divided by the amount of battery consumed and compared in km/kWh, as shown in Table 5. In the urban section, the KNUT route exhibited the highest energy efficiency of 9.58 km/kWh. This observation suggests that the KU and GangNam routes, which represent driving characteristics in metropolitan areas, experienced frequent acceleration and deceleration due to traffic signals and traffic volume. Consequently, it is inferred that the primary cause of increased battery consumption in a low-efficiency zone, as indicated by the “Stop & Go” segments in Fig. 5. The KNUT route exhibited a low frequency of deceleration and acceleration, including stopping, resulting in a high energy efficiency. Notably, in the rural section, the GangNam route demonstrated the highest energy efficiency of 9.22 km/kWh, whereas the KNUT route demonstrated the lowest efficiency of 6.52 km/kWh. The driving characteristics of the GangNam route are illustrated in Fig. 5, where the impact of acceleration and deceleration is minimal, indicating a narrow operational range and low battery consumption as the vehicle maintains a constant speed. The KNUT route is illustrated in Fig. 3. Observing the altitude data presented in Fig. 3, it is apparent that the vehicle was driving along a route with an uphill slope in a mountainous area. The significant decrease in energy efficiency in the rural section is attributable to the influence of these slopes. Notably, the motorway section exhibited the highest efficiency on the KU route at 6.08 km/kWh, owing to the lower average speed compared to the other routes and the substantial energy recovery achieved through regeneration. Conversely, the motorway section, which was minimally affected by traffic conditions, exhibited a similar performance across all routes, with a difference of only 2.3%.

Comparison of motor operating area
3.3 Comparative Analysis of Overall Results
The results derived from the MCT mode and the real-world driving tests conducted using the chassis dynamometer are depicted in Fig. 6. Additionally, the certification values of the test vehicle, incorporating the correction coefficient (0.7) applied in the MCT mode, are denoted as the certified UDDS and certified HWFET.

Comparison of test mode
In real-driving scenarios adhering to the RDE-LDV regulations, EV exhibited variances in energy efficiency ranging from 4 to 8.9% in urban sections, 14.5 to 29.3% in rural sections, and 0.7 to 2.3% in motorway sections, depending on the driving environment.
When comparing the certification tests with actual road driving routes, disparities of 2–11% were observed in the UDDS and urban sections. Conversely, the energy efficiency was notably higher on real-world roads, ranging from 32.4 to 38.4%, compared with the vehicle’s certified UDDS value of 5.9 km/kWh, which incorporated the correction coefficient (0.7). In the HWFET and motorway sections, the certification test was higher with a difference of 12.1 to 14.2%. In addition, the energy efficiency in the real world surpasses the vehicle’s certified HWFET value of 4.5 km/kWh by 24.2–26.0%. This indicates superior energy efficiency during real-world driving within a similar ambient temperature range. This underscores the significant variations in efficiency within specific regulations influenced by factors, such as route slope and traffic conditions.
4 Conclusions
The aim of this study was to compare chassis dynamometer tests of EVs with various real-world driving scenarios to ascertain the necessity of real-world driving assessments by examining the disparities between certification values declared in indoor certification and actual driving results. The principal findings of this study are summarized as follows:
-
1.
Utilizing the MCT mode of the chassis dynamometer, we confirmed the energy efficiency of UDDS1 under cold-start conditions at 8.53 km/kWh, which is the lowest among the UDDS tests. It was observed that during the CSC section drive, the battery temperature increased to 25 °C, with UDDS3 and UDDS4 demonstrating improved performance. The HWFET was within an acceptable range across tests, with an approximate error of 2.3%.
-
2.
Even when driving along the same route (KU Route) under similar conditions, disparities of 20.2% in the urban section, 10.8% in the rural section owing to factors such as traffic signals impacting acceleration and deceleration, and 22.9% in the motorway section owing to speed variances according to traffic volume were observed. Furthermore, across various routes driven under comparable conditions, discrepancies in energy efficiency ranged from 4 to 8.9% in the urban section, 14.5 to 29.3% in the rural section, and 0.7 to 2.3% in the motorway section, which is attributable to differences in the traffic environment and route slope.
This study presents diverse test results for assessing the energy efficiency and driving range of BEV. Additionally, it underscores the importance of conducting tests that reflect real-world driving conditions alongside future certification tests tailored to the unique environmental contexts of each country. The need for real-world driving evaluations is further emphasized by the limitations observed in chassis dynamometer testing. Although these tests are controlled and repeatable, they fail to account for dynamic factors such as different traffic conditions, road slopes, and environmental influences that greatly affect the performance of EVs in real-world driving scenarios. The significant discrepancies observed between dynamometer results and real-world data highlight the need for real-world driving tests to gain a more accurate and comprehensive understanding of the energy efficiency and driving range of EVs. This approach has significant implications for informing future research and policy decisions in the field.
Data availability
Data will be made available on request.
Abbreviations
- CAN:
-
Controller area network
- CSC:
-
Constant speed cycle
- EE:
-
Energy efficiency
- EV:
-
Electric vehicle
- HWET:
-
Highway fuel economy driving test
- OBD:
-
On board diagnostics
- SOC:
-
State of charge
- UDDS:
-
Urban dynamometer driving schedule
- WLTP:
-
Worldwide harmonized light vehicle test procedure
- RDE-LDV:
-
Real driving emissions-light duty vehicles
- MCT:
-
Multi-cycle test
References
Braun, A., & Rid, W. (2018). Assessing driving pattern factors for the specific energy use of electric vehicles: A factor analysis approach from case study data of the Mitsubishi i–MiEV minicar. Transportation Research Part D: Transport and Environment, 58, 225–238.
Chen, J., et al. (2022). Impact of battery cell imbalance on electric vehicle range. Green Energy and Intelligent Transportation, 1(3), 100025.
Choi, M., et al. (2021). A study on the energy efficiency prediction model of electric vehicles using numerical simulation. Transactions of the Korean Society of Automotive Engineers, 29(3), 211–217.
Cimprich, A., et al. (2023). Lightweighting electric vehicles: Scoping review of life cycle assessments. Journal of Cleaner Production, 433, 139692.
Greene, D. L., et al. (2017). What is the evidence concerning the gap between on-road and Environmental Protection Agency fuel economy ratings? Transport Policy (oxf), 53, 146–160.
Hamada, A. T., & Orhan, M. F. (2022). An overview of regenerative braking systems. Journal of Energy Storage, 52, 105033.
Hao, X., et al. (2020). Seasonal effects on electric vehicle energy consumption and driving range: A case study on personal, taxi, and ridesharing vehicles. Journal of Cleaner Production, 249, 119403.
Kang, G., et al. (2017). Development of Korean RDE routes for on-road emissions measurement of light duty vehicles. Transactions of the Korean Society of Automotive Engineers, 25(3), 287–296.
Korea Petroleum Quality and Distribution Authority (K-Petro). (2014). A study on the application of MCT test method for electric vehicles.
Lajunen, A. (2014). Energy consumption and cost-benefit analysis of hybrid and electric city buses. Transportation Research Part C: Emerging Technologies, 38, 1–15.
Lee, G., et al. (2023a). Study on energy consumption characteristics of passenger electric vehicle according to the regenerative braking stages during real-world driving conditions. Energy, 283, 128745.
Lee, G., et al. (2023b). Study on range and energy consumption efficiency of electric passenger vehicle under real-road driving conditions. Transactions of the Korean Society of Automotive Engineers, 31(5), 361–369.
Lee, G., et al. (2024). Energy consumption evaluation of passenger electric vehicle based on ambient temperature under real-world driving conditions. Energy Conversion and Management, 306, 118289.
Ma, R., et al. (2019). Real-world driving cycles and energy consumption informed by large-sized vehicle trajectory data. Journal of Cleaner Production, 223, 564–574.
Rho, K., & Noh, M. S. (2022). A study on methodology to improve time-consuming for measuring energy efficiency and range of electric vehicles. Transactions of the Korean Society of Automotive Engineers, 30(6), 499–509.
Noh, M. S., et al. (2024). Reduction in chassis dynamometer test time for evaluating energy economy and range of light-duty battery electric vehicles. International Journal of Automotive Technology, 25(1), 1–12.
Park, Y., et al. (2023). Multi-objective optimization of an offset strip fin heat exchanger for waste heat recovery in electric vehicles. Applied Thermal Engineering, 228, 120533.
Pavlovic, J., et al. (2016). CO2 emissions and energy demands of vehicles tested under the NEDC and the new WLTP type approval test procedures. Applied Energy, 177, 661–670.
Rho, K., et al. (2021). A study on improvement of MCT method for measuring energy efficiency of electric vehicles. Transactions of the Korean Society of Automotive Engineers, 29(10), 899–907.
SAE International. (2017). Battery electric vehicle energy consumption and range test procedure. Revised July 2017.
SAE International. (2021). Battery electric vehicle energy consumption and range test procedure. Revised April 2021.
Sanguesa, J. A., et al. (2021). A review on electric vehicles: Technologies and challenges. Smart Cities, 4(1), 372–404.
UNECE Global Registry. (2021). Global nations global technical regulation on worldwide harmonized light vehicles test procedures.
Yu, L., et al. (2020). Development of China light-duty passenger car test cycle. Journal of Transportation Systems Engineering and Information Technology, 20(3), 233.
Yu, Y., et al. (2019). Impact of test routes and driving style on NOx emissions of light-duty diesel vehicle over real driving emissions test. Journal of ILASS-Korea, 24(2), 73–81.
Acknowledgements
This paper was supported by Konkuk University Researcher Fund in 2023, and the Yeungnam University College Research Grants in Grant No. 20234115.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declared no competing interests. Suhan Park is an Editor of the International Journal of Automotive Technology. Editor status has no bearing on editorial consideration.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Lee, G., Park, J., Park, S. et al. Study on the Necessity of Real-World Driving Tests for Passenger Electric Vehicles. Int.J Automot. Technol. (2024). https://doi.org/10.1007/s12239-024-00108-5
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1007/s12239-024-00108-5